JP5438457B2 - 画像形成装置及びその制御方法 - Google Patents
画像形成装置及びその制御方法 Download PDFInfo
- Publication number
- JP5438457B2 JP5438457B2 JP2009234644A JP2009234644A JP5438457B2 JP 5438457 B2 JP5438457 B2 JP 5438457B2 JP 2009234644 A JP2009234644 A JP 2009234644A JP 2009234644 A JP2009234644 A JP 2009234644A JP 5438457 B2 JP5438457 B2 JP 5438457B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- exposure
- image carrier
- detection
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
- G03G15/5008—Driving control for rotary photosensitive medium, e.g. speed control, stop position control
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/04—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material
- G03G15/043—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material with means for controlling illumination or exposure
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00025—Machine control, e.g. regulating different parts of the machine
- G03G2215/00071—Machine control, e.g. regulating different parts of the machine by measuring the photoconductor or its environmental characteristics
- G03G2215/00075—Machine control, e.g. regulating different parts of the machine by measuring the photoconductor or its environmental characteristics the characteristic being its speed
- G03G2215/0008—Machine control, e.g. regulating different parts of the machine by measuring the photoconductor or its environmental characteristics the characteristic being its speed for continuous control of recording starting time
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Control Or Security For Electrophotography (AREA)
Description
また、本発明の他の一態様に係る画像形成装置は、像担持体と、画像データに基づいて像担持体の表面を露光することで静電潜像を形成する露光手段と、像担持体に形成された静電潜像を現像剤により現像する現像手段と、現像手段により現像された現像剤像が転写される中間転写体とを備える画像形成装置であって、像担持体から中間転写体へ現像剤像が転写される転写位置における中間転写体の表面速度を検出する第1の検出手段と、転写位置における中間転写体の表面速度が、予め定められた目標速度に近づくように、第1の検出手段による検出結果に基づいて中間転写体の駆動を制御する第1の制御手段と、転写位置における像担持体の表面速度を検出する第2の検出手段と、転写位置における像担持体の表面速度が、転写位置における中間転写体の表面速度と同一の速度に近づくように、第2の検出手段による検出結果に基づいて像担持体の駆動を制御する第2の制御手段と、露光手段から像担持体へ露光される露光位置における像担持体の表面速度を検出する第3の検出手段と、露光手段によって、像担持体に対して露光する副走査方向の間隔が一定の間隔に近づくように、第3の検出手段による検出結果に基づいて、露光手段による露光のタイミングを制御する第3の制御手段と、像担持体の駆動軸の回転速度を検出する第4の検出手段と、転写位置及び露光位置と異なる位置における像担持体の表面速度を検出するための第1の速度センサとを備え、第2の検出手段は、第4の検出手段による検出結果と、第1の速度センサによる検出結果とに基づいて、転写位置における像担持体の表面速度を推定する手段を備え、第3の検出手段は、第4の検出手段による検出結果と、第1の速度センサによる検出結果とに基づいて、露光位置における像担持体の表面速度を推定する手段を備えることを特徴とする。
<画像形成装置の構成>
以下では、図1乃至図7、及び、図19及び図20を参照して、本発明の第1の実施形態について説明する。図1(a)は、第1の実施形態に係る画像形成装置の側断面図の一例である。画像形成装置の中央部には、ドライブロール59を含む複数の回転ローラによって、転写ベルト(中間転写体)21が張設されている。転写ベルト21は、図1(a)の矢印方向に搬送される。また、転写ベルト21の搬送面に対向して、イエロー(Y)、マゼンタ(M)、シアン(C)、及びブラック(K)の各色のトナーに対応した4基のドラム状の像担持体(感光体ドラム)5Y、5M、5C、5Kが直線状に配設されている。
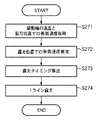
次に、第1の実施形態に係る画像形成装置における転写ベルトの駆動制御、感光体ドラムの駆動制御、及び露光タイミングの制御を含む画像形成処理に関する制御全体の流れについて説明する。図4は、第1の実施形態に係る制御に関する全体の処理手順を示すフローチャートである。
転写ベルト21の駆動装置である転写ベルト駆動部171は、転写位置における表面速度が所定の目標速度となり、かつ、一定の速度で駆動することを目標として、転写ベルト制御部161によって制御される。転写ベルト制御部161による制御により、目標位置設定部101は、転写ベルト21を一定の速度で駆動させるための目標速度に基づいて、目標位置を設定する。例えば、プロセススピード(ps(mm/sec))を目標速度として、転写ベルト21が当該目標速度と同一の速度で駆動される場合、目標位置xはプロセススピードの積分値となり、
x=∫(ps)dt=(ps)・t
と算出される。すなわち、目標位置xは、時間とともに線形的に増加する。ここで、目標位置設定部101は、数値の取り扱いを容易にするために、実際に使用する目標置x’として、累積位置誤差を用いる。その場合、目標値x’は、目標速度(ここではps)の時間積分をxから差し引いた値、
x’=x−ps・t=0
となる。すなわち、累積位置誤差算出部106からの出力が、目標値x’(=0)になるように、転写ベルト21が駆動される。
図5(a)は、第1の実施形態に係る転写ベルト21における表面速度の目標値の設定手順を示すフローチャートである。ここで、本実施形態では、転写位置における転写ベルト21の表面速度と感光体ドラム5の表面速度との誤差を限りなく0にすることを目標としている。そのためには、転写ベルト21の速度検出器及び感光体ドラム5の速度検出器による測定精度を向上させる必要がある。そこで、図5(a)では、転写ベルト21の表面速度の制御において、その精度の向上のために、転写ベルト21の表面速度の設定を2段階で行う場合について示している。本実施形態では、当該2段階の設定により絶対検出精度のずれを補う方法を用いる。なお、速度検出器又はエンコーダ等の精度を上げることにより、2段階ではなく、通常の1段階で目標速度の設定を行うようにしてもよい。
Lb=vb’・t0b=vtb・tb
t0b=Lb/Vg
より、
vb’=vtb・Lb/Vg・tb
すなわち、転写ベルト制御部161は、設定速度Vgと実際の速度のずれを、転写ベルト21が1周するのに要する時間から算出し、設定速度となるように第2の目標速度を設定し直す。なお、設定速度と実際の速度とのずれは、転写ベルト21の厚みむら、駆動ロールの半径誤差等に起因して発生する。以上のように、予め既知の転写ベルト21の周長と、インデックス信号等で計測される1周の表面速度とに基づいて、目標速度の微調整が可能である。
転写ベルト制御部161は、図5(a)の処理に基づいて転写ベルト21の目標速度を設定した後、転写ベルト21の駆動制御へ移行する。図5(b)は第1の実施形態に係る転写ベルト21の駆動制御の手順を示すフローチャートである。図5(b)は、転写ベルト制御部161が当該速度制御をディジタルサンプル制御で行う場合であって、1サンプル時間ごとに転写ベルト制御部161が実行する一連の処理を示している。ここで、ディジタルサンプル制御を用いるのは、累積位置誤差の算出との相性が良いためであるが、他の制御方法を用いてもよい。なお、転写ベルト制御部161は、他の処理と同時進行で実行するために、例えば、割り込み処理を用いて当該処理を実現する。
感光体ドラム5の表面速度の制御について、イエローの感光体ドラム5Yを一例として説明する。なお、他の色に対応した感光体ドラム5M、5C、5Kにおいても、同様の処理により表面速度が制御される。
まず、感光体ドラム制御部162が、感光体ドラム5Yの駆動軸における回転速度の制御を行わない場合を第1の比較例として説明する。図19(a)は、駆動軸の回転速度の制御が行われない場合の、感光体ドラム5Yにおける表面速度及び駆動軸の回転速度の変動の一例を示す図である。ただし、図19(a)の各波形は速度信号を示しいる。また、図の中央に描かれた円は、感光体ドラム5をその回転軸と直交する断面で観察したものであって、破線は停止中の感光体ドラム5の位置を、実線は回転動作中の位置を示している。
露光部2における露光タイミングの制御について、イエローの露光部2Yを一例として説明する。なお、他の色に対応した露光部2M、2C、2Kにおいても、同様の処理によりその動作が制御される。
ΔZ=(ΔA+ΔD)/2=(ΔB+ΔE)/2=(ΔC+ΔF)/2
の関係が存在することがわかる。当該関係に基づいて、例えば、転写位置Aにおける速度信号と駆動軸Zの速度信号とから、露光位置Dにおける速度信号を、
ΔD=2・ΔZ−ΔA
により算出することが可能である。なお、当該関係は、ロータリエンコーダ等において、180度対向した位置に設置した検出器による出力信号同士の平均化により偏心成分をキャンセルする手法にも応用されている。また、上述の速度検出器12Y又は速度推定器13Yによる処理は、第3の検出手段による処理に相当する。
次に、図8を参照して、本発明の第2の実施形態について説明する。第1の実施形態に係る画像形成装置では、図3(a)に示すように、感光体ドラム5の下部に速度検出器11aを設置して、転写位置における感光体ドラム5の表面速度を当該検出器により直接検出した。しかしながら、画像形成装置の構造上の問題等により、当該位置に速度検出器を設置できない場合も想定される。そこで、第2の実施形態では、転写位置と異なる位置に速度検出器を設置するとともに、その検出結果を用いて転写位置及び露光位置における感光体ドラム5の表面速度を推定することを特徴とする。
y=ΔE−ΔZ=Am・sin(ωt)
ただし、Amは偏心成分の振幅、ωは駆動軸の角速度である。また、転写位置Aと速度検出器Eとの間の位相角をθとすると、転写位置Aは、位置Eに対して、感光体ドラム5の駆動軸の回転に対して角度θだけ位相が遅れているため、転写位置Aにおける偏心による速度変動y’は、
y’=Am・sin(ωt+θ)
と表現される。ここで、
y’=ΔA−ΔE
であるので、転写位置Aにおける表面速度ΔAは、
ΔA=ΔZ+Am・sin(ωt+θ)
と算出される。同様にして、露光位置Dでの表面速度ΔDは、
ΔD=ΔZ+Am・sin(ωt+θ+π)
と算出される。
ΔZ=(ΔB+ΔE)/2
と簡易に求められる。すなわち、180度対向した位置における表面速度ΔB及びΔEの平均化により、偏心成分がキャンセルされ、感光体ドラム5の駆動軸Zの回転速度ΔZが算出される。さらに、ΔZの算出結果に基づいて、図8(a)と同様の方法により、転写位置A及び露光位置Dにおける表面速度が、
ΔA=(ΔB+ΔE)/2+Am・sin(ωt+θ)
ΔD=(ΔB+ΔE)/2+Am・sin(ωt+θ+π)
と算出される。
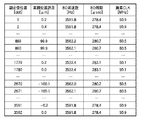
次に、図9乃至図12を参照して、本発明の第3の実施形態について説明する。第1及び第2の実施形態では、露光源としてLEDヘッドを用いるとともに、露光位置における感光体ドラム5の表面速度に応じて、副走査方向に一定の間隔で露光が行われるための露光タイミングを制御する。第3の実施形態では、露光源としてスキャナ系を用いた画像形成装置において、スキャナモータの回転速度を制御することにより、副走査方向における露光の間隔を一定の間隔に近づけるとともに、主走査方向に対する露光の走査時間及び走査周波数を適切に設定することを特徴とする。
L=75.4/25.4*1200=3562.1(本)
である。従って、偏心成分が存在しない場合には、
T=1/L=280.7(μsec)
ごとに、1ラインの露光が開始されればよい。また、定常状態におけるBD周期は、280.7(μsec)であればよい。
Δx(μm)=100*sin(ωt)
と表される(1201)。
Δv(mm/sec)=0.1/ω*cos(ωt)
となる。露光位置における感光体ドラム5の表面速度(露光面速度)vの平均速度は75.4(mm/sec)であるので、
v(mm/sec)=75.4+Δv=75.4+0.1/ω*cos(ωt)
と求められる(1202)。
fbd(Hz)=3562.1+k1*cos(ωt)
と換算される(1204)。
fclk(MHz)=50.9+k2*cos(ωt)
となる(1205)。なお、図12は、以上の処理により取得された数値の一例を示す図である。
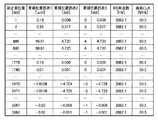
次に、図13乃至図17を参照して、本発明の第3の実施形態について説明する。第4の実施形態に係る画像形成装置では、第3の実施形態と同様、露光源として多面鏡ポリゴンによるスキャナ系を用いる。また、第4の実施形態に係る画像形成装置は、スキャナモータの回転速度を一定の速度に近づけることにより、第3の実施形態のような主走査方向の走査時間及び走査周波数の設定は必要とせず、画像データに対する画像処理によって副走査方向の位置ずれを補正することを特徴とする。
Δx(μm)=100*sin(ωt)
と表される。ここで、副走査ピッチ1200dpiの場合、1dotの間隔は約21.2μmであるので、Δxの振幅(100μm)の変動は、図15に示すように約4.7dotに相当する。なお、図16は、以上の処理により取得された数値の一例を示す図である。本実施形態において、露光制御部163は、Δxの変動に基づいて、露光対象の画像データの補正及び露光強度の補正を行うことにより、感光体ドラム5Y上に静電潜像を一定の間隔で形成し、感光体ドラム5Yの表面速度の変動による位置ずれを解消する。以下では、図17を用いて当該補正方法について説明する。
Ph(N)=(1−0.25)*P(N)
Ph(N+1)=0.25*P(N+1)
による階調の補正が実行される。
Claims (8)
- 像担持体と、画像データに基づいて前記像担持体の表面を露光することで静電潜像を形成する露光手段と、前記像担持体に形成された静電潜像を現像剤により現像する現像手段と、前記現像手段により現像された現像剤像が転写される中間転写体とを備える画像形成装置であって、
前記像担持体から前記中間転写体へ前記現像剤像が転写される転写位置における前記中間転写体の表面速度を検出する第1の検出手段と、
前記転写位置における前記中間転写体の表面速度が、予め定められた目標速度に近づくように、前記第1の検出手段による検出結果に基づいて前記中間転写体の駆動を制御する第1の制御手段と、
前記転写位置における前記像担持体の表面速度を検出する第2の検出手段と、
前記転写位置における前記像担持体の表面速度が、前記転写位置における前記中間転写体の表面速度と同一の速度に近づくように、前記第2の検出手段による検出結果に基づいて前記像担持体の駆動を制御する第2の制御手段と、
前記露光手段から前記像担持体へ露光される露光位置における前記像担持体の表面速度を検出する第3の検出手段と、
前記露光手段によって、前記像担持体に対して露光する副走査方向の間隔が一定の間隔に近づくように、前記第3の検出手段による検出結果に基づいて、前記露光手段による露光のタイミングを制御する第3の制御手段と、
前記像担持体の駆動軸の回転速度を検出する第4の検出手段とを備え、
前記第3の検出手段は、前記第4の検出手段による検出結果と、前記第2の検出手段による検出結果とに基づいて、前記露光位置における前記像担持体の表面速度を推定する手段を備えることを特徴とする画像形成装置。 - 前記転写位置の近傍に設けられ、前記中間転写体の表面速度を検出するための第1の速度センサと、
前記転写位置を挟んで前記第1の速度センサと対向する位置に設けられ、前記中間転写体の表面速度を検出するための第2の速度センサと
を更に備え、
前記第1の検出手段は、
前記第1の速度センサによる検出結果と、前記第2の速度センサによる検出結果とに基づいて、前記転写位置における前記中間転写体の表面速度を推定する手段を備えることを特徴とする請求項1に記載の画像形成装置。 - 像担持体と、画像データに基づいて前記像担持体の表面を露光することで静電潜像を形成する露光手段と、前記像担持体に形成された静電潜像を現像剤により現像する現像手段と、前記現像手段により現像された現像剤像が転写される中間転写体とを備える画像形成装置であって、
前記像担持体から前記中間転写体へ前記現像剤像が転写される転写位置における前記中間転写体の表面速度を検出する第1の検出手段と、
前記転写位置における前記中間転写体の表面速度が、予め定められた目標速度に近づくように、前記第1の検出手段による検出結果に基づいて前記中間転写体の駆動を制御する第1の制御手段と、
前記転写位置における前記像担持体の表面速度を検出する第2の検出手段と、
前記転写位置における前記像担持体の表面速度が、前記転写位置における前記中間転写体の表面速度と同一の速度に近づくように、前記第2の検出手段による検出結果に基づいて前記像担持体の駆動を制御する第2の制御手段と、
前記露光手段から前記像担持体へ露光される露光位置における前記像担持体の表面速度を検出する第3の検出手段と、
前記露光手段によって、前記像担持体に対して露光する副走査方向の間隔が一定の間隔に近づくように、前記第3の検出手段による検出結果に基づいて、前記露光手段による露光のタイミングを制御する第3の制御手段と、
前記像担持体の駆動軸の回転速度を検出する第4の検出手段と、
前記転写位置及び前記露光位置と異なる位置における前記像担持体の表面速度を検出するための第1の速度センサとを備え、
前記第2の検出手段は、前記第4の検出手段による検出結果と、前記第1の速度センサによる検出結果とに基づいて、前記転写位置における前記像担持体の表面速度を推定する手段を備え、
前記第3の検出手段は、前記第4の検出手段による検出結果と、前記第1の速度センサによる検出結果とに基づいて、前記露光位置における前記像担持体の表面速度を推定する手段を備えることを特徴とする画像形成装置。 - 前記転写位置の近傍に設けられ、前記中間転写体の表面速度を検出するための第2の速度センサと、
前記転写位置を挟んで前記第2の速度センサと対向する位置に設けられ、前記中間転写体の表面速度を検出するための第3の速度センサと
を更に備え、
前記第1の検出手段は、
前記第2の速度センサによる検出結果と、前記第3の速度センサによる検出結果とに基づいて、前記転写位置における前記中間転写体の表面速度を推定する手段を備えることを特徴とする請求項3に記載の画像形成装置。 - 前記第3の制御手段は、
前記第3の検出手段による検出結果に基づいて、前記像担持体に対する副走査方向の露光の間隔が一定の間隔に近づくように、主走査方向に対する各ラインの露光の開始タイミングを算出する手段と、
前記第3の検出手段による検出結果に基づいて、当該主走査方向に対する各ラインの露光の走査時間及び走査周波数を算出する手段とを備え、
決定した前記開始タイミング、前記走査時間及び前記走査周波数に基づいて、前記露光手段を制御することを特徴とする請求項1乃至4の何れか1項に記載の画像形成装置。 - 前記第3の制御手段は、
前記露光手段による露光のタイミングの制御に代えて、
前記第3の検出手段による検出結果に基づいて得られる副走査方向における位置のずれを解消するために、前記画像データを補正することにより、露光強度を制御することを特徴とする請求項1乃至4の何れか1項に記載の画像形成装置。 - 像担持体と、画像データに基づいて前記像担持体の表面を露光することで静電潜像を形成する露光手段と、前記像担持体に形成された静電潜像を現像剤により現像する現像手段と、前記現像手段により現像された現像剤像が転写される中間転写体とを備える画像形成装置の制御方法であって、
前記像担持体から前記中間転写体へ前記現像剤像が転写される転写位置における前記中間転写体の表面速度を検出する第1の検出ステップと、
前記転写位置における前記中間転写体の表面速度が、予め定められた目標速度に近づくように、前記第1の検出ステップによる検出結果に基づいて前記中間転写体の駆動を制御する第1の制御ステップと、
前記転写位置における前記像担持体の表面速度を検出する第2の検出ステップと、
前記転写位置における前記像担持体の表面速度が、前記転写位置における前記中間転写体の表面速度と同一の速度に近づくように、前記第2の検出ステップによる検出結果に基づいて前記像担持体の駆動を制御する第2の制御ステップと、
前記像担持体の駆動軸の回転速度を検出する第3の検出ステップと、
前記第3の検出ステップによる検出結果と、前記第2の検出ステップによる検出結果とに基づいて、前記露光手段から前記像担持体へ露光される露光位置における前記像担持体の表面速度を検出する第4の検出ステップと、
前記露光手段によって、前記像担持体に対して露光する副走査方向の間隔が一定の間隔に近づくように、前記第4の検出ステップによる検出結果に基づいて、前記露光手段による露光のタイミングを制御する第3の制御ステップと
を実行することを特徴とする画像形成装置の制御方法。 - 像担持体と、画像データに基づいて前記像担持体の表面を露光することで静電潜像を形成する露光手段と、前記像担持体に形成された静電潜像を現像剤により現像する現像手段と、前記現像手段により現像された現像剤像が転写される中間転写体とを備える画像形成装置の制御方法であって、
前記像担持体から前記中間転写体へ前記現像剤像が転写される転写位置における前記中間転写体の表面速度を検出する第1の検出ステップと、
前記転写位置における前記中間転写体の表面速度が、予め定められた目標速度に近づくように、前記第1の検出ステップによる検出結果に基づいて前記中間転写体の駆動を制御する第1の制御ステップと、
前記像担持体の駆動軸の回転速度を検出する第2の検出ステップと、
前記第2の検出ステップによる検出結果と、前記転写位置及び前記露光手段から前記像担持体へ露光される露光位置とは異なる位置における前記像担持体の表面速度を検出するための速度センサによる検出結果とに基づいて、前記転写位置における前記像担持体の表面速度を検出する第3の検出ステップと、
前記転写位置における前記像担持体の表面速度が、前記転写位置における前記中間転写体の表面速度と同一の速度に近づくように、前記第3の検出ステップによる検出結果に基づいて前記像担持体の駆動を制御する第2の制御ステップと、
前記第2の検出ステップによる検出結果と、前記速度センサによる検出結果とに基づいて、前記露光位置における前記像担持体の表面速度を検出する第4の検出ステップと、
前記露光手段によって、前記像担持体に対して露光する副走査方向の間隔が一定の間隔に近づくように、前記第4の検出ステップによる検出結果に基づいて、前記露光手段による露光のタイミングを制御する第3の制御ステップと
を実行することを特徴とする画像形成装置の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009234644A JP5438457B2 (ja) | 2009-10-08 | 2009-10-08 | 画像形成装置及びその制御方法 |
| US12/894,761 US8626041B2 (en) | 2009-10-08 | 2010-09-30 | Image forming apparatus and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009234644A JP5438457B2 (ja) | 2009-10-08 | 2009-10-08 | 画像形成装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011081270A JP2011081270A (ja) | 2011-04-21 |
| JP2011081270A5 JP2011081270A5 (ja) | 2012-11-22 |
| JP5438457B2 true JP5438457B2 (ja) | 2014-03-12 |
Family
ID=43854945
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009234644A Expired - Fee Related JP5438457B2 (ja) | 2009-10-08 | 2009-10-08 | 画像形成装置及びその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8626041B2 (ja) |
| JP (1) | JP5438457B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5661342B2 (ja) * | 2010-06-10 | 2015-01-28 | キヤノン株式会社 | 画像形成装置 |
| JP2012160905A (ja) * | 2011-01-31 | 2012-08-23 | Canon Inc | 画像形成装置 |
| JP5741044B2 (ja) * | 2011-02-15 | 2015-07-01 | 株式会社リコー | 光書き込み装置、画像形成装置及び光書き込み装置の制御方法 |
| JP2013041047A (ja) * | 2011-08-12 | 2013-02-28 | Sharp Corp | カラー画像形成装置、および色ズレ調整方法 |
| KR101825485B1 (ko) | 2011-12-13 | 2018-02-06 | 에스프린팅솔루션 주식회사 | 멀티패스 컬러 화상형성장치 및 그 제어방법 |
| JP6089409B2 (ja) | 2012-02-13 | 2017-03-08 | 株式会社リコー | 画像形成装置および画像形成装置の制御方法 |
| JP6011279B2 (ja) * | 2012-11-27 | 2016-10-19 | 株式会社リコー | 画像形成装置および画像形成方法 |
| JP2016001268A (ja) * | 2014-06-12 | 2016-01-07 | キヤノン株式会社 | 画像形成装置 |
| JP2016148796A (ja) * | 2015-02-13 | 2016-08-18 | キヤノン株式会社 | 画像形成装置 |
| KR20170013103A (ko) * | 2015-07-27 | 2017-02-06 | 에스프린팅솔루션 주식회사 | 화상형성장치 및 이에 사용되는 노광유닛 제어방법 |
| JP6743444B2 (ja) * | 2016-03-24 | 2020-08-19 | 富士ゼロックス株式会社 | 回転情報検出装置及びこれを用いた回転制御装置、画像形成装置 |
| JP6957955B2 (ja) * | 2017-04-21 | 2021-11-02 | 富士フイルムビジネスイノベーション株式会社 | 回転体、用紙搬送装置、定着装置及び画像形成装置 |
| JP2019123189A (ja) * | 2018-01-18 | 2019-07-25 | キヤノン株式会社 | 画像形成装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6259977A (ja) * | 1985-09-10 | 1987-03-16 | Canon Inc | 画像形成装置 |
| JP3186610B2 (ja) * | 1996-07-08 | 2001-07-11 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP3499715B2 (ja) | 1997-06-05 | 2004-02-23 | 富士通株式会社 | 印刷装置 |
| JP2000172148A (ja) * | 1998-12-03 | 2000-06-23 | Oki Data Corp | 画像形成装置 |
| JP4068269B2 (ja) * | 1999-02-09 | 2008-03-26 | 富士ゼロックス株式会社 | 画像形成装置 |
| JP3551066B2 (ja) | 1999-03-02 | 2004-08-04 | 松下電器産業株式会社 | カラー画像形成装置 |
| JP2004317538A (ja) * | 2003-04-11 | 2004-11-11 | Canon Inc | 画像形成装置 |
| JP4568051B2 (ja) * | 2003-09-18 | 2010-10-27 | 株式会社リコー | 画像形成装置 |
| JP4928744B2 (ja) * | 2004-07-01 | 2012-05-09 | 株式会社リコー | 画像形成装置及び画像転写方法 |
| JP4486010B2 (ja) * | 2005-08-29 | 2010-06-23 | 株式会社リコー | 駆動制御装置、駆動制御方法および画像形成装置 |
| JP4778807B2 (ja) * | 2006-02-17 | 2011-09-21 | 株式会社リコー | 画像形成装置 |
| US7693468B2 (en) * | 2006-04-28 | 2010-04-06 | Ricoh Company, Ltd. | Image forming apparatus capable of effectively forming a quality color image |
| JP5124199B2 (ja) * | 2007-08-01 | 2013-01-23 | 株式会社リコー | 画像形成装置 |
| JP2009128811A (ja) * | 2007-11-27 | 2009-06-11 | Kyocera Mita Corp | 画像形成装置 |
-
2009
- 2009-10-08 JP JP2009234644A patent/JP5438457B2/ja not_active Expired - Fee Related
-
2010
- 2010-09-30 US US12/894,761 patent/US8626041B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011081270A (ja) | 2011-04-21 |
| US20110085827A1 (en) | 2011-04-14 |
| US8626041B2 (en) | 2014-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5438457B2 (ja) | 画像形成装置及びその制御方法 | |
| US7587157B2 (en) | Image forming apparatus capable of correcting a rotation speed of an image carrier | |
| US6507713B2 (en) | Image-formation apparatus, controlling method thereof and image-formation method | |
| JP4980733B2 (ja) | 画像形成装置 | |
| JP2002014507A (ja) | 画像形成装置 | |
| US20050042001A1 (en) | Offset preventing color image forming apparatus | |
| JP2006047920A (ja) | 画像形成装置 | |
| JP4831601B2 (ja) | 画像形成装置 | |
| US8412063B2 (en) | Image forming apparatus that performs image stabilization control | |
| US20060093410A1 (en) | Image forming apparatus and method for controlling the same | |
| JP5039433B2 (ja) | 画像形成装置 | |
| JP2014119648A (ja) | 画像形成装置 | |
| JP5137677B2 (ja) | カラー画像形成装置 | |
| JP6311978B2 (ja) | 画像形成装置 | |
| JP4735543B2 (ja) | 画像形成装置及び画像処理方法 | |
| JP4257767B2 (ja) | 画像形成装置 | |
| JP2014119649A (ja) | 画像形成装置 | |
| JP6748500B2 (ja) | 画像形成装置 | |
| JP2001337561A (ja) | 画像形成装置およびその制御方法 | |
| JP2005083836A (ja) | マーク検出装置、ベルト搬送装置及び画像形成装置 | |
| JP5661342B2 (ja) | 画像形成装置 | |
| JP2001350387A (ja) | 画像形成装置および画像形成方法 | |
| JP2018010153A (ja) | 画像形成装置 | |
| JP2002258574A (ja) | 画像形成装置、画像形成方法、画像形成方法をコンピュータに実行させるプログラム、およびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2005091942A (ja) | 転写ユニットおよび画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20121003 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131002 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131213 |
|
| LAPS | Cancellation because of no payment of annual fees |