JP5465085B2 - 重量計量装置 - Google Patents
重量計量装置 Download PDFInfo
- Publication number
- JP5465085B2 JP5465085B2 JP2010117446A JP2010117446A JP5465085B2 JP 5465085 B2 JP5465085 B2 JP 5465085B2 JP 2010117446 A JP2010117446 A JP 2010117446A JP 2010117446 A JP2010117446 A JP 2010117446A JP 5465085 B2 JP5465085 B2 JP 5465085B2
- Authority
- JP
- Japan
- Prior art keywords
- weight
- rotatably connected
- load cell
- pin
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Landscapes
- Refuse-Collection Vehicles (AREA)
Description

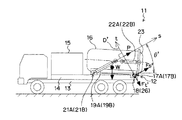
図5から図7に示すダンプ排出機能を有する汚泥吸引車11は、過積載検出等のために本発明の実施形態に係る車載重量計量装置12を備える。この汚泥吸引車11はシャシー13上に固定されたサブフレーム14上に吸引/集塵装置15で吸引した汚泥を溜めるためのタンク16を備える。タンク16は後方の左右2箇所がヒンジ17A,17Bによってサブフレーム14に対して回転自在に連結されている。後に詳述するように、これらのヒンジ17A,17Bにピン型ロードセル18が組み込まれている。また、ヒンジ17A,17Bよりも前方側にはタンク16を傾斜させるためのダンプシリンダ19A,19Bが左右に配置されている。個々のダンプシリンダ19A,19Bは、ロッドの先端である上端がタンク16の側面にピン結合により回転自在に連結される一方、下端はヒンジ21A,21Bによってサブフレーム14に対して回転自在に連結されている。排出シリンダ22A,22Bで開閉される排出扉23がタンク16の最後部に設けられている。
図14は本発明の第2実施形態に係る荷物集配場用の重量計量装置41を示す。この荷物集配場の床構造42は図示しない倉庫等へ通路として機能する床面42aとこの床面42aよりも下方に位置する床面42bを備える段付き構造を有する。床面42aの床面42bからの高さは床面42bに駐車されたトラック43の荷台43aと概ね同じ高さ位置となるように設定されている。床面42aの先端から張り出しデッキ45が延びており、この張り出しデッキ45を通って荷台43aへの荷物46の積み降ろしが実行される。張り出しデッキ45は一端がヒンジ17A’,17B’により床構造42(床面42a,42bの境目にある側壁42c)に回転自在に連結されている。また、張り出しデッキ45の他端には固定長の傾斜ロッド47の一端がピン結合により回転自在に連結されている。傾斜ロッド47は張り出しデッキ45から図において右斜め下へ延びて、他端がピン結合により床面42bに対して回転自在に連結されている。この重量計量装置41は図1と同様のトラス構造を有し、張り出しデッキ45が図1の積載台A、ヒンジ17A’,17B’が図1のヒンジ2A(点O)、傾斜ロッド47が図1の傾斜ロッドBCにそれぞれ対応する。
1a 側壁部
1b 底壁部
2A,2B,2C ヒンジ
3 計量物
4 リフトアーム
5 テンションリンク
6 油圧シリンダ
11 汚泥吸引車
12 車載重量計量装置
13 シャシー
14 サブフレーム
15 吸引/集塵装置
16 タンク
17A,17B ヒンジ
18 ピン型ロードセル
19A,19B ダンプシリンダ
21A,21B ヒンジ
22A,22B 排出シリンダ
23 排出扉
25A,25B 固定軸受
26 軸状弾性体
27 回転抜け止め
28 可動側軸受
29A,29B,29C,29D 凹部
31A,31B 起歪部
32A,32B,32C,32D 歪みゲージ
33A,33B 凹部
34 貫通孔
41 重量計量装置
42 床構造
42a,42b 床面
42c 側壁
43 トラック
43a 荷台
45 張り出しデッキ
46 荷物
47 傾斜ロッド
Claims (3)
- 一端がヒンジ機構で基部に対して回転自在に支持されて計量物が積載される積載部と、
前記積載部の前記一端から他端側に距離を隔てた位置に一端が回転自在に連結される一方、他端が前記基部に回転自在に連結された斜めに延びる支持部と、
前記ヒンジ機構のピンを構成する軸状弾性体を備え、荷重検出方向が前記支持部の軸力の方向と直交するように前記基部に取り付けられたピン型ロードセルと
を備える重量計量装置。 - 前記基部は車両の車体であり、
前記積載部は、前記車体に搭載されて後部側が前記車体に対して前記ヒンジ機構によって前記車体に対して回転自在に連結され、前記ヒンジ機構を中心に傾動可能であり、
前記支持部は一端が前記積載部に回転自在に連結されて他端が前記車体に対して回転自在に連結された伸縮可能なシリンダであり、
前記ピン型ロードセルは、前記積載部が傾斜するように前記シリンダを伸張させたときの前記シリンダの推力の方向と直交する方向が前記荷重検出方向となるように前記車体に固定されている、請求項1に記載の重量計量装置。 - 前記基部は、第1の床面部とこの第1の床面部よりも下方に位置する第2の床面部を有する段付きの床構造であり、
前記積載部は一端が前記第1の床面部と同一高さとなるように前記ヒンジ機構によって前記床構造に対して回転自在に連結され、
前記支持部は一端が前記積載部に回転自在に連結される一方、他端が前記第2の床面部に回転自在に連結された斜めに延びる固定長の支持部材であり、
前記ピン型ロードセルは、前記支持部材の軸力の方向と直交する方向が前記荷重検出方向となるように前記床構造に固定されている、請求項1に記載の重量計量装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010117446A JP5465085B2 (ja) | 2010-05-21 | 2010-05-21 | 重量計量装置 |
| CN201110144302.2A CN102269618B (zh) | 2010-05-21 | 2011-05-20 | 称重装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010117446A JP5465085B2 (ja) | 2010-05-21 | 2010-05-21 | 重量計量装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011242375A JP2011242375A (ja) | 2011-12-01 |
| JP2011242375A5 JP2011242375A5 (ja) | 2013-05-02 |
| JP5465085B2 true JP5465085B2 (ja) | 2014-04-09 |
Family
ID=45051987
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010117446A Active JP5465085B2 (ja) | 2010-05-21 | 2010-05-21 | 重量計量装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5465085B2 (ja) |
| CN (1) | CN102269618B (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6108687B2 (ja) * | 2012-05-23 | 2017-04-05 | 株式会社Ihiスター | 重量計測装置及び重量計測装置の制御方法 |
| CN103063345B (zh) * | 2012-12-19 | 2015-06-10 | 三一重工股份有限公司 | 一种检测轴销所承受径向力的方法 |
| CN103438965B (zh) * | 2013-09-04 | 2016-02-10 | 山东胜油固井工程技术有限公司 | 铰链式储罐称重计量装置 |
| JP6326394B2 (ja) * | 2015-10-09 | 2018-05-16 | Kyb株式会社 | ミキサ車の積載量計量装置 |
| CN105403299B (zh) * | 2015-12-21 | 2019-04-09 | 天津汇丰金属探测股份有限公司 | 一种叉车秤 |
| CN106840339B (zh) * | 2017-01-22 | 2019-06-11 | 浙江联运知慧科技有限公司 | 一种用于环卫收运车垃圾动态称重的方法 |
| CN106932064A (zh) * | 2017-03-29 | 2017-07-07 | 徐州赫思曼电子有限公司 | 一种自卸式车辆称重装置及其工作方法 |
| CN109990878A (zh) * | 2019-03-01 | 2019-07-09 | 利康森隆(丹阳)智能机械有限公司 | 一种半挂车车载称重装置及安装方法 |
| CN116465752B (zh) * | 2023-06-20 | 2023-08-25 | 河北济沧建设科技有限公司 | 一种建筑材料的多功能检测装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5255562A (en) * | 1975-10-31 | 1977-05-07 | Komatsu Mfg Co Ltd | Apparatus for measuring weight of vessel loadage |
| CN1024218C (zh) * | 1985-07-05 | 1994-04-13 | 勒鲁瓦·赫根布 | 根据车上测得负载而反应的设备 |
| JPS6345510A (ja) * | 1986-08-13 | 1988-02-26 | Tokyu Car Corp | 荷重検出装置 |
| JP2711751B2 (ja) * | 1990-07-11 | 1998-02-10 | 株式会社クボタ | フォークリフトトラック |
| CN2114819U (zh) * | 1992-03-17 | 1992-09-02 | 李界生 | 罐式粉状物料运输汽车计量器 |
| JP3518703B2 (ja) * | 1995-04-25 | 2004-04-12 | 富士重工業株式会社 | 計量方法、計量装置及び計量装置を備えたごみ収集車 |
| JP4028609B2 (ja) * | 1996-09-24 | 2007-12-26 | 小平産業株式会社 | 傾斜荷台付き車両の積載物の重量測定装置 |
| JP3794094B2 (ja) * | 1997-03-12 | 2006-07-05 | 日産自動車株式会社 | フォークリフトの安定度試験用治具 |
| JPH1151753A (ja) * | 1997-08-06 | 1999-02-26 | Fuji Heavy Ind Ltd | 荷重検出装置及びその検出方法 |
| CN2450647Y (zh) * | 2000-11-09 | 2001-09-26 | 张家港保税区中诚国际工贸有限公司 | 动态轴销式测力传感器 |
| JP3684177B2 (ja) * | 2001-08-01 | 2005-08-17 | 株式会社マツモト | 計量器付きタンク車輌 |
| US7247803B2 (en) * | 2004-01-15 | 2007-07-24 | Komatsu Ltd. | Loaded weight measurement method and loaded weight measurement device for dump truck |
| JP4762688B2 (ja) * | 2005-11-16 | 2011-08-31 | Jfeアドバンテック株式会社 | 車載重量計量装置および該車載重量計量装置を備えた車両 |
| JP2009101979A (ja) * | 2007-10-01 | 2009-05-14 | Koji Futamura | 積載物の重量を計測することができる運搬車両 |
| CN201354031Y (zh) * | 2009-01-23 | 2009-12-02 | 重庆大唐测控技术有限公司 | 一种自卸车称重装置 |
| CN101571418B (zh) * | 2009-06-11 | 2011-04-27 | 重庆大唐科技股份有限公司 | 一种动态自卸车载秤的称重方法 |
-
2010
- 2010-05-21 JP JP2010117446A patent/JP5465085B2/ja active Active
-
2011
- 2011-05-20 CN CN201110144302.2A patent/CN102269618B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011242375A (ja) | 2011-12-01 |
| CN102269618B (zh) | 2014-03-12 |
| CN102269618A (zh) | 2011-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5465085B2 (ja) | 重量計量装置 | |
| EP2594534B1 (en) | Weighing apparatus | |
| EP2511678B1 (en) | Measurement system for a material transfer vehicle | |
| JP4762688B2 (ja) | 車載重量計量装置および該車載重量計量装置を備えた車両 | |
| US9630822B2 (en) | Method of weighing a load lifted by a lifting arm of a machine | |
| CN102297746A (zh) | 多轴车辆的质心测量装置及测量方法 | |
| US9534948B2 (en) | Method and device for measuring the weight of a load to be hoisted onto a loading area | |
| CN103038121A (zh) | 手动起重搬运车 | |
| CN106932064A (zh) | 一种自卸式车辆称重装置及其工作方法 | |
| US8431839B2 (en) | Bearing element with weight measurement for lifting platforms | |
| CA2911768C (en) | Elastically deformable load bearing structure comprising a measuring assembly for the load | |
| JP2009057154A (ja) | 塵芥収集車 | |
| JP2010271146A (ja) | 車両用積載重量検出装置 | |
| CN102788635A (zh) | 一种矿车称重系统及其方法 | |
| KR101319650B1 (ko) | 중량 계량 장치 | |
| KR101077292B1 (ko) | 화물차량의 적재물 중량측정 어셈블리 | |
| JPH0458889B2 (ja) | ||
| JPH0290023A (ja) | 貨物自動車の積載物計量装置 | |
| JP4028609B2 (ja) | 傾斜荷台付き車両の積載物の重量測定装置 | |
| WO2007043163A1 (ja) | 車載計量装置 | |
| JP3996445B2 (ja) | ミキサ車の自重計 | |
| KR200207339Y1 (ko) | 적재량 표시장치가 부설된 운반차량 | |
| CN118190126A (zh) | 运输车辆的称重系统、运输车辆和称重方法 | |
| GB2475080A (en) | Weighing suspended loads having a pivotable load pin attached to a load cell | |
| JPH0472300A (ja) | フォークリフトトラック |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130314 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140121 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5465085 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |