JP5656013B2 - エンジン自動停止始動制御装置 - Google Patents
エンジン自動停止始動制御装置 Download PDFInfo
- Publication number
- JP5656013B2 JP5656013B2 JP2010265000A JP2010265000A JP5656013B2 JP 5656013 B2 JP5656013 B2 JP 5656013B2 JP 2010265000 A JP2010265000 A JP 2010265000A JP 2010265000 A JP2010265000 A JP 2010265000A JP 5656013 B2 JP5656013 B2 JP 5656013B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- rotational speed
- pinion
- rotation speed
- ring gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits specially adapted for starting of engines
- F02N11/0851—Circuits specially adapted for starting of engines characterised by means for controlling the engagement or disengagement between engine and starter, e.g. meshing of pinion and engine gear
- F02N11/0855—Circuits specially adapted for starting of engines characterised by means for controlling the engagement or disengagement between engine and starter, e.g. meshing of pinion and engine gear during engine shutdown or after engine stop before start command, e.g. pre-engagement of pinion
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits specially adapted for starting of engines
- F02N11/0814—Circuits specially adapted for starting of engines comprising means for controlling automatic idle-start-stop
- F02N11/0818—Conditions for starting or stopping the engine or for deactivating the idle-start-stop mode
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits specially adapted for starting of engines
- F02N11/0814—Circuits specially adapted for starting of engines comprising means for controlling automatic idle-start-stop
- F02N11/0844—Circuits specially adapted for starting of engines comprising means for controlling automatic idle-start-stop with means for restarting the engine directly after an engine stop request, e.g. caused by change of driver mind
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits specially adapted for starting of engines
- F02N11/0859—Circuits specially adapted for starting of engines specially adapted to the type of the starter motor or integrated into it
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N2200/00—Parameters used for control of starting apparatus
- F02N2200/02—Parameters used for control of starting apparatus said parameters being related to the engine
- F02N2200/022—Engine speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N2300/00—Control related aspects of engine starting
- F02N2300/20—Control related aspects of engine starting characterised by the control method
- F02N2300/2006—Control related aspects of engine starting characterised by the control method using prediction of future conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N99/00—Subject matter not provided for in the other groups of this subclass
- F02N99/002—Starting combustion engines by ignition means
- F02N99/006—Providing a combustible mixture inside the cylinder
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
Description
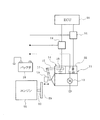
まず、図1に基づいてエンジン始動制御システムの概略構成を説明する。
スタータ11は、いわゆるピニオン押し出し式スタータであり、モータ12と、このモータ12によって回転駆動されるピニオン13と、このピニオン13を押し出す電磁アクチュエータ14等を備えた構成となっている。ピニオン13は、軸方向に移動可能に設けられている。電磁アクチュエータ14には、プランジャ15と、このプランジャ15を駆動するソレノイド16が設けられ、プランジャ15の駆動力がレバー17等を介してピニオン13に伝達されるようになっている。
図2のタイムチャートに示すように、エンジン運転中にエンジン自動停止要求が発生すると、エンジン21の燃焼が停止されてエンジン21が自動停止される。
本実施例5では、上記各実施例1〜4のいずれかのエンジン21の再始動制御を実行するシステムにおいて、ECU20は、エンジン21の自動停止によりエンジン回転速度が降下する軌道(以下「エンジン回転降下軌道」という)を予測する回転降下軌道予測手段として機能し、更に、そのエンジン回転降下軌道の予測データ(エンジン回転速度の予測値)に基づいて第1〜第4の回転速度領域や待機回転速度領域を判定すると共にピニオン13の駆動タイミングとモータ12の駆動タイミングを決定する制御手段としても機能する。
以下の説明では、クランクパルスが30℃A毎に出力されるクランク角センサ(図示せず)を用いた例を説明する。これにより、エンジン自動停止時に、エンジン回転速度が降下する期間に、クランク角センサからクランクパルスがECU20に入力される30℃A毎に次式により角速度ω[rad/sec]を算出する。
ω=30×2π/(360×tp )
tp :クランクパルス間隔[sec]
T[30-60,i-1] =−J・(ω[60,i-1]2 −ω[30,i-1]2 )/2
T[60-90,i-1] =−J・(ω[90,i-1]2 −ω[60,i-1]2 )/2
T[90-120,i-1]=−J・(ω[120,i-1] 2 −ω[90,i-1]2 )/2
T[120-150,i-1] =−J・(ω[150,i-1] 2 −ω[120,i-1] 2 )/2
T[150-0,i-1] =−J・(ω[0,i] 2 −ω[150,i-1] 2 )/2
そして、今回の180℃A区間[i] のTDC後の30℃A(現時点)で、角速度ω[30,i]を算出すると共に、ロストルクT[0-30,i]を同様に算出し、このロストルクT[0-30,i]をレジスタに更新記憶する。
ω=30×2π/(360×tp )
tp :クランクパルス間隔[sec]
その他、本発明は、エンジン始動制御システムの構成を適宜変更しても良い等、要旨を逸脱しない範囲で種々変更して実施できる。
Claims (18)
- ピニオンを回転駆動するモータと、前記ピニオンをエンジンのクランク軸に連結されたリングギヤに噛み合わせるアクチュエータとを個別に作動可能なスタータを備え、エンジン自動停止要求が発生したときにエンジンを自動停止させ、エンジン再始動要求が発生したときにエンジンを再始動させるエンジン自動停止始動制御装置において、
前記エンジンの自動停止によりエンジン回転速度が降下するエンジン回転降下期間中に前記エンジン回転速度が第1の回転速度よりも高い第1の回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに燃料噴射を再開して前記エンジンを再始動させる第1の再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第1の回転速度以下で第2の回転速度よりも高い第2の回転速度領域で前記エンジン再始動要求が発生したときに、前記モータにより前記ピニオンの回転速度を同期させた後に前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせて前記スタータによるクランキングを開始して前記エンジンを再始動させる第2の再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第2の回転速度以下で且つ50〜450rpmの範囲内に設定された第3の回転速度よりも高い待機回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに、その後、前記エンジン回転速度が前記第3の回転速度以下の第3の回転速度領域になったときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせた後又はその噛み合わせの途中に前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる待機再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第3の回転速度以下の第3の回転速度領域で前記エンジン再始動要求が発生したときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせた後又はその噛み合わせの途中に前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる第3の再始動制御手段と
を備えていることを特徴とするエンジン自動停止始動制御装置。 - ピニオンを回転駆動するモータと、前記ピニオンをエンジンのクランク軸に連結されたリングギヤに噛み合わせるアクチュエータとを個別に作動可能なスタータを備え、エンジン自動停止要求が発生したときにエンジンを自動停止させ、エンジン再始動要求が発生したときにエンジンを再始動させるエンジン自動停止始動制御装置において、
前記エンジンの自動停止によりエンジン回転速度が降下するエンジン回転降下期間中に前記エンジン回転速度が第1の回転速度以下で第2の回転速度よりも高い第2の回転速度領域で前記エンジン再始動要求が発生したときに、前記モータにより前記ピニオンの回転速度を前記リングギヤの回転速度に同期させた後に前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせて前記スタータによるクランキングを開始して前記エンジンを再始動させる第2の再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第2の回転速度以下で且つ50〜450rpmの範囲内に設定された第3の回転速度よりも高い待機回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに、その後、前記エンジン回転速度が前記第3の回転速度以下の第3の回転速度領域になったときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせた後又はその噛み合わせの途中に前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる待機再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第3の回転速度以下の第3の回転速度領域で前記エンジン再始動要求が発生したときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせた後又はその噛み合わせの途中に前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる第3の再始動制御手段と
を備えていることを特徴とするエンジン自動停止始動制御装置。 - 前記第2の再始動制御手段は、前記リングギヤの回転速度と前記ピニオンの回転速度との回転速度差が±200rpmの範囲内になったときに前記ピニオンの回転速度が前記リングギヤの回転速度に同期したと判断する手段を有することを特徴とする請求項1又は2に記載のエンジン自動停止始動制御装置。
- 前記第2の再始動制御手段は、前記リングギヤのピッチ円上の周速度と前記ピニオンのピッチ円上の周速度との周速度差が±3.1m/秒の範囲内になったときに前記ピニオンの回転速度が前記リングギヤの回転速度に同期したと判断する手段を有することを特徴とする請求項1又は2に記載のエンジン自動停止始動制御装置。
- 前記スタータには、エンジン回転方向において前記ピニオンから前記モータへ動力を伝達しないワンウエイクラッチが設けられ、
前記第2の再始動制御手段は、前記リングギヤの回転速度が前記ピニオンの回転速度よりも高く且つ前記リングギヤの回転速度と前記ピニオンの回転速度との回転速度差が所定値以下になったときに前記ピニオンの回転速度が前記リングギヤの回転速度に同期したと判断する手段を有することを特徴とする請求項1又は2に記載のエンジン自動停止始動制御装置。 - 前記所定値は、300rpm以下の値に設定されていることを特徴とする請求項5に記載のエンジン自動停止始動制御装置。
- 前記所定値は、200rpmに設定されていることを特徴とする請求項5に記載のエンジン自動停止始動制御装置。
- 前記スタータには、エンジン回転方向において前記ピニオンから前記モータへ動力を伝達しないワンウエイクラッチが設けられ、
前記第2の再始動制御手段は、前記リングギヤのピッチ円上の周速度が前記ピニオンのピッチ円上の周速度よりも高く且つ前記リングギヤのピッチ円上の周速度と前記ピニオンのピッチ円上の周速度との周速度差が3.1m/秒の範囲内になったときに前記ピニオンの回転速度が前記リングギヤの回転速度に同期したと判断する手段を有することを特徴とする請求項1又は2に記載のエンジン自動停止始動制御装置。 - ピニオンを回転駆動するモータと、前記ピニオンをエンジンのクランク軸に連結されたリングギヤに噛み合わせるアクチュエータとを個別に作動可能なスタータを備え、エンジン自動停止要求が発生したときにエンジンを自動停止させ、エンジン再始動要求が発生したときにエンジンを再始動させるエンジン自動停止始動制御装置において、
前記エンジンの自動停止によりエンジン回転速度が降下するエンジン回転降下期間中に前記エンジン回転速度が第1の回転速度よりも高い第1の回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに燃料噴射を再開して前記エンジンを再始動させる第1の再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第1の回転速度以下で第2の回転速度よりも高い待機回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに、その後、前記エンジン回転速度が前記第2の回転速度以下で且つ50〜450rpmの範囲内に設定された第3の回転速度よりも高い第2の回転速度領域になったときに、前記モータにより前記ピニオンの回転速度を前記リングギヤの回転速度に同期させた後に前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせて前記スタータによるクランキングを開始して前記エンジンを再始動させる待機再始動制御手段と
を備えていることを特徴とするエンジン自動停止始動制御装置。 - 前記第3の回転速度は、50〜450rpmの範囲内に設定されていることを特徴とする請求項1乃至9のいずれかに記載のエンジン自動停止始動制御装置。
- 前記第2の回転速度は、前記第3の回転速度よりも50〜150rpm高い回転速度に設定されていることを特徴とする請求項10に記載のエンジン自動停止始動制御装置。
- ピニオンを回転駆動するモータと、前記ピニオンをエンジンのクランク軸に連結されたリングギヤに噛み合わせるアクチュエータとを個別に作動可能なスタータを備え、エンジン自動停止要求が発生したときにエンジンを自動停止させ、エンジン再始動要求が発生したときにエンジンを再始動させるエンジン自動停止始動制御装置において、
前記エンジンの自動停止によりエンジン回転速度が降下するエンジン回転降下期間中に前記エンジン回転速度が第1の回転速度よりも高い第1の回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに燃料噴射を再開して前記エンジンを再始動させる第1の再始動制御手段と、
前記エンジン回転降下期間中に前記エンジン回転速度が前記第1の回転速度以下で且つ50〜450rpmの範囲内に設定された第3の回転速度よりも高い待機回転速度領域で前記エンジン再始動要求が発生したときに、前記スタータによるクランキングを行わずに、その後、前記エンジン回転速度が前記第3の回転速度以下の第3の回転速度領域になったときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせた後又はその噛み合わせの途中に前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる待機再始動制御手段と
を備えていることを特徴とするエンジン自動停止始動制御装置。 - 前記第1の回転速度は、300〜700rpmの範囲内に設定されていることを特徴とする請求項12に記載のエンジン自動停止始動制御装置。
- 前記エンジン回転降下期間中に前記エンジン回転速度が0となる直前の所定回転速度まで低下したときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせて、その後、前記エンジン再始動要求が発生したときに、前記モータにより前記ピニオンを回転させて前記スタータによるクランキングを開始して前記エンジンを再始動させる第4の再始動制御手段を備えていることを特徴とする請求項1乃至13のいずれかに記載のエンジン自動停止始動制御装置。
- 前記第4の再始動制御手段は、前記エンジン回転降下期間中に前記エンジン回転速度が0となる直前の所定回転速度まで低下したときに、前記アクチュエータにより前記ピニオンを前記リングギヤに噛み合わせるように前記アクチュエータの通電をオンし、該アクチュエータの通電をオンしてから所定時間が経過したとき又は前記ピニオンと前記リングギヤとの噛合を確認したときに、前記アクチュエータの通電をオフにする手段を有することを特徴とする請求項14に記載のエンジン自動停止始動制御装置。
- 前記エンジン自動停止要求の発生又は前記エンジンの燃焼停止からの経過時間に基づいて前記エンジン回転速度を推定する手段を備えていることを特徴とする請求項1乃至15のいずれかに記載のエンジン自動停止始動制御装置。
- 前記モータの通電時間と通電電流のうちの少なくとも一方に基づいて前記ピニオンの回転速度を推定する手段を備えていることを特徴とする請求項1乃至16のいずれかに記載のエンジン自動停止始動制御装置。
- 前記エンジンの自動停止によりエンジン回転速度が降下する軌道(以下「エンジン回転降下軌道」という)を予測する回転降下軌道予測手段と、
前記回転降下軌道予測手段によるエンジン回転降下軌道の予測データに基づいて前記待機回転速度領域を判定すると共に前記ピニオンの駆動タイミングと前記モータの駆動タイミングを決定する制御手段と
を備えていることを特徴とする請求項1乃至17のいずれかに記載のエンジン自動停止始動制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010265000A JP5656013B2 (ja) | 2010-01-11 | 2010-11-29 | エンジン自動停止始動制御装置 |
| US12/978,856 US8793061B2 (en) | 2010-01-11 | 2010-12-27 | Control device for controlling automatic engine stop and start |
| DE102011000006A DE102011000006A1 (de) | 2010-01-11 | 2011-01-03 | Steuervorrichtung zum Steuern eines automatischen Maschinenstopps und -starts |
| CN201110041777.9A CN102135027B (zh) | 2010-01-11 | 2011-01-11 | 控制自动发动机停止和起动的控制设备 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010003512 | 2010-01-11 | ||
| JP2010003512 | 2010-01-11 | ||
| JP2010265000A JP5656013B2 (ja) | 2010-01-11 | 2010-11-29 | エンジン自動停止始動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011157958A JP2011157958A (ja) | 2011-08-18 |
| JP5656013B2 true JP5656013B2 (ja) | 2015-01-21 |
Family
ID=44259183
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010265000A Active JP5656013B2 (ja) | 2010-01-11 | 2010-11-29 | エンジン自動停止始動制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8793061B2 (ja) |
| JP (1) | JP5656013B2 (ja) |
| CN (1) | CN102135027B (ja) |
| DE (1) | DE102011000006A1 (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008040945B4 (de) * | 2008-08-01 | 2019-08-14 | Seg Automotive Germany Gmbh | Verfahren zum Einspuren eines Andrehritzels einer Startvorrichtung in einen Zahnkranz einer Brennkraftmaschine |
| JP4835774B2 (ja) * | 2009-09-04 | 2011-12-14 | 株式会社デンソー | エンジン停止始動制御装置 |
| US8251034B2 (en) * | 2009-12-15 | 2012-08-28 | GM Global Technology Operations LLC | Control of a pre-spun starter |
| DE102010040562B4 (de) * | 2010-09-10 | 2022-02-03 | Robert Bosch Gmbh | Verfahren zum Wiederstart einer Brennkraftmaschine |
| US8666574B2 (en) * | 2011-04-21 | 2014-03-04 | Deere & Company | In-vehicle estimation of electric traction motor performance |
| DE102011088106B4 (de) * | 2011-12-09 | 2021-07-01 | Robert Bosch Gmbh | Schneller Neustart im Motorauslauf mit konventionellen Startern |
| DE102011090149A1 (de) * | 2011-12-30 | 2013-07-04 | Robert Bosch Gmbh | Verfahren zur Ansteuerung eines Organs im Luftzufuhrtrakt einer Brennkraftmaschine, insbesondere einer Drosselklappe |
| US8829845B2 (en) * | 2012-02-28 | 2014-09-09 | Remy Technologies, Llc | Starter machine system and method |
| JP5777542B2 (ja) * | 2012-02-29 | 2015-09-09 | 日立オートモティブシステムズ株式会社 | 内燃機関のアイドルストップ制御装置 |
| US8977449B2 (en) | 2012-05-04 | 2015-03-10 | Ford Global Technologies, Llc | Methods and systems for holding a vehicle stopped on a hill |
| US9827975B2 (en) | 2012-05-04 | 2017-11-28 | Ford Global Technologies, Llc | Methods and systems for improving transmission shifting |
| US9656665B2 (en) | 2012-05-04 | 2017-05-23 | Ford Global Technologies, Llc | Methods and systems for a driveline dual mass flywheel |
| US8924061B2 (en) | 2012-05-04 | 2014-12-30 | Ford Global Technologies, Llc | Methods and systems for launching a vehicle |
| US9108614B2 (en) | 2012-05-04 | 2015-08-18 | Ford Global Technologies, Llc | Methods and systems for adapting a driveline disconnect clutch transfer function |
| US9108632B2 (en) | 2012-05-04 | 2015-08-18 | Ford Global Technologies, Llc | Methods and systems for operating a driveline clutch |
| US9115682B2 (en) | 2012-05-04 | 2015-08-25 | Ford Global Technologies, Llc | Methods and systems for operating a driveline disconnect clutch |
| US8932179B2 (en) | 2012-05-04 | 2015-01-13 | Ford Global Technologies, Llc | Methods and systems for transitioning between braking modes |
| US9322380B2 (en) | 2012-05-04 | 2016-04-26 | Ford Global Technologies, Llc | Methods and systems for engine starting during a shift |
| US8894541B2 (en) | 2012-05-04 | 2014-11-25 | Ford Global Technologies, Llc | Methods and systems for a vehicle driveline control during varying driving conditions |
| US9068546B2 (en) | 2012-05-04 | 2015-06-30 | Ford Global Technologies, Llc | Methods and systems for engine cranking |
| US9447747B2 (en) * | 2012-05-04 | 2016-09-20 | Ford Global Technologies, Llc | Methods and systems for stopping an engine |
| US8998771B2 (en) | 2012-05-04 | 2015-04-07 | Ford Global Technologies, Llc | Methods and systems for a vehicle driveline |
| US9156469B2 (en) | 2012-05-04 | 2015-10-13 | Ford Global Technologies, Llc | Methods and systems for a driveline disconnect clutch |
| US8965616B2 (en) | 2012-05-04 | 2015-02-24 | Ford Global Technologies, Llc | Methods and systems for reducing gear lash noise |
| US8938327B2 (en) | 2012-05-04 | 2015-01-20 | Ford Global Technologies, Llc | Methods and systems for transitioning between driveline braking modes |
| US9393954B2 (en) | 2012-05-04 | 2016-07-19 | Ford Global Technologies, Llc | Methods and systems for engine stopping |
| US11084485B2 (en) | 2012-07-24 | 2021-08-10 | Magna Steyr Fahrzeugtechnik Ag & Co Kg | Method for operating a hybrid vehicle |
| EP2689981B1 (de) * | 2012-07-24 | 2017-09-20 | MAGNA STEYR Engineering AG & Co KG | Betriebsstrategie für das Leistungsmanagement eines Elektrofahrzeuges bei VKM Start Anforderung eines Range Extenders |
| JP5644843B2 (ja) * | 2012-11-21 | 2014-12-24 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5910476B2 (ja) * | 2012-12-06 | 2016-04-27 | 株式会社デンソー | エンジン始動装置 |
| CN105190115B (zh) * | 2013-04-01 | 2017-03-22 | 本田技研工业株式会社 | 车辆用动力传递装置 |
| DE112013007073B4 (de) * | 2013-05-15 | 2020-09-03 | Mitsubishi Electric Corporation | Automatische Stopp- und Neustartvorrichtung für einen Innenverbrennungsmotor |
| US9393950B2 (en) * | 2013-07-22 | 2016-07-19 | Ford Global Technologies, Llc | Methods and systems for restarting an engine |
| US9227630B2 (en) * | 2014-02-17 | 2016-01-05 | Ford Global Technologies, Llc | Smoothing hybrid vehicle engine shutdown |
| JP6547676B2 (ja) * | 2016-05-12 | 2019-07-24 | 株式会社デンソー | エンジンの始動制御システム |
| US10480476B2 (en) * | 2018-04-24 | 2019-11-19 | GM Global Technology Operations LLC | Starter system and method of control |
| US10677212B2 (en) * | 2018-05-01 | 2020-06-09 | GM Global Technology Operations LLC | Method and apparatus for controlled stopping of internal combustion engine |
| JP7156830B2 (ja) * | 2018-06-14 | 2022-10-19 | 株式会社Subaru | 車両の制御装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4321796B2 (ja) | 2000-08-10 | 2009-08-26 | 株式会社デンソー | スタータ制御方法 |
| JP4211208B2 (ja) * | 2000-08-23 | 2009-01-21 | トヨタ自動車株式会社 | 燃料消費節約型自動車 |
| US7134414B2 (en) * | 2003-02-10 | 2006-11-14 | Robert Bosch Gmbh | Method and device for starting an internal combustion engine |
| JP3945442B2 (ja) * | 2003-03-31 | 2007-07-18 | マツダ株式会社 | エンジンの始動装置 |
| JP4214401B2 (ja) * | 2004-05-18 | 2009-01-28 | 株式会社デンソー | エンジン自動停止再始動装置 |
| JP2006029247A (ja) * | 2004-07-20 | 2006-02-02 | Denso Corp | エンジンの停止始動制御装置 |
| JP4415841B2 (ja) * | 2004-12-07 | 2010-02-17 | マツダ株式会社 | 4サイクルエンジンの始動装置 |
| JP4453536B2 (ja) * | 2004-12-10 | 2010-04-21 | トヨタ自動車株式会社 | 駆動装置およびこれを搭載する自動車並びに駆動装置の制御方法 |
| JP4466443B2 (ja) * | 2005-03-31 | 2010-05-26 | マツダ株式会社 | 車両のエンジン始動装置 |
| DE102006011644A1 (de) * | 2006-03-06 | 2007-09-13 | Robert Bosch Gmbh | Vorrichtung mit einem ersten Getriebeteil zum Einspuren in ein zweites Getriebeteil, insbesondere Startvorrichtung mit einem Ritzel zum Einspuren in einen Zahnkranz einer Brennkraftmaschine sowie Verfahren zum Betrieb einer derartigen Vorrichtung |
| JP2008121648A (ja) * | 2006-11-16 | 2008-05-29 | Hitachi Ltd | 内燃機関の制御装置 |
| JP2009036115A (ja) * | 2007-08-02 | 2009-02-19 | Mazda Motor Corp | 車両用エンジンの制御装置 |
| JP2009221926A (ja) * | 2008-03-14 | 2009-10-01 | Toyota Motor Corp | 内燃機関の始動制御装置 |
| JP5139167B2 (ja) | 2008-06-19 | 2013-02-06 | トヨタ自動車株式会社 | 電池パックのリサイクル方法および電池パックのリサイクル装置 |
| JP5007839B2 (ja) * | 2008-09-02 | 2012-08-22 | 株式会社デンソー | エンジン自動停止始動制御装置 |
| JP4737571B2 (ja) * | 2008-09-08 | 2011-08-03 | 株式会社デンソー | エンジン始動装置 |
| EP2211051B8 (en) * | 2009-01-21 | 2019-09-11 | Denso Corporation | System for restarting internal combustion engine |
| DE102010061084A1 (de) * | 2009-12-08 | 2011-07-21 | DENSO CORPORATION, Aichi-pref. | System zum Ankurbeln einer internen Verbrennungsmaschine durch in Eingriff bringen von einem Ritzel mit einem Zahnkranz |
| JP5094889B2 (ja) * | 2010-01-14 | 2012-12-12 | 日立オートモティブシステムズ株式会社 | 燃料消費節約型車両制御装置 |
| US8510019B2 (en) * | 2010-01-20 | 2013-08-13 | Denso Corporation | Control device of automatic engine stop and start |
| JP5025752B2 (ja) * | 2010-03-30 | 2012-09-12 | 三菱電機株式会社 | 内燃機関の自動停止・再始動装置 |
| JP5464095B2 (ja) * | 2010-08-02 | 2014-04-09 | 株式会社デンソー | エンジン停止始動制御装置 |
| JP5236044B2 (ja) * | 2011-05-11 | 2013-07-17 | 三菱電機株式会社 | 内燃機関の自動停止再始動装置 |
-
2010
- 2010-11-29 JP JP2010265000A patent/JP5656013B2/ja active Active
- 2010-12-27 US US12/978,856 patent/US8793061B2/en active Active
-
2011
- 2011-01-03 DE DE102011000006A patent/DE102011000006A1/de not_active Withdrawn
- 2011-01-11 CN CN201110041777.9A patent/CN102135027B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011000006A1 (de) | 2011-09-01 |
| US8793061B2 (en) | 2014-07-29 |
| CN102135027A (zh) | 2011-07-27 |
| US20110172901A1 (en) | 2011-07-14 |
| JP2011157958A (ja) | 2011-08-18 |
| CN102135027B (zh) | 2014-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5656013B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5007839B2 (ja) | エンジン自動停止始動制御装置 | |
| JP4835774B2 (ja) | エンジン停止始動制御装置 | |
| JP5392280B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5464095B2 (ja) | エンジン停止始動制御装置 | |
| JP5447298B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5321524B2 (ja) | エンジン自動停止始動制御装置 | |
| JP2011169248A (ja) | スタータの制御装置 | |
| CN102597490B (zh) | 发动机起动装置 | |
| JP5428765B2 (ja) | 内燃機関の自動停止始動制御装置 | |
| JP4735737B2 (ja) | エンジン停止始動制御装置 | |
| JP5007765B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5353721B2 (ja) | エンジン停止始動制御装置 | |
| JP6076485B2 (ja) | エンジン自動停止再始動装置 | |
| JP2011190799A (ja) | エンジン停止始動制御装置 | |
| JP2012102620A (ja) | 車両の制御装置 | |
| JP5370173B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5561128B2 (ja) | エンジン自動停止始動制御装置 | |
| JP5240262B2 (ja) | エンジンの自動停止始動制御装置 | |
| JP2013047466A (ja) | アイドルストップ車両のエンジン自動再始動装置 | |
| JP5724238B2 (ja) | エンジン停止始動制御装置 | |
| JP2015055217A (ja) | アイドリングストップ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131107 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140411 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141003 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20141010 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141029 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141111 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5656013 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |