JP5669347B2 - 無段変速機 - Google Patents
無段変速機 Download PDFInfo
- Publication number
- JP5669347B2 JP5669347B2 JP2008209690A JP2008209690A JP5669347B2 JP 5669347 B2 JP5669347 B2 JP 5669347B2 JP 2008209690 A JP2008209690 A JP 2008209690A JP 2008209690 A JP2008209690 A JP 2008209690A JP 5669347 B2 JP5669347 B2 JP 5669347B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft
- sensor
- hole
- drive pulley
- continuously variable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images































Landscapes
- Transmissions By Endless Flexible Members (AREA)
Description
前記駆動プーリ部の可動シーブは駆動源側に配置され、前記駆動プーリ部の固定シーブは駆動源から遠い側に配置されており、
前記アクチュエータは、電動モータと、前記電動モータが発生した回転力を伝達する減速機構と、前記減速機構を介して前記電動モータの動力を入力する回転要素と、前記回転要素の回転量に応じて軸線方向に変位する軸線方向変位要素と、一端が前記軸線方向変位要素の軸線直交面に摺動可能に当接し、他端が軸受を保持する軸受ホルダの軸線直交面に摺動可能に当接してなり、該軸受及び該軸受ホルダを介して前記駆動プーリ部の可動シーブを付勢するための部材とを有し、前記軸線方向変位要素の変位に応じて、前記部材が揺動して前記駆動プーリ部の可動シーブを前記駆動プーリ部の固定シーブに対して移動させるようになっており、
前記軸受は、前記駆動プーリ部の可動シーブに内輪を固定し、前記軸受ホルダに外輪を固定してなることを特徴とするVベルト式の無段変速機である。
ていると好ましい。
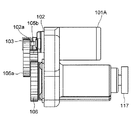
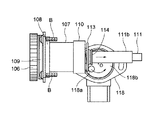
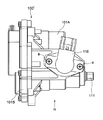
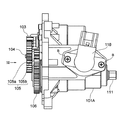
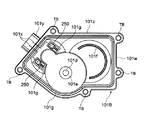
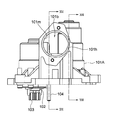
101 ハウジング
101A ハウジング本体
101B カバー部材
101a モータ室
101b ねじ軸室
101d 段部
101e 長孔
101f ストッパ部
101g インロー部
101g 受け部
101h 面取り部
101j ステー
101k ノックピン穴
101k’ ボルト穴
101m 第3の孔
101n 第1の孔
101p 当接部
101q 溝
101r 外周部
101s 段部
101w カバー部
101x 連結部材
101y 連結部
101z カバー部材本体
102 モータ
102a 回転軸
102b 端子
102c ボス
102d 円筒部
102f フランジ部
103 駆動ギヤ
104 中間軸
105a 大ギヤ
105b 小ギヤ
106 従動ギヤ
107 ナット部材
107a 雌ねじ溝
108 玉軸受
109 軸受ホルダ
110 ブッシュ
111 ねじ軸
111a ねじ部
111b 丸軸部
111c 雄ねじ溝
111d 端部
111e 嵌合部
111f 嵌合部
112 ボール
113 センサカラー
114 止め輪
115 ブッシュ
116 シール
117 押圧部材
118 センサ
118a センサアーム
118b 回転板
118c コイルバネ
118d アーム部
118e コネクタ部
118f フランジ部
118g インロー部
119 止め輪
200 駆動プーリ部
201 プーリ軸
201a 雄ねじ部
201b スプライン雄溝
202 玉軸受
203 固定シーブ
203a 円錐面
203b スプライン雌溝
204 ワッシャ
206 スリーブ
206a スプライン雄溝
206 スリーブ
207 可動シーブ
207a 中央筒部
207b 円錐面
207c スプライン雌溝
208 玉軸受
209 軸受ホルダ
209a 円筒部
209b 外フランジ
209c 内フランジ
210 ストッパ
211 ベルト
215 ナット
250 従動プーリ部
253 固定シーブ
257 可動シーブ
300 フォーク部材
301 アーム部
301a 孔
302 架橋部
302a 溝
B ビス
BT ボルト
J 治具
J1 大穴
J2 小穴
OR O−リング
PJ 突出部分
S シャフト
TB チューブ
Claims (7)
- 駆動源に連結された駆動プーリ軸に固定支持された固定シーブ及び前記駆動プーリ軸に沿って軸線方向移動可能に支持された可動シーブとからなる駆動プーリ部と,該駆動プーリ軸に平行に配置されている従動プーリ軸に固定支持された固定シーブ及び前記従動プーリ軸に沿って軸線方向移動可能に支持された可動シーブとからなる従動プーリ部と,前記駆動プーリ部と前記従動プーリ部との間に掛け渡されたVベルトと,前記駆動プーリ部の可動シーブを移動させるための揺動不能に固定されたアクチュエータと,このアクチュエータの動力を前記駆動プーリ部の可動シーブへ伝達する動力伝達部とを備え、
前記駆動プーリ部の可動シーブは駆動源側に配置され、前記駆動プーリ部の固定シーブは駆動源から遠い側に配置されており、
前記アクチュエータは、電動モータと、前記電動モータが発生した回転力を伝達する減速機構と、前記減速機構を介して前記電動モータの動力を入力する回転要素と、前記回転要素の回転量に応じて軸線方向に変位する軸線方向変位要素と、一端が前記軸線方向変位要素の軸線直交面に摺動可能に当接し、他端が軸受を保持する軸受ホルダの軸線直交面に摺動可能に当接してなり、該軸受及び該軸受ホルダを介して前記駆動プーリ部の可動シーブを付勢するための部材とを有し、前記軸線方向変位要素の変位に応じて、前記部材が揺動して前記駆動プーリ部の可動シーブを前記駆動プーリ部の固定シーブに対して移動させるようになっており、
前記軸受は、前記駆動プーリ部の可動シーブに内輪を固定し、前記軸受ホルダに外輪を固定してなることを特徴とする無段変速機。 - 前記アクチュエータは、前記駆動プーリ部の軸線直交方向に見たときに、前記駆動プーリ部と前記従動プーリ部との間に配置されていることを特徴とする請求項1に記載の無段変速機。
- 前記軸線方向変位要素は、前記駆動プーリ軸又は前記従動プーリ軸と平行に配置されていることを特徴とする請求項1又は2に記載の無段変速機。
- 前記アクチュエータは、前記無段変速機を覆っているハウジングに対して外部に設けられていることを特徴とする請求項1〜3のいずれかに記載の無段変速機。
- 前記回転要素はナット又はねじ軸であり、前記軸線方向変位要素はねじ軸又はナットであり、前記ナット及び前記ねじ軸によりボールねじ機構を構成することを特徴とする請求項1〜4のいずれかに記載の無段変速機。
- 前記軸線方向変位要素の軸線方向移動量を検出するセンサを有し、前記センサは、回転式ポテンシヨメータを含むことを特徴とする請求項1〜5のいずれかに記載の無段変速機。
- 前記アクチュエータは、前記電動モータを取り付けたハウジング本体とカバー部材とを含むハウジングと、前記軸線方向変位要素の軸線方向移動量を検出するセンサと、を有し、前記減速機構はギヤを含み、
前記ハウジング本体は、前記ギヤの支持軸を嵌合する第1の孔と、前記軸線方向変位要素を収容する第2の孔とを、それらの軸線が互いに平行になるように形成すると共に、前記センサを取り付けるための第3の孔を、前記第2の孔に対して交差させて形成しており、
前記第1の孔から前記第3の孔まで連通しており、前記第2の孔はシールにより密封され、前記第3の孔は前記センサにより密封されていることを特徴とする請求項1〜6のいずれかに記載の無段変速機。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008209690A JP5669347B2 (ja) | 2007-09-05 | 2008-08-18 | 無段変速機 |
| US12/676,439 US20100184543A1 (en) | 2007-09-05 | 2008-09-05 | Continuously variable transmission, actuator and intermediate terminal |
| CN200880105874A CN101796326A (zh) | 2007-09-05 | 2008-09-05 | 无级变速器、致动器以及中间端子 |
| PCT/JP2008/066125 WO2009031669A1 (ja) | 2007-09-05 | 2008-09-05 | 無段変速機、アクチュエータ及び中間端子 |
| EP08829547.2A EP2187095A4 (en) | 2007-09-05 | 2008-09-05 | CONTINUOUS TRANSMISSION, ACTUATOR AND INTERMEDIATE CONTACT THEREOF |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007230105 | 2007-09-05 | ||
| JP2007230105 | 2007-09-05 | ||
| JP2008209690A JP5669347B2 (ja) | 2007-09-05 | 2008-08-18 | 無段変速機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009079759A JP2009079759A (ja) | 2009-04-16 |
| JP2009079759A5 JP2009079759A5 (ja) | 2011-10-13 |
| JP5669347B2 true JP5669347B2 (ja) | 2015-02-12 |
Family
ID=40654655
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008209690A Expired - Fee Related JP5669347B2 (ja) | 2007-09-05 | 2008-08-18 | 無段変速機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5669347B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5241642B2 (ja) * | 2009-07-30 | 2013-07-17 | 本田技研工業株式会社 | Vベルト式無段変速機 |
| JP5598021B2 (ja) * | 2010-02-26 | 2014-10-01 | 日本精工株式会社 | 無段変速機及びアクチュエータ |
| JP6002614B2 (ja) | 2013-03-29 | 2016-10-05 | 武蔵精密工業株式会社 | Vベルト式無段変速機 |
| ES2564036T3 (es) | 2013-03-29 | 2016-03-17 | Musashi Seimitsu Industry Co., Ltd. | Transmisión de variación continua de correa en V |
| JP6176060B2 (ja) * | 2013-11-04 | 2017-08-09 | 日本精工株式会社 | 電動アクチュエータ |
| JP6461468B2 (ja) | 2013-11-22 | 2019-01-30 | Ntn株式会社 | Vベルト式無段変速機 |
| JP5688482B2 (ja) * | 2014-03-26 | 2015-03-25 | 本田技研工業株式会社 | 無段変速機構造 |
| JP6297016B2 (ja) * | 2015-10-23 | 2018-03-20 | 本田技研工業株式会社 | 作業機用ベルト式無段変速機 |
| CN117704038B (zh) * | 2024-02-06 | 2024-04-09 | 山东欧迈机械股份有限公司 | 一种立式重载不漏油齿轮箱 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5926937U (ja) * | 1982-08-12 | 1984-02-20 | ヤンマー農機株式会社 | コンバインの脱穀駆動装置 |
| US5048302A (en) * | 1990-02-09 | 1991-09-17 | Hudson Associates, Inc. | Refrigerant system having controlled variable speed drive for compressor |
| JPH05931U (ja) * | 1991-06-21 | 1993-01-08 | 株式会社クボタ | エンジンの強制循環式水冷装置 |
| GB9422270D0 (en) * | 1994-11-04 | 1994-12-21 | Hobart Mfg Co | Variable speed food mixer |
| US5552647A (en) * | 1994-04-12 | 1996-09-03 | Systems Analysis And Integration, Inc. | Position-sensing device for power distribution switch |
| US6050379A (en) * | 1998-07-10 | 2000-04-18 | Chrysler Corporation | Algorithm for electro-mechanical clutch actuator |
| JP4410865B2 (ja) * | 1998-10-29 | 2010-02-03 | 東京自動機工株式会社 | 伝達車加圧装置用圧縮装置 |
| JP2003184974A (ja) * | 2001-12-17 | 2003-07-03 | Exedy Corp | 無段変速装置の電動アクチュエータ |
-
2008
- 2008-08-18 JP JP2008209690A patent/JP5669347B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009079759A (ja) | 2009-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5669347B2 (ja) | 無段変速機 | |
| EP2187095A1 (en) | Continuously variable transmission, actuator, and intermediate terminal | |
| CN113037020B (zh) | 旋转驱动装置及使用它的线控换挡系统 | |
| US7161751B2 (en) | Optical module and camera module | |
| US6242824B1 (en) | Motor and manufacturing method thereof | |
| EP1701063B1 (en) | Linear actuator | |
| US11049634B2 (en) | Electromagnetic actuator and connection/disconnection apparatus | |
| KR19990028946A (ko) | 유성치차 변속기 | |
| JP5772899B2 (ja) | 電磁アクチュエータ | |
| US20050233841A1 (en) | Belt-type continuously-variable transmission | |
| CN111828554B (zh) | 旋转致动器 | |
| US8267236B2 (en) | Electromagnetic clutch | |
| EP2500694A2 (en) | Rotational position detecting device and transmission actuating device equipped with the same | |
| JP2011010537A (ja) | 歯車装置及び減速機付モータ | |
| WO2023026808A1 (ja) | ボールねじ装置およびその製造方法 | |
| JP5093156B2 (ja) | 回転式アクチュエータ | |
| JP5321949B2 (ja) | アクチュエータ及び中間端子 | |
| US20020088305A1 (en) | Indexing apparatus and method of assembling the same | |
| US11718206B2 (en) | Seat reclining apparatus and method for manufacturing seat reclining apparatus | |
| US20040166983A1 (en) | Planetary gear type electro-magnetic clutch | |
| US6491130B1 (en) | Electric power steering apparatus | |
| KR102288868B1 (ko) | 기어 모터 | |
| JP2020118179A (ja) | モータ | |
| JP3238639B2 (ja) | 電動スクリュドライバのサイレントクラッチ | |
| CN216200195U (zh) | 电动致动器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110812 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110812 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110831 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130404 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130603 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130822 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131122 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20131202 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20140207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141104 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141216 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5669347 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |