JP5904803B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP5904803B2 JP5904803B2 JP2012012304A JP2012012304A JP5904803B2 JP 5904803 B2 JP5904803 B2 JP 5904803B2 JP 2012012304 A JP2012012304 A JP 2012012304A JP 2012012304 A JP2012012304 A JP 2012012304A JP 5904803 B2 JP5904803 B2 JP 5904803B2
- Authority
- JP
- Japan
- Prior art keywords
- stepping motor
- current value
- sheet material
- motor
- paper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 41
- 239000000463 material Substances 0.000 claims description 41
- 230000032258 transport Effects 0.000 claims description 36
- 239000000123 paper Substances 0.000 description 206
- 238000000034 method Methods 0.000 description 43
- 230000008569 process Effects 0.000 description 29
- 238000010586 diagram Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 239000011111 cardboard Substances 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 108091008695 photoreceptors Proteins 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012840 feeding operation Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000011087 paperboard Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/06—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/06—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers
- B65H5/062—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers between rollers or balls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/02—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors
- B65H7/06—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles by feelers or detectors responsive to presence of faulty articles or incorrect separation or feed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
- B65H2511/21—Angle
- B65H2511/212—Rotary position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2515/00—Physical entities not provided for in groups B65H2511/00 or B65H2513/00
- B65H2515/70—Electrical or magnetic properties, e.g. electric power or current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2553/00—Sensing or detecting means
- B65H2553/51—Encoders, e.g. linear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2555/00—Actuating means
- B65H2555/20—Actuating means angular
- B65H2555/26—Stepper motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2557/00—Means for control not provided for in groups B65H2551/00 - B65H2555/00
- B65H2557/60—Details of processes or procedures
- B65H2557/63—Optimisation, self-adjustment, self-learning processes or procedures, e.g. during start-up
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Stepping Motors (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Handling Of Sheets (AREA)
- Control Or Security For Electrophotography (AREA)
- Delivering By Means Of Belts And Rollers (AREA)
Description
図1は、第1実施形態に係る画像形成装置の概要断面図である。
本実施形態の画像形成装置1は、矢印方向に回転する4色(Y,M,C,K)の感光ドラム1a〜1dを有している。外部より画像信号と共に印刷指示を受けると、画像形成装置1は、感光体(感光ドラム)1a〜1dを1次帯電部2a〜2dで一様に帯電させる。また、露光部3a〜3dで画像信号に応じた露光を行うことにより感光体1a〜1dに静電潜像を形成する。静電潜像は、現像部4a〜4dで現像され、トナー像が形成される。
給紙ステッピングモータM1は最上流のステッピングモータである。搬送ステッピングモータM2は、給紙ステッピングモータM1よりもやや遅れたタイミングで駆動される。給紙時には駆動する必要がないためである。搬送ステッピングモータM2は、図2に示したもののほかにも、その下流側に、図1に示した搬送ステッピングモータM3、M4も存在する。但し、すべて搬送ステッピングモータM2と同じ構成及び動作なので、これらについての説明を省略する。
駆動制御部105は、CPU101からの位置指令信号b1と電流設定値b2とをもとに、搬送ステッピングモータM2に駆動電流b3を供給する。
同様に、駆動制御部105は、電流設定値b2に応じて、搬送ステッピングモータM2に流れる電流が一定電流となるように定電流制御を行う。すなわち、チョッピング制御を行い、搬送ステッピングモータM2に定電流を供給する。
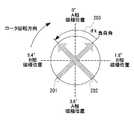
図3は、Step角1.8度のステッピングモータを、A相とB相の2相励磁で駆動した場合の例を表す状態説明図である。横軸はB相磁極位置、縦軸はA相磁極位置である。1Stepが物理角で1.8度なので、2相励磁の場合、7.2度の物理角で360度の電気角となる。図3の例では、ロータが中央右周りの方向に回転制御される。駆動制御部102は、給紙ステッピングモータM1のロータが目標位置201に回転するように、位置指令信号a1に基づいて、モータM1を駆動制御したとする。それに対して、エンコーダ104の回転信号a4によれば、給紙ステッピングモータM1のロータが検出位置202であったとする。この目標位置201に対する検出位置202の遅れ角θkが、負荷角となる。
電流設定処理は、用紙カセット91が開放された場合、画像形成装置1への電源供給が遮断された場合、待機時の省エネモード等によってCPU101への電源供給が遮断された場合に開始される。これら場合には、用紙カセット91に積載された用紙Pが変更された可能性があるためである。そこで、本実施形態では、電源供給時、用紙カセット91の装着時、用紙カセット91から最初に用紙Pを給紙するときに、電流設定処理を行う。
つまり、給紙ステッピングモータM1の負荷角により用紙カセット91に積載された用紙種を確認し、確認した用紙種に応じた各種ステッピングモータM1等の電流設定値を決定することとした。電流設定処理の手順例を図6に示す。
なお、本実施形態では駆動可能な電流の最大値を設定しているが、給紙・搬送可能な用紙Pのうちで最大厚みのものを給紙・搬送させるのに必要となるトルクを得ることができる電流値であればよく、最大値にしなくてもかまわない。プリントジョブがあるかどうかを判断し(S103)、無い場合は待機する(S103:No)。
プリントジョブが有る場合は(S103:Yes)、S102で設定した電流設定最大値(Imax)で給紙ステッピングモータM1を回転させ、用紙カセット91の最上位紙の給紙ローラ81への給紙を開始する(S104)。そして、給紙ローラ81が1枚目を給紙する際に、給紙ステッピングモータM1において負荷角を検出する(S105)。
図8は、給紙ステッピングモータM1と各搬送ステッピングモータとがそれぞれ独立に異なるタイミングで動作し、かつ、同じスペックであることを前提とした電流設定値の例を示している。
搬送ステッピングモータM2〜M4は、給紙ステッピングモータM1よりも遅れたタイミングで駆動される。そのため、直ちに変更後の電流設定値で搬送ステッピングモータM2〜M4を駆動することにより、1枚目の用紙Pを変更後の電流設定値の駆動電流で搬送することができる。
上記のようにして設定した電流設定値の駆動電流を各ステッピングモータM1〜M4に供給して用紙Pの給紙及び搬送を行っている際に、用紙センサ110において、用紙Pの通過が一定時間以上検知されなかったとする。これは、予定されている用紙Pよりも厚い異用紙が混載している等、給紙ステッピングモータM1において給紙不良が発生した場合の症状である。この場合は、給紙不良対応処理、具体的には電流設定値を変更する処理が必要となる。
まず、各ステッピングモータM1〜M4のすべての電流設定値を最大値、すなわち電流設定最大値(Imax)に設定変更する(S202)。なお、本実施形態では駆動可能な電流の最大値を設定しているが、給紙不良対応処理に想定されているトルクを得ることができる電流値であればよく、最大値にしなくてもかまわない。
そして、所定時間待つ(S203)。画像形成装置1は、給紙不良が発生した用紙Pに対するプリント動作をキャンセルし、その次の用紙Pの給紙タイミングで給紙を再開する(S204)。そして、給紙を再開した最初の1枚目において、再度、給紙ステッピングモータM1を用いて、脱調余裕度、すなわち負荷角を上記のようにして確認する(S205)。
これにより、用紙カセット91の用紙Pの中に他の用紙よりも厚い厚紙等が混入していた場合であっても、プリント動作を継続することが可能となる。
なお、この実施形態では、負荷角の検知を給紙ステッピングモータM1で行い、検知した負荷角をもとに、搬送ステッピングモータM2〜M4の電流設定値を決定する構成で説明したが、この限りでない。例えば、搬送ステッピングモータM2〜M4のいずれかで負荷角を検知し、給紙ステッピングモータM1を含む残部のステッピングモータの電流設定値を決定することもできる。
図11は、本発明の第2実施形態に係る画像形成装置2の概要断面図である。
第1実施形態の画像形成装置1と異なるのは、複数の用紙カセットを装着可能である点である。その分、給紙ローラ、搬送ローラ、これらを駆動するステッピングモータ、及び各種センサも多くなっている。その他は、図1に示した画像形成装置1と共通なので、図1に示した構成部品と同一ないし同機能のものについては、同一符号を付して、その説明を省略する。
さらに、カセット92の開閉を検知するカセット開閉検知センサ108、用紙センサ111が付加される。
図2に示した構成部品と同一ないし同機能の構成部品については、同一符号を付して、その説明を省略する。
処理開始の契機は、第1実施形態のときと同じであり、電源ON、用紙カセット91,92が装着されたときに、電流設定の処理が開始する(S301)。電源ONのときは、給紙ステッピングモータM1、M5の両負荷角をリセットする。用紙カセット91のときは給紙ステッピングモータM1の負荷角をリセットし、用紙カセット92のときは給紙ステッピングモータM5の負荷角をリセットする(S302)。
プリントジョブが有るかどうかを判断し(S303)、無い場合は待機する(S303:NO)。プリントジョブが有る場合は給紙箇所を判別する(S304)。
給紙箇所が用紙カセット91の場合(S304:YES)、メモリ106に給紙ステッピングモータM1の負荷角の情報が有るかどうかを判断する(S305)。無ければ(S305:NO)、給紙ステッピングモータM1の設定電流を電流設定最大値(Imax)に設定する(S306)。
このように、第2実施形態においても、用紙Pを給紙搬送するのに最適な電流(脱調しない範囲で最小コスト)で駆動されることになり、脱調することなく、最小の消費電力で給紙・搬送を行うことができる。
図1及び図11に示した画像形成装置1,2のうち、給紙系及び搬送系の部分だけを独立に実施することができる。すなわち、制御系統を、感光ドラム1a〜1d等の画像形成機能の部分と切り離して、独立した装置、例えば給紙装置として実施することができる。
本発明は、また、紙以外のシート材、例えば薄膜樹脂を複数のモータを駆動源として移動させる際のシート材の移動制御装置としても実施することができる。
Claims (13)
- シート材を収容するカセットと、
前記カセットの開閉を検知する検知部と、
前記カセットに収容されたシートを搬送経路に沿って搬送する第1ローラと、
前記搬送経路において、前記第1ローラの下流側に配置されて前記シート材を搬送する第2ローラと、
前記第1ローラを駆動する第1ステッピングモータと、
前記第2ローラを駆動する第2ステッピングモータと、
前記第1ステッピングモータおよび前記第2ステッピングモータの駆動を制御する制御手段と、
前記第1ステッピングモータの負荷角を検出する検出手段と、
n(nは1以上の自然数)枚目のシート材の搬送にかかる前記第1ステッピングモータの電流値として所定電流値を設定し、前記n枚目のシート材の搬送において前記検出手段が検出した前記第1ステッピングモータの負荷角に応じて、前記n枚目より後のシート材の搬送にかかる前記第1ステッピングモータの電流値として第1電流値を決定し、および前記n枚目以降のシート材の搬送にかかる前記第2ステッピングモータの電流値として第2電流値を決定する決定手段と、
前記決定手段により決定された前記第1及び第2電流値を記憶する記憶部と、を有し、
前記検知部が前記カセットが開いたことを検知した場合、前記決定手段は、前記第1及び第2電流値の決定を実行し、
前記決定を実行しない場合は、前記制御手段は、前記記憶部に格納されている前記第1及び第2電流値を用いて前記第1ステッピングモータおよび前記第2ステッピングモータの駆動を制御することを特徴とする画像形成装置。 - 前記決定手段は、装置電源の遮断又は休止後の復帰の後にプリントジョブを実行するときに、第1シート材を搬送する前記第1ステッピングモータの電流値を前記所定電流値に設定し、かつ、前記第1シート材の搬送で前記検出手段により検出された前記第1ステッピングモータの負荷角に従って、第2シート材及びその後のシート材を搬送するための前記第1ステッピングモータの電流値を決定し、かつ、前記第1シート材及びその後のシート材を搬送するための前記第2ステッピングモータの電流値を決定する、
請求項1に記載の画像形成装置。 - 前記第1ステッピングモータは、前記シート材が積載された前記カセットから前記シート材を抽出する駆動源として配備されるステッピングモータである、
請求項1又は2に記載の画像形成装置。 - 前記所定電流値は、最も大きな負荷を要する種類のシート材を搬送する上で必要な電流値である、
請求項1乃至3のいずれか一項に記載の画像形成装置。 - 前記第1ステッピングモータのロータ位置を検出するエンコーダを備えており、
前記検出手段は、前記エンコーダで検出されたロータの検出位置と当該ロータの目標位置との比較により前記負荷角を検出し、前記ロータは、前記所定電流値により生成される設定トルクを生成するよう構成されている、
請求項1乃至4のいずれか一項に記載の画像形成装置。 - 前記第1ステッピングモータを駆動する際の電流波形を検出する電流検出回路を備えており、
前記検出手段は、前記電流波形から当該第1ステッピングモータのロータ遅れ角を算出し、算出したロータ遅れ角をもとに前記負荷角を検出する、
請求項1乃至5のいずれか一項に記載の画像形成装置。 - シート材を収容するカセットと、
前記カセットの開閉を検知する検知部と、
前記カセットに収容されたシート搬送経路に沿って搬送するローラと、
前記ローラを駆動するモータと、
前記モータの駆動を制御する制御手段と、
前記モータの負荷角を検出する検出手段と、
n(nは1以上の自然数)枚目のシート材の搬送にかかる前記モータの電流値として所定電流値を設定し、前記n枚目のシート材の搬送において前記検出手段が検出した前記モータの負荷角に応じて、前記n枚目より後のシート材の搬送にかかる前記モータの電流値として電流値を決定する決定手段と、
前記決定手段により決定された前記電流値を記憶する記憶部と、を有し、
前記検知部が前記カセットが開いたことを検知した場合、前記決定手段は、前記電流値の決定を実行し、
前記決定を実行しない場合は、前記制御手段は、前記記憶部に格納されている前記電流値を用いて前記モータの駆動を制御することを特徴とする画像形成装置。 - 前記決定手段は、前記n枚目のシート材の搬送にかかる前記モータの電流値に代えて、前記n枚のシート材の搬送において前記検出手段が検出した前記モータの負荷角に応じてm(m>n)枚目までのシート材の搬送にかかる前記モータの電流値を前記所定電流値に設定し、m枚までのシート材の搬送の際の前記モータの負荷角の統計値に応じて、m+1枚以降の当該モータの電流値を設定することを特徴とする、
請求項7に記載の画像形成装置。 - 前記決定手段は、装置電源の遮断又は休止後の復帰の後にプリントジョブを実行するときに、第1シート材を搬送する前記モータの電流値を前記所定電流値に設定し、かつ、前記第1シート材の搬送で前記検出手段により検出された前記モータの負荷角に従って、第2シート材及びその後のシート材を搬送するための前記モータの電流値を決定する、
請求項7又は8に記載の画像形成装置。 - 前記モータは、前記シート材が積載された前記カセットから前記シート材を抽出する駆動源として配備されるステッピングモータである、
請求項7乃至9のいずれか一項に記載の画像形成装置。 - 前記所定電流値は、最も大きな負荷を要する種類のシート材を搬送する上で必要な電流値である、
請求項7乃至10のいずれか一項に記載の画像形成装置。 - 前記モータのロータ位置を検出するエンコーダを備えており、
前記検出手段は、前記エンコーダで検出されたロータの検出位置と当該ロータの目標位置との比較により前記負荷角を検出し、前記ロータは、前記所定電流値により生成される設定トルクを生成するよう構成されている、
請求項7乃至11のいずれか一項に記載の画像形成装置。 - 前記モータを駆動する際の電流波形を検出する電流検出回路を備えており、
前記検出手段は、前記電流波形から当該モータのロータ遅れ角を算出し、算出したロータ遅れ角をもとに前記負荷角を検出する、
請求項7乃至12のいずれか一項に記載の画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012304A JP5904803B2 (ja) | 2012-01-24 | 2012-01-24 | 画像形成装置 |
| US13/747,303 US9233809B2 (en) | 2012-01-24 | 2013-01-22 | Image forming apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012012304A JP5904803B2 (ja) | 2012-01-24 | 2012-01-24 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013151090A JP2013151090A (ja) | 2013-08-08 |
| JP2013151090A5 JP2013151090A5 (ja) | 2015-05-07 |
| JP5904803B2 true JP5904803B2 (ja) | 2016-04-20 |
Family
ID=48796586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012012304A Expired - Fee Related JP5904803B2 (ja) | 2012-01-24 | 2012-01-24 | 画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9233809B2 (ja) |
| JP (1) | JP5904803B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6743647B2 (ja) * | 2016-10-25 | 2020-08-19 | コニカミノルタ株式会社 | 画像形成装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08295427A (ja) * | 1995-04-27 | 1996-11-12 | Sharp Corp | シート給紙装置 |
| JP2001322734A (ja) | 2000-05-16 | 2001-11-20 | Canon Inc | 画像形成装置、ステッピングモータ制御方法及び記憶媒体 |
| JP2002082496A (ja) * | 2000-09-06 | 2002-03-22 | Canon Inc | 画像形成装置 |
| JP2003306248A (ja) * | 2002-04-16 | 2003-10-28 | Sharp Corp | 原稿搬送装置および画像読取装置 |
| JP4227546B2 (ja) * | 2004-03-19 | 2009-02-18 | キヤノン株式会社 | シート給送装置 |
| EP1615330B1 (en) * | 2004-06-30 | 2010-03-24 | Askoll Holding S.r.l. | Method for controlling the load angle of a synchronous electric motor, in particular for fans |
| JP4383991B2 (ja) * | 2004-09-17 | 2009-12-16 | キヤノン株式会社 | モータ制御装置 |
| JP2006290536A (ja) * | 2005-04-11 | 2006-10-26 | Kyocera Mita Corp | 画像形成装置 |
| JP4713973B2 (ja) * | 2005-07-28 | 2011-06-29 | オリエンタルモーター株式会社 | ステッピングモータの駆動方法および駆動装置 |
| JP2007144666A (ja) * | 2005-11-24 | 2007-06-14 | Fuji Xerox Co Ltd | 液滴吐出装置 |
| US7560893B2 (en) * | 2007-06-12 | 2009-07-14 | Xerox Corporation | Dual mode stepper motor |
| JP2009273334A (ja) * | 2008-05-12 | 2009-11-19 | Seiko Epson Corp | ステッピングモータの制御装置、画像読取装置、ステッピングモータの制御方法および制御プログラム |
| JP4930613B2 (ja) | 2010-03-18 | 2012-05-16 | コニカミノルタビジネステクノロジーズ株式会社 | 画像形成装置および画像形成装置におけるステッピングモータの制御方法 |
| GB2489434A (en) * | 2011-03-25 | 2012-10-03 | Technelec Ltd | Controlling an electrical machine with an observer |
-
2012
- 2012-01-24 JP JP2012012304A patent/JP5904803B2/ja not_active Expired - Fee Related
-
2013
- 2013-01-22 US US13/747,303 patent/US9233809B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9233809B2 (en) | 2016-01-12 |
| JP2013151090A (ja) | 2013-08-08 |
| US20130187332A1 (en) | 2013-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5546288B2 (ja) | シート厚検出装置、画像形成装置およびシート給送装置 | |
| JP5062404B2 (ja) | 画像形成装置 | |
| JP5963452B2 (ja) | 画像形成装置 | |
| JP5235475B2 (ja) | 画像形成装置 | |
| JP5062403B2 (ja) | 画像形成装置および画像形成システム | |
| JP6388394B2 (ja) | 画像形成装置 | |
| US8960671B2 (en) | Sheet-conveying device halting brushed motor in different methods | |
| JP2016027955A (ja) | 画像形成装置 | |
| JP5904803B2 (ja) | 画像形成装置 | |
| JP2013151091A (ja) | 画像形成装置 | |
| JP4859235B2 (ja) | 画像形成装置及び画像形成装置における残留シート検出方法 | |
| JP2010264628A (ja) | 画像形成装置 | |
| JP5263564B2 (ja) | 画像形成装置およびプログラム | |
| JP2009042638A (ja) | 画像形成装置及びその転写材除湿方法 | |
| JP2011145472A (ja) | 画像形成装置、画像形成装置の制御方法、及び画像形成装置の制御プログラム | |
| JP3808826B2 (ja) | モータ制御装置 | |
| JP6740984B2 (ja) | モーター駆動装置、画像形成装置、モーターの駆動方法 | |
| JP3619216B2 (ja) | 画像形成装置 | |
| JP2004238157A (ja) | 画像形成装置 | |
| JP5210724B2 (ja) | 画像形成装置 | |
| JP2019073363A (ja) | シート搬送装置、シート搬送装置の制御方法、そのプログラム及び画像形成装置 | |
| JP3259625B2 (ja) | 用紙搬送装置 | |
| CN114545748A (zh) | 输送装置和图像形成装置 | |
| JP2018059981A (ja) | 画像形成装置、画像形成方法 | |
| JP2019123576A (ja) | シート給送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150318 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160216 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160315 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5904803 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |