以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
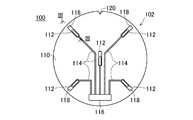
図1は、温度検出装置の全体斜視図である。図2は、温度検出装置の平面図である。図3は、図2のIII−III線に沿った縦断面図である。
温度検出装置100は、複数の基板を貼り合わせて重ね合わせ基板を製造する基板貼り合わせ装置の温度を検出する。特に、温度検出装置100は、基板貼り合わせ装置の加熱加圧装置において、一対の基板を加熱している状態の温度を検出することを主な目的とする。
図1から図3に示すように、温度検出装置100は、一対の温度検出部102、102と、断熱部材104とを有する。温度検出装置100は、例えば一対の基板を重ね合わせた重ね合わせ基板と略同じ厚みを有する。
一方の温度検出部102は、断熱部材104を挟み、他方の温度検出部102の反対側に配置されている。温度検出部102、102と断熱部材104は、一体的に形成されている。尚、温度検出部102、102と断熱部材104とを分解可能に構成してもよい。温度検出部102は、温度検出基板110と、5個の温度センサ112と、配線114と、検出制御部116とを有する。
温度検出基板110は、シリコン、ゲルマニウム等の半導体、GaAs及びGaN等の化合物半導体、または、絶縁体からなる。尚、温度検出基板110は、貼り合わされる基板と同じ材料、または、熱伝導率等の特性が類似している材料により構成することが好ましい。温度検出基板110は、略円形状に形成されている。温度検出基板110の一面には、温度センサ112を保持する複数の保持凹部118が形成されている。温度検出基板110の外周部には、位置検出用のマークの一例であるノッチ120が形成されている。ノッチ120によって、温度検出装置100の中心周りにおける温度検出部102の回転位置が検出される。
温度センサ112の一例は、シース型熱電対である。熱電対は、異種金属間に発生する熱起電力の現象であるゼーベック効果を利用している。シース型熱電対は、ステンレスシース管の内部に一対の熱電対素線を配置して、シース管中に無機絶縁物を高圧で充填している。熱電対先端の感温部がステンレスで覆われているので機械的強度に優れており、加圧される温度検出装置100にとって好ましい。尚、温度センサ112として、金属の抵抗値と温度との関係を利用した測温抵抗型を適用してもよい。
温度センサ112は、温度検出基板110の保持凹部118に設けられている。温度センサ112の一面は、断熱部材104と反対側の温度検出基板110の面と同じ高さまたは少し高い。尚、温度センサ112の一面を、温度検出基板110の当該面よりも高くする場合、温度検出基板110から突出する温度センサ112の領域に弾性を持たせることが好ましい。4個の温度センサ112は、温度検出基板110の中心の周りに90°間隔で配置されている。即ち、4個の温度センサ112は、温度検出基板110の中心の周りに等間隔で配置されている。残りの温度センサ112は、温度検出基板110の中心に配置されている。尚、温度センサ112の個数及び配置は、適宜変更してよい。各温度センサ112は、配線114によって、検出制御部116に接続されている。これにより、各温度センサ112は、配置されている領域の温度に対応した電気信号を検出制御部116へと出力する。
配線114は、リフトオフ法、フォトリソグラフィー、エッチング等の半導体製造技術によって、温度検出基板110の上面に形成されている。配線114は、耐熱性に優れたシリコン被膜加工がされている。
検出制御部116は、各温度センサ112から温度情報を取得する。検出制御部116は、取得した温度情報と、各温度センサ112を特定するセンサIDとを関連付けて、無線通信により外部機器へと出力する。
断熱部材104は、温度検出基板110よりも熱伝導率の低い材料からなる。例えば、断熱部材104は、マコール(登録商標)からなる。尚、断熱部材104は、熱伝導率の低い酸化シリコン等の他の断熱材料によって構成してもよい。断熱部材104は、温度検出部102と温度検出部102との間に配置されている。これにより、上方から加熱された場合、断熱部材104は、その熱が下方の温度検出部102に伝達されることを抑制する。逆に、下方から加熱された場合も同様である。
図4は、温度検出装置を保持する一対の基板ホルダを説明する分解斜視図である。図4に示すように、温度検出装置100は、下基板ホルダ202及び上基板ホルダ204によって挟持される。
下基板ホルダ202は、温度検出装置100の下方に配置される。下基板ホルダ202は、下ホルダ本体210と、6個の吸着子212とを有する。
下ホルダ本体210は、セラミックス、金属等の高剛性材料により形成されている。下ホルダ本体210は、温度検出装置100よりも直径が大きい円板状に形成されている。下ホルダ本体210の中心部には、温度検出装置100と直径が略等しい円形状の凸部が形成されている。凸部の上面が、温度検出装置100を保持する保持面214として機能する。上述したように温度検出装置100の温度センサ112の一面は、温度検出基板110の一面と略同じ高さである。従って、温度センサ112の一面は、保持面214と接触するので、温度センサ112は、下基板ホルダ202を介して伝達される熱を効率よく受けることができる。
下ホルダ本体210の保持面214には、複数の挿通孔218が形成されている。挿通孔218は、保持面214を上下方向に貫通する。挿通孔218には、基板貼り合わせ装置等に設けられたプッシュアップピンが挿通される。これにより、下基板ホルダ202から温度検出装置100が取り外される。また、保持面214の下部には、電極プレートが埋設されている。電極プレートは、温度検出装置100を静電吸着により保持する。電極プレートには、保持面214の下面側に埋設された電力供給端子を介して電力が供給される。
吸着子212は、永久磁石により形成されている。吸着子212は、温度検出装置100を保持する保持面において、保持した温度検出装置100よりも外周領域に配される。6個の吸着子212は、2個を一組として、下ホルダ本体210の中心の周りに120度間隔で配置されている。尚、吸着子212の個数は、6個に限定されない。
上基板ホルダ204は、温度検出装置100の上方に配置される。上基板ホルダ204は、上ホルダ本体220と、6個の被吸着子222とを有する。
上ホルダ本体220は、下ホルダ本体210と略同形状であって、同じ材料によって形成されている。上ホルダ本体220には、下ホルダ本体210の保持面214及び挿通孔218と同様の機能を有する保持面224及び挿通孔228が形成されている。
被吸着子222は、鉄等の強磁性体により形成されている。6個の被吸着子222は、上ホルダ本体220の外周部であって、下基板ホルダ202の吸着子212と対向する位置に配置されている。被吸着子222が吸着子212によって吸着されることにより、温度検出装置100が下基板ホルダ202及び上基板ホルダ204によって挟持される。
図5は、基板貼り合わせ装置の全体構成図である。基板貼り合わせ装置10は、2枚の基板90、90を貼り合わせて、重ね合わせ基板92を製造する。尚、基板貼り合わせ装置10は、3枚以上の基板90を貼り合わせて、重ね合わせ基板92を製造してもよい。
図5に示すように、基板貼り合わせ装置10は、筐体12と、常温部14と、高温部16と、制御部18とを備える。筐体12は、常温部14及び高温部16を囲むように形成されている。
常温部14は、複数の基板カセット20、20、20と、基板ホルダラック22と、ロボットアーム24と、プリアライナ26と、アライナ28と、ロボットアーム30とを有する。ロボットアーム24、30は、搬送部の一例である。
基板カセット20は、温度検出装置100、及び、基板貼り合わせ装置10において結合されて貼り合わされる基板90を収容する。また、基板カセット20は、基板貼り合わせ装置10において結合されて貼り合わされた重ね合わせ基板92を収容する。基板カセット20は、筐体12の外面に脱着可能に装着されている。これにより、複数の基板90を基板貼り合わせ装置10に一括して装填できる。また、複数組の重ね合わせ基板92を一括して回収できる。基板貼り合わせ装置10によって貼り合わされる基板90は、単体のシリコンウエハ、化合物半導体ウエハ、ガラス基板等の他、それらに素子、回路、端子等が形成されていてもよい。また、装填された基板90が、既に複数のウエハが積層された重ね合わせ基板92であってもよい。
基板ホルダラック22は、一対の基板90が重ね合わされた重ね合わせ基板92を上下方向から保持する下基板ホルダ202及び上基板ホルダ204を収容する。尚、重ね合わせ基板92を保持する下基板ホルダ202及び上基板ホルダ204は、温度検出装置100を保持する下基板ホルダ202及び上基板ホルダ204と同じものとして説明する。
ロボットアーム24は、筐体12の内部であって、基板カセット20の近傍に配置されている。ロボットアーム24は、基板カセット20に装填されている温度検出装置100及び基板90をプリアライナ26に搬送する。ロボットアーム24は、プリアライナ26に搬送した温度検出装置100及び基板90を、後述するアライナ28の移動ステージ38に載置された下基板ホルダ202及び上基板ホルダ204へと搬送する。ロボットアーム24は、温度検出後の温度検出装置100、及び、結合されて移動ステージ38まで搬送された重ね合わせ基板92を基板カセット20の何れかに搬送する。
プリアライナ26は、筐体12の内部であって、ロボットアーム24の近傍に配置されている。プリアライナ26は、アライナ28に温度検出装置100または基板90を装填する場合に、高精度であるがゆえに、狭いアライナ28の調整範囲に温度検出装置100または基板90が装填されるように、温度検出装置100または基板90の位置を仮合わせする。これにより、アライナ28における温度検出装置100及び基板90の位置決めが、迅速且つ正確にできる。
アライナ28は、ロボットアーム24とロボットアーム30との間に配置されている。アライナ28は、枠体34と、固定ステージ36と、移動ステージ38と、一対のシャッタ40及びシャッタ42と、位置検出部43とを有する。
枠体34は、固定ステージ36及び移動ステージ38を囲むように形成されている。枠体34の基板カセット20側の面と、高温部16側の面は、温度検出装置100及び基板90等を搬入及び搬出可能に、開口されている。
固定ステージ36は、枠体34の内側であって、基板カセット20の近傍に固定されている。固定ステージ36の下面は、基板90を保持した状態で、ロボットアーム30により移動ステージ38から搬送される上基板ホルダ204を真空吸着する。
移動ステージ38は、枠体34の内側であって、高温部16側に配置されている。移動ステージ38の上面は、下基板ホルダ202及び上基板ホルダ204を真空吸着する。移動ステージ38は、枠体34の内部を水平方向及び鉛直方向に移動する。これにより、移動ステージ38が移動することによって、上基板ホルダ204を介して固定ステージ36に保持された基板90と、下基板ホルダ202を介して移動ステージ38に保持された基板90とが位置合わせされ、重ね合わされる。尚、基板90と基板90は、接着剤、または、プラズマ等によって仮接合してもよい。また、移動ステージ38が移動することによって、上基板ホルダ204と、下基板ホルダ202を介して移動ステージ38に保持された温度検出装置100とが位置合わせされ、重ね合わされる。
シャッタ40は、枠体34の基板カセット20側の開口を開閉する。シャッタ42は、枠体34の高温部16側の開口を開閉する。枠体34及びシャッタ40、42に囲まれた領域は、空気調整機等に連通されて、温度管理される。これにより、基板90と基板90との位置合わせ、及び、温度検出装置100と上基板ホルダ204との位置合わせの精度が向上する。位置検出部43は、温度検出装置100の位置を検出するためのノッチ120の画像を撮像する。
ロボットアーム30は、筐体12の内部であって、高温部16とアライナ28との間に配置されている。ロボットアーム30は、基板ホルダラック22に収容されている下基板ホルダ202及び上基板ホルダ204を移動ステージ38へと搬送する。移動ステージ38に載置された下基板ホルダ202及び上基板ホルダ204は、ロボットアーム24によってプリアライナ26から搬送された温度検出装置100または基板90を静電吸着により保持する。ロボットアーム30は、移動ステージ38上に載置され、基板90を保持する上基板ホルダ204を、裏返して固定ステージ36へと搬送する。固定ステージ36の下面は、ロボットアーム30によって搬送された上基板ホルダ204を真空吸着する。
ロボットアーム30は、移動ステージ38によって位置合わせされた温度検出装置100または一対の基板90を保持する下基板ホルダ202及び上基板ホルダ204を真空吸着して、高温部16へと搬送する。ロボットアーム30は、高温部16において、結合されて貼り合わされた重ね合わせ基板92または温度検出装置100を高温部16から移動ステージ38へと搬送する。
高温部16は、基板貼り合わせ装置10の貼り合わせ工程において、高温且つ真空状態に設定される。高温部16は、断熱壁46と、エアロック室48と、一対のシャッタ50及びシャッタ52と、ロボットアーム54と、5個の収容室55と、5個の加熱加圧装置56とを備える。ロボットアーム54は、搬送部の一例である。尚、加熱加圧装置56の個数は、5個に限定されるものではなく、適宜変更してもよい。
断熱壁46は、高温部16を包囲する。これにより、断熱壁46は、高温部16の高い内部温度を維持するとともに、高温部16から外部への熱輻射を遮断する。この結果、断熱壁46は、高温部16の熱が常温部14に及ぼす影響を低減する。また、断熱壁46は、高温部16と外部との気体の流れを遮断する。これにより、断熱壁46は、高温部16の真空状態を維持する。
エアロック室48は、常温部14と高温部16とを連結する。エアロック室48の常温部14側及び高温部16側は、下基板ホルダ202及び上基板ホルダ204に保持された温度検出装置100または一対の基板90を含む重ね合わせ基板92を搬送可能に開口されている。
シャッタ50は、エアロック室48の常温部14側の開口を開閉する。シャッタ50が開状態になると、エアロック室48が常温部14と連通される。これにより、エアロック室48は、常温部14と略同じ気圧となる。この状態で、ロボットアーム30は、エアロック室48とアライナ28との間で、温度検出装置100または重ね合わせ基板92を搬送する。
シャッタ52は、エアロック室48の高温部16側の開口を開閉する。シャッタ52が開状態になると、エアロック室48は、高温部16と連通される。これにより、エアロック室48は、高温部16と略同じ気圧となる。尚、貼り合わせ工程において、シャッタ50及びシャッタ52の両方が開状態になることはない。
ロボットアーム54は、シャッタ52が開状態において、ロボットアーム30によりエアロック室48に搬入された温度検出装置100または重ね合わせ基板92を、下基板ホルダ202及び上基板ホルダ204とともに、何れかの加熱加圧装置56へと搬入する。
収容室55は、中空状に形成されている。収容室55は、加熱加圧装置56の主要部を収容して包囲する。収容室55は、重ね合わせ基板92を搬入及び搬出するために、開閉可能な開口部を有する。収容室55は、重ね合わせ基板92が搬入された後、真空状態にするために密閉される。
加熱加圧装置56は、加熱装置の一例である。加熱加圧装置56は、断熱壁46の内部に配置されている。3個の加熱加圧装置56は、断熱壁46の中心の周りに略等角度間隔で配置されている。加熱加圧装置56は、ロボットアーム54によってエアロック室48から搬入された重ね合わせ基板92を保持する。加熱加圧装置56は、結合温度状態の重ね合わせ基板92を加圧する。そして、加熱加圧装置56は、重ね合わせ基板92の基板90が結合可能な結合温度まで、搬入された重ね合わせ基板92を昇温させる。これにより、加熱加圧装置56は、重ね合わせ基板92を結合して貼り合わせる。
ロボットアーム54は、結合されて貼り合わされた重ね合わせ基板92及び温度検出装置100を加熱加圧装置56からエアロック室48へと搬送する。
制御部18は、基板貼り合わせ装置10の全体の動作を制御する。制御部18は、基板貼り合わせ装置10の電源投入、各種設定等をする場合に、ユーザが外部から操作する操作部を有する。また、制御部18は、温度検出装置100から入力された温度に関する温度情報を解析する。制御部18は、その温度情報に基づいて、加熱加圧装置56の加熱温度、加圧力、冷却温度を制御する。
図6は、加熱加圧装置の全体構造を示す正面図である。図6に示すように、加熱加圧装置56は、床面側に配置される下部モジュール60と、天井側に配置される上部モジュール62とを有する。
下部モジュール60は、昇降部66と、下部圧力制御モジュール68と、下部加熱モジュール70と、下部トッププレート72とを有する。
昇降部66は、温度検出装置100または重ね合わせ基板92とともに、下部圧力制御モジュール68、下部加熱モジュール70及び下部トッププレート72を昇降させる。また、昇降部66は、上部モジュール62の下面に上基板ホルダ204が接触した後、温度検出装置100または重ね合わせ基板92を加圧する。尚、図6において、重ね合わせ基板92は、温度検出装置100と同じ位置に配置される。
下部圧力制御モジュール68は、昇降部66の上面に配置されている。下部圧力制御モジュール68は、昇降部66が温度検出装置100または重ね合わせ基板92に作用させる圧力を水平面内で制御する。例えば、下部圧力制御モジュール68は、上面を平面にしたり、上面の中央部を凸状に変形させたり、上面の周縁部を凸状に変形させることにより、水平面内での圧力を制御する。昇降部66及び下部圧力制御モジュール68が加圧部の一例である。
下部加熱モジュール70は、下部圧力制御モジュール68の上部に配置されている。下部加熱モジュール70は、複数の加熱部74、及び、冷却部の一例である冷却管76を有する。各加熱部74は、電熱ヒータを有する。加熱部74は、それぞれ独立して温度を制御可能に構成されている。複数の加熱部74は、水平面内において、間隔を開けて配置されている。冷却管76には、水等の冷却用の流体が流される。
下部トッププレート72は、下部加熱モジュール70の上面に配置されている。下部トッププレート72は、下基板ホルダ202及び上基板ホルダ204よりも直径の大きい円板状に形成されている。下部トッププレート72の上面には、下基板ホルダ202及び上基板ホルダ204に保持された重ね合わせ基板92または温度検出装置100が載置される。
上部モジュール62は、複数の加熱部84、及び、冷却部の一例である冷却管86を含む上部加熱モジュール80と、上部トッププレート82とを有する。上部加熱モジュール80は下部加熱モジュール70と上下が逆である以外、略同様の構成であり、上部トッププレート82は下部トッププレート72と略同様の構成である。
図7は、基板貼り合わせ装置の動作を説明するフローチャートである。図7に示すように、基板貼り合わせ装置10では、温度検出装置100が加熱加圧装置56の温度を検出する温度検出処理が実行される(S10)。その後、温度検出装置100によって検出された温度に基づいて、複数対の加熱部74、84により重ね合わせ基板92を両面から加熱しつつ、昇降部66によって加圧することにより、重ね合わせ基板92の貼り合わせ処理が実行される(S20)。尚、温度検出処理は、複数回の貼り合わせ処理に対して定期的に実行してもよく、貼り合わされた重ね合わせ基板92に異常が検出された場合に実行してもよい。更に、最初の基板貼り合わせ装置10を起動するときに実行してもよい。
図8は、温度検出処理を説明するフローチャートである。図8に示すように、温度検出処理S10では、温度検出装置100を加熱加圧装置56に設置する(S100)。温度検出装置100の設置方法の一例として、まず、ロボットアーム24が、基板カセット20から温度検出装置100をプリアライナ26へと搬送する。ロボットアーム30が、基板ホルダラック22から下基板ホルダ202を移動ステージ38へと搬送する。移動ステージ38は、下基板ホルダ202を真空吸着する。
次に、ロボットアーム24が、プリアライナ26から温度検出装置100を搬送して、下基板ホルダ202の上面に載置する。下基板ホルダ202は、温度検出装置100を静電吸着する。ロボットアーム30が、基板ホルダラック22から上基板ホルダ204を固定ステージ36へと搬送する。固定ステージ36は、搬送された上基板ホルダ204を真空吸着する。シャッタ40、42が閉状態となった後、移動ステージ38が移動することにより、下基板ホルダ202及び温度検出装置100が固定ステージ36に保持された上基板ホルダ204と位置合わせされる。ここでの、位置合わせは、位置検出部43によりノッチ120を撮像及び検出することにより実行される。
次に、移動ステージ38は、下基板ホルダ202及び温度検出装置100とともに上昇する。これにより、下基板ホルダ202の吸着子212が、上基板ホルダ204の被吸着子222に吸着して、温度検出装置100が下基板ホルダ202及び上基板ホルダ204によって挟持される。固定ステージ36が上基板ホルダ204の真空吸着を解除した後、移動ステージ38が、下基板ホルダ202、温度検出装置100及び上基板ホルダ204を、ロボットアーム30が把持可能な位置まで移動させる。ロボットアーム30は、下基板ホルダ202、温度検出装置100及び上基板ホルダ204をエアロック室48へと搬送する。この後、図6に示すように、ロボットアーム54が、下基板ホルダ202、温度検出装置100及び上基板ホルダ204を加熱加圧装置56の下部トッププレート72の上面へと載置する。
図9は、温度検出装置が加熱加圧装置に設置された状態の断面図である。次に、加熱加圧装置56の周囲を真空状態にした後、昇降部66が、温度検出装置100とともに下基板ホルダ202及び上基板ホルダ204を上昇させる。この後、図9に示すように、上基板ホルダ204の上面が上部トッププレート82の下面と接する。これにより、加熱部74と加熱部84との間であって、重ね合わせ基板92が配置される位置に断熱部材104を含む温度検出処理が設置されるとともに、温度検出部102、102が、断熱部材104と加熱部74または加熱部84との間に配置される。この結果、温度検出装置100の設置が終了する。
この後、制御部18が、電力供給部を制御して各加熱部74、84に電力を供給する。これにより、複数対の加熱部74、84が放熱して、両側から断熱部材104を含む温度検出装置100の加熱を開始する。この後、昇降部66は、温度検出装置100の加圧を開始する尚、温度検出処理では、貼り合わせ処理において加熱する温度及び加圧する圧力と同じ温度及び同じ圧力に設定することが好ましい。設定される温度の一例は、200〜300℃まで昇温させた後、維持する。(S102)。
温度検出部102、102及び断熱部材104が、真空中で、複数対の加熱部74、84によって放熱された状態で、温度検出部102の温度センサ112は、温度を検出して、検出制御部116へと出力する(S104)。検出制御部116は、検出周期毎に、無線通信によって、各温度センサ112のセンサIDと関連付けて、検出した温度を制御部18へと出力する。検出周期の一例は、数秒または数分である。ステップS104が検出段階の一例である。制御部18では、予め記憶部に記憶されている温度検出部102内での各温度センサ112の位置、アライナ28で検出されたノッチ120の位置に基づいて、温度を検出している状態での加熱部74、84に対する温度センサ112の相対位置を算出する。そして、制御部18は、検出された温度と加熱加圧装置56内の検出位置とを関連付けて記憶する。
制御部18は、検出用の加熱時間が経過すると、加熱部74、84への電力供給を停止するとともに、昇降部66が温度検出装置100を下降させる。これにより、温度検出装置100の加熱加圧が終了する(S106)。検出用の加熱時間は、検出用に別途設定してもよく、重ね合わせ基板92の貼り合わせに必要な時間と同じ時間にしてもよい。検出用に加熱時間を別途設定する場合、温度を一定に維持する時間を貼り合わせ時間より短縮してもよい。
次に、温度検出装置100が、予め定められた検出位置で温度を検出していない場合、制御部18は温度の検出が終了していないと判断して(S108:No)、複数対の加熱部74、84に対する温度センサ112の相対位置を変更する(S110)。例えば、温度センサ112の位置は、温度検出装置100を移動ステージ38へと搬送して、移動ステージ38を温度検出装置100とともに回転させた後、温度検出装置100を加熱加圧装置56へと搬送することにより変更する。また、下部トッププレート72を回転可能に構成して、下部トッププレート72によって温度検出装置100を回転させて、温度センサ112の位置を変更してもよい。この後、再度、ステップS104からS106が実行される。
この後、温度検出装置100が、予め定められた検出位置で温度を検出した場合、制御部18は温度の検出が終了したと判断して(S108:Yes)、温度検出装置100は、ロボットアーム54、30、24によって加熱加圧装置56から基板貼り合わせ装置10の外部へと搬出される(S112)。尚、温度検出装置100は、移動ステージ38上で、下基板ホルダ202及び上基板ホルダ204から取り外される。これにより、温度検出処理が終了する。
上述したステップS110の温度センサの位置変更について説明する。図10〜図12は、温度センサの位置変更を説明する平面図である。図10〜図12に示す、温度センサ112及び加熱部74の位置及び個数は一例であり適宜変更してよい。下部モジュール60の加熱部74に対する下側の温度検出部102の温度センサ112の相対位置の変更について説明するが、上部モジュール62の加熱部84に対する上側の温度検出部102の温度センサ112の相対位置の変更についても同様である。尚、説明の都合上、温度センサの一部に「112a、112b」を付与する。
最初、図10に示すように、温度センサ112が、加熱部74の上部に配置されて、温度を検出する。次に、温度検出装置100が移動ステージ38によって自身の中心の周りに回転された後、再度、加熱加圧装置56へと搬送される。ここで、温度検出装置100の回転角度は特に限定されるものではない。一例として、図11に示すように、加熱部74が、下部トッププレート72の中心の周りに90度間隔で配置されている場合、例えば、温度検出装置100の回転角度は90度よりも小さい30度である。これにより、温度検出装置100の回転量を小さくしつつ、加熱部74が配置されていない領域を含む細かい領域の温度を検出できる。この後、温度検出装置100は温度を検出して、出力する。
更に、温度検出装置100は、検出回数、回転されて、その都度、温度を検出して出力する。検出回数は、少なくとも温度センサ112が温度検出装置100の中心の周りに配置されている角度間隔以上、各温度センサ112が回転するように設定することが好ましい。例えば、温度センサ112が、中心の周りに90度間隔で配置され、且つ、一度の回転角度が30度の場合、検出回数は3回以上が好ましい。ここで、複数回数、回転されると、温度センサ112は、1回前または複数回前の他の温度センサ112と同じ位置に配置される。例えば、1回の回転角度が30度であって、温度センサ112が温度検出装置100の中心の周りに90度間隔で配置されている場合、図12に示す3回の位置変更後、加熱部74に対する温度センサ112aの相対位置は、図10に示す他の温度センサ112bの3回の位置変更前の相対位置となる。これにより、位置変更後の温度センサ112aが、位置変更前の他の温度センサ112bが検出した位置と同じ位置になった状態で温度を検出することになる。このため、それぞれの温度センサ112a、112bが、検出した温度を比較することにより、各温度センサ112a、112bの検出能力の違い、配線114等により生じるノイズ等に起因する誤差を制御部18が検出できる。この誤差を修正して、検出される温度の精度を向上させることができる。
図13は、重ね合わせ基板の貼り合わせ工程を説明するフローチャートである。図14〜図16は、基板貼り合わせ装置による重ね合わせ基板の貼り合せ工程を説明する図である。
貼り合わせ工程では、まず、一対の基板90、90が位置合わせされる(S200)。詳細には、ロボットアーム30が、上基板ホルダ204を基板ホルダラック22から移動ステージ38に搬送した後、ロボットアーム24がプリアライナ26を経由して基板90を上基板ホルダ204へと搬送する。この後、ロボットアーム30が、基板90を静電吸着する上基板ホルダ204の上下を反転させた後、固定ステージ36へと搬送する。
同様に、ロボットアーム30が下基板ホルダ202を移動ステージ38へと搬送した後、ロボットアーム24が基板90を下基板ホルダ202へと搬送する。この後、図14に示すように、移動ステージ38によって、一対の基板90、90が位置合わせされた後、下基板ホルダ202が、上基板ホルダ204を静電吸着する。次に、下基板ホルダ202、基板90、90及び上基板ホルダ204が、ロボットアーム30、54によって加熱加圧装置56へと搬送される(S202)。
この後、加熱加圧装置56の周囲を真空状態にした後、昇降部66が上昇して、図15に示すように、一対の基板90、90を含む重ね合わせ基板92が、下部トッププレート72及び上部トッププレート82の間で加圧される。この後、制御部18が加熱部74、84に電力を供給することにより、重ね合わせ基板92が加熱部74、84によって加熱される。これにより、重ね合わせ基板92が貼り合わされる(S204)。ここで、加熱加圧装置56では、制御部18が、温度検出処理によって検出された温度に基づいて、各加熱部74、84の加熱温度を制御する。例えば、特定の領域の温度が高くなる傾向が検出された場合、その領域の近傍の加熱部74、84には、他の加熱部74、84に比べて電力供給を低減する。このようにして、温度検出処理によって検出された温度に基づいて、加熱部74、84を制御する。これにより、重ね合わせ基板92が、上下及び面内の温度のばらつきが低減された状態で、加熱加圧される。尚、重ね合わせ基板92が、貼り合わされて加熱を終了した後、冷却管76、86に流体を供給して冷却してもよい。冷却管76、86への流体の供給は、温度検出処理により検出された温度に基づいて供給してもよい。例えば、冷却の進行が遅い領域には、冷却管76、86に供給する流体の量を増加させるか、または、低温の流体を供給する。
この後、重ね合わせ基板92が、ロボットアーム54、30、24によって搬送されて、基板貼り合わせ装置10の外部へと搬出される(S206)。図16に示すように、搬送の途中で、重ね合わせ基板92は、下基板ホルダ202及び上基板ホルダ204から取り外される。これにより、基板90、90の貼り合わせ処理が終了する。
上述したように、温度検出装置100では、一対の温度検出部102、102が、断熱部材104と加熱部74との間、及び、断熱部材104と加熱部84との間に配置されている。これにより、上側の加熱部84の熱が、加熱部74と断熱部材104との間に配置された下側の温度検出部102に伝達されることを断熱部材104が抑制する。このため、上側の加熱部84の熱の影響が小さい状態で、下側の温度検出部102が、下側の加熱部74によって加熱された温度分布を検出することができる。同様に、下側の加熱部74の影響が小さい状態で、上側の温度検出部102が、上側の加熱部84による温度を検出することができる。この結果、温度分布の偏り等の温度異常が、いずれの加熱部74、84に起因するかを容易に特定できる。
温度検出装置100は、移動ステージ38によって自身の中心の周りに回転されつつ、複数回、加熱加圧装置56の温度を検出する。これにより、温度検出装置100は、温度センサ112の個数が少ない場合でも、より細かい領域の温度を検出することができる。この結果、温度検出装置100は、温度分布の検出精度を向上させることができる。
温度検出装置100は、一の温度センサ112aが、他の温度センサ112bが既に検出した領域の温度を検出する。これにより、温度検出装置100は、各温度センサ112の検出能力等による誤差に起因する検出される温度のばらつきを抑制できる。
基板貼り合わせ装置10では、重ね合わせ基板92を搬送するロボットアーム24、30、54によって、温度検出装置100を搬送できる。これにより、基板貼り合わせ装置10の構成を複雑化することなく、上述の効果を奏することができる。更に、温度検出装置100をロボットアーム24、30、54によって搬送及び設置するので、ユーザが設置する場合と異なり、加熱加圧装置56を大気圧にする必要がない。これにより、加熱加圧装置56の汚染を抑制することができるとともに、加熱加圧装置56を真空状態にする作業を低減できる。
上述の実施形態では、温度検出装置100が検出した温度を無線通信により出力する例を示したが、温度検出装置100が、記憶部を備え、検出した温度を記憶部に記憶するように構成してもよい。この場合、温度検出装置100が、基板貼り合わせ装置10から取り出された後、温度の情報が外部のコンピュータ等によって取得される。また、例えば、加熱加圧装置56に温度検出装置100と信号を入出力可能な接続部を設けて、温度検出装置100が、接続部を介して、有線通信により検出した温度を出力してもよい。当該接続部は、ロボットアーム54によって搬送した場合でも、容易に接続できるように弾性変形可能な構成が好ましい。
上述の実施形態では、温度検出装置100により検出された温度に基づいて、加熱部74、84を制御する例を示したが、検出温度に基づいて、昇降部66及び下部圧力制御モジュール68による加圧状態での圧力を制御してもよい。例えば、下部圧力制御モジュール68により、中心または外周等の特定の領域の圧力を大きくまたは小さくしてもよい。これにより、加熱部74、84から重ね合わせ基板92に伝達される温度を領域毎に変化させて、制御することができる。また、検出温度に基づいて、冷却管76、86に供給される流体を、加熱時にも領域毎に制御してもよい。これによっても、重ね合わせ基板92の加熱温度を制御することができる。
上述の実施形態では、下側の温度検出部102の温度センサ112の個数は、加熱部74の個数より少なくしたが、下側の温度センサ112の個数を加熱部74の数と少なくとも同数にしてもよい。更に、温度センサ112が、加熱部74と対応する位置に設けることによって、複数の加熱部74のそれぞれに対応して、複数の温度センサ112を一対一に配置してもよい。これにより、各加熱部74の温度を一度に検出することができる。また、上側の温度センサ112と加熱部84とを同様に一対一になるように構成してもよい。このように構成した場合であっても、温度センサ112と加熱部74との相対位置を変更して温度を複数回検出してもよい。これにより、温度センサ112の検出能力等に起因する誤差を低減できる。
上述の実施形態では、一対の温度検出部102、102を断熱部材104の両側に設けたが、断熱部材104の一方にのみ温度検出部102を設けてもよい。この場合、温度を検出した後、ロボットアーム54によって、断熱部材104と温度検出部102との位置関係を反転させて、温度を再度検出してもよい。例えば、先に、断熱部材104を温度検出部102の上側に配置した状態で、温度検出部102に温度を検出させる。この温度は、加熱部74の加熱によるものとなる。この後、ロボットアーム54によって断熱部材104及び温度検出部102の上下位置を反転させる。これにより、温度検出部102は、断熱部材104の上側に配置された状態で温度を検出する。この状態で検出された温度は、加熱部84の加熱によるものとなる。
上述の実施形態では、上下の温度検出部102の温度センサ112の位置を同じ場所に配置したが、上下の温度センサ112の位置を異なる場所に設定してもよい。この場合、温度を検出した後、ロボットアーム54によって、上側の温度検出部102と下側の温度検出部102とを断熱部材104とともに反転させて、温度を再度検出してもよい。これにより、温度検出装置100をアライナ28まで移動させることなく、異なる領域の温度を検出することができる。
上述の実施形態では、温度検出装置100が加熱加圧装置56の温度を検出する例を示したが、温度検出装置100が搬送中の温度を検出して、出力するようにしてもよい。ここでいう搬送中の温度とは、搬送中の周囲の雰囲気温度、アライナ28の温度、ロボットアーム24、30、54の温度等である。これにより、加熱加圧装置56以外の温度に起因する異常を検出することができる。尚、検出した温度は、無線通信及び有線通信によって出力してもよく、記憶部に記憶させた後、出力してもよい。
上述の実施形態では、温度検出装置100を回転させることにより、加熱部74、84に対する温度センサ112の相対位置を変更したが、温度検出装置100の径方向等、直線的に温度検出装置100を移動させて温度センサ112の当該相対位置を変更してもよい。
上述した実施形態では、温度検出装置100と重ね合わせ基板92とを同じ下基板ホルダ202及び上基板ホルダ204によって保持したが、温度検出装置100と重ね合わせ基板92を保持する基板ホルダを異なる構成としてもよい。また、下基板ホルダ202及び上基板ホルダ204を省略して、温度検出装置100及び重ね合わせ基板92をそれぞれ単独で搬送してもよい。
断熱部材104は中空状に形成してもよい。尚、中空部は、真空状態が好ましい。また、温度検出基板110の温度センサ112が設けられていない面に形成された酸化膜等の断熱性を有する薄膜によって断熱部材104を構成してもよい。
上述した実施形態では、温度センサ112を温度検出基板110に設けたが、温度センサ112を断熱部材104と加熱部74、84との間であって、他の領域に設けてもよい。例えば、温度センサ112を下部トッププレート72及び上部トッププレート82に設けてもよい。この場合、下基板ホルダ202及び上基板ホルダ204は、断熱部材104のみを保持して搬送する。また、温度検出基板110は、省略してよい。
上述の実施形態では、温度検出処理では、貼り合わせ処理での温度と同じ温度まで加熱したが、温度検出処理での加熱温度は適宜変更してよい。例えば、下側または上側の一方の温度は、貼り合わせ処理と同じ加熱温度として、他方はその加熱温度よりも低温にしてもよい。これにより、貼り合わせ処理と同じ加熱温度側の温度検出部は、他方の加熱部の温度の影響がより低減された状態で、温度を検出することができる。これにより、温度検出装置100は、温度の偏りをより顕著に検出することができる。尚、他方の低温の程度は、熱膨張の違いにより温度検出装置100が破損しない程度である。また、重ね合わせ基板92が、異なる種類の基板90、90の場合、上下で異なる温度によって加熱して基板90、90を貼り合わせる。この場合でも、上述の上側と下側の温度を異ならせた状態で実行する温度検出処理が有効である。
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更または改良を加えることが可能であることが当業者に明らかである。その様な変更または改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現しうることに留意すべきである。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。