JP5431006B2 - ワイヤレス・データ送受信システム - Google Patents
ワイヤレス・データ送受信システム Download PDFInfo
- Publication number
- JP5431006B2 JP5431006B2 JP2009099764A JP2009099764A JP5431006B2 JP 5431006 B2 JP5431006 B2 JP 5431006B2 JP 2009099764 A JP2009099764 A JP 2009099764A JP 2009099764 A JP2009099764 A JP 2009099764A JP 5431006 B2 JP5431006 B2 JP 5431006B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- data transmission
- rotation angle
- tightening
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/0078—Reaction arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B23/00—Details of, or accessories for, spanners, wrenches, screwdrivers
- B25B23/14—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers
- B25B23/147—Arrangement of torque limiters or torque indicators in wrenches or screwdrivers specially adapted for electrically operated wrenches or screwdrivers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0095—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes measuring work or mechanical power
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C19/00—Electric signal transmission systems
- G08C19/38—Electric signal transmission systems using dynamo-electric devices
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C25/00—Arrangements for preventing or correcting errors; Monitoring arrangements
- G08C25/02—Arrangements for preventing or correcting errors; Monitoring arrangements by signalling back receiving station to transmitting station
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B13/00—Spanners; Wrenches
- B25B13/48—Spanners; Wrenches for special purposes
- B25B13/488—Spanners; Wrenches for special purposes for connections where two parts must be turned in opposite directions by one tool
Description
この問題を解決するためにボルト、ナット、ネジ等の締付機に、締付トルクを検出して表示する締付トルク測定ユニットを具えたものが提案されている(例えば、特許文献1参照)。
しかしながら現状のトルク勾配法により締付けを行う締付機は、上記のようにトルクについては動力機の電流値を、回転角度については締付時間を指標としていることからナットの回転角度に対するトルクの勾配ではなく、締付時間に対する動力機の電流値の勾配を検出し、その値の変化を指標として制御を行なっており、精度にバラツキが発生する。また、締付確認は数本のボルトを実際に締付けその時の締付時間に対する動力機の電流値をグラフ化して行っているが都度締付時間と電流値を検出する装置を締付機に接続する必要がある。
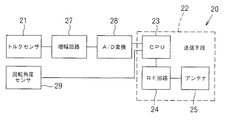
締付機の回転軸上に設けられ、トルクを検出する機能を有するデータ送信ユニットであって、回転軸に作用するトルクを検知可能に配備されるトルクセンサと、該トルクセンサに電気的に接続され、トルクセンサにて検出されたトルクに関する信号をワイヤレス送信する送信手段と、を有するデータ送信ユニットと、
前記データ送信ユニットの送信手段から送信されたトルクに関する信号を受信する受信手段と、該受信手段が受信したトルクに関する信号を表示する表示手段と、を有するデータ受信ユニットと、
を具備する。
締付機の回転軸上に設けられ、回転角度を検出する機能を有するデータ送信ユニットであって、回転軸の回転角度を検知可能に配備される回転角度センサと、該回転角度センサに電気的に接続され、回転角度センサにて検出された回転角度に関する信号をワイヤレス送信する送信手段と、を有するデータ送信ユニットと、
前記データ送信ユニットの送信手段から送信された回転角度に関する信号を受信する受信手段と、該受信手段が受信した回転角度に関する信号を表示する表示手段と、を有するデータ受信ユニットと、
を具備する。
回転軸に作用する締付トルクを直接検出して表示できることから、改めて実際の締付トルクを実測して確認する必要がなくなる。また、回転角度についても回転軸の回転角度を直接検出して表示できることから締付後に回転角度を実測する必要がなくなる。
なお、本明細書において、締付機(50)の「回転軸(52)」とは、一軸の場合の回転軸や、その回転に伴い回転する種々の軸を含み、背景技術に示したような内軸と外軸からなる二軸の締付機(50)の場合には、これら軸や、その回転に伴い回転する種々の軸を含む。回転軸(52)には、反力受け(53)が取り付けられる場合もある。
回転軸(52)に生じたトルクの変化は、トルクセンサ(21)からトルクに関する信号として出力される。例えば、歪みゲージの場合、回転軸(52)に生じたトルクの変化は、抵抗変化として検知され、電圧変化として出力される。
回転軸(52)の回転角度は、回転角度センサ(29)から回転角度に関する信号として出力される。例えば、エンコーダの場合、回転軸(52)の回転角度に関する信号として、エンコーダパルスが出力される。また、ジャイロセンサの場合、絶対角速度出力が回転軸(52)の回転角度に関する信号として出力される。フォトインターラプタの場合、回転軸(52)の回転が、発光部の発した光を受光部が検知することで、デジタル信号として出力される。
同様に、受信された回転角度に関する信号も、アンテナ(35)及びRF回路(34)を介して、CPU(33)に送信され、回転角度に関する信号を回転角度値に変換したり、回転角度に基づく種々の制御、記憶、管理、出力等を行なうことができる。
受信されたトルク及び回転角度に関する信号は、受信手段(32)と電気的に接続された表示手段(40)に表示することができる。これにより、受信したトルクに関する信号及び回転角度に関する信号を、トルク値や角度値として目視できる。
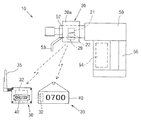
図1に示すように、データ受信ユニット(30)は、締付機(50)と一体に設けることができる。なお、この場合、データ受信ユニット(30)は、締付機(50)の回転軸(52)を回転させる動力機(例えば、モータ(54))に電源を供給する電源線上に設け、動力機を制御する制御回路と受信手段(32)とを電気的に接続することが望ましい。これにより、受信手段(32)が受信したトルクに関する信号及び/又は回転角度に関する信号に基づいて、動力機(モータ(54))をフィードバック制御等することができる。
表示手段(40)を具えたデータ受信ユニット(30)は、所望の文字の大きさ、形状のものを作製することができ、表示されるトルク値及び/又は回転角度の大きさ、色、表示時間等も適宜設定することができる。また、腕時計の如き形状としてもよい。
表示手段(40)の電源は、データ送信ユニット(20)とは別個に配備できるから、データ送信ユニット(20)に配備される電池等を小型化、長寿命化することができる。
図4に示すように、締付機は、電動のものに限らず、手動の締付機(50)にも適用できる。この場合、表示手段(40)は、作業者が見易い位置、例えば、作業者がハンドルを握る部分から締付側のハンドル部(57)に固定することで、作業者が表示手段(40)を目視しながら入力を調節しつつ、所望のトルク値及び/又は回転角度までボルト等を締め付けることができる。
受信されたトルクに関する信号をパソコン(42)で処理することによりトルク値に変換し、ボルト等の締付トルクをパソコン(42)に内蔵又は接続された記憶手段に記憶して管理したり、出力することができる。また、パソコン(42)のモニターを表示手段(40)として利用することもできる。さらに、トルクに関する信号及び/又は回転角度に関する信号を締付機(50)にフィードバックして、締付機(50)を制御することもできる。
データ送信ユニット(20)にGPS(Global Positioning System)機能を搭載することで、例えば、橋梁等のボルト締めの際に、各ボルトが所定のトルク値及び/又は回転角度で締め付けられたことを記録、管理することもできる。また、日時を同時に記録してもよい。
さらに、受信したトルク値及び/又は回転角度をパソコン(42)でグラフ化し、締付過程を監視し、締付時に生ずる異常の有無を判別できるようにしてもよい。
一例として、図9に示すように、締付機(50)に表示手段(40)及び所望の締付トルク及び/又は回転角度を設定するスイッチ(58)を配備し、図10に示すように、データ受信ユニット(30)のCPU(33)に表示手段(40)及び設定スイッチ(58)を連繋し、さらに、締付機(50)のモータ(54)に電力を供給するモータ制御回路(44)とCPU(33)をD/A変換器(46)を介して接続した構成を挙げることができる。
上記によれば、回転軸(52)から直接締付トルクを検知して、モータ(54)を制御できるから、モータの負荷検知により締付トルクを制御するよりも、正確な締付トルクで締付を行なうことができる。
データ送信ユニット(20)は、レンチ(60)の内部に配備され、データ受信ユニット(30)は、締付機(50)側に取り付けられている。
本構成のレンチ(60)を具えた締付機(50)は、締付けの際に、締付トルクがデータ送信ユニット(20)からデータ受信ユニット(30)にワイヤレス送信され、締付トルク及び/又は回転角度を締付機(50)側の表示手段(40)にて目視したり、締付機(50)の動力機となるモータ(54)を受信されたトルク値及び/又は回転角度に基づいて制御することができる。
データ送信ユニット(20)は、増力器(70)の内部に配備され、データ受信ユニット(30)は、レンチ(51)のハンドル部(57)に取り付けられている。
本構成のレンチ(51)は、使用者がハンドル部(57)を掴んで、手動によりボルト等の締付けを行なうことで、締付トルクがデータ送信ユニット(20)からデータ受信ユニット(30)にワイヤレス送信され、締付トルクをハンドル部(57)の表示手段(70)にて目視することができる。
(20) データ送信ユニット
(21) トルクセンサ
(22) 送信手段
(29) 回転角度センサ
(30) データ受信ユニット
(32) 受信手段
(40) 表示手段
(42) パソコン
(50) 締付機
(52) 回転軸
Claims (13)
- 互いに逆方向に回転可能な内軸と外軸から構成される回転軸を有する締付機の内軸上に設けられ、トルクを検出する機能を有するデータ送信ユニットであって、内軸に作用するトルクを検知可能に配備されるトルクセンサと、該トルクセンサに電気的に接続され、トルクセンサにて検出されたトルクに関する信号をワイヤレス送信する送信手段と、を有するデータ送信ユニットと、
前記データ送信ユニットの送信手段から送信されたトルクに関する信号を受信する受信手段と、該受信手段が受信したトルクに関する信号を表示する表示手段と、を有するデータ受信ユニットと、
を具備していることを特徴とするワイヤレス・データ送受信システム。 - 互いに逆方向に回転可能な内軸と外軸から構成される回転軸を有する締付機の内軸上に設けられ、回転角度を検出する機能を有するデータ送信ユニットであって、内軸の回転角度を検知可能に配備される回転角度センサと、該回転角度センサに電気的に接続され、回転角度センサにて検出された回転角度に関する信号をワイヤレス送信する送信手段と、を有するデータ送信ユニットと、
前記データ送信ユニットの送信手段から送信された回転角度に関する信号を受信する受信手段と、該受信手段が受信した回転角度に関する信号を表示する表示手段と、を有するデータ受信ユニットと、
を具備していることを特徴とするワイヤレス・データ送受信システム。 - 互いに逆方向に回転可能な内軸と外軸から構成される回転軸を有する締付機の内軸上に設けられ、トルク及び回転角度を検出する機能を有するデータ送信ユニットであって、内軸に作用するトルクを検知可能に配備されるトルクセンサと、内軸の回転角度を検知可能に配備される回転角度センサと、前記トルクセンサ及び回転角度センサに電気的に接続され、トルクセンサにて検出されたトルク及び回転角度センサにて検出された回転角度に関する信号をワイヤレス送信する送信手段と、を有するデータ送信ユニットと、
前記データ送信ユニットの送信手段から送信されたトルク及び回転角度に関する信号を受信する受信手段と、該受信手段が受信したトルク及び回転角度に関する信号を表示する表示手段と、を有するデータ受信ユニットと、
を具備していることを特徴とするワイヤレス・データ送受信システム。 - データ受信ユニットは、締付機本体に固定されている請求項1乃至請求項3の何れかに記載のワイヤレス・データ送受信システム。
- データ受信ユニットは、締付機の本体側又は本体に電源を供給する電源線上の筺体内に配備され、締付機又は筺体内には、回転軸を回転させる動力機を制御する制御回路を具え、制御回路は、受信手段に電気的に接続されて、受信手段が受信したトルク及び/又は回転角度に関する信号に基づいて、動力機を制御する請求項1乃至請求項3の何れかに記載のワイヤレス・データ送受信システム。
- データ受信ユニットは、受信手段が受信したトルク及び/又は回転角度に関する信号に基づいて、トルク及び/又は回転角度の合否を判断し、その合否を通知する通知手段を有する請求項1乃至請求項5の何れかに記載のワイヤレス・データ送受信システム。
- データ送信ユニットは、複数のアンテナを有する請求項1乃至請求項6の何れかに記載のワイヤレス・データ送受信システム。
- トルクセンサ及び/又は回転角度センサで検出されたトルク及び/又は回転角度に関する信号を蓄積する記憶手段をデータ送信ユニット又はデータ受信ユニットに具備している請求項1乃至請求項7に記載のワイヤレス・データ送受信システム。
- データ送信ユニットは、着脱可能である請求項1乃至請求項8の何れかに記載のワイヤレス・データ送受信システム。
- データ送信ユニットは、データ受信ユニットに対して自機を識別する識別手段を有している請求項1乃至請求項9の何れかに記載のワイヤレス・データ送受信システム。
- 回転軸と動力機との間には、減速機構が配備され、該減速機構を介して動力機から回転軸に回転が伝えられる請求項1乃至請求項10の何れかに記載のワイヤレス・データ送受信システム。
- トルクセンサは、歪みゲージである請求項1、請求項3乃至請求項11の何れかに記載のワイヤレス・データ送受信システム。
- 回転角度センサは、エンコーダ、ジャイロセンサ、フォトインターラプタ又は磁気センサである請求項2乃至請求項11の何れかに記載のワイヤレス・データ送受信システム。
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009099764A JP5431006B2 (ja) | 2009-04-16 | 2009-04-16 | ワイヤレス・データ送受信システム |
| PL10159924T PL2248632T3 (pl) | 2009-04-16 | 2010-04-14 | Bezprzewodowy system nadawania i odbierania danych |
| EP10159924.9A EP2248632B1 (en) | 2009-04-16 | 2010-04-14 | Wireless data transmitting and receiving system |
| TW099111623A TWI495274B (zh) | 2009-04-16 | 2010-04-14 | 無線資料送受訊系統 |
| ES10159924T ES2703763T3 (es) | 2009-04-16 | 2010-04-14 | Sistema inalámbrico de transmisión y recepción de datos |
| US12/759,819 US8264374B2 (en) | 2009-04-16 | 2010-04-14 | Wireless data transmitting and receiving system |
| CA2700038A CA2700038C (en) | 2009-04-16 | 2010-04-15 | Wireless data transmitting and receiving system |
| CN201010228946.5A CN101890691B (zh) | 2009-04-16 | 2010-04-15 | 无线数据收发系统 |
| KR1020100034844A KR101692073B1 (ko) | 2009-04-16 | 2010-04-15 | 무선 데이터 송수신 시스템 |
| HK11100912.2A HK1146815A1 (en) | 2009-04-16 | 2011-01-28 | Wireless data transmitting and receiving system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009099764A JP5431006B2 (ja) | 2009-04-16 | 2009-04-16 | ワイヤレス・データ送受信システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010247277A JP2010247277A (ja) | 2010-11-04 |
| JP2010247277A5 JP2010247277A5 (ja) | 2012-03-01 |
| JP5431006B2 true JP5431006B2 (ja) | 2014-03-05 |
Family
ID=42200932
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009099764A Active JP5431006B2 (ja) | 2009-04-16 | 2009-04-16 | ワイヤレス・データ送受信システム |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US8264374B2 (ja) |
| EP (1) | EP2248632B1 (ja) |
| JP (1) | JP5431006B2 (ja) |
| KR (1) | KR101692073B1 (ja) |
| CN (1) | CN101890691B (ja) |
| CA (1) | CA2700038C (ja) |
| ES (1) | ES2703763T3 (ja) |
| HK (1) | HK1146815A1 (ja) |
| PL (1) | PL2248632T3 (ja) |
| TW (1) | TWI495274B (ja) |
Families Citing this family (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE533830C2 (sv) * | 2009-06-11 | 2011-02-01 | Atlas Copco Tools Ab | Mutterdragare med växelhus och parametergivare |
| TWM392713U (en) * | 2010-07-12 | 2010-11-21 | Legend Lifestyle Products Corp | Wireless torque wrench with angle correction feature |
| CN102528721B (zh) * | 2010-12-29 | 2017-03-01 | 罗伯特·博世有限公司 | 具有减少的无线电传输的数据数量的蓄电池运行的旋拧系统 |
| DE102010056524B4 (de) * | 2010-12-29 | 2019-11-28 | Robert Bosch Gmbh | Tragbares Werkzeug und Verfahren zum Durchführen von Arbeitsvorgängen mit diesem Werkzeug |
| TWI435795B (zh) * | 2011-03-28 | 2014-05-01 | China Pneumatic Corp | 扭矩顯示系統及其方法 |
| CN102706503B (zh) * | 2011-03-28 | 2013-12-25 | 中国气动工业股份有限公司 | 扭矩显示系统及其方法 |
| CN102297739B (zh) * | 2011-05-27 | 2012-12-26 | 杨俊志 | 预应力锚索锚固力实时监测系统 |
| ITMO20110153A1 (it) * | 2011-06-17 | 2012-12-18 | Dino Paoli S R L | Utensile ad impatto |
| ITMO20110154A1 (it) * | 2011-06-17 | 2012-12-18 | Dino Paoli S R L | Utensile ad impatto |
| EP2535139B1 (en) | 2011-06-17 | 2016-04-06 | Dino Paoli S.r.l. | Impact tool |
| DE102011105306A1 (de) * | 2011-06-22 | 2012-12-27 | Robert Bosch Gmbh | Tragbares Werkzeug mit drahtloser Messwertübertragung |
| JP5853191B2 (ja) * | 2011-09-20 | 2016-02-09 | パナソニックIpマネジメント株式会社 | 電動工具 |
| US9272799B2 (en) | 2011-10-04 | 2016-03-01 | Signode Industrial Group Llc | Sealing tool for strap |
| ITMO20110287A1 (it) * | 2011-11-11 | 2013-05-12 | Dino Paoli S R L | Conta cicli |
| DE102012200819A1 (de) * | 2012-01-20 | 2013-07-25 | Robert Bosch Gmbh | Verfahren mit einer Handwerkzeugmaschine und einem mobilen Computer |
| CN103223655B (zh) * | 2012-01-27 | 2017-04-12 | 英格索尔-兰德公司 | 精确紧固的手持无绳电动工具 |
| US9281770B2 (en) | 2012-01-27 | 2016-03-08 | Ingersoll-Rand Company | Precision-fastening handheld cordless power tools |
| DE102012221997A1 (de) | 2012-05-25 | 2013-11-28 | Robert Bosch Gmbh | Elektrowerkzeug |
| US8413525B1 (en) * | 2012-06-11 | 2013-04-09 | Thru Tubing Solutions, Inc. | Portable torque measurement and notification system and method of using same |
| US8528423B1 (en) * | 2012-06-11 | 2013-09-10 | Thru Tubing Solutions, Inc. | Portable torque measurement and notification system and method of using same |
| DE102012017376A1 (de) * | 2012-06-13 | 2013-12-19 | Robert Bosch Gmbh | Werkzeug und Verfahren zu dessen Betrieb |
| TW201411107A (zh) * | 2012-09-12 | 2014-03-16 | wen-hui Liao | 非接觸式扭矩量測裝置及其量測方法 |
| JP6008319B2 (ja) * | 2012-10-12 | 2016-10-19 | パナソニックIpマネジメント株式会社 | インパクト回転工具 |
| CN104661796B (zh) * | 2012-10-26 | 2018-07-03 | 户津胜行 | 自动螺钉拧紧控制方法及装置 |
| US9367062B2 (en) * | 2012-12-31 | 2016-06-14 | Robert Bosch Gmbh | System and method for operational data retrieval from a power tool |
| DE102013202383A1 (de) * | 2013-02-14 | 2014-08-14 | Schaeffler Technologies Gmbh & Co. Kg | Drehmomentmessvorrichtung |
| ITMI20130495A1 (it) * | 2013-03-29 | 2014-09-30 | Atlas Copco Blm Srl | Dispositivo elettronico di controllo e comando per sensori |
| FR3004132B1 (fr) * | 2013-04-03 | 2019-06-21 | Sam Outillage | Ensemble de serrage dynamometrique |
| CN103267605B (zh) * | 2013-05-17 | 2015-10-28 | 大连民族学院 | 一种电动扳手扭角扭矩检测系统及方法 |
| US20150033917A1 (en) * | 2013-08-05 | 2015-02-05 | Xuan-Ren Chen | Torque Multiplier |
| US10131042B2 (en) | 2013-10-21 | 2018-11-20 | Milwaukee Electric Tool Corporation | Adapter for power tool devices |
| JP2015085470A (ja) * | 2013-10-31 | 2015-05-07 | Tone株式会社 | 締緩装置及びその制御方法 |
| JP6322387B2 (ja) * | 2013-11-05 | 2018-05-09 | Tone株式会社 | 締付装置及び締付方法 |
| TWM478149U (zh) * | 2013-12-17 | 2014-05-11 | Matatakitoyo Tool Co Ltd | 無線傳輸式接桿 |
| AU2014373279B2 (en) | 2013-12-26 | 2016-09-22 | Suzhou Tergar Iot Technology Co., Ltd | Center-mounted control system of bicycle |
| US9700978B2 (en) | 2014-01-27 | 2017-07-11 | The Boeing Company | System and method for processing a workpiece |
| CN103825213A (zh) * | 2014-03-04 | 2014-05-28 | 东南大学 | 遥控智能螺栓紧固装置及用于该装置的方法 |
| US20150336248A1 (en) * | 2014-05-20 | 2015-11-26 | Kevin Goe | Power Drill Having Torque Setting Mechanism |
| WO2016062915A1 (en) * | 2014-10-23 | 2016-04-28 | Jukka Jokinen | Method for tightening a high-pressure pipe connection to a correct tightness and a device for carrying out the method |
| EP3234708B1 (en) * | 2014-12-15 | 2021-11-17 | Apex Brands, Inc. | Convertible intelligent power tool |
| DE102015000555A1 (de) | 2015-01-20 | 2016-07-21 | Frank Hohmann | Drehschrauber |
| DE102015204795A1 (de) * | 2015-03-17 | 2016-09-22 | Robert Bosch Gmbh | Gerät mit Anzeigemitteln und Verfahren zum Bereitstellen einer Geräteinformation |
| KR200489917Y1 (ko) | 2015-04-28 | 2019-08-28 | 밀워키 일렉트릭 툴 코포레이션 | 정밀 토크 스크류드라이버 |
| US10357871B2 (en) | 2015-04-28 | 2019-07-23 | Milwaukee Electric Tool Corporation | Precision torque screwdriver |
| US9756402B2 (en) | 2015-05-04 | 2017-09-05 | Milwaukee Electric Tool Corporation | Power tool and method for wireless communication |
| US10603770B2 (en) | 2015-05-04 | 2020-03-31 | Milwaukee Electric Tool Corporation | Adaptive impact blow detection |
| US10295990B2 (en) | 2015-05-18 | 2019-05-21 | Milwaukee Electric Tool Corporation | User interface for tool configuration and data capture |
| KR102074052B1 (ko) | 2015-06-02 | 2020-02-05 | 밀워키 일렉트릭 툴 코포레이션 | 전자 클러치를 갖는 다중-속도 전동 공구 |
| US10618151B2 (en) | 2015-06-15 | 2020-04-14 | Milwaukee Electric Tool Corporation | Hydraulic crimper tool |
| US10339496B2 (en) | 2015-06-15 | 2019-07-02 | Milwaukee Electric Tool Corporation | Power tool communication system |
| CN207096983U (zh) | 2015-06-16 | 2018-03-13 | 米沃奇电动工具公司 | 包括电动工具和外部设备的系统、包括外部设备和服务器的系统和服务器 |
| US20170014984A1 (en) * | 2015-07-16 | 2017-01-19 | Apex Brands, Inc. | High-power lightweight tool |
| CN105070025A (zh) * | 2015-09-10 | 2015-11-18 | 南通大学 | 一种工业用无线扭矩监测系统 |
| US10345797B2 (en) | 2015-09-18 | 2019-07-09 | Milwaukee Electric Tool Corporation | Power tool operation recording and playback |
| WO2017075129A1 (en) * | 2015-10-28 | 2017-05-04 | Ultra Clean Technology | Precision connections and methods of forming same |
| EP3805632B1 (en) | 2015-10-30 | 2023-05-17 | Milwaukee Electric Tool Corporation | Remote light control, configuration, and monitoring |
| US11424601B2 (en) | 2015-11-02 | 2022-08-23 | Milwaukee Electric Tool Corporation | Externally configurable worksite power distribution box |
| US10577137B2 (en) | 2015-12-09 | 2020-03-03 | Signode Industrial Group Llc | Electrically powered combination hand-held notch-type strapping tool |
| WO2017102731A1 (en) * | 2015-12-16 | 2017-06-22 | Atlas Copco Industrial Technique Ab | A system for pre-tensioning a joint comprising a number of threaded elements |
| EP3202537B1 (en) | 2015-12-17 | 2019-06-05 | Milwaukee Electric Tool Corporation | System and method for configuring a power tool with an impact mechanism |
| CN209189930U (zh) | 2016-01-05 | 2019-08-02 | 米沃奇电动工具公司 | 用于电动工具的减振系统 |
| EP3189942A1 (en) * | 2016-01-09 | 2017-07-12 | Chervon (HK) Limited | Power tool system |
| KR102116338B1 (ko) | 2016-02-03 | 2020-06-05 | 밀워키 일렉트릭 툴 코포레이션 | 왕복 톱을 구성하기 위한 시스템들 및 방법들 |
| DK3419791T3 (da) | 2016-02-25 | 2022-07-04 | Milwaukee Electric Tool Corp | Elværktøj indbefattende en udgangspositionssensor |
| TWI622466B (zh) * | 2016-03-29 | 2018-05-01 | Nitto Kohki Co., Ltd. | 具有設定資料傳送功能之電動工具的控制電路、電動工具、控制裝置及電動工具系統 |
| TWI579112B (zh) * | 2016-04-08 | 2017-04-21 | 國立高雄應用科技大學 | 旋轉裝置之扭力檢知器 |
| DE102016206050A1 (de) * | 2016-04-12 | 2017-10-12 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einer elektronischen Drehmomentbegrenzungseinheit |
| TWM555274U (zh) | 2016-06-06 | 2018-02-11 | 米沃奇電子工具公司 | 用以與動力工具裝置作連接的行動裝置 |
| US11622392B2 (en) | 2016-06-06 | 2023-04-04 | Milwaukee Electric Tool Corporation | System and method for establishing a wireless connection between power tool and mobile device |
| US10309855B2 (en) | 2016-08-23 | 2019-06-04 | FUTEK Advanced Sensor Technology | Torque sensing system with wireless two-way communication |
| CN106393009A (zh) * | 2016-08-30 | 2017-02-15 | 常州格力博有限公司 | 电动工具 |
| JP6592190B2 (ja) * | 2016-11-10 | 2019-10-16 | 日東工器株式会社 | 電動工具並びにその制御装置及び制御回路 |
| CN106323518A (zh) * | 2016-11-14 | 2017-01-11 | 苏州卡迪姆电子科技有限公司 | 一种动态扭矩感测装置 |
| CN110072670B (zh) * | 2016-12-15 | 2020-12-25 | 阿特拉斯·科普柯工业技术公司 | 监测拧紧工具中能量流的方法、监测节点及计算机可读存储介质 |
| WO2018123816A1 (ja) * | 2016-12-26 | 2018-07-05 | 京都機械工具株式会社 | トルク値設定システム、トルク値設定装置、及び、トルク値設定方法 |
| KR101879236B1 (ko) * | 2017-03-31 | 2018-07-17 | 주식회사 노아 엑츄에이션 | 토크 측정 장치 |
| TWI619582B (zh) * | 2017-06-09 | 2018-04-01 | China Pneumatic Corp | Torque control system of electric impact type torque tool and torque control method thereof |
| US10940577B2 (en) * | 2017-07-19 | 2021-03-09 | China Pneumatic Corporation | Torque control system and torque control method for power impact torque tool |
| EP3664970A4 (en) | 2017-08-07 | 2021-08-04 | Milwaukee Electric Tool Corporation | POWER TOOL WITH IRREVERSIBLE LOCKING COMPARTMENT |
| JP6982851B2 (ja) * | 2017-08-29 | 2021-12-17 | 京都機械工具株式会社 | 締付作業分析装置、締付作業分析システム、締付作業分析プログラム、締付作業分析方法、締付工具 |
| JP6964870B2 (ja) | 2017-08-29 | 2021-11-10 | 京都機械工具株式会社 | 締付工具 |
| KR101814678B1 (ko) * | 2017-08-31 | 2018-01-03 | (주)효진산업 | 작업대에 구비되는 유압렌치시스템 |
| KR101814681B1 (ko) * | 2017-08-31 | 2018-01-03 | (주)효진산업 | 핸디형 유압렌치 |
| KR101915410B1 (ko) | 2017-08-31 | 2018-11-05 | 형우생 | 소켓의 교체가 용이한 유압렌치 |
| US10926368B2 (en) * | 2017-09-27 | 2021-02-23 | Ingersoll-Rand Industrial U.S., Inc. | Part illumination status lights |
| WO2019108621A1 (en) | 2017-11-29 | 2019-06-06 | Milwaukee Electric Tool Corporation | Externally attachable tracking module for a power tool |
| US20190217460A1 (en) * | 2018-01-18 | 2019-07-18 | Ingersoll-Rand Company | Add-on user interface module for precision power tools |
| US20190232471A1 (en) * | 2018-02-01 | 2019-08-01 | Dino Paoli S.R.L. | Impact tool |
| TWI657899B (zh) * | 2018-02-26 | 2019-05-01 | 車王電子股份有限公司 | electrical tools |
| US11752604B2 (en) * | 2018-04-13 | 2023-09-12 | Snap-On Incorporated | System and method for measuring torque and angle |
| US10341025B1 (en) | 2018-05-01 | 2019-07-02 | FUTEK Advanced Sensor Technology | Optical data system for torque sensor |
| CN108609102A (zh) * | 2018-05-07 | 2018-10-02 | 重庆三叶花科技有限公司 | 用于中轴力矩检测装置的信号传输系统 |
| CN108688765A (zh) * | 2018-05-07 | 2018-10-23 | 重庆三叶花科技有限公司 | 中轴力矩检测装置的信号传输方法 |
| JP7249558B2 (ja) * | 2018-09-07 | 2023-03-31 | パナソニックIpマネジメント株式会社 | 電動工具および処理装置 |
| WO2020057953A1 (en) * | 2018-09-21 | 2020-03-26 | Atlas Copco Industrial Technique Ab | Electric pulse tool |
| TWI666094B (zh) * | 2018-10-04 | 2019-07-21 | 詹鎔穗 | Torque wrench structure |
| JP7038378B2 (ja) * | 2018-10-25 | 2022-03-18 | Tone株式会社 | 電動工具 |
| WO2020163450A1 (en) | 2019-02-06 | 2020-08-13 | Milwaukee Electric Tool Corporation | Power tool with shared terminal block |
| CN110995296B (zh) * | 2019-02-21 | 2021-03-23 | 上海光古电子有限公司 | 短波超短波全自动勘察识别接收机 |
| WO2020217378A1 (ja) * | 2019-04-25 | 2020-10-29 | 京セラ株式会社 | 通信装置、制御方法、及び制御プログラム |
| BR102019012058A2 (pt) * | 2019-06-13 | 2020-12-22 | M3 Health Ind E Comercio De Produtos Medicos Odontologicos E Correlatos S A | torquímetro eletrônico apto para mensurar e enviar dados de leitura via interface sem fio |
| EP3756827A1 (de) * | 2019-06-27 | 2020-12-30 | Hilti Aktiengesellschaft | Verfahren zum betreiben einer werkzeugmaschine und werkzeugmaschine |
| CN112785827B (zh) * | 2019-11-06 | 2023-09-19 | 沈阳新松机器人自动化股份有限公司 | 一种基于网络通讯技术的天线角度控制系统及方法 |
| TWI712467B (zh) * | 2019-11-08 | 2020-12-11 | 國立勤益科技大學 | 智慧型數據感測及扭力分析之動態資料鏈結雲端數值分析及時回饋系統 |
| KR20220113715A (ko) | 2019-11-21 | 2022-08-16 | 밀워키 일렉트릭 툴 코포레이션 | 전동 공구용 삽입형 무선 통신 장치 |
| TWI714367B (zh) * | 2019-11-26 | 2020-12-21 | 炬岱企業有限公司 | 電動油壓脈衝工具之扭矩檢測方法 |
| CN113458766B (zh) * | 2020-03-30 | 2022-10-18 | 广州汽车集团股份有限公司 | 螺栓拧紧设备 |
| CN112936156B (zh) * | 2020-04-14 | 2024-04-16 | 河南牛帕力学工程研究院 | 一种扳手 |
| TWI732586B (zh) * | 2020-06-08 | 2021-07-01 | 中華學校財團法人中華科技大學 | 電動工具之偵測裝置 |
| CA3197899A1 (en) * | 2020-08-31 | 2022-02-28 | Snap-On Incorporated | Wireless torque wrench with torque specifications |
| CN112038869B (zh) * | 2020-09-08 | 2021-10-15 | 江西应用技术职业学院 | 一种协作机器人接口自旋式连接线接入器 |
| TWI794012B (zh) * | 2021-03-18 | 2023-02-21 | 賴士豪 | 扭力扳手 |
| EP4279216A1 (en) * | 2022-05-20 | 2023-11-22 | Hilti Aktiengesellschaft | A method for monitoring a pressing or crimping process |
| WO2024059031A1 (en) * | 2022-09-13 | 2024-03-21 | Apex Brands, Inc. | Wireless clutch sensor |
| EP4353418A1 (en) * | 2022-10-14 | 2024-04-17 | Matatakitoyo Tool Co., Ltd. | Torque sensing arrangement of power tool |
| SE545829C2 (en) * | 2022-10-20 | 2024-02-13 | Atlas Copco Ind Technique Ab | Control device and method for determining a joint identity of a tightened joint |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4210201A1 (de) | 1992-03-28 | 1993-09-30 | Gardner Denver Gmbh | Schrauber, insbesondere Druckluftschrauber |
| DE4307131C2 (de) | 1993-03-06 | 1995-11-16 | Albert Kipfelsberger | Kraftschrauber mit elektronischer Drehmomentbegrenzung |
| EP0651239A3 (en) * | 1993-10-29 | 1996-06-12 | Omron Tateisi Electronics Co | Magnetostrictive torque sensor, magnetostrictive torque measuring device and device for monitoring the state of a cutting tool using this sensor. |
| JPH10329051A (ja) * | 1997-05-23 | 1998-12-15 | Yaskawa Electric Corp | ねじ締め機とその制御方法 |
| DE19846947A1 (de) | 1998-10-12 | 2000-04-13 | Zahnradfabrik Friedrichshafen | Überwachter Druckluftschrauber |
| DE19961374A1 (de) | 1999-12-20 | 2001-06-21 | Volkswagen Ag | Vorrichtung zum Herstellen von Schraubverbindungen |
| DE10137896A1 (de) | 2001-08-02 | 2003-02-20 | Paul-Heinz Wagner | Verfahren zur Steuerung eines intermittierend arbeitenden Schraubwerkzeugs |
| JP4429616B2 (ja) * | 2003-03-24 | 2010-03-10 | 株式会社マキタ | 動力工具 |
| EP1439035A1 (en) * | 2002-12-16 | 2004-07-21 | Fast Technology AG | Signal processing and control device for a power torque tool |
| JP4394983B2 (ja) * | 2004-03-16 | 2010-01-06 | 株式会社東日製作所 | 増締トルク用測定器の検定器 |
| JP3975299B2 (ja) * | 2004-07-08 | 2007-09-12 | 前田金属工業株式会社 | 締付トルク測定ユニット及びトルク表示締付機 |
| CN2730563Y (zh) * | 2004-09-17 | 2005-10-05 | 沈阳黎明航空发动机(集团)有限责任公司 | 无线发射传感式大力矩减速器扳手 |
| DE202007002793U1 (de) * | 2007-02-22 | 2007-05-10 | Eduard Wille Gmbh & Co. Kg | Winkelmesseinrichtung |
| JP2008213085A (ja) * | 2007-03-02 | 2008-09-18 | Matsushita Electric Works Ltd | 電動工具制御システム |
-
2009
- 2009-04-16 JP JP2009099764A patent/JP5431006B2/ja active Active
-
2010
- 2010-04-14 EP EP10159924.9A patent/EP2248632B1/en active Active
- 2010-04-14 US US12/759,819 patent/US8264374B2/en active Active
- 2010-04-14 TW TW099111623A patent/TWI495274B/zh active
- 2010-04-14 ES ES10159924T patent/ES2703763T3/es active Active
- 2010-04-14 PL PL10159924T patent/PL2248632T3/pl unknown
- 2010-04-15 CA CA2700038A patent/CA2700038C/en active Active
- 2010-04-15 KR KR1020100034844A patent/KR101692073B1/ko active IP Right Grant
- 2010-04-15 CN CN201010228946.5A patent/CN101890691B/zh active Active
-
2011
- 2011-01-28 HK HK11100912.2A patent/HK1146815A1/xx unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN101890691B (zh) | 2014-11-19 |
| US8264374B2 (en) | 2012-09-11 |
| TWI495274B (zh) | 2015-08-01 |
| CN101890691A (zh) | 2010-11-24 |
| CA2700038C (en) | 2016-09-20 |
| TW201131995A (en) | 2011-09-16 |
| PL2248632T3 (pl) | 2019-04-30 |
| US20100265097A1 (en) | 2010-10-21 |
| ES2703763T3 (es) | 2019-03-12 |
| HK1146815A1 (en) | 2011-07-15 |
| EP2248632A1 (en) | 2010-11-10 |
| JP2010247277A (ja) | 2010-11-04 |
| KR101692073B1 (ko) | 2017-01-02 |
| EP2248632B1 (en) | 2018-10-17 |
| KR20100114850A (ko) | 2010-10-26 |
| CA2700038A1 (en) | 2010-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5431006B2 (ja) | ワイヤレス・データ送受信システム | |
| US11766770B2 (en) | Powered ratcheting torque wrench | |
| EP1614506B1 (en) | Tightening torque measuring unit and torque indicating tightening device | |
| US7841100B2 (en) | Angle measuring device | |
| KR102433312B1 (ko) | 전동 공구 | |
| EP2440372B1 (en) | Portable power wrench with a gear casing and a parameter sensing device | |
| EP2800959B1 (en) | Assembly, intercalated between a torque tool and a fastening element, for measuring torques and tightening angles | |
| EP3484662A1 (en) | Powered ratcheting torque wrench | |
| US11453105B2 (en) | Powered ratcheting torque wrench | |
| AU2023201362A1 (en) | System and method for measuring torque and angle | |
| JP2010517798A (ja) | 旋回歯車ケーシングを備えた動力レンチ | |
| CN104708298A (zh) | 一种无线传输式接杆 | |
| JP2017087318A (ja) | 締付データ管理システム | |
| CN210361096U (zh) | 动力工具 | |
| KR102059597B1 (ko) | 자가 충전형 무선토크장치 및 이를 이용하는 시스템 | |
| US20230052650A1 (en) | System for chip-removing machining of a workpiece and for measuring and evaluating force and torque during chip-removing machining of the workpiece | |
| US20220395967A1 (en) | Powered ratcheting torque wrench |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130531 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131203 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131204 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5431006 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |