JP5954199B2 - 画像読取装置 - Google Patents
画像読取装置 Download PDFInfo
- Publication number
- JP5954199B2 JP5954199B2 JP2013013419A JP2013013419A JP5954199B2 JP 5954199 B2 JP5954199 B2 JP 5954199B2 JP 2013013419 A JP2013013419 A JP 2013013419A JP 2013013419 A JP2013013419 A JP 2013013419A JP 5954199 B2 JP5954199 B2 JP 5954199B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- document
- image reading
- support shaft
- reading apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/12—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using the sheet-feed movement or the medium-advance or the drum-rotation movement as the slow scanning component, e.g. arrangements for the main-scanning
- H04N1/121—Feeding arrangements
- H04N1/1215—Feeding using one or more cylindrical platens or rollers in the immediate vicinity of the main scanning line
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00519—Constructional details not otherwise provided for, e.g. housings, covers
- H04N1/00551—Top covers or the like
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00519—Constructional details not otherwise provided for, e.g. housings, covers
- H04N1/00557—Connection or assembly of components or elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00567—Handling of original or reproduction media, e.g. cutting, separating, stacking
- H04N1/0057—Conveying sheets before or after scanning
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/10—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using flat picture-bearing surfaces
- H04N1/1013—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using flat picture-bearing surfaces with sub-scanning by translatory movement of at least a part of the main-scanning components
- H04N1/1017—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using flat picture-bearing surfaces with sub-scanning by translatory movement of at least a part of the main-scanning components the main-scanning components remaining positionally invariant with respect to one another in the sub-scanning direction
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Facsimile Scanning Arrangements (AREA)
- Holders For Sensitive Materials And Originals (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Electrophotography Configuration And Component (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
- Facsimiles In General (AREA)
- Transmission Devices (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
Description
これにより、本発明に係る保持部(69)は、補強部材(73)により補強された構成となる。さらに、補強部材(73)は、保持部(69)と案内部材(65)との間を渡すように延びた状態で保持部(69)及び案内部材(65)に固定された構成となる。したがって、保持部(69)及び案内部材(65)に歪みが発生することを抑制できる。
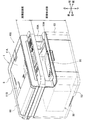
本実施形態に係る画像形成装置100は、図1に示すように、画像読取装置1と画像形成部50とが一体化されている。画像形成部50は筐体53内に収納されている。筐体53の上部にはジョイントカバー53Aが設けられている。ジョイントカバー53Aは、画像読取装置1と画像形成部50側とを空間53Bを隔てて接続する。
画像読取装置1は、搬送原稿読取機能、及び載置原稿読取機能を兼ね備えている。搬送原稿読取機能は、搬送される原稿を読み取る機能である。載置原稿読取機能は、図2に示す原稿台3の載置面3Aに載置される原稿を読み取る機能である。
本実施形態では、1つの駆動源31にて移動機構9及び搬送機構60を駆動している。つまり、駆動力伝達機構13は、図5に示すように、電動モータ等の駆動源31で発生した駆動力を選択的に移動機構9又は搬送機構60に伝達している。なお、駆動源31及び駆動力伝達機構13は、原稿台3内のうち載置面3Aより下側に配置されている。
そして、太陽歯車15が逆転しているときには、遊星歯車17を第3ポジション側から第4ポジション側に公転させる力が遊星歯車17に作用する。このため、本実施形態では、少なくとも搬送機構60に駆動力を伝達している間、つまり、第2出力歯車23と噛み合って太陽歯車15が逆転している間は、仮に第2規制力が無くても、遊星歯車17は第4ポジションに止まり続ける。
駆動力伝達機構13により第2出力歯車23に伝達された駆動力は、図10に示すように、少なくとも第1歯車41、第2歯車42及び第3歯車43を介して搬送機構60に伝達される。
駆動源31は、駆動力伝達機構13、つまり太陽歯車15に駆動力を供給する。駆動源31の正転、逆転及び停止は、制御部30により制御される。なお、制御部30は、CPU、ROM及びRAM等を有するマイクロコンピュータにて構成されている。
6.1 載置原稿読取機能の作動時(図6参照)
画像読取装置1の非稼働時には、撮像部7は待機位置にあり、遊星歯車17は第3ポジションに位置している。そして、読取開始スイッチ35が利用者により操作されて載置原稿読取機能による読み取りが開始されると、制御部30は、駆動源31を正転させて太陽歯車15を正転させる。
画像読取装置1の非稼働時には、撮像部7は待機位置にあり、遊星歯車17は第3ポジションに位置している。そして、読取開始スイッチ35が利用者により操作されて搬送原稿読取機能による読取開始の指示がされると、制御部30は、駆動源31を逆転させて太陽歯車15を逆転させる。
<駆動力伝達機構>
本実施形態では、上述したように、太陽歯車15、遊星歯車17及び噛合部19等を有する遊星歯車機構を備え、太陽歯車15の回転方向を切り替えることにより、駆動力の伝達を切り替えることができる。
これにより、本実施形態では、遊星歯車17と内歯歯車19とが噛み合うときには、先ず、遊星歯車17の歯を構成する突起部と第1衝突面19E又は第2衝突面19Fとが衝突する。
本実施形態では、補強部材73の長手方向一端側を保持部69に固定する第1固定部75Aと、補強部材73の長手方向他端側を案内部材65に固定する第2固定部75Bとを備えることを特徴としている。
しかし、本実施形態のごとく、第1歯車41及び第2歯車42を円錐状のかさ歯車で構成すれば、第1歯車41及び第2歯車42をウォーム及びウォームホィールにて構成する場合に比べて、駆動力の伝達効率を向上させることが可能となる。
また、本実施形態では、保持部69又は案内部材65には、第1支持軸41Aを保持する第1軸受部71Aが設けられており、さらに、第3固定部75Dは、第1軸受部71Aに対応する部位に設けられていることを特徴としている。
そして、本実施形態では、大きな力が作用する可能性が高い部位、つまり第1軸受部71Aに対応する部位に第3固定部75Dが設けられている。したがって、保持部69又は案内部材65をより確実に補強することができる。
また、本実施形態では、搬送される原稿を搬送ローラ63に押し付けるピンチローラ67と、ピンチローラ67を搬送ローラ63に向けて押圧する押圧力を発揮する弾性部材67Aと、補強部材73に設けられた荷重受部であって、押圧力の発揮に伴って弾性部材67Aに発生する反作用を受ける荷重受部73Fとを備えることを特徴としている。
これにより、本実施形態では、単純な帯板状に構成された補強部材に比べて、補強部材73の断面二次モーメントが大きくなる。したがって、補強部材73の曲げ剛性を高めることできる。
これにより、本実施形態では、組立作業者は、例えば、以下の手順にて組み立て作業を行うことが可能となる。つまり、組立作業者は、先ず、差込穴69Eに差込部73Aを差し込む。次に、組立作業者は、ネジを締め込む。これにより、組立作業者は、補強部材73を容易に組み付けることができるので、組立作業工数の増加を抑制できる。
これにより、案内部材65は、第2凸部66B及び第2凹部69B、並びに第3凸部66C及び第3凹部69Cにより支持された構成となる。したがって、案内部材65の経年変形が拡大することを抑制できる。延いては、第1歯車41と第2歯車42との噛み合いに不具合が発生することを長期に亘って抑制できる。
また、本実施形態では、剛性の高い壁部69Dに第1軸受部71Aが設けられていることを特徴としている。これにより、第1軸受部71Aの位置を確実に保持できるので、第1歯車41と第2歯車42との噛み合いに不具合が発生することを長期に亘って抑制できる。
上述の実施形態では、1つの駆動源31が原稿台3に配設され、かつ、移動機構9及び搬送機構60のうちいずれか一方に駆動力を選択的に伝達していたが、本発明はこれに限定されるものではない。
また、上述の実施形態では、保持部69の壁部69Dに第1軸受部71Aが設けられていたが、本発明はこれに限定されるものではない。
また、上述の実施形態に係る補強部材73は、断面形状がL字状に形成され、かつ、荷重受部73F及び窪み部73Eが設けられていたが、本発明はこれに限定されるものではない。
また、上述の実施形形態では、アーム17Aに介して遊星歯車17が支持されていたが、本発明はこれに限定されるものではなく、例えば、公転経路Loに沿った円弧状の長穴に遊星歯車17の軸を摺動可能に挿入した構成としてもよい。
また、上述の実施形態では、撮像部7としてCISを用いたが、本発明はこれに限定されるものではなく、撮像部7としてCCDを用いてもよい。
また、上述の実施形態に係る第2歯車42は、第1ベベル部42A及び第2ベベル部42Bが一体となった歯車であったが、本発明はこれに限定されるものではない。
3C… 第2読取窓 3D… 区画部材 3E… 調整基準 3H… 第2ストッパ部
3J… 第3ストッパ部 5A… ヒンジ機構 5… 原稿カバー7… 撮像部
9… 移動機構 9B… 第1歯付プーリ 9C… 第2歯付プーリ
9A… 歯付ベルト 11A… 原稿トレイ 11B… 排出トレイ
13… 駆動力伝達機構 13A… 出力部 15… 太陽歯車 17… 遊星歯車
17A… アーム 17B… 第2被接触部 17C… 第3被接触部
19… 噛合部、内歯歯車 19A… 突起部 21… 第1出力歯車
23A… 第5衝突面 25… 負荷発生部 25A… 第1被接触部
25B… 第1ストッパ部 30… 制御部 31… 駆動源 33… 原稿センサ
35… 読取開始スイッチ 37… 回転角検出部 41… 第1歯車
41A… 第1支持軸 42… 第2歯車 42C… 第2支持軸
43… 第3歯車 45… 継手部 50… 画像形成部 53… 筐体
53A… ジョイントカバー 53B… 空間 55… 排出トレイ
60… 搬送機構 61A… 吸引ローラ 61B… 分離ローラ
61C… 排出ローラ 63… 搬送ローラ 65… 案内部材 65A… 搬送路
65D… 壁部 65E… 支持部 66A… 第1凸部 66B… 第2凸部
66C… 第3凸部 67… ピンチローラ 67A… 弾性部材
69… 保持部 69D… 壁部 69A… 第1凹部 69B… 第2凹部
69C… 第3凹部 69E… 差込穴 69E… 保持部 71A… 第1軸受部
71B… 第2軸受部 73… 補強部材 73A… 差込部 73D… 位置決め部
73E… 部 73F… 荷重受部 75A… 第1固定部 75B… 第2固定部
75D… 第3固定部 100… 画像形成装置
Claims (15)
- 搬送される原稿を読み取る搬送原稿読取機能を有する画像読取装置において、
少なくとも前記搬送原稿読取機能の作動時に、原稿に接触して回転する搬送ローラと、
原稿の搬送を案内する案内部材であって、原稿の搬送路を構成する案内部材と、
前記搬送ローラに至る駆動力の伝達経路に設けられた第1歯車と、
前記搬送路の幅方向と平行な方向に延びる第1支持軸であって、前記第1歯車を支持する第1支持軸と、
前記伝達経路に設けられた歯車であって、前記第1歯車と噛み合う第2歯車と、
前記第1支持軸と直交する方向に延びる第2支持軸であって、前記第2歯車を支持する第2支持軸と、
前記第2支持軸を保持する保持部であって、前記搬送路の幅方向一端側に設けられた保持部と、
前記幅方向と平行な方向に延びる金属製の補強部材と、
前記補強部材の長手方向一端側を前記保持部に固定する第1固定部と、
前記補強部材の長手方向他端側を前記案内部材に固定する第2固定部と
を備えることを特徴とする画像読取装置。 - 前記第1歯車及び前記第2歯車は、円錐状のかさ歯車であることを特徴とする請求項1に記載の画像読取装置。
- 前記補強部材の長手方向他端側は、前記搬送路の幅方向他端側に対応する部位まで延びており、
さらに、前記第1固定部と前記第2固定部との間に設けられた第3固定部であって、前記補強部材を前記保持部又は前記案内部材に固定する第3固定部を備えることを特徴とする請求項1又は2に記載の画像読取装置。 - 前記保持部又は前記案内部材には、前記第1支持軸を保持する第1軸受部が設けられており、
さらに、前記第3固定部は、前記第1軸受部に対応する部位に設けられていることを特徴とする請求項3に記載の画像読取装置。 - 前記第1支持軸は、前記搬送路の幅方向一端側に対応する部位から他端側に対応する部位まで延び、
前記第1軸受部は、前記搬送路の幅方向一端側に対応する部位に設けられており、
前記案内部材のうち前記搬送路の幅方向他端側に対応する部位には、前記第1支持軸を保持する第2軸受部が設けられており、
さらに、前記第2固定部は、前記搬送路の幅方向他端側に対応する部位に設けられていることを特徴とする請求項4に記載の画像読取装置。 - 搬送される原稿を前記搬送ローラに押し付けるピンチローラと、
前記ピンチローラを前記搬送ローラに向けて押圧する押圧力を発揮する弾性部材と、
前記補強部材に設けられた荷重受部であって、前記押圧力の発揮に伴って前記弾性部材に発生する反作用を受ける荷重受部と
を備えることを特徴とする請求項1ないし5のいずれか1項に記載の画像読取装置。 - 前記補強部材のうち前記ピンチローラに対応する部位に設けられた窪み部であって、前記ピンチローラから離間する向きに窪んだ窪み部を備えることを特徴とする請求項6に記載の画像読取装置。
- 前記補強部材は、長手方向と直交する断面の形状が略L字状であることを特徴とする請求項1ないし7のいずれか1項に記載の画像読取装置。
- 前記保持部及び前記案内部材は、樹脂製であることを特徴とする請求項1ないし8のいずれか1項に記載の画像読取装置。
- 前記保持部と前記案内部材とは、非一体部材であり、
さらに、前記案内部材及び前記保持部のうち一方には、他方に設けられた凸部が嵌り込む凹部が設けられていることを特徴とする請求項1ないし9のいずれか1項に記載の画像読取装置。 - 前記第1固定部及び前記第2固定部のうち一方の固定部はネジ方式であり、他方の固定部は、差込部が差込穴に差し込まれた差込方式であることを特徴とする請求項1ないし10のいずれか1項に記載の画像読取装置。
- 前記搬送原稿読取機能に加え、原稿台の載置面に載置される原稿を読み取る載置原稿読取機能を有し、
前記載置面を覆う位置と前記載置面から離間した位置との間で変位する原稿カバーを備え、
さらに、前記搬送ローラ、前記案内部材、前記第1歯車、前記第2歯車、前記第1支持軸、前記第2支持軸、前記保持部、前記補強部材、前記第1固定部及び前記第2固定部は、前記原稿カバーに設けられていることを特徴とする請求項1ないし11のいずれか1項に記載の画像読取装置。 - 前記駆動力を発生する駆動源は、前記原稿台に設けられていることを特徴とする請求項12に記載の画像読取装置。
- 前記第1歯車、前記第1支持軸及び前記搬送ローラは、一体化されて同時に回転することを特徴とする請求項1ないし13のいずれか1項に記載の画像読取装置。
- 前記補強部材の長手方向一端側は、前記保持部のうち前記第2支持軸に対応する部位まで延びていることを特徴とする請求項1ないし14のいずれか1項に記載の画像読取装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013419A JP5954199B2 (ja) | 2013-01-28 | 2013-01-28 | 画像読取装置 |
| US14/165,639 US8922851B2 (en) | 2013-01-28 | 2014-01-28 | Image scanning device |
| CN201410042247.XA CN103973923B (zh) | 2013-01-28 | 2014-01-28 | 图像扫描装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013013419A JP5954199B2 (ja) | 2013-01-28 | 2013-01-28 | 画像読取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014146919A JP2014146919A (ja) | 2014-08-14 |
| JP5954199B2 true JP5954199B2 (ja) | 2016-07-20 |
Family
ID=51222650
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013013419A Active JP5954199B2 (ja) | 2013-01-28 | 2013-01-28 | 画像読取装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8922851B2 (ja) |
| JP (1) | JP5954199B2 (ja) |
| CN (1) | CN103973923B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7243338B2 (ja) * | 2019-03-19 | 2023-03-22 | 富士フイルムビジネスイノベーション株式会社 | 画像読取装置及び画像形成装置 |
| WO2021196157A1 (en) * | 2020-04-03 | 2021-10-07 | Hewlett-Packard Development Company,L.P. | Gear trains |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2851303B2 (ja) * | 1989-05-18 | 1999-01-27 | 株式会社リコー | プリンター装置 |
| JPH0563932A (ja) * | 1991-08-30 | 1993-03-12 | Canon Inc | フアクシミリ装置 |
| US5442466A (en) * | 1992-07-13 | 1995-08-15 | Mita Industrial Co., Ltd. | Plate sheet conveying mechanism having integrally formed sheet guide |
| JPH0720665A (ja) * | 1993-06-17 | 1995-01-24 | Canon Inc | プロセスカートリッジ及び画像形成装置 |
| JPH07283902A (ja) * | 1994-04-07 | 1995-10-27 | Fujitsu Ltd | 画像読み取り装置 |
| JPH0974468A (ja) * | 1995-09-04 | 1997-03-18 | Canon Inc | 画像処理装置 |
| JP2000233874A (ja) | 1999-02-12 | 2000-08-29 | Canon Inc | 原稿自動搬送装置及び画像形成装置 |
| JP2001075192A (ja) * | 1999-09-06 | 2001-03-23 | Canon Inc | 画像読取装置 |
| JP3968938B2 (ja) | 2000-02-24 | 2007-08-29 | 村田機械株式会社 | 原稿押圧板 |
| JP2006086817A (ja) * | 2004-09-16 | 2006-03-30 | Sharp Corp | 画像読取装置 |
| KR100561373B1 (ko) * | 2004-11-26 | 2006-03-17 | 삼성전자주식회사 | 양면 스캐닝장치 및 그 제어방법 |
| JP4301223B2 (ja) * | 2005-08-23 | 2009-07-22 | ブラザー工業株式会社 | 原稿搬送装置 |
| JP2007139882A (ja) * | 2005-11-15 | 2007-06-07 | Ricoh Co Ltd | 画像形成方法および画像形成装置 |
| US7948663B2 (en) * | 2007-04-25 | 2011-05-24 | Hewlett-Packard Development Company, L.P. | Document transport |
| JP2009263128A (ja) * | 2008-04-02 | 2009-11-12 | Ricoh Co Ltd | ベルトユニット、画像読取装置及び画像形成装置。 |
| JP4853538B2 (ja) | 2009-03-17 | 2012-01-11 | 富士ゼロックス株式会社 | 画像読取装置 |
| JP5056924B2 (ja) | 2010-08-30 | 2012-10-24 | ブラザー工業株式会社 | 画像読取装置 |
-
2013
- 2013-01-28 JP JP2013013419A patent/JP5954199B2/ja active Active
-
2014
- 2014-01-28 US US14/165,639 patent/US8922851B2/en active Active
- 2014-01-28 CN CN201410042247.XA patent/CN103973923B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN103973923B (zh) | 2016-09-21 |
| US20140211282A1 (en) | 2014-07-31 |
| JP2014146919A (ja) | 2014-08-14 |
| CN103973923A (zh) | 2014-08-06 |
| US8922851B2 (en) | 2014-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5203694B2 (ja) | 画像処理装置、シート搬送装置 | |
| JP5978235B2 (ja) | 定着装置及び画像形成装置 | |
| JP2679890B2 (ja) | ファクシミリ装置 | |
| JP2017224994A (ja) | 媒体給送装置及び画像読取装置 | |
| JP5954199B2 (ja) | 画像読取装置 | |
| JP2014107743A (ja) | 画像読取装置及び画像形成装置 | |
| JP5978896B2 (ja) | 読取装置 | |
| JP2012180217A (ja) | 媒体搬送装置、スキャナ装置、記録装置 | |
| JP3744516B2 (ja) | 用紙搬送装置 | |
| JP5327291B2 (ja) | 画像読取装置及び画像形成装置 | |
| JP5093278B2 (ja) | 画像読取装置 | |
| US8474813B2 (en) | Blocking module and multi-function printer using the same | |
| JP4635830B2 (ja) | 原稿搬送装置 | |
| JP6142832B2 (ja) | シート分離装置 | |
| JP4375368B2 (ja) | 用紙搬送機構及びこれを備えた画像形成装置 | |
| JP2001080753A (ja) | 給紙装置 | |
| CN108696655A (zh) | 图像读取装置 | |
| JP6098926B2 (ja) | 画像読取装置 | |
| JP5472172B2 (ja) | 画像読み取り装置 | |
| JP2016160006A (ja) | シート搬送装置 | |
| JP4735570B2 (ja) | モーター位置決め構造 | |
| JP7028347B2 (ja) | 画像読取装置 | |
| JP5545330B2 (ja) | 画像処理装置、シート搬送装置 | |
| KR20110069706A (ko) | 자동 원고 반송 장치 및 이를 구비한 원고 판독 장치 | |
| JP2012180216A (ja) | 媒体搬送装置、スキャナ装置、記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150403 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20160510 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5954199 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |