JP2006217865A - 苗植機の苗植昇降制御装置 - Google Patents
苗植機の苗植昇降制御装置 Download PDFInfo
- Publication number
- JP2006217865A JP2006217865A JP2005034501A JP2005034501A JP2006217865A JP 2006217865 A JP2006217865 A JP 2006217865A JP 2005034501 A JP2005034501 A JP 2005034501A JP 2005034501 A JP2005034501 A JP 2005034501A JP 2006217865 A JP2006217865 A JP 2006217865A
- Authority
- JP
- Japan
- Prior art keywords
- seedling planting
- seedling
- vehicle body
- planting
- lowering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Transplanting Machines (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Abstract
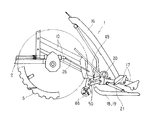
【解決手段】 苗植装置の対地高さを一定に維持するように制御する植付昇降制御モードと、苗植車体の前後傾斜に基づいて該苗植装置を自動的に昇降させて畦越えしながら苗植付する畦越え植付昇降制御モードとを備えたことを特徴とする苗植機の苗植昇降制御装置の構成とする。
【選択図】 図1
Description
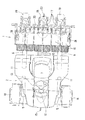
2 車体
27 昇降リンクセンサ
31 フロートセンサ
32 前後傾斜センサ
33 後輪回転数センサ
34 昇降バルブ
35 植付クラッチモータ
36 前輪デフロックソレノイド
37 HSTモータ
38 制御スイッチ
Claims (2)
- 苗植装置(1)の対地高さを一定に維持するように制御する植付昇降制御モードと、苗植車体(2)の前後傾斜に基づいて該苗植装置(1)を自動的に昇降させて畦越えしながら苗植付する畦越え植付昇降制御モードとを備えたことを特徴とする苗植機の苗植昇降制御装置。
- 前記車体(2)が前上り傾斜状態にあると共に、苗植装置(1)が下降位置を継続することによって、畦越え植付昇降制御モードへ自動的に切替わることを特徴とする請求項1に記載の苗植機の苗植昇降制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005034501A JP2006217865A (ja) | 2005-02-10 | 2005-02-10 | 苗植機の苗植昇降制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005034501A JP2006217865A (ja) | 2005-02-10 | 2005-02-10 | 苗植機の苗植昇降制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006217865A true JP2006217865A (ja) | 2006-08-24 |
| JP2006217865A5 JP2006217865A5 (ja) | 2007-04-12 |
Family
ID=36980581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005034501A Pending JP2006217865A (ja) | 2005-02-10 | 2005-02-10 | 苗植機の苗植昇降制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006217865A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009278923A (ja) * | 2008-05-23 | 2009-12-03 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2010104256A (ja) * | 2008-10-28 | 2010-05-13 | Iseki & Co Ltd | 苗植機の苗植昇降制御装置 |
| JP2012191958A (ja) * | 2012-07-17 | 2012-10-11 | Mitsubishi Agricultural Machinery Co Ltd | 移植機 |
| JP2012244939A (ja) * | 2011-05-27 | 2012-12-13 | Iseki & Co Ltd | 作業車両 |
| CN103917083A (zh) * | 2011-09-30 | 2014-07-09 | 洋马株式会社 | 插秧机的载秧台 |
| JP2022081280A (ja) * | 2020-11-19 | 2022-05-31 | 井関農機株式会社 | 苗移植機 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108515A (ja) * | 1996-10-04 | 1998-04-28 | Kubota Corp | 田植機 |
| JP2000125625A (ja) * | 1998-08-19 | 2000-05-09 | Yanmar Agricult Equip Co Ltd | 田植機 |
| JP2000245210A (ja) * | 1999-03-02 | 2000-09-12 | Kubota Corp | 乗用型田植機の昇降制御構造 |
| JP2000300018A (ja) * | 1999-04-15 | 2000-10-31 | Kubota Corp | 田植機の昇降制御装置 |
| JP2003219713A (ja) * | 2002-01-31 | 2003-08-05 | Iseki & Co Ltd | 水田作業機 |
| JP2004121038A (ja) * | 2002-09-30 | 2004-04-22 | Kubota Corp | 田植機の昇降制御装置 |
-
2005
- 2005-02-10 JP JP2005034501A patent/JP2006217865A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10108515A (ja) * | 1996-10-04 | 1998-04-28 | Kubota Corp | 田植機 |
| JP2000125625A (ja) * | 1998-08-19 | 2000-05-09 | Yanmar Agricult Equip Co Ltd | 田植機 |
| JP2000245210A (ja) * | 1999-03-02 | 2000-09-12 | Kubota Corp | 乗用型田植機の昇降制御構造 |
| JP2000300018A (ja) * | 1999-04-15 | 2000-10-31 | Kubota Corp | 田植機の昇降制御装置 |
| JP2003219713A (ja) * | 2002-01-31 | 2003-08-05 | Iseki & Co Ltd | 水田作業機 |
| JP2004121038A (ja) * | 2002-09-30 | 2004-04-22 | Kubota Corp | 田植機の昇降制御装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009278923A (ja) * | 2008-05-23 | 2009-12-03 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2010104256A (ja) * | 2008-10-28 | 2010-05-13 | Iseki & Co Ltd | 苗植機の苗植昇降制御装置 |
| JP2012244939A (ja) * | 2011-05-27 | 2012-12-13 | Iseki & Co Ltd | 作業車両 |
| CN103917083A (zh) * | 2011-09-30 | 2014-07-09 | 洋马株式会社 | 插秧机的载秧台 |
| JP2012191958A (ja) * | 2012-07-17 | 2012-10-11 | Mitsubishi Agricultural Machinery Co Ltd | 移植機 |
| JP2022081280A (ja) * | 2020-11-19 | 2022-05-31 | 井関農機株式会社 | 苗移植機 |
| JP7253150B2 (ja) | 2020-11-19 | 2023-04-06 | 井関農機株式会社 | 苗移植機 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006217865A (ja) | 苗植機の苗植昇降制御装置 | |
| JP2006217865A5 (ja) | ||
| JP5280131B2 (ja) | 移植機 | |
| JP2005198594A (ja) | 苗植機の苗植昇降制御装置 | |
| JP4416436B2 (ja) | 田植機 | |
| JP3236574B2 (ja) | 乗用作業機 | |
| JP2008029212A (ja) | 農作業機 | |
| JP5701677B2 (ja) | 田植機 | |
| JP3807881B2 (ja) | 乗用型田植機の苗植付装置昇降構造 | |
| JP2010051187A (ja) | 移動農作業機の変速操作装置 | |
| JP2010148443A (ja) | 苗植機の苗植操作装置 | |
| JP2016015956A (ja) | 移植機 | |
| JP4899373B2 (ja) | 作業車両 | |
| JP6644255B2 (ja) | トラクタ | |
| JP5402554B2 (ja) | 作業機 | |
| JP2001086817A (ja) | 水田作業機 | |
| JP3236552B2 (ja) | 乗用作業機 | |
| JP2001169624A (ja) | 農作業機 | |
| JP5174705B2 (ja) | 移植機 | |
| JP5404011B2 (ja) | 移植機 | |
| JP2007306943A (ja) | 苗移植機 | |
| JP5831500B2 (ja) | 作業機 | |
| JP3293247B2 (ja) | 田植機における植付部のリフト制御感度調節装置 | |
| JP6444637B2 (ja) | 移植機 | |
| JP4023651B2 (ja) | 作業車の作業装置昇降構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Effective date: 20070226 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080207 |
|
| A977 | Report on retrieval |
Effective date: 20100318 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100413 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100607 |
|
| A02 | Decision of refusal |
Effective date: 20101026 Free format text: JAPANESE INTERMEDIATE CODE: A02 |