JP5514314B2 - 磁界検知マイコンおよび磁界検知方法 - Google Patents
磁界検知マイコンおよび磁界検知方法 Download PDFInfo
- Publication number
- JP5514314B2 JP5514314B2 JP2012526280A JP2012526280A JP5514314B2 JP 5514314 B2 JP5514314 B2 JP 5514314B2 JP 2012526280 A JP2012526280 A JP 2012526280A JP 2012526280 A JP2012526280 A JP 2012526280A JP 5514314 B2 JP5514314 B2 JP 5514314B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- voltage
- field detection
- output
- voltage control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 278
- 239000004065 semiconductor Substances 0.000 claims description 43
- 239000000758 substrate Substances 0.000 claims description 41
- 230000007423 decrease Effects 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 32
- 238000012545 processing Methods 0.000 description 25
- 238000000034 method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 19
- 230000035945 sensitivity Effects 0.000 description 13
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000003321 amplification Effects 0.000 description 8
- 238000003199 nucleic acid amplification method Methods 0.000 description 8
- 238000007689 inspection Methods 0.000 description 7
- 230000003247 decreasing effect Effects 0.000 description 5
- 101100464779 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) CNA1 gene Proteins 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 101100102849 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) VTH1 gene Proteins 0.000 description 3
- 101150088150 VTH2 gene Proteins 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 101710170230 Antimicrobial peptide 1 Proteins 0.000 description 2
- 101100450123 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) HAL1 gene Proteins 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 240000001973 Ficus microcarpa Species 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000013081 microcrystal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images
























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0023—Electronic aspects, e.g. circuits for stimulation, evaluation, control; Treating the measured signals; calibration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F17/00—Digital computing or data processing equipment or methods, specially adapted for specific functions
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10B—ELECTRONIC MEMORY DEVICES
- H10B61/00—Magnetic memory devices, e.g. magnetoresistive RAM [MRAM] devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N59/00—Integrated devices, or assemblies of multiple devices, comprising at least one galvanomagnetic or Hall-effect element covered by groups H10N50/00 - H10N52/00
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Databases & Information Systems (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Measuring Magnetic Variables (AREA)
- Hall/Mr Elements (AREA)
- Geophysics And Detection Of Objects (AREA)
Description
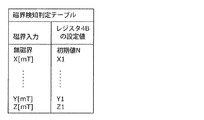
図1は、本発明の実施の形態1に係る磁界検知マイコン19のブロック図であり、図2Aの磁界検知判定テーブル、図3の磁界検知の動作タイミングチャート、図4A〜図4Eの磁界検知設定アルゴリズム、図5の磁界検知設定アルゴリズム実行時の動作タイミングチャートで説明する。以下においては、図2Aの磁界検知判定テーブルを、単に、図2Aのテーブルともいう。
図6は、本発明の実施の形態2に係る磁界検知マイコン19Aのブロック図である。
図8、図9および図10は、本発明の実施の形態3に係る磁界検知マイコンの磁界極性を検知するアルゴリズムであり、以下にその動作を説明する。本実施の形態に係る磁界検知マイコンは、第1の実施の形態に係る磁界検知マイコン19である。
図13は、本発明の実施の形態4に係る磁界検知マイコン19Bのブロック図である。
図14は、本発明の第5の実施の形態に係る磁界検知マイコンに使用される半導体基板200の斜視図である。第5の実施の形態に係る磁界検知マイコンは、磁界検知マイコン19、19A、19Bのいずれであってもよい。
図15は、本発明の第6の実施の形態に係る磁界検知マイコンの半導体レイアウト図である。図15に示される各構成要素は、半導体基板200上に形成される。
図17は、本発明の実施の形態7に係る磁界検知マイコン405のブロック図である。
図20は、磁界検知マイコン500の特徴的な機能構成を示すブロック図である。磁界検知マイコン500は、前述の磁界検知マイコン19、19A、19B、405のいずれかに相当する。つまり、図20は、磁界検知マイコン19、19A、19B、405のいずれかの有する機能のうち、本発明に関わる主要な機能を示すブロック図である。
4A、4B、4C、4D、4E レジスタ
10、510 磁界検知素子
11、520 差動増幅器
12、540 比較器
13、530 電圧可変回路
15、570 CPU
16 ROM
16a テーブル部
17 RAM
18 周辺logic
19、19A、19B、405、500 磁界検知マイコン
21、22、23、24 端子
25、26、27、51、52、66,68、102、105、410、420、430、OUT、OUTA 出力
28、29、55、106 制御信号
30、31 スイッチ
42、44、46、49、R1、R2 基準抵抗
43、45、47、48 アナログスイッチ
50 DAC
53、304 パッド
54 アナログ出力選択回路
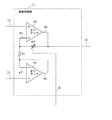
60、61 オペアンプ
65、67 −入力
100 昇圧回路
101 基準電位
103 入力
104 電圧切替回路
200 半導体基板
201、202、354、355 Nwell
203、208 ソース
204、207 ゲート
205、206 ドレイン
300、301、302、303 ホール素子部
305、306、307、308、309、310、311、312、313 IOセル
314、315、316、317、350 領域
352、353 電源ライン
400、401、402、403 磁界検知回路ブロック
550 電圧制御レジスタ
560 記憶部
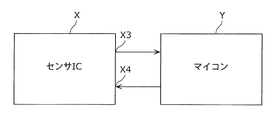
X センサーIC
X3 出力端子
X4 入力端子
Y マイコン
HAL1 ホール素子
AMP1 増幅回路
CMP1 比較回路
BL1 基準電圧回路
SW1 スイッチ回路
OUTB、VTH1、VTH2 基準電圧
Claims (11)
- 磁界を検知するための磁界検知素子と、
前記磁界検知素子の出力電圧を増幅する差動増幅器と、
電圧制御信号に応じて、可変である基準電圧を生成する電圧可変回路と、
前記差動増幅器の出力と、前記電圧可変回路が生成した基準電圧とを比較する比較器と、
前記電圧可変回路が生成する基準電圧のレベルを制御するための電圧制御値を保持し、当該電圧制御値をもつ前記電圧制御信号を前記電圧可変回路に出力する電圧制御レジスタと、
前記磁界検知素子にかかる磁界の強度である磁界強度と、前記電圧制御値とを対応させて第1テーブルとして予め記憶する記憶部と、
前記電圧制御レジスタに検知対象の磁界に対応する電圧制御値を設定し、前記比較器の比較結果および前記第1テーブルから、当該電圧制御値に対応する磁界強度の有無を判定するCPUとを備える
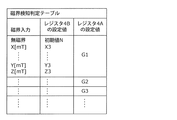
磁界検知マイコン。 - 前記差動増幅器は、ゲイン制御信号に応じてゲイン可変であり、
前記磁界検知マイコンは、さらに、
前記差動増幅器のゲインを設定するためのゲイン制御値を保持し、当該ゲイン制御値をもつゲイン制御信号を前記差動増幅器に出力するゲイン制御レジスタを備え、
前記記憶部は、前記ゲイン制御値毎に、前記磁界強度と、前記電圧制御値とを対応させて前記第1テーブルとして予め記憶する
請求項1記載の磁界検知マイコン。 - 前記CPUは、前記電圧制御レジスタに保持された前記電圧制御値を順次増加または減少させ、前記比較器の出力が反転したときに、当該電圧制御値に対応する磁界強度を前記第1テーブルから検知した磁界強度として読み出す
請求項1または2記載の磁界検知マイコン。 - 前記電圧可変回路はD/Aコンバータである
請求項1〜3のいずれか1項に記載の磁界検知マイコン。 - 前記記憶部は、さらに、前記磁界検知素子にかかるS極の磁界強度と、前記比較器の出力が反転する条件を示す電圧制御値とを対応させて第2テーブルとして予め記憶し、
前記記憶部は、前記磁界検知素子にかかるN極の磁界強度と、前記比較器の出力が反転する条件を示す電圧制御値とを対応させて前記第1テーブルとして予め記憶する
請求項1記載の磁界検知マイコン。 - 前記CPUは、前記第1テーブルを用いた磁界検知と、前記第2テーブルを用いた磁界検知とを所定回数ずつ交互に行う
請求項5記載の磁界検知マイコン。 - 前記磁界検知マイコンは、さらに、
電源電圧を昇圧する昇圧回路と、
昇圧された電源電圧と昇圧されていない電源電圧の一方を選択し、選択した電源電圧を前記磁界検知素子に供給する電圧切替回路とを備え、
前記記憶部は、前記昇圧された電源電圧および前記昇圧されていない電源電圧のそれぞれについて、前記磁界強度と、前記電圧制御値とを対応させて前記第1テーブルとして予め記憶し、
前記CPUは、前記電圧切替回路により選択された電源電圧に対応する電圧制御値を用いて磁界強度を検知する
請求項1記載の磁界検知マイコン。 - 前記磁界検知素子はホール素子であり、
前記磁界検知素子、前記差動増幅器、前記電圧可変回路、前記比較器、前記電圧制御レジスタ、前記記憶部、および前記CPUは、同一半導体基板上に形成されている
請求項1〜7のいずれか1項に記載の磁界検知マイコン。 - 前記ホール素子は、前記半導体基板の4隅のうちの少なくとも1隅に形成される
請求項8記載の磁界検知マイコン。 - 前記磁界検知マイコンは、さらに、
前記磁界検知素子と同じ構成の3つの磁界検知素子と、
前記差動増幅器、前記電圧可変回路および前記比較器を含むセットと同じ構成の3つのセットとを有し、
4つの前記磁界検知素子は、前記半導体基板の4隅に配置され、
前記CPUは、4つのセットのそれぞれを用いて磁界を検知する
請求項8記載の磁界検知マイコン。 - 磁界検知マイコンにおける磁界検知方法であって、
前記磁界検知マイコンは、
磁界を検知するための磁界検知素子と、
前記磁界検知素子の出力電圧を増幅する差動増幅器と、
電圧制御信号に応じて可変である基準電圧を生成する電圧可変回路と、
前記差動増幅器の出力と、前記電圧可変回路が生成した基準電圧とを比較する比較器と、
前記電圧可変回路が生成する基準電圧のレベルを制御するための電圧制御値を保持し、当該電圧制御値をもつ前記電圧制御信号を前記電圧可変回路に出力する電圧制御レジスタと、
前記磁界検知素子にかかる磁界の強度である磁界強度と、前記電圧制御値とを対応させて第1テーブルとして予め記憶する記憶部とを備え、
前記磁界検知方法は、
前記電圧制御レジスタに検知対象の磁界に対応する電圧制御値を設定し、
前記比較器の出力が反転したか否かを判定し、
前記比較器の出力が反転したと判定された場合、当該電圧制御値に対応する磁界強度を前記第1テーブルから読み出す
磁界検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012526280A JP5514314B2 (ja) | 2010-07-30 | 2011-06-30 | 磁界検知マイコンおよび磁界検知方法 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010173025 | 2010-07-30 | ||
| JP2010173025 | 2010-07-30 | ||
| PCT/JP2011/003762 WO2012014376A1 (ja) | 2010-07-30 | 2011-06-30 | 磁界検知マイコンおよび磁界検知方法 |
| JP2012526280A JP5514314B2 (ja) | 2010-07-30 | 2011-06-30 | 磁界検知マイコンおよび磁界検知方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012014376A1 JPWO2012014376A1 (ja) | 2013-09-09 |
| JP5514314B2 true JP5514314B2 (ja) | 2014-06-04 |
Family
ID=45529615
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012526280A Active JP5514314B2 (ja) | 2010-07-30 | 2011-06-30 | 磁界検知マイコンおよび磁界検知方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9316702B2 (ja) |
| JP (1) | JP5514314B2 (ja) |
| CN (1) | CN102971640B (ja) |
| WO (1) | WO2012014376A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6393470B2 (ja) * | 2013-10-23 | 2018-09-19 | 日立オートモティブシステムズ株式会社 | センサ装置 |
| EP3167629B1 (en) * | 2014-07-07 | 2018-09-12 | Ascensia Diabetes Care Holdings AG | Methods and apparatus for improved low energy data communications |
| US10386392B2 (en) * | 2015-01-28 | 2019-08-20 | Hioki Denki Kabushiki Kaisha | Hall element driving circuit, sensor circuit, and current measuring apparatus |
| US10360855B2 (en) * | 2015-08-17 | 2019-07-23 | Semiconductor Energy Laboratory Co., Ltd. | Semiconductor device, display panel, and electronic device |
| JP6619591B2 (ja) * | 2015-09-04 | 2019-12-11 | 旭化成エレクトロニクス株式会社 | 磁気検出装置及び方法ならびに集積回路 |
| US9852094B2 (en) * | 2015-12-07 | 2017-12-26 | Allegro Microsystems, Llc | Device configuration using a magnetic field |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03261869A (ja) * | 1990-03-13 | 1991-11-21 | Omron Corp | ホール素子の出力信号補正装置 |
| JP2738605B2 (ja) * | 1991-06-04 | 1998-04-08 | 三菱電機株式会社 | 磁石発電装置 |
| FR2747822A1 (fr) * | 1996-04-17 | 1997-10-24 | Philips Electronics Nv | Systeme de lecture d'informations magnetiques muni d'un detecteur d'asperites thermiques |
| JP3912779B2 (ja) | 2002-05-08 | 2007-05-09 | 松下電器産業株式会社 | 磁気式位置検出装置 |
| JP2006038799A (ja) * | 2004-07-30 | 2006-02-09 | Tamura Seisakusho Co Ltd | 検出器 |
| JP2006098306A (ja) * | 2004-09-30 | 2006-04-13 | Yamaha Corp | 磁気測定装置 |
| JP2008032424A (ja) * | 2006-07-26 | 2008-02-14 | Rohm Co Ltd | センサ回路、半導体装置、電子機器 |
| JP5144168B2 (ja) * | 2007-08-16 | 2013-02-13 | セイコーインスツル株式会社 | センサ回路 |
| JP5060871B2 (ja) * | 2007-08-22 | 2012-10-31 | セイコーインスツル株式会社 | 可変分圧回路及び磁気センサ回路 |
-
2011
- 2011-06-30 WO PCT/JP2011/003762 patent/WO2012014376A1/ja active Application Filing
- 2011-06-30 JP JP2012526280A patent/JP5514314B2/ja active Active
- 2011-06-30 CN CN201180033356.XA patent/CN102971640B/zh active Active
-
2013
- 2013-01-25 US US13/750,589 patent/US9316702B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2012014376A1 (ja) | 2013-09-09 |
| WO2012014376A1 (ja) | 2012-02-02 |
| US20130138374A1 (en) | 2013-05-30 |
| CN102971640A (zh) | 2013-03-13 |
| US9316702B2 (en) | 2016-04-19 |
| CN102971640B (zh) | 2016-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5514314B2 (ja) | 磁界検知マイコンおよび磁界検知方法 | |
| CN100567903C (zh) | 传感设备和检测电路 | |
| TWI442206B (zh) | Voltage divider circuit and magnetic sensor circuit | |
| US8278920B2 (en) | Magnetic sensor and magnetic measurement method | |
| JP2010117271A (ja) | センサ回路 | |
| JP2003258581A (ja) | クランプ回路 | |
| JP2007187509A (ja) | 容量式物理量センサ | |
| KR20100083729A (ko) | 검출 회로 및 센서 장치 | |
| US20140232388A1 (en) | Magnetic sensor device | |
| JP6158682B2 (ja) | 磁気センサ回路 | |
| JP4641775B2 (ja) | 磁気検出用半導体集積回路およびそれを搭載した電子部品 | |
| JP2019020366A (ja) | 磁気センサ回路 | |
| JP5281556B2 (ja) | 物理量センサ | |
| KR101276947B1 (ko) | 저전력, 고정밀, 넓은 온도범위의 온도 센서 | |
| JP2009284050A (ja) | 差動増幅回路 | |
| US20060229839A1 (en) | Temperature sensing and monitoring technique for integrated circuit devices | |
| JP6580718B2 (ja) | バイアス電流回路、信号処理装置及びバイアス電流制御方法 | |
| CN107591433B (zh) | 一种显示面板及其压力检测电路的压力检测方法、显示装置 | |
| JP2009075006A (ja) | センサ装置 | |
| WO2023279113A1 (en) | Differential pmos isfet-based ph sensor | |
| JP5493541B2 (ja) | 評価システム及び評価方法 | |
| JP2011027535A (ja) | 演算増幅器評価回路及び評価方法 | |
| JP2009033059A (ja) | 半導体装置 | |
| JP2008022414A (ja) | 増幅回路 | |
| JP2017163008A (ja) | 半導体集積回路及び温度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140328 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5514314 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |