JP5403003B2 - コアレスブラシレスモータ - Google Patents
コアレスブラシレスモータ Download PDFInfo
- Publication number
- JP5403003B2 JP5403003B2 JP2011152447A JP2011152447A JP5403003B2 JP 5403003 B2 JP5403003 B2 JP 5403003B2 JP 2011152447 A JP2011152447 A JP 2011152447A JP 2011152447 A JP2011152447 A JP 2011152447A JP 5403003 B2 JP5403003 B2 JP 5403003B2
- Authority
- JP
- Japan
- Prior art keywords
- yoke member
- coil
- magnetic
- magnetic yoke
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005291 magnetic effect Effects 0.000 claims description 152
- 239000000758 substrate Substances 0.000 claims description 13
- 239000004020 conductor Substances 0.000 claims description 12
- 230000004907 flux Effects 0.000 description 24
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 12
- 239000000696 magnetic material Substances 0.000 description 11
- 230000000694 effects Effects 0.000 description 6
- 229910052742 iron Inorganic materials 0.000 description 6
- 238000003491 array Methods 0.000 description 5
- 230000000052 comparative effect Effects 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images






Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
上記目的を達成するために、本発明によるコアレスブラシレスモータは、
磁性体コアを有さず個別にリング形状に導線が巻き回された複数の電磁コイルを有する少なくとも1組のコイル列を有し、固定体又は移動体として機能する第1の構造部と、
複数の永久磁石を有する磁石列を有し、前記第1の構造部との相対位置が変化可能な第2の構造部と、
を備え、
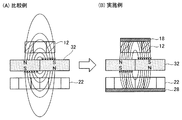
前記コイル列には磁気ヨーク部材が設けられており、前記磁気ヨーク部材は、前記コイル列を挟んで前記磁石列とは反対側に設置されている。
前記コイル列は、前記基板上に設置された前記磁気ヨーク部材の上に設置されているようにしてもよい。
また、前記磁石列には、前記円盤形状に配列された磁石列の外周を覆う第2の磁気ヨーク部材が設けられているようにしてもよい。
A.第1実施例:
B.他の実施例:
C.変形例:
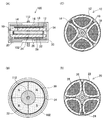
図1(A)は、本発明の第1実施例におけるコアレスブラシレスモータの構成を示す断面図である。このモータは、4極2相モータとして構成されている。
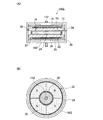
図5は、第2実施例におけるモータの構成を示している。このモータ100aは、図1(A)に示した第1実施例のモータ100の回路基板16と磁気ヨーク部材18の位置を逆にし、また、回路基板26と磁気ヨーク部材28の位置を逆にしたものであり、他の構成は第1実施例と同じである。すなわち、第2実施例のモータ100aでは、A相コイル列12と磁気ヨーク部材18は、回路基板16を挟んで回路基板16の異なる面に設置されている。B相コイル列22と磁気ヨーク部材28も、回路基板26を挟んで回路基板26の異なる面に設置されている。この第2実施例によっても、第1実施例と同様な効果を得ることができる。
なお、この発明は上記の実施例や実施形態に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
上述した実施例では、磁石列の両側にコイル列が設けられていたが、磁石列の片側にのみコイル列を設けるようにしてもよい。但し、磁石列の両側にコイル列が設けるようにすれば、磁石の磁束をより有効に利用することができ、モータ効率を向上させることが可能である。
上述した第1ないし第7実施例では、円盤状のロータ及びステータを有する平面ロータ型モータを説明したが、本発明は、円筒型のロータ及びステータを有するモータなどの種々の構造のモータにも適用可能である。
上記実施例では、2相のコアレスブラシレスDCモータを説明したが、本発明はこれ以外の種々のコアレスブラシレスモータに適用可能である。例えば、極数と相数としては、それぞれ任意の整数を採用することができる。
12…電磁コイル(A相コイル列)
14…磁気センサ(A相磁気センサ)
16…基板(回路基板)
18…磁気ヨーク部材
19…穴
20…第2のステータ部(第1の構造部)
22…電磁コイル(B相コイル列)
24…磁気センサ(B相磁気センサ)
26…回路基板
28…磁気ヨーク部材
30…ロータ部(第2の構造部)
32…永久磁石(磁石列)
34…磁気ヨーク部材
36…磁気ヨーク部材
100…モータ
100L…下部モータ部
100U…上部モータ部
102…ケーシング
104…磁性体粉末層
112…回転軸
1000…リニアモータ
1100…固定ガイド部
1120…レール
1140…ベアリング部
1200…移動部
1250…駆動制御部
Claims (4)
- コアレスブラシレスモータであって、
複数の電磁コイルを含むコイル列を有する円盤状の2つのステータ部と、
前記2つのステータ部の間に、円盤形状に配列され前記電磁コイルの数と同数の永久磁石を含む磁石列を有し、前記ステータ部との相対位置が変化可能な円盤状のロータ部と、
を備え、
前記コイル列には第1の磁気ヨーク部材が設けられており、前記第1の磁気ヨーク部材は、前記コイル列を挟んで前記磁石列とは反対側に設置されており、
前記磁石列には、前記磁石列の為す円盤の外周のみを覆う第2の磁気ヨーク部材が設けられており、
前記第1の磁気ヨーク部材は、分割されており、各電磁コイルのリング形状の中空部分に対応する第1の領域には磁性体が設けられておらず、隣接する各電磁コイル対の隣り合う導線部分に対応する第2の領域には磁性体が設けられており、
前記2つのステータ部のコイル列の電磁コイルは、互いの位相差がπ/2となるように駆動される、コアレスブラシレスモータ。 - 請求項1記載のコアレスブラシレスモータであって、
前記第1の磁気ヨーク部材は、前記コイル列を保持するための基板に設置されており、
前記コイル列は、前記基板上に設置された前記第1の磁気ヨーク部材の上に設置されている、コアレスブラシレスモータ。 - 請求項1記載のコアレスブラシレスモータであって、
前記第1の磁気ヨーク部材は、前記コイル列を保持するための基板に設置されており、
前記コイル列と前記第1の磁気ヨーク部材とは前記基板の第1と第2の面に前記基板を挟んで設置されている、コアレスブラシレスモータ。 - 請求項1〜3のいずれか一項に記載のコアレスブラシレスモータであって、
前記ステータ部を少なくとも3つ有し、
前記ロータ部を少なくとも2つ有し、
前記ヨーク部材は、前記少なくとも3つのステータ部の少なくとも一部に設けられており、
前記ロータ部と前記ステータ部とは交互に配列され、前記少なくとも3つのステータ部のうちの2つは、前記ロータ部と前記ステータ部の配列の両端に配置されており、
前記第1の磁気ヨーク部材は、前記配列の両端に配置されたステータ部のみに設けられ、前記配列の両端以外に配置されたステータ部には設けられていない、ことを特徴とする、コアレスブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011152447A JP5403003B2 (ja) | 2011-07-11 | 2011-07-11 | コアレスブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011152447A JP5403003B2 (ja) | 2011-07-11 | 2011-07-11 | コアレスブラシレスモータ |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006230802A Division JP4984745B2 (ja) | 2006-08-28 | 2006-08-28 | コアレスブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011205893A JP2011205893A (ja) | 2011-10-13 |
| JP5403003B2 true JP5403003B2 (ja) | 2014-01-29 |
Family
ID=44881889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011152447A Expired - Fee Related JP5403003B2 (ja) | 2011-07-11 | 2011-07-11 | コアレスブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5403003B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3454459A4 (en) * | 2016-05-04 | 2019-12-25 | Yu, Renwei | EFFICIENT LAMINATED CORELESS GENERATOR AND PRODUCTION METHOD THEREFOR |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5963436B2 (ja) * | 2011-12-21 | 2016-08-03 | 株式会社ヴァレオジャパン | 電動圧縮機 |
| JP5965527B1 (ja) * | 2015-11-09 | 2016-08-10 | 新明工業株式会社 | コイルレスモータ |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61141979U (ja) * | 1985-02-22 | 1986-09-02 | ||
| JPH01110044A (ja) * | 1987-10-23 | 1989-04-26 | Shicoh Eng Co Ltd | ディスク型単相ブラシレスモータ |
| JP3207251B2 (ja) * | 1992-07-10 | 2001-09-10 | 株式会社東芝 | アキシャルギャップ回転電機 |
| JPH09139016A (ja) * | 1995-11-16 | 1997-05-27 | Tokyo Parts Ind Co Ltd | スピンドルモータのロータ |
| JP2001255485A (ja) * | 2000-03-10 | 2001-09-21 | Fuji Xerox Co Ltd | 光偏向器 |
-
2011
- 2011-07-11 JP JP2011152447A patent/JP5403003B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3454459A4 (en) * | 2016-05-04 | 2019-12-25 | Yu, Renwei | EFFICIENT LAMINATED CORELESS GENERATOR AND PRODUCTION METHOD THEREFOR |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011205893A (ja) | 2011-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5491484B2 (ja) | スイッチドリラクタンスモータ | |
| JP5033552B2 (ja) | アキシャルギャップ型コアレス回転機 | |
| US20100289370A1 (en) | Synchronous motor having 12 stator teeth and 10 rotor poles | |
| JP5703168B2 (ja) | モータ | |
| JP2013215021A (ja) | 電磁誘導装置 | |
| CN103250326A (zh) | 电机和用于该电机的定子 | |
| JP2016538817A (ja) | 横磁束形電気機械 | |
| JP6406355B2 (ja) | ダブルステータ型回転機 | |
| JP2008252979A (ja) | アキシャルギャップ型回転機 | |
| JP2014155373A (ja) | マルチギャップ型回転電機 | |
| JP2010284035A (ja) | 永久磁石回転電機 | |
| JP5403003B2 (ja) | コアレスブラシレスモータ | |
| JP2012249347A (ja) | アキシャルギャップ回転電機のロータ | |
| JP2009509488A (ja) | 電気駆動機械 | |
| JP6415029B2 (ja) | 電磁誘導装置 | |
| JP2014192942A (ja) | 回転機 | |
| JP2015512241A (ja) | 電気機械 | |
| JP4303579B2 (ja) | 三次元ステーター構造の回転機 | |
| JP5965527B1 (ja) | コイルレスモータ | |
| JP2019129563A (ja) | アキシャルギャップ型トランスバースフラックス式回転電機 | |
| JP2008252976A (ja) | アキシャルギャップ型回転機 | |
| JP2012019605A (ja) | 永久磁石回転電機 | |
| JP4984745B2 (ja) | コアレスブラシレスモータ | |
| JP2014192951A (ja) | 回転電気機械、電動機ユニットおよび発電機ユニット | |
| JP5611094B2 (ja) | 回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110801 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110801 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130312 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130502 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131001 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131014 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |