JP5495831B2 - 画像形成装置 - Google Patents
画像形成装置 Download PDFInfo
- Publication number
- JP5495831B2 JP5495831B2 JP2010027605A JP2010027605A JP5495831B2 JP 5495831 B2 JP5495831 B2 JP 5495831B2 JP 2010027605 A JP2010027605 A JP 2010027605A JP 2010027605 A JP2010027605 A JP 2010027605A JP 5495831 B2 JP5495831 B2 JP 5495831B2
- Authority
- JP
- Japan
- Prior art keywords
- electrostatic latent
- conductor
- image
- latent image
- scanning direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5033—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the photoconductor characteristics, e.g. temperature, or the characteristics of an image on the photoconductor
- G03G15/5037—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the photoconductor characteristics, e.g. temperature, or the characteristics of an image on the photoconductor the characteristics being an electrical parameter, e.g. voltage
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5033—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control by measuring the photoconductor characteristics, e.g. temperature, or the characteristics of an image on the photoconductor
Landscapes
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Color Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
Description
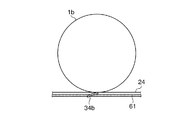
0.3384×3+0.1692×3+00846×3=1.0152+0.5076+0.2538=1.7766mm となり、先端余白より短い領域である。第二画像形成部43b以降も同様に先端余白部の目盛りピッチは有効画像部の目盛りピッチの8倍のものから形成し始めて、4倍、2倍、と徐々にピッチを細かくして、最小ピッチの目盛りにつなげていく。従来、電子写真装置においては、画像位置ズレが100〜150μm程度生ずることが予期されているので、第一画像形成部43aで中間転写ベルト24に転写された静電ベルト目盛り32に対し、第二画像形成部43bの転写位置での感光ドラム1bに転写された静電潜像目盛りの位置は最大でも150μm程度のズレであって、ドラムまたはベルトのいずれかの潜像目盛り線を検知した後は、必ずもう一方の潜像目盛り線を検知することなり、対応させるべき目盛り線が交互に検知されるので、ドラム側の潜像目盛り線を検知するたびにドラム側の潜像目盛りを静電ベルト目盛り32の位置に合わせるように感光ドラムの回転速度を調整すればよい。先端余白部で、徐々に目盛りピッチを小さくしていくことで、有効画像領域に至るまで対応する目盛りを見失うことなく位置合わせを継続して行うことができる。
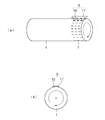
3、7 静電潜像線
5、9、13、20、22 導体
6 導線
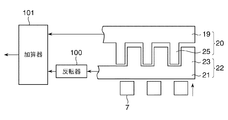
8 回路要素(検出ユニット)
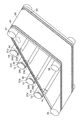
10、14、23、25 櫛歯部
11、15、19、21 櫛歯支持部
26 穴の開いた薄膜導体
100 反転器
101 加算器
Claims (15)
- 像担持体の主走査方向に延びるように形成される静電潜像線との相対移動時に、前記静電潜像線と互いにその一部が主走査方向に重なるように配置され、相対移動により誘導電流を発生させる導体と、
前記導体により発生された前記誘導電流の測定結果に基づいて、主走査方向の画像の位置ずれを検出する検出手段と、
を備えることを特徴とする画像形成装置。 - 前記静電潜像線は、前記画像形成装置の解像度程度の間隔を有する点線であり、前記導体は、前記静電潜像線とほぼ等しい間隔の櫛歯部を有することを特徴とする請求項1記載の画像形成装置。
- 前記導体は、前記櫛歯部が平行でかつ重ならないように2つ配置され、一方の前記導体からの出力信号を反転し、もう一方の前記導体からの出力信号と加算することを特徴とする請求項2記載の画像形成装置。
- 前記導体は、前記櫛歯部が噛み合うように2つ配置され、一方の前記導体からの出力信号を反転し、もう一方の前記導体からの出力信号と加算することを特徴とする請求項2記載の画像形成装置。
- 前記櫛歯部を支持する櫛歯支持部が、前記櫛歯部より前記静電潜像線の電荷の影響が小さい距離に固定されていることを特徴とする請求項2記載の画像形成装置。
- 前記櫛歯部を支持する櫛歯支持部と前記像担持体の間にはグランドに接続された導体を有することを特徴とする請求項5記載の画像形成装置。
- 前記静電潜像線と前記導体を、前記像担持体の両端に配置したことを特徴とする請求項1乃至6のいずれか1項に記載の画像形成装置。
- 前記検出された画像の位置ずれ量を基に、レーザ露光照射位置、転写位置での前記像担持体、転写ベルトの全てまたはいずれかを制御することを特徴とする請求項1乃至7のいずれか1項に記載の画像形成装置。
- 前記静電潜像線は、副走査方向に所定の間隔で複数形成され、前記検出手段は、前記導体により発生された前記誘導電流の発生の間隔に基づいて、副走査方向の画像の位置ずれも検出することを特徴とする請求項1乃至8のいずれか1項に記載の画像形成装置。
- 像担持体の主走査方向に平行に形成される第1の静電潜像線に対して平行に配置される第1の導体と、
前記像担持体の前記主走査方向に傾斜して形成される第2の静電潜像線に対して平行に配置される第2の導体と、を有し、
前記静電潜像線に対して前記導体を相対移動させることにより誘導電流を発生させ、前記第1の導体からの第1の出力信号と、前記第2の導体からの第2の出力信号との位相差から、前記主走査方向と副走査方向の画像の位置ずれを検出することを特徴とする画像形成装置。 - 前記静電潜像線と前記導体を、前記像担持体の両端に配置したことを特徴とする請求項10記載の画像形成装置。
- 前記検出された画像の位置ずれ量を基に、レーザ露光照射位置、転写位置での前記像担持体、転写ベルトの全てまたはいずれかを制御することを特徴とする請求項10又は11記載の画像形成装置。
- 回転が可能に設けられ、静電潜像線が形成される像担持体と、
前記像担持体上に形成される前記静電潜像線と一部が重なるように配置され、前記像担持体の回転の方向である副走査方向に直交する主走査方向の前記静電潜像線が形成される位置に応じて変化する誘導電流を発生する導体と、
前記導体に発生する誘導電流を検出する検出手段と、
前記検出手段により検出された前記誘導電流に基づいて、前記像担持体上に形成される画像の前記主走査方向の位置ずれを補正する補正手段と、を備えることを特徴とする画像形成装置。 - 前記補正手段は、前記誘導電流の振幅に基づいて前記主走査方向の位置ずれを補正し、前記誘導電流の発生のタイミングに基づいて前記副走査方向の位置ずれを補正することを特徴とする請求項13記載の画像形成装置。
- 前記静電潜像線は、前記主走査方向に長手となるように形成され、
前記導体は、前記静電潜像線に平行に配置されることを特徴とする請求項13又は14記載の画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010027605A JP5495831B2 (ja) | 2009-02-13 | 2010-02-10 | 画像形成装置 |
| US12/705,156 US8265531B2 (en) | 2009-02-13 | 2010-02-12 | Image forming apparatus that detects image shift in the main scanning direction without wasting toner |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009031321 | 2009-02-13 | ||
| JP2009031321 | 2009-02-13 | ||
| JP2010027605A JP5495831B2 (ja) | 2009-02-13 | 2010-02-10 | 画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010211197A JP2010211197A (ja) | 2010-09-24 |
| JP2010211197A5 JP2010211197A5 (ja) | 2013-03-28 |
| JP5495831B2 true JP5495831B2 (ja) | 2014-05-21 |
Family
ID=42560003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010027605A Expired - Fee Related JP5495831B2 (ja) | 2009-02-13 | 2010-02-10 | 画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8265531B2 (ja) |
| JP (1) | JP5495831B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010210753A (ja) * | 2009-03-09 | 2010-09-24 | Seiko Epson Corp | 画像形成装置、画像形成方法 |
| JP5645545B2 (ja) * | 2010-08-23 | 2014-12-24 | キヤノン株式会社 | 画像形成装置 |
| JP5541723B2 (ja) * | 2010-10-29 | 2014-07-09 | キヤノン株式会社 | 画像形成装置 |
| JP5623252B2 (ja) * | 2010-11-15 | 2014-11-12 | キヤノン株式会社 | 画像形成装置 |
| JP5679888B2 (ja) * | 2011-04-19 | 2015-03-04 | キヤノン株式会社 | カラー画像形成装置 |
| US8750771B2 (en) * | 2011-04-19 | 2014-06-10 | Canon Kabushiki Kaisha | Image forming apparatus having a plurality of latent image indexes |
| JP5773722B2 (ja) * | 2011-04-19 | 2015-09-02 | キヤノン株式会社 | カラー画像形成装置 |
| JP5759260B2 (ja) * | 2011-05-23 | 2015-08-05 | キヤノン株式会社 | カラー画像形成装置 |
| JP5777410B2 (ja) * | 2011-06-01 | 2015-09-09 | キヤノン株式会社 | 画像形成装置 |
| US9075370B2 (en) * | 2011-06-30 | 2015-07-07 | Canon Kabushiki Kaisha | Color image forming apparatus |
| JP6039904B2 (ja) * | 2012-01-31 | 2016-12-07 | キヤノン株式会社 | 画像形成装置 |
| JP5967957B2 (ja) * | 2012-01-31 | 2016-08-10 | キヤノン株式会社 | 画像形成装置 |
| JP6112800B2 (ja) * | 2012-08-02 | 2017-04-12 | キヤノン株式会社 | カラー画像形成装置 |
| JP6025453B2 (ja) * | 2012-08-27 | 2016-11-16 | キヤノン株式会社 | 画像形成装置 |
| JP6100018B2 (ja) * | 2013-02-19 | 2017-03-22 | キヤノン株式会社 | 画像形成装置 |
| JP2014160103A (ja) * | 2013-02-19 | 2014-09-04 | Canon Inc | 画像形成装置 |
| JP6135186B2 (ja) * | 2013-02-28 | 2017-05-31 | 株式会社リコー | 光書き込み制御装置、画像形成装置及び光書き込み装置の制御方法 |
| US10761467B1 (en) * | 2019-08-27 | 2020-09-01 | Toshiba Tec Kabushiki Kaisha | Image forming apparatus and image position adjustment method |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2505206B2 (ja) | 1987-06-30 | 1996-06-05 | キヤノン株式会社 | 画像形成装置 |
| JP2000318221A (ja) * | 1999-05-14 | 2000-11-21 | Ricoh Co Ltd | 画像形成装置 |
| JP3481519B2 (ja) | 1999-09-17 | 2003-12-22 | 富士通株式会社 | 画像形成装置 |
| JP2005077469A (ja) * | 2003-08-28 | 2005-03-24 | Ricoh Co Ltd | 画像形成装置 |
| JP2006038666A (ja) * | 2004-07-28 | 2006-02-09 | Ricoh Co Ltd | 電位変化測定装置 |
| JP4546846B2 (ja) * | 2005-01-24 | 2010-09-22 | 株式会社リコー | 画像形成装置 |
| JP2007196621A (ja) * | 2006-01-30 | 2007-08-09 | Konica Minolta Business Technologies Inc | 信号処理装置及び画像形成装置 |
| JP5102518B2 (ja) * | 2007-03-13 | 2012-12-19 | 株式会社リコー | 画像形成装置 |
-
2010
- 2010-02-10 JP JP2010027605A patent/JP5495831B2/ja not_active Expired - Fee Related
- 2010-02-12 US US12/705,156 patent/US8265531B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010211197A (ja) | 2010-09-24 |
| US8265531B2 (en) | 2012-09-11 |
| US20100209124A1 (en) | 2010-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5495831B2 (ja) | 画像形成装置 | |
| JP5455822B2 (ja) | 画像形成装置 | |
| JP4898259B2 (ja) | 画像形成装置 | |
| JP5623252B2 (ja) | 画像形成装置 | |
| JP7271284B2 (ja) | 画像形成装置 | |
| JP2011033856A (ja) | 画像形成装置および画像形成方法 | |
| JP5541723B2 (ja) | 画像形成装置 | |
| JP2009163103A (ja) | 画像形成装置および画像形成方法 | |
| US8862001B2 (en) | Image forming apparatus with toner image alignment | |
| JP5153250B2 (ja) | 画像形成装置 | |
| JP5679888B2 (ja) | カラー画像形成装置 | |
| JP4378065B2 (ja) | 画像形成装置 | |
| JP4246811B2 (ja) | 画像形成装置 | |
| KR102004384B1 (ko) | 화상 형성 장치 및 그 제어 방법 | |
| KR101825485B1 (ko) | 멀티패스 컬러 화상형성장치 및 그 제어방법 | |
| JP5127298B2 (ja) | 画像形成装置および湾曲補正データ算出方法 | |
| JP5645545B2 (ja) | 画像形成装置 | |
| JP2009210759A (ja) | 画像形成装置 | |
| JP6486430B2 (ja) | レーザ光間の位置ずれを補正する画像形成装置 | |
| US9037012B2 (en) | Image forming apparatus | |
| JP2008052128A (ja) | 画像形成装置 | |
| JP2008181093A (ja) | 画像形成装置 | |
| JP4893878B2 (ja) | 画像形成システム,画像形成システムにおける電源電圧の偏差補正方法,電源電圧の偏差補正装置及びコンピュータで読取り可能な書込み媒体 | |
| JP2006276703A (ja) | 画像濃度制御方法および画像形成装置 | |
| JP2012226094A (ja) | カラー画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131023 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140304 |
|
| LAPS | Cancellation because of no payment of annual fees |