JP5772222B2 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- JP5772222B2 JP5772222B2 JP2011119224A JP2011119224A JP5772222B2 JP 5772222 B2 JP5772222 B2 JP 5772222B2 JP 2011119224 A JP2011119224 A JP 2011119224A JP 2011119224 A JP2011119224 A JP 2011119224A JP 5772222 B2 JP5772222 B2 JP 5772222B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- rotational speed
- sensor
- rear wheel
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P60/00—Technologies relating to agriculture, livestock or agroalimentary industries
- Y02P60/14—Measures for saving energy, e.g. in green houses
Landscapes
- Transplanting Machines (AREA)
- Guiding Agricultural Machines (AREA)
- Lifting Devices For Agricultural Implements (AREA)
- Control Of Fluid Gearings (AREA)
Description
そこで、本発明の課題は、エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた苗移植機などの作業車両を提供することである。
さらに、トルクセンサ(17)の検出値が設定されたピーク値を下回ると共に、エンジン回転数センサ(16)の検出値が設定されたピーク値を上回るときは、油圧式無段変速装置(23)の開度を下げてトルク値を上げた後、駆動トルクとエンジン回転数が設定された最大値になると油圧式無段変速装置(23)の開度を設定された開度に戻す制御を行なう構成としたことにより、エンジン回転数を急激に低下させることなくエンジン出力特性に合わせることができるので、機体の揺れや燃費の悪化が防止される。
さらに、ハンドル(34)操作時にハンドル切角センサ(28)が旋回角度を検出したとき、現在の油圧式無段変速装置(23)の開度を記憶し、旋回角度未満にハンドル(34)が戻されると、記憶した油圧式無段変速装置(23)の開度に自動的に変更する構成としたことにより、作業者は旋回後に油圧式無段変速装置(23)の開度を操作する必要がなく、操作性や作業能率が従来よりも向上する。
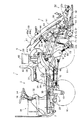
図1及び図2は本発明を用いた一実施例である乗用型苗移植機の側面図と平面図である。この乗用型苗移植機1は、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着されている。また、図3に本実施例の乗用型田植機の制御ブロック図を示す。
また、走行車体2の後側に昇降リンク装置3を介して苗植付部4が昇降可能に装着され、走行車体2の後部上側に施肥装置5の本体部分が設けられている。
また、走行車体2の前部左右両側には、補給用の苗を載せておく予備苗載台38を設けても良い。昇降リンク装置3は平行リンク構成であって、1本の上リンク40と左右一対の下リンク41,41を備えている。これらリンク40,41,41は、その基部側がメインフレーム15の後端部に立設した背面視門形のリンクベースフレーム42に回動自在に取り付けられ、その先端側に縦リンク43が連結されている。
整地ロータ27a、27bの支持構造を図4(背面図)に示し、整地ロータ27a、27bの駆動部の概略構成図を図5に示す。
また、図4に示すロータ昇降用モータ63に代えて支持アーム67に支持されたロータ高さ調節レバー69(図1)の操作により支持アーム67を前後方向に回動させてロータ支持フレーム68を上下動させても良い。
なお、図8において「エンジン回転数x」には、エンジン回転数センサ16による常時計測する計測値を定区間で平均化した値を使用する。
こうして、後輪回転数センサ22の検出値による数値上の移動距離とGPSレシーバー23よる実際の移動距離とを比較することができるので、湿地などスリップが発生しやすい場所であっても、作業条件に適合する制御を行うことができる。
操舵用ハンドル34の切角度を検出するハンドル切角センサ28が所定値(例;90〜120度以上)以上の切角度を検出すると、現在のHST開度を記憶し、所定時間(例;約3〜5秒)内の後輪回転数センサ22の回転数と、GPSレシーバー23から得た移動距離を算出し、両者が共に設定値(例:約1〜2回転、1.0〜1.5m)内であれば、現在のHST開度を維持し、GPSレシーバー23から得られる旋回時の移動距離(以下、旋回距離という)に比べて後輪回転数センサ22の検出値に基づき得られる旋回距離が大きい場合は、スリップが生じていると判断し、HSTサーボアクチュエータ30を作動させてHST開度を下げ、GPSレシーバー23から得られる旋回距離に比べて後輪回転数センサ22の検出値に基づき得られる旋回距離が小さい場合は、圃場の抵抗が小さいと判断し、HSTサーボアクチュエータ30を作動させてHST開度を上げ、ハンドル切角センサ28の検出角度が予め決められた所定角度(例;120〜90度未満)未満になると、旋回移動前のHST開度に戻す制御構成を行う。
3 昇降リンク装置 4 苗植付部
10 前輪 11 後輪
11a 後輪駆動軸 12 ミッションケース
13 前輪ファイナルケース 15 メインフレーム
16 エンジン回転数センサ 17 エンジントルクセンサ
18 後輪ギアケース 18a,18c 伝動シャフト
18b ユニバーサルジョイント 19 畦クラッチレバー
19a 畦クラッチレバーセンサ 20 エンジン
23 静油圧式無段変速装置(HST)
24 防波板 25 防波板アーム
26 植付伝動軸 27(27a,27b) 整地ロータ
31 座席 32 フロントカバー
34 ハンドル 35 フロアステップ
36 リヤステップ 37 ロータカバー
38 予備苗載台 40 上リンク
41 下リンク 42 リンクベースフレーム
43 縦リンク 44 連結軸
46 昇降用油圧シリンダ 50 伝動ケース
51 苗載台 51a 苗取出口
52 苗植付装置
53 ブロア用電動モータ 54 苗送りベルト
55 センターフロート 56 サイドフロート
58 ブロア 59 エアチャンバ
60 肥料ホッパ 61 繰出部
62 施肥ホース 63 ロータ昇降用モータ
64 作溝体 65 苗植付部支持枠体
65a 支持ローラ 65b 両側辺部材
66 梁部材 67 支持アーム
68 ロータ支持フレーム 69 ロータ高さ調節レバー
70(70a,70b) ロータ駆動軸
70a 駆動軸 70v ベベルギア
70c 整地入力伝動ケース 71 連結部材
72 整地伝動軸 72a 入力側伝動軸
72a1 爪クラッチ 72b 出力側伝動軸
72c1 爪クラッチ 72c スプライン部材
72d スプリング 72v ロータ入力ベベルギヤ
73 ロータ駆動軸ケース 73a 駆動チェーン
74 補強部材 74a 取付片
76 第一リンク部材 77 第二リンク部材
78 スプリング
94 フロート傾斜角度検出センサ(昇降リンクスイッチ)
100 制御装置
Claims (6)
- 前輪(10)及び後輪(11)を備えた走行車体(2)とエンジン(20)と油圧式無段変速装置(23)を設けた作業車両において、
該エンジン(20)の回転数を計測するエンジン回転数センサ(16)を設け、該エンジン(20)の駆動トルクを検出するトルクセンサ(17)を設け、前記油圧式無段変速装置(23)の開度を調節するHSTサーボアクチュエータ(30)を設け、
前記エンジン回転数センサ(16)とエンジン(20)の駆動トルクから適切なエンジン出力特性となる仮想ラインを設定し、
前記トルクセンサ(17)が検出するエンジン(20)の駆動トルクが前記仮想ラインを上回ると共に、前記エンジン回転数センサ(16)が検出するエンジン(20)の回転数が設定されたピーク値を下回るときは、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を増加させ、
前記トルクセンサ(17)が検出するエンジン(20)の駆動トルクが前記仮想ラインを下回ると共に、前記エンジン回転センサ(16)が検出するエンジン(20)の回転数が設定されたピーク値を下回るときは、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を減少させると共に、前記トルクセンサ(17)が検出するエンジン(20)の駆動トルクが設定されたピーク値を下回ると共に、エンジン回転数センサ(16)が検出するエンジン(20)の回転数が設定されたピーク値を上回るときは、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を下げてトルク値を上げ、駆動トルクとエンジン回転数が設定された最大値になると油圧式無段変速装置(23)の開度を設定された開度に戻す制御を行なう制御装置(100)を設けたことを特徴とする作業車両。 - 前記走行車体(2)に後輪(11)の回転数を検出する後輪回転数センサ(22)を設け、
衛星情報から位置情報を取得するGPSレシーバー(23)を設け、
前記制御装置(100)は、所定区間内の前記後輪回転数センサ(22)の検出回転数に基づく移動距離と、前記GPSレシーバー(23)からの情報に基づく移動距離をそれぞれ算出し、前記2つの移動距離が共に設定値内であれば、現在のHST開度を維持し、
GPSレシーバー(23)からの情報に基づく移動距離に比べて後輪回転数センサ(22)の検出回転数に基づく移動距離が大きいときはスリップが生じていると判断し、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を下げ、
GPSレシーバー(23)からの情報に基づく移動距離に比べて後輪回転数センサ(22)の検出回転数に基づく移動距離が小さいときは圃場の抵抗が小さいと判断し、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を上げる制御を行なうことを特徴とする請求項1に記載の作業車両。 - 前記走行車体(2)に操舵用ハンドル(34)を設け、該操舵用ハンドル(34)の切角度を検出するハンドル切角センサ(28)を設け、
前記制御装置(100)は、該ハンドル切角センサ(28)が所定値以上の切角度を検出すると、現在の油圧式無段変速装置(23)の開度を記憶すると共に、所定時間内の前記後輪回転数センサ(22)の回転数とGPSレシーバー(23)からの情報に基いて各々移動距離を算出し、
該2つの移動距離が共に設定値内であれば、現在の油圧式無段変速装置(23)の開度を維持し、
前記GPSレシーバー(23)からの情報に基づく旋回時の移動距離に比べて、前記後輪回転数センサ(22)の検出値に基づき得られる旋回時の移動距離が大きい場合はスリップが生じていると判断し、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を下げると共に、
前記GPSレシーバー(23)から得られる旋回時の移動距離に比べて後輪回転数センサ(22)の検出値に基づき得られる旋回時の移動距離が小さいときは圃場の抵抗が小さいと判断し、前記HSTサーボアクチュエータ(30)を作動させて油圧式無段変速装置(23)の開度を上げると共に、
前記ハンドル切角センサ(28)の検出角度が予め決められた所定角度未満になると旋回移動前の油圧式無段変速装置(23)の開度に戻す制御を行なうことを特徴とする請求項2に記載の作業車両。 - 前記走行車体(2)の後部に昇降自在に作業装置(4)を設け、該作業装置(4)に圃場を均す整地装置(27a,27b)を設け、該整地装置(27a,27b)の上下位置を調節する整地装置昇降アクチュエータ(63)を走行車体(2)に設け、前記作業装置(4)の左右両側に波の発生を防止する防波部材(25)を回動可能に設けると共に、該防波部材(25)の回動を検出する防波部材回動検知装置(29)を設け、
前記制御装置(100)は、該防波部材回動検知装置(29)が所定値以上の防波部材(25)の回動を検出すると、前記整地装置昇降アクチュエータ(63)を作動させて整地装置(27a,27b)を昇降させる制御を行なうことを特徴とする請求項1から3のいずれか1項に記載の作業車両。 - 前記防波部材回動検知装置(29)が所定値以上の回動を検出し、且つ後輪(11)の回転数を検出する後輪回転数センサ(22)の回転数が所定値未満のときは、前記昇降アクチュエータ(30)を作動させないことを特徴とする請求項4に記載の作業車両。
- 前記作業装置(4)の下部に作業装置の高さを検出するフロート(55)を設け、
該作業装置(4)を昇降させる作業装置昇降アクチュエータ(46)の伸縮量を検出・記録する伸縮量センサ(81)を設け、
前記制御装置(100)は、後輪(11)の回転数を検出する後輪回転数センサ(22)の回転数から走行車体(2)の走行速度を算出し、走行速度が所定値以上になると作業装置昇降アクチュエータ(46)を作動させて作業装置(4)を上昇させると共に、前記作業装置(4)の上昇が完了すると作業装置昇降アクチュエータ(46)の伸縮量を伸縮量センサ(81)が記憶することを特徴とする請求項1から5のいずれか1項に記載の作業車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119224A JP5772222B2 (ja) | 2011-05-27 | 2011-05-27 | 作業車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011119224A JP5772222B2 (ja) | 2011-05-27 | 2011-05-27 | 作業車両 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012244939A JP2012244939A (ja) | 2012-12-13 |
| JP2012244939A5 JP2012244939A5 (ja) | 2014-07-10 |
| JP5772222B2 true JP5772222B2 (ja) | 2015-09-02 |
Family
ID=47466026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011119224A Expired - Fee Related JP5772222B2 (ja) | 2011-05-27 | 2011-05-27 | 作業車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5772222B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6032177B2 (ja) * | 2013-10-29 | 2016-11-24 | 井関農機株式会社 | 作業車両 |
| JP6569213B2 (ja) * | 2014-11-28 | 2019-09-04 | 井関農機株式会社 | 作業車両及び農作業支援システム |
| JP6544158B2 (ja) * | 2015-09-08 | 2019-07-17 | 井関農機株式会社 | 苗移植機 |
| JP7142596B2 (ja) * | 2019-03-28 | 2022-09-27 | 三菱マヒンドラ農機株式会社 | 移植機 |
| JP2020188736A (ja) * | 2019-05-23 | 2020-11-26 | 三菱マヒンドラ農機株式会社 | マルチ田植機 |
| JP7253150B2 (ja) * | 2020-11-19 | 2023-04-06 | 井関農機株式会社 | 苗移植機 |
| JP7088346B1 (ja) * | 2021-03-08 | 2022-06-21 | 井関農機株式会社 | 制御装置 |
| KR102526684B1 (ko) * | 2021-10-19 | 2023-04-28 | 주식회사 긴트 | 차량 이산화탄소 배출 저감 방법 및 시스템 |
| CN119032727A (zh) * | 2024-08-14 | 2024-11-29 | 浙江工业大学 | 一种智能割草机的故障检测方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6331529Y2 (ja) * | 1980-07-18 | 1988-08-23 | ||
| JP4025528B2 (ja) * | 2001-10-24 | 2007-12-19 | ヤンマー農機株式会社 | ロータリー耕耘作業機を備えたトラクタの走行制御装置 |
| JP2006217865A (ja) * | 2005-02-10 | 2006-08-24 | Iseki & Co Ltd | 苗植機の苗植昇降制御装置 |
| JP5280131B2 (ja) * | 2008-08-21 | 2013-09-04 | 三菱農機株式会社 | 移植機 |
| JP5391717B2 (ja) * | 2009-02-16 | 2014-01-15 | 井関農機株式会社 | 可変散布装置 |
| JP5417956B2 (ja) * | 2009-04-13 | 2014-02-19 | 井関農機株式会社 | 直播機 |
-
2011
- 2011-05-27 JP JP2011119224A patent/JP5772222B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012244939A (ja) | 2012-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5772222B2 (ja) | 作業車両 | |
| JP2012244939A5 (ja) | ||
| JP5045654B2 (ja) | 乗用型田植機 | |
| JP5418537B2 (ja) | 乗用田植機 | |
| JP5954468B2 (ja) | 乗用型田植機 | |
| JP4998223B2 (ja) | 苗移植機 | |
| JP5056677B2 (ja) | 苗移植機 | |
| JP2005341809A (ja) | 農作業機 | |
| JP2011055779A (ja) | 作業車両 | |
| JP2007252319A (ja) | 農作業機 | |
| JP2007252319A5 (ja) | ||
| JP4893701B2 (ja) | 乗用田植機 | |
| JP5387654B2 (ja) | 対地作業装置付きの苗移植機 | |
| JP4918988B2 (ja) | 対地作業装置付きの苗移植機 | |
| JP5656344B2 (ja) | 走行車両 | |
| JP2009261330A (ja) | 苗移植機 | |
| JP2014217394A (ja) | 乗用田植機 | |
| JP5590017B2 (ja) | 乗用型田植機 | |
| JP2011087525A (ja) | 作業車両 | |
| JP5212236B2 (ja) | 作業車両 | |
| JP4241738B2 (ja) | 農作業機 | |
| JP2010173486A (ja) | 走行車両 | |
| JP2008005739A (ja) | 整地装置 | |
| JP5561316B2 (ja) | 走行車両 | |
| JP5831500B2 (ja) | 作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150317 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150515 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150615 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5772222 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |