JP5929227B2 - 基板保持用枠体と基板保持用枠体の搬送方法 - Google Patents
基板保持用枠体と基板保持用枠体の搬送方法 Download PDFInfo
- Publication number
- JP5929227B2 JP5929227B2 JP2012011454A JP2012011454A JP5929227B2 JP 5929227 B2 JP5929227 B2 JP 5929227B2 JP 2012011454 A JP2012011454 A JP 2012011454A JP 2012011454 A JP2012011454 A JP 2012011454A JP 5929227 B2 JP5929227 B2 JP 5929227B2
- Authority
- JP
- Japan
- Prior art keywords
- frame
- substrate holding
- substrate
- holding frame
- metal frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Stackable Containers (AREA)
- Packaging Frangible Articles (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
基板の例としては薄板ガラス基板があり、特には、プラズマディスプレイ、有機ELディスプレイ、液晶表示装置用のカラーフィルター基板、それらの中間製品、その他の各種基板等を挙げることができる。
これらの大型の基板は撓みやすく、四周縁辺部のみを支持した場合には、下方にやや湾曲した状態になるが、多段積みした際に基板の相互間が接触しないようにし、かつ高い密度に積層する必要がある。さらに、搬送時や保管時の振動による破損や割れから基板を保護する必要があり、塵埃の混入や汚染を防止する必要もある。
しかし、これら液晶表示ディスプレイ、プラズマ表示ディスプレイ、有機ELディスプレイに代表されるフラットパネルディスプレイ製品は、表示装置自体が大型化していること、小サイズ物であっても多面付けの状態で製造されること等のため、用いられる基板やその中間製品等は大サイズ化しており、1メートル角程度のサイズにもなると、0.7mm厚のガラス基板でも対向する2辺または4辺を支持した場合は、中間部が100mm以上も下方(重力方向)に湾曲した状態になるのを避けられない。基板はさらに2メートル角以上の大サイズ化が求められており、保管スペースや取り扱い装置の問題からこのような基板を高密度で安全に保管し、取り扱いできるようにする必要がある。
図11は、従来の基板保持用枠体の一般的形態である。基板保持用枠体10は、断面が矩形状の中空構造である金属枠材を組み立てして、対向する1対の左右辺11a、11bと他の対向する1対の前後辺11c、11dからなる平面視矩形状の金属枠部11で構成されている。各金属枠部11の4隅は、コーナーピース16により接合されている。枠体の全体を平面にする場合もあるが、対応する1対の前後辺11c、11dの中央部を下方に湾曲させる場合が多い。
左右の辺(一般に基板の長辺側を載せる辺)には、手掛部15が形成され、基板保持用枠体をロボットで搬送する際の把持部にされている。
基板を基板保持用枠体10に載せて、100〜150段の多段積み重ね体100にし、上面に上蓋21を被せ、下段にインナーパレット30をあてがい、ベルト23で結束し、さらに防振パレット40に乗せた梱包状態にして搬送するのが一般的である。
まず、図10(A)(B)のように、枠体搬送装置50に備えられたシリンダ51が下降する。次に、(C)のように、シリンダ51の引き掛け部52を枠体10の手掛部15の下面に差し込みする。この状態で、シリンダ51が上昇すれば、引き掛け部52と手掛部15が係合しその状態(D)で、基板保持用枠体10を搬送できる。
このように従来は、手掛部15で、枠体を把持する方法が一般に行われている。
従って、製造工程における基板の取扱いは勿論、工程間における基板の搬送及び保管についても異物や傷などが付かない様に取り扱うことが今まで以上に重要になってきている。
基板の積載効率を上げる為、枠体は、高密度に重ねる工夫がなされ、G6(第6世代)サイズの基板で積層する枠体の間隔は、10mm程度まで狭くすることも可能となり、これに伴い外周に突出した手掛部15の間隔も同じように狭くなる。
従って、ロボットハンドが積層された枠体の両側面の突出した手掛部15を掴む裕度が狭くなり、手掛部15のわずかな変形も把持不良となる。
ロボットハンドが把持する手掛部15は、外周枠から外側に延出している為、搬送時の接触により、変形が生じる事があり、これによりロボットハンドによる把持不良が発生する事がある。本発明は、このような把持不良を解決しようとするものである。
また、積層した梱包物をトラック輸送や海上輸送などに用いるコンテナへの収納の観点からも枠体幅サイズの縮小は、重要な課題となってきている。
基板の輸送形態は、基板を保持した高重量物の枠体を載置できる十分な強度を有するパレット上に枠体を積み重ね一番上に蓋を載せベルトなどで固定した積層物を輸送中の振動を和らげる防振台に載置したものをカバーで全体を覆った状態である。
40フィートコンテナは、長さ(12.2m)×幅8ft(2.438m)となる。
一般的なコンテナにおいて、幅方向における外寸は2,438mm(8フィート)であり、幅方向における内寸は約2,346〜2,352mmである。
基板サイズは、G7サイズで2200*1900mm、G8サイズで2500*2200mmと大きくなり、これらの梱包体のパレットサイズは、幅方向が2100mm以上で2400mmを超えることも推察され、40フィートコンテナの内寸幅方向で収納が難しい状態となる。
本発明は、このような荷扱いの課題についても解決しようとするものである。
前記吸着は、枠体搬送装置のロボットハンドに取り付けられたシリンダ先端が有する吸着パッドが行うことを特徴とする請求項3記載の基板保持用枠体の搬送方法、にある。
図1に示すように基板保持用枠体10は、左右に対向する1対の平坦な金属枠材11a、11bと前後に対向する1対の中央部が下方に湾曲した金属枠材11c、11dとをコーナーピース16で連結し平面視矩形状に構成した金属枠部11と、該金属枠部11の四辺から内周側に延設した基板支持板13を有する構成にされている。左右の金属枠材11a、11bの断面形状は上面が凹形状であり、下面が下方に突出する凸形状であって、前記凹形状は金属枠材の全長にわたって連続した凹部を形成し、前記凸形状は金属枠材の全長にわたって連続した凸部を形成しており、上面の凹部の深さが下面の凸部の突出高さよりも大きく形成されている。金属枠材を全長にわたり連続した凹部や凸部を形成するのは、製作の容易性からであるが、必ずしも全長にわたり、連続する必要はない。2枚の基板保持用枠体を上下に重ねた場合に、上側の基板保持用枠体の前記凸部が、下側の基板保持用枠体の前記凹部に嵌合することに特徴がある。金属枠部は、図2に断面図を示すが、図2Aに示すように金属枠部の上面と下面が平坦な場合は、積み重ねた時に吸着部が上側の枠体に密着する。
金属枠部11は図3Bに示すように中空構造にしても良い。中空構造では、重量を軽減でき、相対的に強度を高められるからである。
吸着部17は、金属枠部11の上面の凹部の平坦な底部であり、枠体10を懸垂する際に枠体搬送装置50の吸着パッド60が吸着する部分である。
左右の金属枠材の長手方向に連続した平坦な面であるため、吸着パッド60の位置ずれや吸着パッドを円形でなく、楕円形状も可能である。金属枠部11の狭い平坦部に吸着面積を広げることが可能となる。
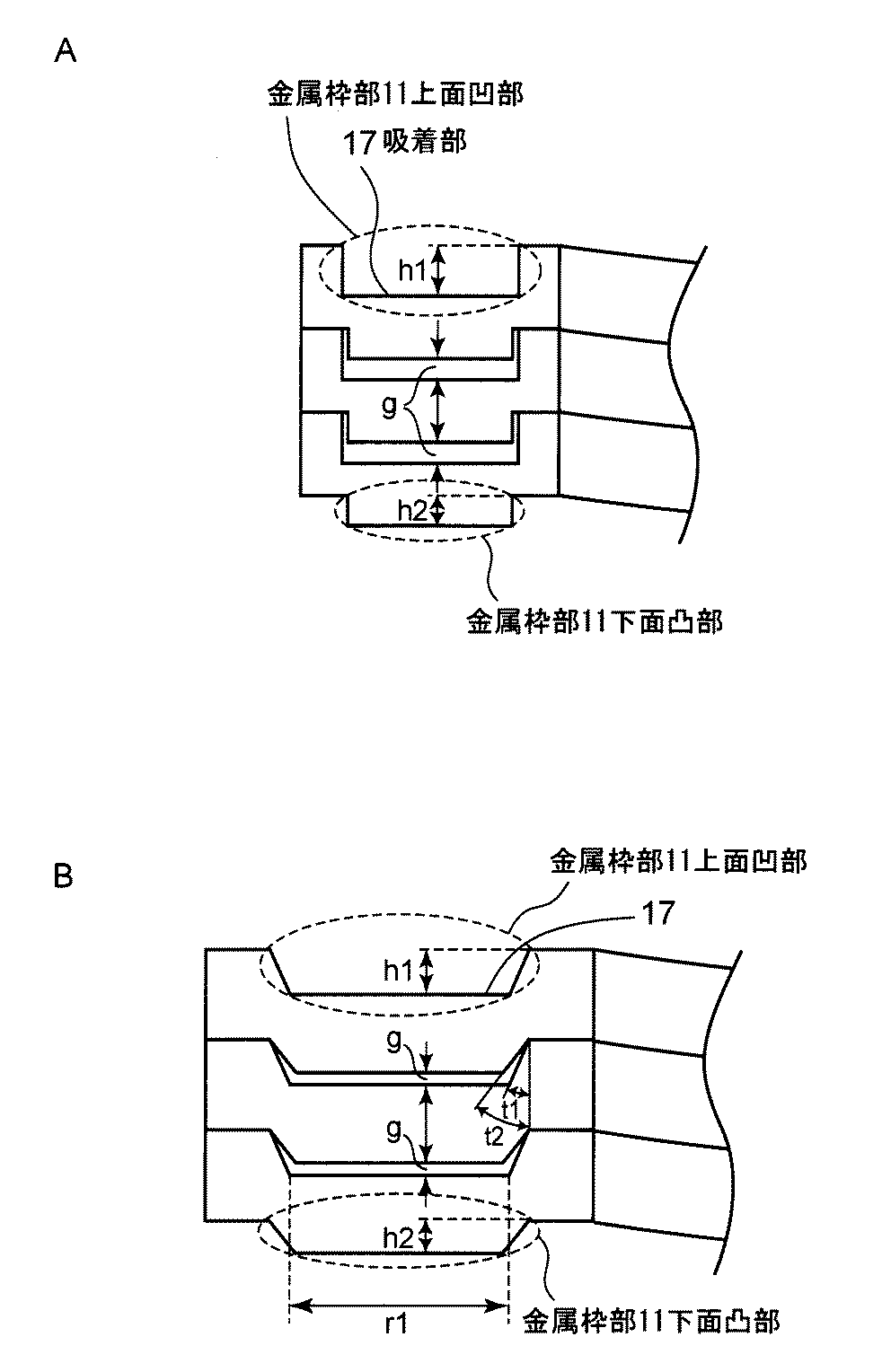
図4Aは、段差部に傾斜がついてない形状を示すもので、図4Bは斜め傾斜がついている形状を示すものである。h1は上面の凹形状の段差の高さであり、h2は、下面の凸形状の段差の高さである。t1は、上面の凹部の側面の傾斜の角度で、t2は、下面の凸部の側面の傾斜の角度である。該上面の凹部の側面の傾斜角度t1と、下面の凸部の側面の傾斜角度t2は同一であっても良いが、凹部の傾斜角度t1を凸部の傾斜角度t2よりも、1度〜5度の範囲で小さくすることが、重ねられた枠体の分離を容易にすることができる。
gは、基板保持用枠体を積み重ねた枠体間の隙間である。r1は、上面の凹部の底部の平坦部の幅である。
h1とh2の差分が枠体間の隙間gとなる。隙間は、枠体を重ねた際に吸着部17が上側に位置する枠体10に接触しない為に少なくても1から2mmあれば、良い。
吸着部17は、金属枠部11の上面の凹部の底部であり、吸着パッドが吸着する底部は、幅方向の寸法r1は、狭いが、左右の金属枠材の長手方向には、長くとれるため、吸着パッドは、幅方向に短く、長手方向に長い楕円形状にすることにより拡大できる。
図6Aは、吸着パッド60が金属枠部11a及び11bの上面の凹部の底部で、金属枠部11aの両側に中央部から均等な距離に位置する2箇所と11bも同じ配置の2箇所で吸着する場合を示す。図6Bは、吸着パッド60が、金属枠部11a及び11bの上面の凹部の底部で、金属枠部11aの左右の金属枠材の長手方向の中央部1箇所と両側に均等な距離に位置する2箇所の全部で3箇所と11bも同じ配置の3箇所で吸着する場合を示す。図6Cは、金属枠部11aの両端部2箇所と両端部から内側にそれぞれ均等な距離2箇所の全部で4箇所と11bも同じ配置の4箇所で吸着する場合を示す。1対の金属枠部のそれぞれの吸着位置は、懸垂する時にバランスがとるため対称な配置である。吸着箇所は、積載する基板と基板保持用枠体を合わせた重量と吸着パッドの面積と吸着する負圧の圧力によって決まる。
最初に図7を用いて、上記基板保持用枠体10を吸着して懸垂する枠体搬送装置50の構成について説明する。
枠体搬送装置50は、ロボットハンド55とロボットハンドの動作を制御するロボット70とにより構成される。該ロボットハンド55は、水平に回転動作を行う回転アーム71、上下動作と前後動作を行う上下アーム72と基板保持用枠体10を吸着保持して懸垂動作を行う懸垂装置56から構成される。
懸垂装置56は、基板保持用枠体10を吸着保持する杆体57と杆体を保持する枠体とを少なくても有する構成にされている。
杆体57は、金属枠部11の上面に密着して封じして減圧状態で吸着する吸着パッド60と吸着パッドを保持するシリンダ51とシリンダ駆動装置58とを少なくても有する構成にされている。
本発明の基板保持用枠体は、吸着パッドで水平に吊り上げるものであり、数1で用いられる安全率は、4として、パッドの面積とそのパッドを使用した時に生じる真空圧力とで吊り上げ力が求められる。
第6世代基板(1850*1500mm 0.7mmt)を例にすると、その重量は、約5.0kgである。図1に示す第6世代基板を保持する基板保持用枠体で、対向する1対の金属枠部が長手方向に湾曲形状で、図3Bに示す金属枠部の断面が中空で、金属枠部の高さdが10mmで、板の厚さが2mmtのアルミニウム製の基板保持用枠体の重量は、5.5kgである。従って、該基板を保持した状態での基板保持用枠体全体の総重量が10.5kgとなる。
真空圧力−70kPaでの楕円形状の吸着パッド1個当たりの吊り上げ力を表2に示す。
パッドの材質は、ニトリルゴム、シリコーンゴム、ウレタンゴム、フッ素ゴム、クロロプレインゴム等があり、使用目的により、選択される。液晶デイスプレイパネル用の基板の取扱いに対しては、直接に基板に接触するものではないが、汚染した場合に後の工程でポリイミドの配向膜の塗布工程で塗布膜のはじき現象が生じる可能性があるため、シリコーン系ゴムやフッ素系ゴムは、使用を避けた方が良い。
吸着パッドの材質は、吸引した時の密閉性があり、高重量物を懸垂した時の加重に対して強度を持つ材料が好ましい。
嵌合部は、金属枠部の上面の凹部と、下面の下側に凸部とした。凹形状と凸形状のそれぞれの断面は、金属枠部を積み重ねるのが容易にする為に斜め傾斜にした。図4Bの各寸法は、以下とした。
基板1850*1500mm 0.7mmtのガラス基板の重量は、5kgでアルミ製の基板保持用枠体は、5.5kgで総重量は10.5kgであった。
11 金属枠部(金属枠材)
11a,11b 左右の金属枠部(金属枠材)
11c,11d 前後の金属枠部(金属枠材)
12 嵌合部
13 基板支持板
15 手掛部
16 コーナーピース
17 吸着部
20 上蓋
21 表面板
22 結束機構
23 結束ベルト
30 インナーパレット
40 防振パレット
50 基板保持用枠体の搬送装置
51 シリンダ
52 引き掛け部
55 ロボットハンド
56 懸垂装置
57 杆体
58 シリンダ駆動装置
60 吸着パッド
70 ロボット
71 回転アーム
72 上下アーム
100 枠体の多段積み重ね体
A 基板
K 基板保持用枠体の空間域
Claims (4)
- 左右に対向する1対の平坦な金属枠材と、前後に対向する1対の中央部が下方に湾曲した金属枠材と、を四辺に備えた平面視矩形状の金属枠部と、該金属枠部の各辺から内周側に延設した基板支持板を有する基板保持用枠体において、
前記左右の金属枠材の断面形状は上面が凹形状であり、下面が下方に突出する凸形状であって、
前記凹形状は前記左右の金属枠材の全長にわたって連続した凹部を形成し、前記凸形状は前記左右の金属枠材の全長にわたって連続した凸部を形成しており、
前記凹部の深さが前記凸部の突出高さよりも大きく形成され、該基板保持用枠体を上下に重ねた場合に、上側の基板保持用枠体の前記凸部が、下側の基板保持用枠体の前記凹部に嵌合することを特徴とする基板保持用枠体。 - 前記凹部の両側面と前記凸部の両側面のいずれもが、上方に開いた傾斜面であることを特徴とする請求項1に記載の基板保持用枠体。
- 請求項1または請求項2に記載の基板保持用枠体の前記凹部の底部を吸着して懸垂搬送することを特徴とする基板保持用枠体の搬送方法。
- 前記吸着は、枠体搬送装置のロボットハンドに取り付けられたシリンダ先端が有する吸着パッドが行うことを特徴とする請求項3記載の基板保持用枠体の搬送方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011454A JP5929227B2 (ja) | 2012-01-23 | 2012-01-23 | 基板保持用枠体と基板保持用枠体の搬送方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012011454A JP5929227B2 (ja) | 2012-01-23 | 2012-01-23 | 基板保持用枠体と基板保持用枠体の搬送方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013147286A JP2013147286A (ja) | 2013-08-01 |
| JP5929227B2 true JP5929227B2 (ja) | 2016-06-01 |
Family
ID=49045215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012011454A Active JP5929227B2 (ja) | 2012-01-23 | 2012-01-23 | 基板保持用枠体と基板保持用枠体の搬送方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5929227B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6617919B2 (ja) * | 2015-12-02 | 2019-12-11 | Dic株式会社 | 物品の解体方法 |
| CN106915571A (zh) * | 2015-12-28 | 2017-07-04 | 法国圣戈班玻璃公司 | 用于承载玻璃板的托架以及玻璃运输架 |
| CN107098029A (zh) * | 2017-06-13 | 2017-08-29 | 杨斗华 | 玻璃放置支架 |
| PL3422396T3 (pl) * | 2017-06-28 | 2021-12-13 | Meyer Burger (Germany) Gmbh | Urządzenie do transportu substratu, urządzenie do obróbki z płytą mieszczącą dostosowaną do nośnika substratu takiego urządzenia oraz sposób przetwarzania substratu za pomocą takiego urządzenia do transportu substratu oraz układ do obróbki |
| JP6838569B2 (ja) * | 2018-01-04 | 2021-03-03 | 信越半導体株式会社 | ウェーハ処理装置及びエピタキシャルウェーハの製造方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006168749A (ja) * | 2004-12-14 | 2006-06-29 | Kyokuhei Glass Kako Kk | ガラス搬送用枠体 |
| JP2011084292A (ja) * | 2009-10-14 | 2011-04-28 | Toppan Printing Co Ltd | 緩衝材輸送トレイ |
| JP2012000692A (ja) * | 2010-06-14 | 2012-01-05 | Sharp Corp | 吸着装置、当該吸着装置を備えた気相成長装置、および吸着方法 |
-
2012
- 2012-01-23 JP JP2012011454A patent/JP5929227B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013147286A (ja) | 2013-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5929227B2 (ja) | 基板保持用枠体と基板保持用枠体の搬送方法 | |
| JP5928698B2 (ja) | 枠体搬送装置および枠体搬送装置を用いた吸着方法と吸着解除方法 | |
| JP4853204B2 (ja) | 板状物の搬送方法および板状物の搬送装置 | |
| JP5790112B2 (ja) | 基板保持用枠体と薄板基板の梱包体 | |
| KR101364947B1 (ko) | 판상체의 수납 방법 및 수납 장치 | |
| JP4893579B2 (ja) | 板状物用トレイと板状物の積層方法 | |
| JP2013071735A (ja) | 基板保持用枠体と基板の梱包体 | |
| JP4940814B2 (ja) | 板状物用トレイ | |
| JP6083106B2 (ja) | 基板保持用枠体の搬送方法 | |
| JP5849471B2 (ja) | 基板保持用枠体及びそれを用いた基板搬送方法 | |
| JP5831200B2 (ja) | 基板保持用枠体を吸着して懸垂する枠体搬送装置における基板保持用枠体の吸着解除方法 | |
| JP4941224B2 (ja) | 板状物用トレイと板状物の積層方法 | |
| JP2007326584A (ja) | 梱包用具、梱包容器、梱包体、ガラス基板の梱包方法および梱包体の開梱方法 | |
| JP6074975B2 (ja) | 基板保持用枠体と基板保持用枠体の搬送方法 | |
| JP6079044B2 (ja) | 枠体搬送装置および枠体搬送装置を用いた枠体搬送方法 | |
| JP4957217B2 (ja) | トレイ開梱梱包装置およびトレイ開梱梱包方法 | |
| JP4858045B2 (ja) | 板状物の受け取り方法および板状物の受け取り装置 | |
| JP5708195B2 (ja) | インナーパレット | |
| JP6011658B2 (ja) | インナーパレット | |
| KR101989322B1 (ko) | 필름을 이송하기 위한 로봇 핸드 | |
| JP4973083B2 (ja) | 板状物用トレイ | |
| WO2022176605A1 (ja) | ガラス板梱包体、及びガラス板梱包体の開梱方法 | |
| JP5429257B2 (ja) | 板状物用トレイと板状物の積層方法 | |
| JP2015193424A (ja) | 基板保持用枠体と薄板基板の梱包体 | |
| JP2008094402A (ja) | 梱包箱体、梱包体、ガラス基板の梱包方法および梱包体の開梱方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20130823 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150727 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150908 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151104 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160405 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160418 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5929227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |