JP5599039B2 - 像ブレ補正機能付き光学装置 - Google Patents
像ブレ補正機能付き光学装置 Download PDFInfo
- Publication number
- JP5599039B2 JP5599039B2 JP2010125856A JP2010125856A JP5599039B2 JP 5599039 B2 JP5599039 B2 JP 5599039B2 JP 2010125856 A JP2010125856 A JP 2010125856A JP 2010125856 A JP2010125856 A JP 2010125856A JP 5599039 B2 JP5599039 B2 JP 5599039B2
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- angle
- blur correction
- image blur
- sensors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B5/02—Lateral adjustment of lens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
Description
この問題を解決するため、異なる特性を持つ複数の角速度センサの出力を合成して角速度を取得したり、異なる特性を持つ複数の角速度センサを撮影モードに応じて、切替えて使用する、といった方法が提案されている(特許文献1,2)。
そこで、本発明の例示的な目的は、角速度センサのノイズに起因した映像揺れ量を低減した像ブレ補正機能を有する光学装置を提供することにある。
前記角度演算手段は、前記方向判定手段から得られた2つ以上の方向が異なる方向を含む場合には、角速度出力を「0」として角度を算出し、前記2つ以上の方向の全てが同一の方向であった場合には、最も角速度の絶対値が小さい角速度センサの出力を用いて角度を算出することを特徴とする。
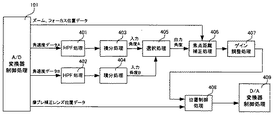
図1は、本実施例のズームレンズ装置の構成を示したものである。

垂直方向の像ブレ補正処理は、水平方向の像ブレ補正処理とほぼ同様であるため、説明は省略する。
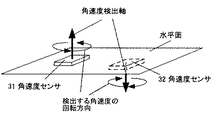
実施例1におけるズームレンズ装置50の構成、及び、振動検出部19,20の構成、角速度センサ30、31、35,36の配置は参考例1で説明した図1〜4と同様であるため、説明は省略する。
参考例2におけるズームレンズ装置50の構成、及び、振動検出部19、20の構成は参考例1で説明した図1,2と同様であるため、説明は省略する。
15 垂直駆動モータ
16 水平駆動モータ
17 水平位置検出器
18 垂直位置検出器
19 水平振動検出部
20 垂直振動検出部
23 像ブレ補正レンズ駆動回路
26 CPU
31、32、35、36 角速度センサ
Claims (2)
- 結像する位置を光軸に垂直な方向に変位させる手段と、
ズームレンズ装置の角速度を検出する2つ以上の角速度センサであって、該2つ以上の角速度センサは角速度を検出する軸が互いに平行であり、同じ振動周波数特性を有する、2つ以上の角速度センサと、
前記2つ以上の角速度センサの出力から1つの角度を算出する角度演算手段と、
前記角度演算手段によって演算された角度に応じて、結像する位置を光軸に垂直な方向に変位させる前記手段を駆動する駆動手段と、
を有し、
前記角度演算手段は、前記2つ以上の角速度センサのそれぞれの出力の方向を判定する方向判定手段を有し、
前記角度演算手段は、前記方向判定手段から得られた2つ以上の方向が異なる方向を含む場合には、角速度出力を「0」として角度を算出し、前記2つ以上の方向の全てが同一の方向であった場合には、最も角速度の絶対値が小さい角速度センサの出力を用いて角度を算出する、
ことを特徴とする光学装置。 - 前記2つ以上の角速度センサは、互いに角速度を検出する軸が180度反転して配置された2つの角速度センサで構成され、前記角度演算手段は一方の角速度センサの出力を反転させた後に処理することを特徴とする請求項1に記載の光学装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010125856A JP5599039B2 (ja) | 2010-06-01 | 2010-06-01 | 像ブレ補正機能付き光学装置 |
| EP11167395.0A EP2393279B1 (en) | 2010-06-01 | 2011-05-25 | Optical apparatus having image shake correcting function |
| CN201110139330.5A CN102269912B (zh) | 2010-06-01 | 2011-05-27 | 具有图像抖动校正功能的光学装置 |
| US13/117,735 US8809757B2 (en) | 2010-06-01 | 2011-05-27 | Optical apparatus having image shake correcting function including angular velocity sensors |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010125856A JP5599039B2 (ja) | 2010-06-01 | 2010-06-01 | 像ブレ補正機能付き光学装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011253004A JP2011253004A (ja) | 2011-12-15 |
| JP2011253004A5 JP2011253004A5 (ja) | 2013-07-04 |
| JP5599039B2 true JP5599039B2 (ja) | 2014-10-01 |
Family
ID=44508695
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010125856A Expired - Fee Related JP5599039B2 (ja) | 2010-06-01 | 2010-06-01 | 像ブレ補正機能付き光学装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8809757B2 (ja) |
| EP (1) | EP2393279B1 (ja) |
| JP (1) | JP5599039B2 (ja) |
| CN (1) | CN102269912B (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5797570B2 (ja) * | 2012-01-19 | 2015-10-21 | Hoya株式会社 | 光学要素の位置制御装置 |
| KR101740538B1 (ko) * | 2016-05-30 | 2017-06-08 | (주)다음기술단 | 사이드 스캔 소나의 영상 흔들림 보정 방법 |
| JP6792467B2 (ja) * | 2017-01-30 | 2020-11-25 | Kyb株式会社 | 信号処理装置 |
| JP2018109776A (ja) * | 2018-02-15 | 2018-07-12 | 株式会社ニコン | ブレ補正装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5790490A (en) * | 1996-05-10 | 1998-08-04 | Olympus Optical Co., Ltd. | Anti-shake camera |
| JP3363862B2 (ja) * | 1999-01-22 | 2003-01-08 | キヤノン株式会社 | ジャイロ、それを備えたカメラ、レンズ及び自動車 |
| JP4311013B2 (ja) * | 2002-12-25 | 2009-08-12 | 株式会社ニコン | ブレ補正カメラシステム及びブレ補正カメラ |
| JP2004301512A (ja) | 2003-03-28 | 2004-10-28 | Denso Corp | 角速度センサ装置 |
| JP4487246B2 (ja) | 2004-05-11 | 2010-06-23 | フジノン株式会社 | 像振れ補正装置 |
| JP2006178192A (ja) * | 2004-12-22 | 2006-07-06 | Canon Inc | 撮像装置 |
| JP4586534B2 (ja) * | 2004-12-28 | 2010-11-24 | セイコーエプソン株式会社 | 撮像装置、手ブレ補正装置、携帯電話機および手ブレ補正方法 |
| JP2006292845A (ja) | 2005-04-06 | 2006-10-26 | Canon Inc | 撮像装置 |
| JP2007127754A (ja) * | 2005-11-02 | 2007-05-24 | Nikon Corp | 像振れ補正装置、光学装置、交換レンズ、及びカメラシステム |
| JP2007164040A (ja) * | 2005-12-16 | 2007-06-28 | Nikon Corp | 像振れ補正装置 |
| JP2009008936A (ja) * | 2007-06-28 | 2009-01-15 | Ricoh Co Ltd | 撮像装置 |
| JP4807855B2 (ja) * | 2007-07-31 | 2011-11-02 | キヤノンマーケティングジャパン株式会社 | 防振装置および防振方法およびプログラム |
| WO2009060626A1 (ja) * | 2007-11-09 | 2009-05-14 | Panasonic Corporation | カメラ |
| JP2009270921A (ja) * | 2008-05-07 | 2009-11-19 | Fujitsu Media Device Kk | 角速度センサ |
-
2010
- 2010-06-01 JP JP2010125856A patent/JP5599039B2/ja not_active Expired - Fee Related
-
2011
- 2011-05-25 EP EP11167395.0A patent/EP2393279B1/en not_active Not-in-force
- 2011-05-27 US US13/117,735 patent/US8809757B2/en not_active Expired - Fee Related
- 2011-05-27 CN CN201110139330.5A patent/CN102269912B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102269912B (zh) | 2014-08-13 |
| US8809757B2 (en) | 2014-08-19 |
| US20110292510A1 (en) | 2011-12-01 |
| EP2393279A1 (en) | 2011-12-07 |
| EP2393279B1 (en) | 2014-09-17 |
| CN102269912A (zh) | 2011-12-07 |
| JP2011253004A (ja) | 2011-12-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6128389B2 (ja) | 撮像装置 | |
| US8150250B2 (en) | Camera body and camera system including the same | |
| JP5106021B2 (ja) | 防振制御回路および撮像装置 | |
| JP6040338B2 (ja) | 手ぶれ補正装置、撮像装置 | |
| JP2007212556A5 (ja) | ||
| JP4982341B2 (ja) | 撮像装置の防振制御回路 | |
| JP4689328B2 (ja) | 撮影システム | |
| JP2011139169A (ja) | 撮像装置 | |
| JP2018056753A (ja) | カメラコントローラ、画像処理モジュール、および半導体システム | |
| JP2009044520A (ja) | 防振制御回路 | |
| JP5599039B2 (ja) | 像ブレ補正機能付き光学装置 | |
| JP2009151028A (ja) | 振動補正制御回路およびそれを搭載する撮像装置 | |
| JP2014068336A (ja) | 撮像装置および画像処理装置 | |
| JP2009151202A (ja) | 振動補正制御回路及びそれを備えた撮像装置 | |
| JP2012060472A (ja) | 光学機器及びそれを備えた撮像装置、光学機器の制御方法 | |
| JP2011253004A5 (ja) | ||
| JP2005257919A (ja) | 像振れ補正装置 | |
| JP5137556B2 (ja) | 振動補正制御回路およびそれを搭載する撮像装置 | |
| JP2015095670A (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP4760175B2 (ja) | 像振れ補正装置 | |
| JP5123606B2 (ja) | 防振制御回路 | |
| JP2011170383A (ja) | レンズ装置、及びそれを有する撮像装置 | |
| JP2009042544A (ja) | 防振制御回路 | |
| JP2010230916A (ja) | ブレ補正装置および光学機器 | |
| JP2009134070A (ja) | 撮像装置の防振制御回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120730 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20120731 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20120831 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130516 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130516 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20130701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140715 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140808 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5599039 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |