図面を用いて、本発明の実施例について説明する。
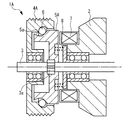
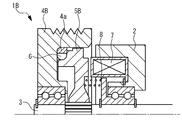
図1はウォータポンプ1Aの要部を示す図である。ウォータポンプ1Aはボディ2とシャフト3とプーリ4Aとスライドプレート5Aとボール6とコイル7とスプリング8とを備えている。ボディ2は筐体部材であり、ボディ2にはベアリングを介してシャフト3が設けられている。シャフト3は駆動軸であり、ボディ2から突出した部分にスプライン軸部3aを備えている。
プーリ4Aは駆動側回転体であり、ベアリングを介してシャフト3に設けられている。プーリ4Aはシャフト3のうち、スプライン軸部3aよりも先端側の部分に設けられている。プーリ4Aにはエンジンの駆動力を伝達可能なベルトを外周部に巻き掛けることで、エンジンの駆動力を伝達することができる。この点、ウォータポンプ1Aはエンジンの冷却水を圧送するウォータポンプとなっている。
プーリ4Aは有底円筒状の形状を有している。具体的にはプーリ4Aはボディ2側で円筒状に開口するとともに、ボディ2の反対側で有底円筒形状の底壁部をなす壁部を有している。そしてこれにより、外周部と対をなすように設けられた内周部を有している。さらにプーリ4Aはボディ2の反対側の壁部中央に開口するとともに、ボディ2側に向かって延伸する円筒状のベアリング保持部を内周部よりも内側の部分に有している。
スライドプレート5Aはスライド式の従動側回転体であり、スライドプレート5Aにはプーリ4Aから動力が伝達される。スライドプレート5Aはスプライン軸部3aに設けられている。この点、スライドプレート5Aは中央にスプライン穴を有しており、このスプライン穴を介してスプライン軸部3aに設けられている。そしてこれにより、軸方向に沿ってスライド可能に設けられるとともに、シャフト3と一体回転可能に設けられている。スプラインには例えば軸方向に沿って歯が設けられたスプラインのほか、ヘルカルスプラインなど適宜のスプラインが適用されてよい。
スライドプレート5Aは有底円筒状の形状を有している。具体的にはスライドプレート5Aはプーリ4A側で円筒状に開口するとともに、ボディ2側で有底円筒形状の底壁部をなす壁部を有している。スライドプレート5Aはプーリ4Aに挿入可能に設けられている。この点、スライドプレート5Aの外周部はプーリ4Aに挿入された状態で、プーリ4Aの内周部と隙間を有して対向するように設けられている。スライドプレート5Aの外周部には凹曲面状の壁面を有する溝部5aが設けられている。溝部5aは一周に亘って帯び状に設けられている。
ボール6はプーリ4A、スライドプレート5A間に介在するように設けられている。ボール6は複数(ここでは8つ)設けられている。ボール6の材質は例えば炭素鋼である。コイル7はボディ2に設けられている。コイル7はスライドプレート5Aに対向する位置に設けられており、通電時にプーリ4Aから離間する方向に磁性体からなるスライドプレート5Aを駆動する。
スプリング8はボディ2、スライドプレート5A間に設けられている。スプリング8は周方向に沿って均等に複数設けられている。スプリング8それぞれはスライドプレート5Aとともに回転できるように設けられている。スプリング8それぞれが摺動する部分にはスラストベアリングを設けることができる。スプリング8それぞれはプーリ4Aに接近する方向にスライドプレート5Aを駆動する。複数のスプリング8は駆動部に相当する。駆動部は例えば永久磁石であってもよい。
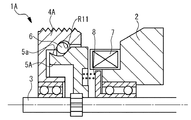
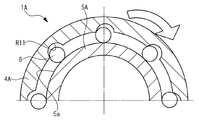
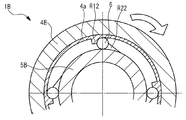
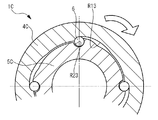
図2はコイル7非通電時の第1の動力伝達機構の水平断面図である。図3はコイル7非通電時の第1の動力伝達機構の垂直断面図である。ウォータポンプ1Aは駆動側ボール受け部R11それぞれと従動側ボール受け部R21それぞれと複数のボール6とを有して構成される噛み合い式の動力伝達機構である第1の動力伝達機構を備えている。
駆動側ボール受け部R11はプーリ4Aの内周部に設けられている。この点、プーリ4Aの内周部はボディ2側の部分よりも反対側の部分のほうが、径が小さくなるように設けられている。そして、駆動側ボール受け部R11はプーリ4Aの内周部のうち、ボディ2側の部分とは反対側の縮径した部分に隣接してボディ2側の部分に部分球状の空間を形成するように設けられている。駆動側ボール受け部R11が形成する部分球状の空間の径はボール6の径よりも若干大きめに設定されている。駆動側ボール受け部R11は周方向に沿って均等に複数(ここでは8つ)設けられている。この点、ボール6の数と駆動側ボール受け部R11の数とは互いに等しくなっている。
従動側ボール受け部R21は溝部5aに設けられている。この点、溝部5aは具体的には駆動側ボール受け部R11との間で径方向に沿った最深部同士の間隔がボール6の径よりも大きくなるように設けられている。また、ボディ2側とその反対側とで径が異なるプーリ4Aの内周部に対応させて、最深部よりもプーリ4A側のスロープ部のほうがボディ2側のスロープ部よりも径方向の高さが低くなるように設けられている。この点、スライドプレート5Aの外周部のうち、溝部5aよりもボディ2側の部分の径はプーリ4Aの内周部のうち、ボディ2側の部分の径よりも小さく、且つボディ2側とは反対側の部分の径よりも大きく設定されている。溝部5aはコイル7通電時に最深部が駆動側ボール受け部R11と対向するように設けられている。
従動側ボール受け部R21は具体的には溝部5aのうち、コイル7非通電時に軸方向において駆動側ボール受け部R11と位置が重なる部分に設けられている。従動側ボール受け部R21のうち、プーリ4Aの回転方向において後方となる部分には、ボール受け面が設けられている。このボール受け面は軸方向に沿った移動でボール6との係合状態が解除できるように設けられており、ボール6に合わせて窪んだ曲面形状を有している。従動側ボール受け部R21は周方向に沿って複数(ここでは8つ)設けられている。この点、ボール6の数と従動側ボール受け部R21の数とは互いに等しくなっている。
ボール6は具体的には径方向において駆動側ボール受け部R11と溝部5aとの間それぞれに介在するように設けられている。そしてこの状態で、対応する駆動側ボール受け部R11に保持されるように設けられている。このように設けられた複数のボール6はシャフト3に対して同心円状に配置されている。複数のボール6の数は作用する力の関係上、例えば4つ以上であることが好ましい。
コイル7を非通電にした場合の第1の動力伝達機構の動作は次の通りである。すなわち、コイル7を非通電にした場合にはスプリング8それぞれがスライドプレート5Aをプーリ4A側に駆動する。結果、従動側ボール受け部R21が軸方向においてボール6と重なる位置に配置される。また、ボール6それぞれが溝部5aのうち、ボディ2側のスロープ部によって径方向外側に位置する駆動側ボール受け部R11に押し付けられる。
そしてこの状態で、ボール6それぞれはプーリ4Aとともに回転し、対応する従動側ボール受け部R21それぞれに到達する。結果、第1の動力伝達機構が係合状態となる。このとき、ボール6それぞれはプーリ4A、スライドプレート5A間の噛み合いを仲介することで、コイル7の非通電時にプーリ4A、スライドプレート5A間の動力伝達を可能にする。この点、複数のボール6はボール部に相当している。
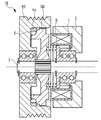
図4はコイル7通電時の第1の動力伝達機構の水平断面図である。図5はコイル7通電時の第1の動力伝達機構の垂直断面図である。コイル7に通電した場合の第1の動力伝達機構の動作は次の通りである。すなわち、コイル7に通電した場合にはコイル7がスプリング8の付勢力に抗してスライドプレート5Aをボディ2側に駆動する。結果、従動側ボール受け部R21が軸方向においてボール6と重なり合わない位置に配置される。また、溝部5aの最深部が駆動側ボール受け部R11に対向する位置に配置される。そしてこれにより、第1の動力伝達機構の係合状態が解除される。結果、ボール6それぞれを介したプーリ4A、スライドプレート5A間の動力伝達が切断される。
次にウォータポンプ1Aの作用効果について説明する。ウォータポンプ1Aでは、噛み合い式の動力伝達機構である第1の動力伝達機構がコイル7の通電時にプーリ4A、スライドプレート5A間の動力伝達を切断し、コイル7の非通電時にプーリ4A、スライドプレート5A間の動力伝達を可能にする。
この点、噛み合い式の動力伝達機構によれば、噛み合いによって係合状態を維持することから、例えば圧着式の動力伝達機構に対して生じる係合面積を増大させるための大型化や、係合面積を増大させるための構造変更といった要請が特段生じない。また、噛み合い式の動力伝達機構によれば、係合状態を確保するための圧着力を特段必要としない分、スプリング8の力も軽減できる。結果、通電時に要するコイル7の駆動力を低減できる分、消費電力の低減を図ることもできる。
このため、ウォータポンプ1Aは無励磁作動型の動力伝達機構を備える場合にコンパクトで簡素な構造を実現するとともに、消費電力の更なる低減を図ることができる。この点、ウォータポンプ1Aは消費電力の低減に応じたコイル7のコンパクト化を図ることができる点でもコンパクトな構造を実現できる。
ウォータポンプ1Aでは、ボール6それぞれがプーリ4A、スライドプレート5A間の噛み合いを仲介する。この点、ウォータポンプ1Aはボール6それぞれを噛み合いの仲介に用いることで、係合時にプーリ4Aとスライドプレート5Aとをくさびの効果で機械的にロックすることもできる。そしてこれにより、例えば回転変動によって動力の伝達が寸断される事態が発生することも防止できる。また、ウォータポンプ1Aはボール6それぞれを噛み合いの仲介に用いることで、係合時に加わる衝撃に対する強度も容易に確保できる。
ウォータポンプ1Aはボール6それぞれでプーリ4A、スライドプレート5A間の噛み合いを仲介するにあたって、噛み合い式の動力伝達機構がプーリ4Aに設けられた駆動側ボール受け部R11と、スライドプレート5Aに設けられた従動側ボール受け部R21とをボール6毎に備えるとともに、従動側ボール受け部R21が軸方向に沿った移動で対応するボール6との係合状態が解除できるように設けられたボール受け面を備える構成となっている。このため、ウォータポンプ1Aは係合解除時に係合状態が持続するストロークを短く設定することもできる。そしてこれにより、消費電力を低減することもできる。
ウォータポンプ1Aはボール6それぞれでプーリ4A、スライドプレート5A間の噛み合いを仲介するにあたって、スライドプレート5Aが係合時にボール6それぞれを径方向外側に位置する駆動側ボール受け部R11に押し付けるように作用するスロープ部を備えている。
このため、ウォータポンプ1Aは係合時にスライドプレート5Aの回転をプーリ4Aの回転に同期させるようにして、係合時に加わる衝撃を緩和することもできる。また、ウォータポンプ1Aはかかるスロープ部によってボール6それぞれにくさびの効果を発揮させることもできる。そしてこれにより、ボール6それぞれに遠心力が作用しても、プーリ4A、スライドプレート5A間の結合にゆるみが発生しないようにすることもできる。
なお、噛み合い式の動力伝達機構の適用対象としては、例えばエンジンで駆動されるエアコン用コンプレッサも考えられる。ところが、エアコン用コンプレッサの駆動トルクはウォータポンプの駆動トルクと比較して一般に大きくなっている。この点、噛み合い式の動力伝達機構は係合時に加わる衝撃の大きさに照らして、ウォータポンプとの相性がよい。また、噛み合い式の動力伝達機構である第1の動力伝達機構を備えるウォータポンプ1Aは圧着式の動力伝達機構で発生する摩擦面の経年劣化や摩擦係数の変化を特段考慮する必要がない点でも好適である。
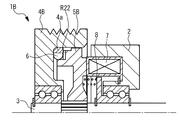
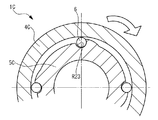
図6はウォータポンプ1Bの要部を示す図である。ウォータポンプ1Bはプーリ4Aの代わりにプーリ4Bを備えるとともに、スライドプレート5Aの代わりにスライドプレート5Bを備える点と、噛み合い式の動力伝達機構として第1の動力伝達機構の代わりに第2の動力伝達機構を備える点以外、ウォータポンプ1Aと実質的に同一となっている。
プーリ4Bは駆動側ボール受け部R11の代わりに駆動側ボール受け部R12を備える点と、これに伴いリングギヤ4aをさらに備えている点以外、プーリ4Aと実質的に同一となっている。スライドプレート5Bは従動側ボール受け部R21の代わりに従動側ボール受け部R22を備える点と、溝部5aが特段設けられていない点以外、スライドプレート5Aと実質的に同一となっている。リングギヤ4aはプーリ4Bの内周部およびボディ2とは反対側に位置する壁部に当接した状態でプーリ4Bに固定されている。第2の動力伝達機構は駆動側ボール受け部R12それぞれと従動側ボール受け部R22それぞれと複数(ここでは4つ)のボール6とを有して構成されている。
なお、ウォータポンプ1Bでは実施例1の場合と比較してボディ2やシャフト3にも形状が異なっている部分がある。但し、これらは実施例1の場合と同一であってもよい。このためここではボディ2およびシャフト3に関し、実施例1の場合と特に区別することなく、同一の符号を用いることとしている。
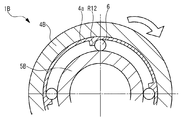
図7はコイル7非通電時の第2の動力伝達機構の水平断面図である。図8はコイル7非通電時の第2の動力伝達機構の垂直断面図である。駆動側ボール受け部R12はリングギヤ4aに設けられている。駆動側ボール受け部R12は具体的にはリングギヤ4aの内周面から径方向内側に向かって突出するように設けられている。駆動側ボール受け部R12のうち、プーリ4Bの回転方向において前方となる部分にはボール受け面が設けられている。このボール受け面は軸方向に沿った移動でボール6との係合状態が解除できるように設けられており、ボール6に合わせて部分円筒内面状に窪んだ曲面形状を有している。駆動側ボール受け部R12は周方向に沿って均等に複数(ここでは4つ)設けられている。プーリ4Bはリングギヤ4aを備えることで、駆動側ボール受け部R12を備えている。
従動側ボール受け部R22はスライドプレート5Bのうち、プーリ4B側の先端部に設けられている。この点、スライドプレート5Bのうち、プーリ4B側の先端部の径はリングギヤ4aの内周面との間で隙間を有して複数のボール6の配置を同心円状の配置に保持可能な径に縮径されている。そして、従動側ボール受け部R22は先端部外周面から径方向外側に向かって突出するように設けられている。
従動側ボール受け部R22のうち、プーリ4Bの回転方向において後方となる部分にはボール受け面が設けられている。このボール受け面はボール6の径に合わせて部分円筒内面状に窪んだ曲面形状を有している。ボール受け面は例えばボール6に合わせて部分球面状に窪んだ曲面形状であってもよい。従動側ボール受け部R22は周方向に沿って均等に複数(ここでは4つ)設けられている。スライドプレート5Bのうち、プーリ4B側の先端部に設けられた従動側ボール受け部R22は、コイル7の非通電時に軸方向において駆動側ボール受け部R12と位置が重なるように設けられている。
ボール6は径方向においてリングギヤ4aの内周部とスライドプレート5Bの先端部外周面との間に介在するように配置されている。また、周方向において隣り合う駆動側ボール受け部R12間それぞれに配置されている。このように配置された複数のボール6はシャフト3に対して同心円状に配置されている。ボール6それぞれはプーリ4Bの回転中に駆動側ボール受け部R12に当接した状態で保持されるようになっている。複数のボール6の数と駆動側ボール受け部R12の数と従動側ボール受け部R22の数とは互いに等しくなっている。
コイル7を非通電にした場合の第2の動力伝達機構の動作は次の通りである。すなわち、コイル7を非通電にした場合にはスプリング8それぞれがスライドプレート5Bをプーリ4B側に駆動する結果、従動側ボール受け部R22が軸方向において駆動側ボール受け部R12と重なる位置に配置される。そしてこの状態で、ボール6それぞれが駆動側ボール受け部R12に当接した状態でプーリ4Bとともに回転し、対応する従動側ボール受け部R22それぞれに到達する。結果、第2の動力伝達機構が係合状態となる。このとき、ボール6それぞれはプーリ4B、スライドプレート5B間の噛み合いを仲介することで、コイル7の非通電時にプーリ4B、スライドプレート5B間の動力伝達を可能にする。
図9はコイル7通電時の第2の動力伝達機構の水平断面図である。図10はコイル7通電時の第2の動力伝達機構の垂直断面図である。
コイル7に通電した場合の第2の動力伝達機構の動作は次の通りである。すなわち、コイル7に通電した場合にはコイル7がスプリング8それぞれの付勢力に抗してスライドプレート5Bをボディ2側に駆動する。結果、従動側ボール受け部R22はリングギヤ4a(より具体的には駆動側ボール受け部R12)と軸方向において重なり合わない位置に配置される。そしてこれにより、第2の動力伝達機構の係合状態が解除される。結果、ボール6それぞれを介したプーリ4B、スライドプレート5B間の動力伝達が切断される。
かかるウォータポンプ1Bも噛み合い式の動力伝達機構である第2の動力伝達機構を備えることで、ウォータポンプ1Aの場合と同様の作用効果を得ることができる。また、ボール6それぞれをプーリ4B、スライドプレート5B間の噛み合いの仲介に用いることや、従動側ボール受け部R22が軸方向に沿った移動で対応するボール6との係合状態が解除できるように設けられたボール受け面を備える構成とすることで、ウォータポンプ1Aの場合と同様の作用効果を奏することができる。
図11はコイル7非通電時の第3の動力伝達機構の水平断面図である。図12はコイル7非通電時の第3の動力伝達機構の垂直断面図である。図13はコイル7通電時の第3の動力伝達機構の水平断面図である。図14はコイル7通電時の第3の動力伝達機構の垂直断面図である。第3の動力伝達機構はウォータポンプ1Cで実現されている。ウォータポンプ1Cはプーリ4Aの代わりにプーリ4Cを備えるとともに、スライドプレート5Aの代わりにスライドプレート5Cを備える点と、これに伴いスプリング8の代わりにスプリング9、10を備えるとともに、噛み合い式の動力伝達機構として第1の動力伝達機構の代わりに第3の動力伝達機構を備える点以外、ウォータポンプ1Aと実質的に同一となっている。なお、ボディ2およびシャフト3に関しては実施例2と同様に同一の符号を用いることとしている。
プーリ4Cは駆動側ボール受け部R11の代わりに駆動側ボール受け部R13を備える点と、スプリング10を摺動させるスプリング摺動部がさらに設けられている点以外、プーリ4Aと実質的に同一となっている。スライドプレート5Cは従動側ボール受け部R21の代わりに従動側ボール受け部R23を備える点と、スプリング9を保持するスプリング保持部がさらに設けられている点以外、スライドプレート5Aと実質的に同一となっている。第3の動力伝達機構は駆動側ボール受け部R13それぞれと従動側ボール受け部R23それぞれと複数(ここでは4つ)のボール6とを有して構成されている。
駆動側ボール受け部R13はプーリ4Cの内周部に溝状に設けられている。駆動側ボール受け部R13については後に詳述する。従動側ボール受け部R23はスライドプレート5Cの外周部に部分球状に窪んだ空間を形成するように設けられている。ボール6は従動側ボール受け部R23に保持されるようになっている。従動側ボール受け部R23は周方向に沿って均等に複数(ここでは4つ)設けられている。従動側ボール受け部R23の数とボール6の数とは互いに等しくなっている。
スプリング9はボディ2、スライドプレート5C間に設けられている。スプリング9はプーリ4Cに接近する方向にスライドプレート5Cを駆動する。スプリング9は周方向に沿って均等に複数設けられている。スプリング10はプーリ4C、スライドプレート5C間に設けられている。スプリング10はボディ2に接近する方向にスライドプレート5Cを駆動する。スプリング10はスプリング9それぞれに対応させて周方向に沿って均等に複数設けられている。このため、スプリング9、10の数は互いに等しくなっている。
スプリング10の付勢力はスプリング9の付勢力よりも小さく設定されている。このため、ウォータポンプ1Cではコイル7非通電時に複数のスプリング9が複数のスプリング10の付勢力に抗してスライドプレート5Cをプーリ4C側に駆動する。また、コイル7通電時にコイル7が複数のスプリング10とともに複数のスプリング9の付勢力に抗してスライドプレート5Cをボディ2側に駆動する。複数のスプリング9は駆動部を構成している。
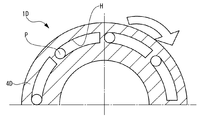
図15は駆動側ボール受け部R13の説明図である。駆動側ボール受け部R13は具体的にはコイル7通電時のスライドプレート5Cの配置に応じた従動側ボール受け部R23に対応させて、プーリ4Cの内周部に一周に亘ってリング状の溝を形成するように設けられている。また、リング状の溝からコイル7非通電時のスライドプレート5Cの配置に応じた従動側ボール受け部R23に対応する位置まで螺旋状に延伸する溝を周方向に沿って均等に複数(ここでは4つ)形成するように設けられている。この螺旋状の溝の数は従動側ボール受け部R23の数およびボール6の数と互いに等しくなっている。
コイル7を非通電にした場合およびコイル7に通電した場合の第3の動力伝達機構の動作は次の通りである。すなわち、コイル7を非通電にした場合には、スプリング9それぞれがスプリング10それぞれの付勢力に抗してスライドプレート5Cをプーリ4C側に駆動する。このとき、プーリ4Cから見て駆動側ボール受け部R13のうち、リング状の溝に沿って空転していたボール6は螺旋状の溝にそれぞれ導かれる。そして、その後螺旋状の溝を奥に向かって進み、溝の終端部に到達する。結果、第3の動力伝達機構が係合状態となる。このとき、ボール6それぞれはプーリ4C、スライドプレート5C間の噛み合いを仲介することで、コイル7の非通電時にプーリ4C、スライドプレート5C間の動力伝達を可能にする。
コイル7に通電した場合には、コイル7がスプリング10それぞれとともにスプリング9それぞれの付勢力に抗してスライドプレート5Cをボディ2側に駆動する。このとき、螺旋状の溝の終端部に当接していたボール6それぞれは螺旋状の溝を入口側に向かって進み、リング状の溝に到達する。そしてこれにより、第3の動力伝達機構の係合状態が解除される結果、プーリ4C、スライドプレート5C間の動力伝達が切断される。
かかるウォータポンプ1Cも噛み合い式の動力伝達機構である第3の動力伝達機構を備えることで、ウォータポンプ1Aの場合と同様の作用効果を得ることができる。また、ボール6それぞれをプーリ4C、スライドプレート5C間の噛み合いの仲介に用いることで、ウォータポンプ1Aの場合と同様の作用効果を奏することができる。
ウォータポンプ1Cはボール6それぞれでプーリ4C、スライドプレート5C間の噛み合いを仲介するにあたって、噛み合い式の動力伝達機構がプーリ4Cに設けられた溝状の駆動側ボール受け部R13と、スライドプレート5Cに設けられ、ボール6を保持する従動側ボール受け部R23とを備えるとともに、駆動側ボール受け部R13が非係合時にボール6それぞれを空転させるリング状の溝と、リング状の溝に連通し、スライドプレート5Cの軸方向に沿った移動に応じてボール6それぞれを個別に案内するとともに、終端部でボール6それぞれに個別に当接する螺旋状の溝とを備える構成となっている。このため、ウォータポンプ1Cは係合時にスライドプレート5Cの回転をプーリ4Cの回転に同期させるようにして、係合時に加わる衝撃を緩和することもできる。
以上、本発明の実施例について詳述したが、本発明はかかる特定の実施例に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
例えば噛み合い式の動力伝達機構は必ずしもボール部を備えていなくてもよい。図16は第1の変形例であるウォータポンプ1Dの水平断面図である。図17は第1の変形例であるウォータポンプ1Dの垂直断面図である。ウォータポンプ1Dはプーリ4Aの代わりにプーリ4Dを備えるとともに、スライドプレート5Aの代わりにスライドプレート5Dを備える点と、ボール6を特段備えていない点以外、ウォータポンプ1Aと実質的に同一となっている。プーリ4Dは駆動側ボール受け部R11の代わりにピン溝部Hを備える点以外、プーリ4Dと実質的に同一となっている。スライドプレート5Dは従動側ボール受け部R21の代わりにピンPを備える点以外、スライドプレート5Aと実質的に同一となっている。
ピン溝部Hはプーリ4Dのうち、スライドプレート5Dと対向する側の部分に設けられている。ピン溝部Hは所定の深さで周方向に沿って円弧状に設けられている。ピン溝部Hの深さ(軸方向に沿った寸法)はピンPの長さよりも大きく設定されている。ピン溝部Hのうち、プーリ4Dの回転方向において後方となる部分は、ピンPに合わせた形状を有している。ピン溝部Hは周方向に沿って均等に複数(ここでは8つ)設けられている。
ピンPはスライドプレート5Dのうち、プーリ4Dと対向する側の部分に設けられている。ピンPはスライドプレート5Dからプーリ4D側に向かって軸方向に沿って延伸するように設けられている。ピンPは先端部が球面状に形成された円柱状の形状を有している。ピンPは周方向に沿って均等に複数(ここでは8つ)設けられている。ピン溝部Hの数とピンPの数とは互いに等しくなっている。
ウォータポンプ1Dでは、噛み合い式の動力伝達機構がボール受け部R11、R21それぞれの代わりにピン溝部HそれぞれとピンPそれぞれとを備えている。この点、かかるウォータポンプ1Dでも、コンパクトで簡素な構造を実現するとともに消費電力の更なる低減を図ることができる。なお、この場合にはピンPの抜き差しに必要なスライドプレート5Dのストロークを確保する必要がある分、コンパクト化に不利となる虞がある。また、係合状態の解除時に係合状態が持続するストロークが長くなる分、消費電力の低減に不利となる虞がある。このほか係合時に加わる衝撃に対し、強度面で不利となる虞がある。
図18は第2の変形例であるウォータポンプ1Eの水平断面図である。ウォータポンプ1Eはプーリ4Aの代わりにプーリ4Eを備えるとともに、スライドプレート5Aの代わりにスライドプレート5Eを備える点と、ボール6を特段備えていない点以外、ウォータポンプ1Aと実質的に同一となっている。プーリ4Eは駆動側ボール受け部R11の代わりに駆動側傘歯部G1を備える点以外、プーリ4Aと実質的に同一となっている。スライドプレート5Eは従動側ボール受け部R21の代わりに従動側傘歯部G2を備える点以外、スライドプレート5Aと実質的に同一となっている。
駆動側傘歯部G1はプーリ4Eのうち、スライドプレート5Eと対向する側の部分に一周に亘って設けられている。駆動側傘歯部G1の歯それぞれは周方向に沿って均等に複数設けられている。従動側傘歯部G2はスライドプレート5Eのうち、プーリ4Eと対向する側の部分に一周に亘って設けられている。従動側傘歯部G2の歯それぞれは周方向に沿って均等に複数設けられている。駆動側傘歯部G1の歯数と従動側傘歯部G2の歯数とは互いに等しくなっている。駆動側傘歯部G1の歯それぞれと従動側傘歯部G2の歯それぞれとはスライドプレート5Eの軸方向に沿った移動に応じて、係合および係合の解除ができるように設けられている。
ウォータポンプ1Eでは、噛み合い式の動力伝達機構がボール受け部R11、R21それぞれの代わりに傘歯部G1、G2を備えている。この点、かかるウォータポンプ1Eでもコンパクトで簡素な構造を実現するとともに、消費電力の更なる低減を図ることができる。但し、この場合には従動側傘歯部G2の抜き差しに必要なスライドプレート5Eのストロークを確保する必要がある分、コンパクト化に不利となる虞がある。また、係合状態の解除に係合状態が持続するストロークが長くなる分、消費電力の低減に不利となる虞がある。このほか係合時に加わる衝撃に対し、例えば歯元において強度面で不利となる虞がある。