JP5375624B2 - 加速度センサー、及び加速度検出装置 - Google Patents
加速度センサー、及び加速度検出装置 Download PDFInfo
- Publication number
- JP5375624B2 JP5375624B2 JP2010007860A JP2010007860A JP5375624B2 JP 5375624 B2 JP5375624 B2 JP 5375624B2 JP 2010007860 A JP2010007860 A JP 2010007860A JP 2010007860 A JP2010007860 A JP 2010007860A JP 5375624 B2 JP5375624 B2 JP 5375624B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- substrate piece
- support surface
- acceleration
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001133 acceleration Effects 0.000 title claims description 108
- 238000001514 detection method Methods 0.000 title claims description 42
- 239000000758 substrate Substances 0.000 claims description 104
- 230000010355 oscillation Effects 0.000 claims description 6
- 230000035945 sensitivity Effects 0.000 description 15
- 230000000694 effects Effects 0.000 description 14
- 238000000034 method Methods 0.000 description 14
- 239000013078 crystal Substances 0.000 description 11
- 239000010453 quartz Substances 0.000 description 11
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 11
- 230000035882 stress Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 7
- 239000000853 adhesive Substances 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005530 etching Methods 0.000 description 6
- 230000005284 excitation Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 5
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 238000000206 photolithography Methods 0.000 description 4
- 230000001154 acute effect Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 230000008018 melting Effects 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/097—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by vibratory elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/09—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by piezoelectric pick-up
Description
に生じる力の方向を変換すると共に、前記力を増大するように改善した加速度センサー、
及び加速度検出装置に関するものである。
と圧電振動素子の共振周波数が変化し、当該共振周波数の変化から加速度センサーに印加
される加速度を検出するように構成されている。
特許文献1には、フレーム状の平行四辺形枠の一方の対角に双音叉型振動素子を接合し
、他方の対角に圧縮力、又は伸長力を加える構成の加速度計及び製造方法が開示されてい
る。
この加速度計は、図7の断面図に示すように、検知軸119に沿って可動するマス11
6が屈曲部118によって支持体117に結合されるように構成されている。マス116
と支持体117との間に接続された一対の力検知クリスタル121、122は、加えられ
た力に応じて周波数が変動する。これらの力検知クリスタル121、122は、周波数発
振器123、124で励振され、2つの発振器の信号が加算回路126に入力され、2つ
の周波数の差に対応した出力信号を出力する。
加速度計は、水晶(石英結晶)等で形成された5つのディスク状素子が、検知軸に沿っ
て互いに積層されて構成されている。即ち、加速度計は、図8に示す中央素子127と、
中央素子127の両側に配置される図9に示す一対のトランスジューサ素子128と、こ
れらトランスジューサ素子128の両外側の一対の蓋(図示せず)と、を有している。こ
こで、図8(a)は中央素子127の平面図であり、同図(b)はQ−Qにおける断面図
である。
中央素子127は、図8に示すように固定部134と、質量を有する可動部(震性マス
)133とを備えている。可動部33は、検知軸に対して垂直に延びた丁番軸137の回
りに可動できるように、一対の屈曲部136によって固定部134に取りつけられている
。可動部133と固定部134は、該固定部134が取りつけられる載置リング139の
内部に配置される。隔離リング141はこの載置リング139の外側に同心的に配置され
ており、フレキシブルなアームが、載置リング139と隔離リング141とを接続してい
る。中央素子は一体構造として形成されている。
この内部には、力検知素子(クリスタル)147と結合プレート148が配置される。力
検知素子147は、4つのリンク152から成る四辺形フレーム149の一方の相対する
対角に双音叉型圧電振動素子151を連接し、他方の相対する対角にパッド154、15
6を備えている。一方のパッド154は結合プレート148と一体的に形成され、他方の
パッド156は載置リング146と一体的に形成されている。
2つのトランスジューサ素子128の各結合プレート148は、中央素子127の可動
部133の両主表面138と接着剤によって結合され、トランスジューサ素子の載置リン
グ146は接着剤によって中央素子127の載置リング139に接合される。
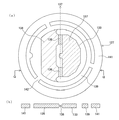
2個の蓋は、その一方の側に窪みを有した円形に形成され、密閉構造となるが、内部に
ガスを入れ制動プレートとしても機能する。窪みは各トランスジューサ素子128に面し
ており、蓋の周辺は接着剤によってトランスジューサ素子128の載置リング146に接
合されている。
つのトランスジューサ素子128と、2つの蓋を用いて構成され、部品点数が多すぎると
いう問題があった。更に、中央素子127及びトランスジューサ素子128は極めて複雑
な構造をしており、これらの素子の歩留まりも低いことが想定され、組み立てられた加速
度の調整に多くの工数を要する虞もあり、加速度計のコストも極めて高価になるという問
題があった。
また、加速度計内部に制動用のガスが封入されているので、トランスジューサ素子12
8の振動素子151のQ値が劣化し、励振しづらいという問題があった。
発明は上記問題を解決するためになされたもので、構造が単純で加速度検出感が高く、
製造コストの低減が可能な加速度センサー、及び加速度検出装置を提供することにある。
形態又は適用例として実現することが可能である。
第1支持面及び第2支持面を有した支持基板と、を備え、前記圧電センサーは、検知軸方
向の力に応じた電気信号を生成する圧電センサー要素と、前記圧電センサー要素を前記支
持基板上に支持するために前記第1及び第2支持面に夫々固定される第1被固定部及び第
2被固定部と、前記圧電センサー要素に対して前記第1被固定部及び前記第2被固定部を
夫々連結する第1乃至第4の梁と、を備え、前記支持基板は、前記第1被固定部を固定す
る前記第1支持面を有する固定側の第1基板片と、該第1支持面の面方向に並置され且つ
前記第2被固定部を支持する前記第2支持面を備えた可動側の第2基板片と、前記第1基
板片と前記第2基板片の対向する側端縁間を連結して該第2基板片を厚さ方向へ揺動させ
る蝶番部と、を備え、前記圧電センサー要素は、前記検知軸方向と直交する方向へ延びる
細長い構成であり、且つ該センサー要素の短手方向中心部が前記蝶番部の短手方向幅内に
位置するように前記蝶番部の長手方向に沿って前記支持面から離間配置されており、前記
第1の梁は、前記第1被固定部と前記圧電センサー要素の長手方向一端部とを連結し、前
記第2の梁は、前記第1被固定部と前記圧電センサー要素の長手方向他端部とを連結し、
前記第3の梁は、前記第2被固定部と前記圧電センサー要素の長手方向一端部とを連結し
、前記第4の梁は、前記第2被固定部と前記圧電センサー要素の他方の端部とを連結する
ことを特徴とする加速度センサーである。
板片と、両者を連結する蝶番とから成る。前記圧電センサーは、第1乃至第4の梁が平行
四辺形のフレーム部を形成し、その一方の対角に第1被固定部及び第2被固定部を有し、
他の対角に圧電センサー要素が連結された構成である。そのため、両者とも平板状の圧電
基板を用い、フォトリソグラフィ技法とエッチング手法を適用して寸法精度の良い支持基
板と圧電センサーとが形成でき、これら用いて小型で低コストの加速度センサーが量産可
能になるという効果がある。その上、加速度センサーは前記第1乃至第4の梁が形成する
フレーム部が加速度印加により生じる力の方向を90度変換すると共に、力を増大するよ
うに作用するので、小さな加速度も検出でき(高感度)、検出精度が高く再現性のある加
速度センサーが得られるという効果がある。
前記第1乃至第4の梁は、夫々全長に渡って同一幅の細幅帯状をなしていることを特徴と
する適用例1に記載の加速度センサーである。
じる力の伝達効率がよく、小さく加速度を再現性よく検出することが可能になるという効
果がある。
とが一体的に形成され、且つ前記第1基板片の前記第1支持面と前記第2基板片の前記第
2支持面とが同一平面上にあることを特徴とする適用例1又は2に記載の加速度センサー
である。
用いて圧電基板から一体的に形成されることにより、各部の寸法が精度よく形成でき、加
速度センサーの検出感度を上げ、検出精度を改善できるという効果がある。また、第1基
板片の第1支持面と第2基板片の第2支持面とを同一平面上にすることは容易であり、支
持基板と圧電センサーとの接着による歪を最小にし、加速度センサーの歩留まりと、検出
精度の再現性を改善するという効果がある。
、前記蝶番部の短手方向幅中心部と一致していることを特徴とする適用例1乃至3の何れ
かに記載の加速度センサーである。
ことにより、加速度センサーの感度(同一の加速度が印加された場合の前記圧電センサー
要素の周波数変化量)が最も良くなるという効果がある。
、前記第1被固定部において前記第1の梁と前記第2の梁とのなす角度、及び前記第2被
固定部において前記第3の梁と前記第4の梁とのなす角度は、夫々鈍角であることを特徴
とする適用例1乃至4の何れかに記載の加速度センサーである。
することにより、第1の梁と第3の梁とのなす角度、及び第2の梁と第4の梁とのなす角
度が鋭角になり、第2基板片に加わる力の方向を90度変換し、且つ力の大きさを増大す
るという効果がある。
第1の梁と第2の梁、及び第3の梁と第4の梁は、夫々コ字状に連結していることを特徴
とする適用例1乃至5の何れかに記載の加速度センサーである。
梁と第2被固定部がいずれもほぼL字状を形成し、第1の梁と第2の梁、及び第3の梁と
第4の梁は、夫々コ字状に連結することにより、第2基板片に加わる力の方向を90度変
換し、且つ力の大きさを増大するという効果がある。
、前記第1の梁と前記第2の梁、及び前記第3の梁と前記第4の梁は、夫々半円状、半楕
円状、或いは半長円状に連結していることを特徴とする適用例1乃至5の何れかに記載の
加速度センサーである。
円状に形成されているので、第2基板片に加わる力の方向を90度変換し、且つ力の大き
さを増大するという効果がある。
び第2の梁の交差部よりも梁の外側に突出し、前記第2被固定部の少なくとも一部は前記
第3及び第4の梁の交差部よりも梁の外側に突出した構成を備えていることを特徴とする
適用例1乃至7の何れかに記載の加速度センサーである。
差部よりも各梁の外側に突出したように形成するので、第2基板片に加わる力を各梁に均
等に伝達するという効果がある。
サーと、前記加速度センサーの圧電センサー要素を励振する発振回路と、前記発振回路の
出力周波数をカウントするカウンターと、前記カウンターの信号を処理する演算回路を有
するICと、表示部と、を備えたことを特徴とする加速度検出装置である。
叉型水晶振動素子として加速度センサーを構成する。該加速度センサーと、各機能を備え
たICとで加速度検出装置を構成すると、加速度検出感度が大幅に改善され、検出精度、
再現性、温度特性、エージング等の優れた加速度検出装置が実現できるという効果がある
。
形態に係る加速度センサー1の構成を示す概略図であり、同図(a)は平面図、同図(b
)はQ−Qにおける断面図である。加速度センサー1は、圧電センサー10と、該圧電セ
ンサー10を支持する第1支持面5a及び第2支持面7aを有した支持基板4と、を備え
ている。
圧電センサー10は、図1(b)に示す検知軸方向9の力に応じた電気信号を生成する
圧電センサー要素20と、圧電センサー要素20を支持基板4上に支持するために、第1
支持面5a及び第2支持面7aに夫々固定される第1被固定部14a及び第2被固定部1
4cと、圧電センサー要素20に対して第1被固定部14a及び第2被固定部14cを夫
々連結する第1の梁乃至第4の梁12a、12b、12c、12dと、を備えている。
第2基板片7と、第1基板片5と第2基板片7とを連結する蝶番部8と、を備えている。
つまり、支持基板4は、圧電センサー10の第1被固定部14aを固定する第1支持面5
aを有する固定側の第1基板片5と、第1支持面5aの面方向(図面横方向)に並置され
、且つ第2被固定部14cを支持する第2支持面7aを備えた可動側の第2基板片7と、
第1基板片5と第2基板片7の対向する側端縁間を連結して該第2基板片を厚さ方向へ揺
動させる蝶番部8と、を備えている。蝶番部8は、第1基板片5及び第2基板片7の厚さ
より薄く形成され、蝶番部8より可撓するように構成されている。蝶番部8の断面形状は
矩形状、台形状、円弧状等であり、厚さ方向の少なくとも一方に形成されている。
第1基板片5及び第2基板片7と蝶番部8とは、一体的に形成され、且つ第1基板片5
の第1支持面5aと第2基板片7の第2支持面7aとが同一平面上にある。
、或いは菱形(フレーム部12と称す)を有しており、一方の対角部に第1被固定部14
a及び第2被固定部14cが配置され、他方の対角部に第1基台部14b及び第2基台部
14dが配置されている。つまり、フレーム部12の第1の梁12aは、第1被固定部1
4aと第1基台部14bとを連結し、第2の梁12bは、第1被固定部14aと第2基台
部14dとを連結している。更に、第3の梁12cは、第2被固定部14cと第1基台部
14bとを連結し、第4の梁12dは、第2被固定部14cと第2基台部14dとを連結
して、第1の梁乃至第4の梁12a〜12dがフレーム状の平行四辺形を形成している。
圧電センサー10の第1被固定部14a及び第2被固定部14cは、支持基板4の第1
支持面5a及び第2支持面7aに固定され、第2基板片7の揺動を第1の梁乃至第4の梁
12a〜12dを介して圧電センサー要素20に伝達するように構成されている。
において第1の梁12aと第2の梁12bとのなす角度、及び第2被固定部14cにおい
て第3の梁12cと第4の梁12dとのなす角度は、夫々鈍角であるように構成する。つ
まり、第1基台部14bにおける第1の梁12aと第3の梁12cとのなす角度θと、第
2基台部14dにおける第2の梁12bと第4の梁12dとのなす角度θと、が鋭角であ
るフレーム部12は、第1被固定部14a及び第2被固定部14cに加わる力の方向を9
0度変換し、力の大きさを増大して圧電センサー要素20に加える働きをする。前記の角
度θにより力の増大率は変化する。
また、第1支持面5a及び第2支持面7aと直交する方向から見た第1の梁乃至第4の
梁12a〜12dは、夫々全長に渡って同一幅の細幅帯状をなしている。
第1被固定部14aの少なくとも一部は第1及び第2の梁12a、12bの交差部よりも梁の外側に突出し、第2被固定部14cの少なくとも一部は第3及び第4の梁12c、12dの交差部よりも梁の外側に突出するように構成する。
bと、一対の基部24a、24bと、を備えた双音叉型圧電振動素子を用いる。圧電セン
サー要素20が、双音叉型圧電振動素子で構成される場合について、図2を用いて簡単に
説明する。
双音叉型圧電振動素子20は、図2(a)に示すような一対の基部24a、24b及び
基部24a、24b間を連設する一対の振動腕22a、22bを備えた圧電基板からなる
応力感応部と、該圧電基板の振動領域上に形成した励振電極と、を備えている。図2(a
)の破線は双音叉型圧電振動素子20の振動姿態を示す平面図である。双音叉型圧電振動
素子20の振動モードが、一対の振動腕22a、22bの長手方向の中心軸に対して、互
いに対称な振動モードで振動するように励振電極を配置する。図2(b)は振動腕22a
、22bに形成した励振電極と、ある瞬間に励起される励振電極上の電荷の符号を示した
平面図である。また、図2(c)は励振電極の結線を示す模式断面図である。
感度が良好であり、高度計用、或いは深度計用の応力感応素子として使用した場合には、
分解能力が優れているために僅かな気圧差から高度差、深度差を知ることができる。
双音叉型水晶振動素子の周波数温度特性は、上に凸の二次曲線であり、その頂点温度は
水晶結晶のX軸(電気軸)の回りの回転角度に依存する。一般的には頂点温度が常温(2
5℃)になるように各パラメータを設定する。
双音叉型水晶振動素子の一対の振動腕に外力Fを加えたときの共振周波数fFは式(1
)のように表わされる。
fF=f0(1−(KL2F)/(2EI))1/2 (1)
ここで、f0は外力がないときの双音叉型水晶振動素子の共振周波数、Kは基本波モー
ドによる定数(=0.0458)、Lは振動ビームの長さ、Eは縦弾性定数、Iは断面2
次モーメントである。断面2次モーメントIはI=dw3/12より、式(1)は式(2
)のように変形することができる。ここで、dは振動ビームの厚さ、wは幅である。
fF=f0(1−SFσ)1/2 (2)
但し、応力感度SFと、応力σとはそれぞれ次式で表される。
SF=12(K/E)(L/w)2 (3)
σ=F/(2A) (4)
ここで、Aは振動ビームの断面積(=w・d)である。
方向)を正としたとき、力Fと共振周波数fFの関係は、力Fが圧縮力で共振周波数fF
が減少し、伸張(引張り)力では増加する。また応力感度SFは振動ビームのL/wの2
乗に比例する。
図1に示した圧電センサー要素20は、上記の水晶基板を用いた双音叉型水晶振動子に
限らず、伸張・圧縮応力によって周波数が変化する振動素子であればどのような振動素子
でもよい。例えば振動体に駆動部を接着した振動素子、シングルビーム振動素子、厚み滑
り振動素子、SAW振動素子等を用いることが可能である。
4cに−X軸方向(図中左方)への力(ベクトル)faが、第1被固定部14aに+X軸
方向(図中右方)への力(ベクトル)fbが、夫々作用するものとする。−X軸方向の力
faは、ベクトルの平行四辺形の法則により、第3の梁12cの方向の力fa2と、第4
の梁12dの方向の力fa1とに分解され、+X軸方向の力fbは、第1の梁12aの方
向の力fb2と、第2の梁12bの方向の力fb1とに分解される。第2被固定部14c
及び第1被固定部14aに作用するこれらの力fa1、fa2、fb1、fb2は、フレ
ーム部12の第1基台部14bに、第3の梁12cの方向の力fa2と第1の梁12aの
方向の力fb2とが、第2基台部14dに、第4の梁12dの方向の力fa1と第2の梁
12bの方向の力fb1とが、作用するのと等価である。
第1基台14bに働く力fa2とfb2を、平行四辺形の法則により合成すると力F2
となる。同様に第2基台14dに働く力fa1とfb1とを合成すると力F1となる。
フレーム12の第1被固定部14a及び第2被固定部14cに作用する力fa、fbは
、第1基台14b及び第2基台14dに作用する力F2とF1と等価である。つまり、フ
レーム部12は、力の方向を90度変換させると共に、力の大きさを増大させる機能を有
している。
軸)方向の加速度α(+Z軸方向)が印加されると、支持基板4の第2支持片7には力F
(=m×α、mは第2支持片7の質量)が働き、この力Fにより第2支持片7は蝶番部8
から−Z軸方向に撓むことになる。第2支持片7が−Z軸方向に撓むと、第1被固定部1
4aは、図示しない基板に支持・固定された第1基板片に固定されているので、+X軸方
向の力が加わる。第2支持片7に固定された第2被固定部14cには、−X軸方向に力が
作用する。つまり、第2被固定部14cには−X軸方向の力fが、第1被固定部14aに
は+X軸方向の力fが、作用することになる。フレーム部12の第1被固定部14a及び
第2被固定部14cに互いに逆向きで同じ大きさの力fがX軸方向に働くと、図3で説明
したように、第1基台部14b及び第2基台部14dにはY軸方向で互いにフレーム部1
2の中心部よりの力Fが働く。この力Fにより、圧電センサー要素20は圧縮力が加わる
。圧電センサー要素20が、例えば双音叉型圧電振動素子の場合にはその周波数が減少す
る。
また、加速度センサー1に−Z軸方向の加速度αが印加されると、第2支持片7は蝶番
部8から+Z軸方向に撓み、圧電センサー要素20には伸長力(引張力)が加わる。圧電
センサー要素20が双音叉型圧電振動素子の場合には、その周波数が増加する。
圧電センサー要素20の周波数の増減により加速度αの方向が検出でき、周波数の変化
量から加速度αの大きさが検出できる。
、第1基板片5と第2基板片7とに支持・固定された圧電センサー10と、の相互の位置
関係を示した要部平面図である。図4(a)は、蝶番部8の長手方向の中心線が、圧電セ
ンサー10の圧電センサー要素20の長手方向の中心線から図中左方にずれた場合の平面
図である。図4(b)は、蝶番部8の長手方向の中心線と、圧電センサー要素20の長手
方向の中心線とが一致する場合の平面図である。図4(c)は蝶番部8の長手方向の中心
線が、圧電センサー要素20の長手方向の中心線から図中右方へずれた場合の平面図であ
る。
図4(a)、(b)、(c)の夫々の場合のセンサー感度(同一の力を加えた場合の周
波数変化度)を有限要素法を用いてシミュレーションした。その結果、図4(b)の場合
が、フレーム部12の各梁に均等に応力が加わり、且つ蝶番部8の中央部に応力が集中し
、センサー感度がもっとも大きいことが判明した。図4(a)、(c)の場合は、フレー
ム部12の各梁に加わる応力は均等ではなく、且つ蝶番部8にかかる応力も中央より端の
方に分散し、センサー感度も小さくなることが判明した。
これに対し、特許第2851566号公報では、該公報の図4に示されているように、
蝶番軸(蝶番の中心線)と、振動枝(双音叉型振動子)の長手方向の中心線とが離れてお
り、本発明の加速度センサーとは大きく異なる。
平行四辺形の場合について説明したが、フレーム部12はこれに限定するものではない。
第1の梁12aと第1被固定部14a、第2の梁12bと第1被固定部14a、第3の梁
12cと第2被固定部14c、第4の梁12dと第2被固定部14cがいずれもほぼL字
状を形成し、第1の梁12aと第2の梁12b、及び第3の梁12cと第4の梁12dは
、夫々コ字状に連結していてもよい。
また、第1の梁乃至第4の梁12a〜12dは、いずれも円弧状とし、第1の梁12a
と第2の梁12b、及び第3の梁12cと第4の梁12dは、夫々半円状、半楕円状、或
いは半長円状に形成されていてもよい。
以上何れの場合も、第2基板片に加わる力の方向を90度変換し、且つ力の大きさを増大
するという効果がある。
定部14cに接着剤30、例えば残留歪の少ない低融点ガラスを塗布し、第1被固定部1
4a及び第2被固定部14cを、支持基板4の第1支持面5a及び第2支持面7aに、接
着固定する。これを密閉容器に入れ、内部を真空にして加速度センサー1を構成する。加
速度センサー1の検出感度を上げるには、第2支持片7の表面に錘を貼り付ける方法があ
る。
支持基板4及び圧電センサー10の製造法の一例は、平板状の圧電基板にフォトリソグ
ラフィ技法とエッチング手段を適用して製造する方法である。更に圧電センサー10の場
合は蒸着法を用いて電極及びリード電極、パッド電極等を形成する。圧電基板としては、
水晶、タンタル酸リチウム、ニオブ酸リチウム、ランガサイト等の圧電基板がある。例え
ば水晶基板(水晶ウエハー)を用いる場合には、フォトリソグラフィ技法とエッチング手
法については長年の実績があり、精度のよい圧電センサー10及び支持基板4の量産化が
容易である。
用いれば、寸法精度の良い支持基板4と圧電センサー10とが形成でき、これらから小型
で低コストの加速度センサー1が量産可能になるという効果がある。その上、加速度セン
サーは第1の梁乃至第4の梁12a〜12dが形成するフレーム部12が加速度印加によ
り生じる力の方向を90度変換すると共に、力の大きさを増大するように作用するので、
小さな加速度も検出できる高感度で、精度が高く再現性のある加速度センサーが得られる
という効果がある。
また、第1の梁乃至第4の梁12a〜12dを同一幅の細幅帯状に形成することにより
、加速度印加により生じる力の伝達効率がよく、小さく加速度を再現性よく検出すること
が可能になるという効果がある。
手法を用いて圧電基板から一体的に形成されることにより、各部の寸法が精度よく形成で
き、加速度センサーの検出感度を上げ、検出精度を改善できるという効果がある。また、
第1基板片5の第1支持面5aと第2基板片7の第2支持面7aとを同一平面上にするこ
とは容易であり、支持基板4と圧電センサー10との接着による歪を最小にし、加速度セ
ンサーの歩留まりと、検出精度の再現性を改善するという効果がある。
また、圧電センサー要素20の短手方向中心部と、蝶番部8の短手方向幅中心部とをほ
ぼ一致させることにより、加速度センサーの感度(同一の加速度が印加された場合の前記
圧電センサー要素の周波数変化量)が最も良くなるという効果がある。
第1の梁12aと第2の梁12bとのなす角度、及び第3の梁12cと第4の梁12d
とのなす角度を鈍角とすることにより、第1の梁12aと第3の梁12cとのなす角度、
及び第2の梁12bと第4の梁12dとのなす角度が鋭角になり、第2基板片7に加わる
力の方向を90度変換し、且つ力の大きさを増大するという効果がある。
また、第1被固定部及第2被固定部14a、14cが、第1及び第2の梁12a、12
bの交差部及び第3及び第4の梁12c、12dの交差部よりも各梁の外側に突出したよ
うに形成するので、第2基板片に加わる力を各梁に均等に伝達するという効果がある。
同図(b)はQ−Qにおける断面図である。図1に示した加速度センサー1と異なる点は
、圧電センサー10の第1被固定部14a及び第2被固定部14cに夫々矩形状の第1板
状基板及び第2板状基板28a、28bを付加した点である。第1板状基板28aは圧電
センサー要素20の励振電極から延在するリード電極(引出電極)の接続位置の自由度を
増し、第2板状基板28bは第2基板片7に接着剤30で接着・固定することにより、第
2基板片7の質量が増し、加速度センサー2の感度を上げる効果がある。
、上記の加速度センサー1と、該加速度センサー1の圧電センサー要素20を励振する発
振回路51と、該発振回路51の出力周波数をカウントするカウンター53と、該カウン
ター53の信号を処理する演算回路55を有するIC50と、表示部56と、を備えた加
速度検出装置である。
支持基板及び前記圧電センサー4、10を、水晶基板を用いて形成し、且つ圧電センサ
ー要素20を双音叉型水晶振動素子として加速度センサーを構成し、該加速度センサーと
、前記各機能を備えたICとで加速度検出装置を構成すると、加速度検出感度が大幅に改
善され、検出精度、再現性、温度特性、エージング等の優れた加速度検出装置が実現でき
るという効果がある。
Claims (10)
- 第1支持面を有している固定用の第1基板片、前記第1基板片と並んで配置されていると共に、第2支持面を有しており、可動用の第2基板片、および前記第1基板片と前記第2基板片との間にあって前記第1基板片と前記第2基板片とに接続されている蝶番部、を備えている支持基板と、
前記第1基板片と前記第2基板片の並び方向に直交する方向に沿って延在しており、かつ平面視において前記蝶番部と重なっている中心部を有している圧電センサー要素、前記第1支持面及び前記第2支持面に夫々固定される第1被固定部及び第2被固定部、および前記第1被固定部及び前記第2被固定部に連結されており前記圧電センサー要素を支持している梁、を備えている圧電センサーと、
を含んでいることを特徴とする加速度センサー。 - 前記梁は、平面視で、前記圧電センサー要素における前記直交する方向にある一端部と前記第1被固定部とを連結している第1の梁、前記圧電センサー要素における前記直交する方向にある他端部と前記第1被固定部とを連結している第2の梁、前記一端部と前記第2被固定部とを連結している第3の梁、および前記他端部と前記第2被固定部とを連結している第4の梁を備えていることを特徴とする請求項1に記載の加速度センサー。
- 前記第1支持面及び第2支持面と直交する方向からの平面視で前記第1乃至第4の梁は、夫々全長に渡って同一幅の細幅帯状をなしていることを特徴とする請求項2に記載の加速度センサー。
- 前記第1基板片及び前記第2基板片と前記蝶番部とが一体的に形成され、且つ前記第1基板片の前記第1支持面と前記第2基板片の前記第2支持面とが同一平面上にあることを特徴とする請求項1又は3に記載の加速度センサー。
- 前記圧電センサー要素の短手方向中心部の位置が、前記第1支持面及び第2支持面と直交する方向からの平面視で前記蝶番部の短手方向幅中心部と一致していることを特徴とする請求項1乃至4の何れかに記載の加速度センサー。
- 前記第1乃至第4の梁は、いずれも直線状であり、
前記第1被固定部において前記第1の梁と前記第2の梁とのなす角度、及び前記第2被固定部において前記第3の梁と前記第4の梁とのなす角度は、夫々鈍角であることを特徴とする請求項2乃至5の何れかに記載の加速度センサー。 - 前記第1乃至第4の梁は、いずれもL字状であり、
前記第1の梁と前記第2の梁、及び前記第3の梁と前記第4の梁は、夫々コ字状に連結していることを特徴とする請求項2乃至6の何れかに記載の加速度センサー。 - 前記第1乃至第4の梁は、いずれも円弧状であり、
前記第1の梁と前記第2の梁、及び前記第3の梁と前記第4の梁は、夫々半円状、半楕円状、或いは半長円状の何れかの状態で連結していることを特徴とする請求項2乃至7の何れかに記載の加速度センサー。 - 前記第1被固定部の少なくとも一部は前記第1及び第2の梁の交差部よりも梁の外側に突出し、前記第2被固定部の少なくとも一部は前記第3及び第4の梁の交差部よりも梁の外側に突出した構成を備えていることを特徴とする請求項2乃至8の何れかに記載の加速度センサー。
- 請求項1乃至9の何れかに記載の加速度センサーと、
前記加速度センサーの圧電センサー要素を励振する発振回路と、前記発振回路の出力周波数をカウントするカウンターと、前記カウンターの信号を処理する演算回路を有するICと、を備えていることを特徴とする加速度検出装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010007860A JP5375624B2 (ja) | 2010-01-18 | 2010-01-18 | 加速度センサー、及び加速度検出装置 |
| US12/985,554 US20110174075A1 (en) | 2010-01-18 | 2011-01-06 | Acceleration sensor and acceleration detecting apparatus |
| CN201110007098XA CN102169128A (zh) | 2010-01-18 | 2011-01-13 | 加速度传感器和加速度检测装置 |
| KR20110004559A KR20110084843A (ko) | 2010-01-18 | 2011-01-17 | 가속도센서 및 가속도 검출장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010007860A JP5375624B2 (ja) | 2010-01-18 | 2010-01-18 | 加速度センサー、及び加速度検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011145243A JP2011145243A (ja) | 2011-07-28 |
| JP2011145243A5 JP2011145243A5 (ja) | 2013-02-28 |
| JP5375624B2 true JP5375624B2 (ja) | 2013-12-25 |
Family
ID=44276537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010007860A Expired - Fee Related JP5375624B2 (ja) | 2010-01-18 | 2010-01-18 | 加速度センサー、及び加速度検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20110174075A1 (ja) |
| JP (1) | JP5375624B2 (ja) |
| KR (1) | KR20110084843A (ja) |
| CN (1) | CN102169128A (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9759739B2 (en) * | 2011-02-02 | 2017-09-12 | Honeywell International Inc. | MEMS vibrating-beam accelerometer with piezoelectric drive |
| JP5678741B2 (ja) * | 2011-03-11 | 2015-03-04 | セイコーエプソン株式会社 | 加速度検出器、加速度検出デバイス及び電子機器 |
| JP2012242343A (ja) * | 2011-05-24 | 2012-12-10 | Seiko Epson Corp | 加速度センサー及び加速度検出装置 |
| WO2013161598A1 (ja) * | 2012-04-27 | 2013-10-31 | 株式会社村田製作所 | 加速度センサ |
| WO2017007428A1 (en) * | 2015-07-07 | 2017-01-12 | Agency For Science, Technology And Research | Motion measurement devices and methods for measuring motion |
| JP6627501B2 (ja) * | 2015-12-28 | 2020-01-08 | セイコーエプソン株式会社 | 計測装置、減衰特性算出方法、プログラム、および計測システム |
| JP6604200B2 (ja) * | 2015-12-28 | 2019-11-13 | セイコーエプソン株式会社 | 加速度センサー、計測システム、および計測装置 |
| IT201600129935A1 (it) * | 2016-12-22 | 2018-06-22 | Pietro Fiorentini Spa | Struttura di trasduttore, trasduttore comprendente tale struttura di trasduttore, e sensore comprendente detto trasduttore |
| CN109765404B (zh) * | 2018-12-28 | 2020-03-17 | 西安交通大学 | 基于QoS工艺的加速度计芯片及加工工艺和加速度计 |
| CN110095634B (zh) * | 2019-05-24 | 2024-03-29 | 上海工程技术大学 | 一种杠杆式双向声表面波加速度传感器 |
| CN114280329A (zh) * | 2021-12-27 | 2022-04-05 | 西安交通大学 | 一种双端固支音叉石英加速度传感器 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4479385A (en) * | 1982-09-23 | 1984-10-30 | The United States Of America As Represented By The Department Of Energy | Double resonator cantilever accelerometer |
| US4628735A (en) * | 1984-12-14 | 1986-12-16 | Sundstrand Data Control, Inc. | Vibrating beam accelerometer |
| US4970903A (en) * | 1987-10-22 | 1990-11-20 | Hanson Richard A | Force sensing device |
| US4856350A (en) * | 1987-10-22 | 1989-08-15 | Hanson Richard A | Force sensing device and method |
| FR2627592B1 (fr) * | 1988-02-22 | 1990-07-27 | Sagem | Accelerometre pendulaire non asservi a poutre resonante |
| US4881408A (en) * | 1989-02-16 | 1989-11-21 | Sundstrand Data Control, Inc. | Low profile accelerometer |
| US5036715A (en) * | 1989-06-30 | 1991-08-06 | Richard Hanson | Cantilevered force sensing assembly utilizing one or two resonating force sensing devices |
| ES2073903T3 (es) * | 1991-10-31 | 1995-08-16 | K Tron Tech Inc | Disposicion dinamometrica. |
| US5289719A (en) * | 1991-11-13 | 1994-03-01 | New Sd, Inc. | Accelerometer with temperature compensation and matched force transducers |
| EP0693690B1 (en) * | 1994-06-29 | 1999-04-28 | New Sd, Inc. | Accelerometer and method of manufacture |
| JP2000206141A (ja) * | 1999-01-20 | 2000-07-28 | Miyota Kk | 運動量センサ |
| CN1656382A (zh) * | 2001-05-15 | 2005-08-17 | 霍尼韦尔国际公司 | 加速度计应变消除结构 |
| FR2848298B1 (fr) * | 2002-12-10 | 2005-03-11 | Thales Sa | Accelerometre a poutre vibrante |
| US6938334B2 (en) * | 2003-10-31 | 2005-09-06 | Honeywell International, Inc. | Vibrating beam accelerometer two-wafer fabrication process |
| US7802475B2 (en) * | 2006-10-13 | 2010-09-28 | Seiko Epson Corporation | Acceleration sensor |
| JP2008209389A (ja) * | 2006-10-13 | 2008-09-11 | Seiko Epson Corp | 加速度センサ |
| JP2008170203A (ja) * | 2007-01-10 | 2008-07-24 | Epson Toyocom Corp | 加速度検知ユニット、及び加速度センサ |
| JP2009156831A (ja) * | 2007-12-28 | 2009-07-16 | Epson Toyocom Corp | 加速度検知ユニット及び加速度検知装置 |
| US8117917B2 (en) * | 2008-03-27 | 2012-02-21 | Honeywell International Inc. | Vibrating beam accelerometer with improved performance in vibration environments |
| FR2937145B1 (fr) * | 2008-10-10 | 2010-09-24 | Thales Sa | Accelerometre micro-usine |
| JP2011117944A (ja) * | 2009-10-29 | 2011-06-16 | Seiko Epson Corp | 加速度センサー |
| JP2012242343A (ja) * | 2011-05-24 | 2012-12-10 | Seiko Epson Corp | 加速度センサー及び加速度検出装置 |
-
2010
- 2010-01-18 JP JP2010007860A patent/JP5375624B2/ja not_active Expired - Fee Related
-
2011
- 2011-01-06 US US12/985,554 patent/US20110174075A1/en not_active Abandoned
- 2011-01-13 CN CN201110007098XA patent/CN102169128A/zh active Pending
- 2011-01-17 KR KR20110004559A patent/KR20110084843A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| KR20110084843A (ko) | 2011-07-26 |
| JP2011145243A (ja) | 2011-07-28 |
| CN102169128A (zh) | 2011-08-31 |
| US20110174075A1 (en) | 2011-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5375624B2 (ja) | 加速度センサー、及び加速度検出装置 | |
| US8939027B2 (en) | Acceleration sensor | |
| US8297124B2 (en) | Pressure sensor | |
| JP5305028B2 (ja) | 圧力センサー | |
| JP5018227B2 (ja) | 力検知ユニット | |
| US20090255338A1 (en) | Acceleration sensing device | |
| US20110221312A1 (en) | Vibrator element, vibrator, sensor, and electronic apparatus | |
| JP2008286521A (ja) | 回転速度検知ユニット、及び回転速度センサ | |
| JP2004132913A (ja) | 感圧素子、及びこれを用いた圧力センサ | |
| JP2002122614A (ja) | 加速度センサ | |
| JP2011169671A (ja) | 慣性センサー及び慣性センサー装置 | |
| JP2002107373A (ja) | 加速度センサ | |
| JP2010243276A (ja) | 相対圧力センサー、相対圧力測定装置及び相対圧力測定方法 | |
| JP2010181210A (ja) | 加速度センサ | |
| JP2008197030A (ja) | 応力感応素子 | |
| JP2011141152A (ja) | 加速度センサー、及び加速度計 | |
| JP2011153836A (ja) | 加速度センサー、及び加速度計 | |
| JP2008076075A (ja) | 絶対圧センサ | |
| JP2008309731A (ja) | 加速度検知ユニット及び加速度センサ | |
| JP4784436B2 (ja) | 加速度センサ | |
| JP2011149708A (ja) | 力検出ユニット、及び力検出器 | |
| JP2013217719A (ja) | 圧力センサー及び電子機器 | |
| JP5282715B2 (ja) | 力検出ユニット及び力検出装置 | |
| JP5321812B2 (ja) | 物理量センサーおよび物理量測定装置 | |
| JP2012122741A (ja) | 振動片、振動子、センサーおよび電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130116 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130821 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130827 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130909 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5375624 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |