JP5360362B2 - 角速度検出装置用回路、角速度検出装置及び故障判定システム - Google Patents
角速度検出装置用回路、角速度検出装置及び故障判定システム Download PDFInfo
- Publication number
- JP5360362B2 JP5360362B2 JP2008186138A JP2008186138A JP5360362B2 JP 5360362 B2 JP5360362 B2 JP 5360362B2 JP 2008186138 A JP2008186138 A JP 2008186138A JP 2008186138 A JP2008186138 A JP 2008186138A JP 5360362 B2 JP5360362 B2 JP 5360362B2
- Authority
- JP
- Japan
- Prior art keywords
- angular velocity
- signal
- self
- vibration component
- vibration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5642—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using vibrating bars or beams
- G01C19/5649—Signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5719—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces using planar vibrating masses driven in a translation vibration along an axis
Description
駆動信号に基づいて励振振動する振動子に接続され、角速度を検出する角速度検出回路であって、
前記振動子から、コリオリの力に基づく角速度成分と、前記振動子の励振振動に基づく自己振動成分とを含む検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号にオフセット値を加えるオフセット加算手段とを含むことを特徴とする。
また、振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴としてもよい。
前記オフセット値を記憶する記憶手段を含み、
前記オフセット加算手段は、前記直流変換手段の出力信号に、前記記憶手段に記憶された前記オフセット値を加えてもよい。
駆動信号に基づいて励振振動する振動子に接続される角速度を検出する角速度検出回路であって、
前記振動子から、コリオリの力に基づく角速度成分と、前記振動子の励振振動に基づく自己振動成分とを含む検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記自己振動成分抽出手段の出力にオフセット値を加えるオフセット入力手段と、を含むことを特徴としてもよい。
また、振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記自己振動成分抽出手段の出力に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴としてもよい。
前記自己振動成分抽出手段は、被同期信号を反転して反転信号を出力する反転手段と、
前記被同期信号と反転信号とを交互に選択して出力するスイッチと、を有し、
前記オフセット値は、前記被同期信号と反転信号の一方に加算されてもよい。
また、前記自己振動成分抽出手段は、被同期検波信号が一方と他方に分岐されており、一方の被同期検波信号を反転して反転信号を出力する反転手段と、他方の被同期検波信号と前記反転信号とを交互に選択して出力するスイッチと、を有し、前記オフセット値は、前記他方の被同期検波信号と前記反転信号の一方に加算されることを特徴としてもよい。
前記オフセット加算手段又は前記直流変換手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含んでもよい。
前記オフセット加算手段又は前記直流変換手段の出力信号を出力する出力端子を含んでもよい。
また、前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号の増幅率を調整できる可変増幅手段を含むことを特徴としてもよい。
また、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
振動子と、前記振動子に接続され、角速度を検出する角速度検出回路とを有する角速度検出装置であって、
前記振動子は、駆動信号に基づいて励振振動し、回転運動と前記励振振動とによって生じるコリオリの力を得て、前記コリオリの力に基づく角速度成分と、前記励振振動に基づく励振振動成分と、を含む検出信号を出力し、
前記角速度検出回路は、前記検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号にオフセット値を加えるオフセット加算手段と、を含むことを特徴とする。
また、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記直流変換手段の出力信号に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴としてもよい。
また、前記オフセット値を記憶する記憶手段を含み、前記オフセット加算手段は、前記記憶手段に記憶された前記オフセット値を前記直流変換手段の出力信号に加えることを特徴としてもよい。
振動子と、前記振動子に接続され、角速度を検出する角速度検出回路とを有する角速度検出装置であって、
前記振動子は、駆動信号に基づいて励振振動し、回転運動と前記励振振動とによって生じるコリオリの力を得て、前記コリオリの力に基づく角速度成分と、前記励振振動に基づく励振振動成分と、を含む検出信号を出力し、
前記角速度検出回路は、前記検出信号が入力され、前記検出信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記自己振動成分抽出手段の出力にオフセット値を加えるオフセット入力手段と、を含むことを特徴としてもよい。
また、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号を発生させる振動子と、前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、前記自己振動成分抽出手段の出力に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット入力手段と、を含むことを特徴としてもよい。
また、前記自己振動成分抽出手段は、被同期検波信号が一方と他方に分岐されており、一方の被同期検波信号を反転して反転信号を出力する反転手段と、他方の被同期検波信号と前記反転信号とを交互に選択して出力するスイッチと、を有し、前記オフセット値は、前記他方の被同期検波信号と前記反転信号の一方に加算されることを特徴としてもよい。
また、前記オフセット加算手段又は前記直流変換手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含むことを特徴としてもよい。
また、前記オフセット加算手段又は前記直流変換手段の出力信号を出力する出力端子を含むことを特徴としてもよい。
また、前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号の増幅率を調整できる可変増幅手段を含むことを特徴としてもよい。
また、前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段を含むことを特徴としてもよい。
また、前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴としてもよい。
また、本発明に係る故障判定システムは、
前記角速度検出装置の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴としてもよい。
図1は、本実施の形態に係る角速度検出装置の一例を示す回路ブロック図である。
振動子10は、駆動振動端子13、14から入力される駆動信号に基づいて励振振動し、励振振動した状態において、角速度運動が働くと、コリオリの力を得る。そして、振動子10は、コリオリの力に基づく角速度成分と、励振振動に基づく励振振動成分を含む検出信号を出力する。ここで、励振振動成分とコリオリ力に基づく角速度成分とは90°位相がずれている。
検出振動腕の側面の検出電極47と上面の検出電極46の一方を接地端子17に接続し、もう一方を検出端子15、16に接続する。以上のようにして、検出端子15、16へ出力される検出信号は、コリオリの力に基づく角速度成分と、駆動振動の励振振動に基づく漏れ成分(自己振動成分)とが含まれる。
角速度検出回路は、駆動回路20と検出回路30を含む。検出用振動片12には検出端子15及び16と接地端子17が設けられ、検出端子15及び16は検出回路30に接続されている。検出端子15及び16からは、互いに逆位相の検出信号が出力されるように構成されている。
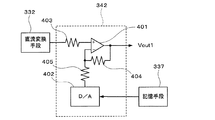
本実施の形態に係る角速度検出回路5は、さらに、オフセット加算手段342の出力信号Vout1に基づいて角速度検出装置1の故障の有無を判定する自己故障判定手段338を含んでもよい。自己故障判定手段338は、オフセット加算手段342の出力信号Vout1が上限基準値を上回った場合や下限基準値を下回った場合に、振動子10に故障があるものと判定し、判定結果に基づく出力信号を出力する。図1に示す回路ブロック図においては、出力端子341を介して角速度検出装置1の外部に出力信号を出力している。角速度検出回路5が自己故障判定手段338を含むことにより、角速度検出装置1自身が振動子10に故障があるか否かを判定することができる。
図6は、本実施の形態に係る故障判定システムの一例を示す回路ブロック図である。
Claims (19)
- 振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴とする角速度検出装置用回路。 - 請求項1において、
前記オフセット値を記憶する記憶手段を含み、
前記オフセット加算手段は、前記直流変換手段の出力信号に、前記記憶手段に記憶された前記オフセット値を加えることを特徴とする角速度検出装置用回路。 - 振動子から、角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記自己振動成分抽出手段の出力に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴とする角速度検出装置用回路。 - 請求項3において、
前記自己振動成分抽出手段は、被同期検波信号が一方と他方に分岐されており、一方の被同期検波信号を反転して反転信号を出力する反転手段と、他方の被同期検波信号と前記反転信号とを交互に選択して出力するスイッチと、を有し、
前記オフセット値は、前記他方の被同期検波信号と前記反転信号の一方に加算されることを特徴とする角速度検出装置用回路。 - 請求項1乃至4のいずれか一項において
前記オフセット加算手段又は前記直流変換手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含むことを特徴とする角速度検出装置用回路。 - 請求項1乃至5のいずれか一項において、
前記オフセット加算手段又は前記直流変換手段の出力信号を出力する出力端子を含むことを特徴とする角速度検出装置用回路。 - 請求項1乃至6のいずれか一項において、
前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号の増幅率を調整できる可変増幅手段を含むことを特徴とする角速度検出装置用回路。 - 請求項1乃至7のいずれか一項において、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段を含むことを特徴とする角速度検出装置用回路。 - 請求項1乃至8のいずれか一項において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置用回路。 - 角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号を発生させる振動子と、
前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記直流変換手段の出力信号に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴とする角速度検出装置。 - 請求項10において、
前記オフセット値を記憶する記憶手段を含み、
前記オフセット加算手段は、前記記憶手段に記憶された前記オフセット値を前記直流変換手段の出力信号に加えることを特徴とする角速度検出装置。 - 角速度の大きさに応じた角速度成分と、励振振動に基づく自己振動成分と、を含む信号を発生させる振動子と、
前記信号が入力され、前記信号から前記自己振動成分を抽出する自己振動成分抽出手段と、
前記自己振動成分抽出手段の出力信号を積分する積分手段を含む直流変換手段と、
前記自己振動成分抽出手段の出力に、前記振動子が有する自己振動成分の大きさに応じたオフセット値を加えるオフセット加算手段と、を含むことを特徴とする角速度検出装置。 - 請求項12において、
前記自己振動成分抽出手段は、被同期検波信号が一方と他方に分岐されており、一方の被同期検波信号を反転して反転信号を出力する反転手段と、他方の被同期検波信号と前記反転信号とを交互に選択して出力するスイッチと、を有し、
前記オフセット値は、前記他方の被同期検波信号と前記反転信号の一方に加算されることを特徴とする角速度検出装置。 - 請求項10乃至13のいずれか一項において
前記オフセット加算手段又は前記直流変換手段の出力信号に基づいて角速度検出装置の故障の有無を判定する自己故障判定手段を含むことを特徴とする角速度検出装置。 - 請求項10乃至14のいずれか一項において、
前記オフセット加算手段又は前記直流変換手段の出力信号を出力する出力端子を含むことを特徴とする角速度検出装置。 - 請求項10乃至15のいずれか一項において、
前記直流変換手段は、前記積分手段の前段と後段の少なくとも一方に信号の増幅率を調整できる可変増幅手段を含むことを特徴とする角速度検出装置。 - 請求項10乃至16のいずれか一項において、
前記直流変換手段の出力信号の温度による変動を補正する温度特性補正手段を含むことを特徴とする角速度検出装置。 - 請求項10乃至17のいずれか一項において、
前記振動子は、検出用基部から延出している連結腕と、前記連結腕に配置された駆動用基部から前記連結腕の延出方向と交差する方向に延出している駆動振動片と、前記検出用基部から前記連結腕の延出方向と交差する方向に延出している検出振動片と、を含むことを特徴とする角速度検出装置。 - 請求項10乃至18のいずれか一項に記載の角速度検出装置と、
前記角速度検出装置の出力信号が入力され、前記角速度検出装置の故障の有無を判定する外部故障判定手段と、を含むことを特徴とする故障判定システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186138A JP5360362B2 (ja) | 2008-07-17 | 2008-07-17 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
| US12/504,123 US8327703B2 (en) | 2008-07-17 | 2009-07-16 | Angular velocity detection circuit and angular velocity detection apparatus |
| US13/676,679 US8671755B2 (en) | 2008-07-17 | 2012-11-14 | Angular velocity detection circuit and angular velocity detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008186138A JP5360362B2 (ja) | 2008-07-17 | 2008-07-17 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012269293A Division JP5622000B2 (ja) | 2012-12-10 | 2012-12-10 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010025696A JP2010025696A (ja) | 2010-02-04 |
| JP2010025696A5 JP2010025696A5 (ja) | 2011-08-18 |
| JP5360362B2 true JP5360362B2 (ja) | 2013-12-04 |
Family
ID=41529081
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008186138A Active JP5360362B2 (ja) | 2008-07-17 | 2008-07-17 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US8327703B2 (ja) |
| JP (1) | JP5360362B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5360362B2 (ja) * | 2008-07-17 | 2013-12-04 | セイコーエプソン株式会社 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
| JP5360361B2 (ja) * | 2008-07-17 | 2013-12-04 | セイコーエプソン株式会社 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
| JP5552976B2 (ja) | 2010-09-07 | 2014-07-16 | セイコーエプソン株式会社 | 角速度検出装置及び電子機器 |
| JP5638900B2 (ja) * | 2010-09-28 | 2014-12-10 | 株式会社東海理化電機製作所 | 磁気センサデバイス |
| JP6009142B2 (ja) * | 2010-12-02 | 2016-10-19 | ソニーセミコンダクタソリューションズ株式会社 | 振動型ジャイロセンサ及び振動型ジャイロ用回路 |
| JP6197323B2 (ja) * | 2013-03-22 | 2017-09-20 | セイコーエプソン株式会社 | 検出装置、センサー、ジャイロセンサー、電子機器及び移動体 |
| JP6671151B2 (ja) * | 2015-11-09 | 2020-03-25 | セイコーエプソン株式会社 | 物理量検出回路、電子機器および移動体 |
| JP2022182708A (ja) | 2021-05-28 | 2022-12-08 | 株式会社デンソー | 慣性検出装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3036145B2 (ja) * | 1991-08-12 | 2000-04-24 | 株式会社村田製作所 | 振動ジャイロ |
| JPH06160100A (ja) | 1992-11-19 | 1994-06-07 | Fujitsu Ten Ltd | 振動ジャイロの信号処理回路 |
| JPH0791957A (ja) | 1993-09-22 | 1995-04-07 | Fujitsu Ten Ltd | 圧電振動ジャイロ |
| JPH07113645A (ja) * | 1993-10-15 | 1995-05-02 | Toyota Motor Corp | 振動ジャイロ |
| JP3326989B2 (ja) * | 1994-08-25 | 2002-09-24 | 株式会社豊田中央研究所 | 振動子とその調整方法および角速度センサ |
| US6705151B2 (en) * | 1995-05-30 | 2004-03-16 | Matsushita Electric Industrial Co., Ltd. | Angular velocity sensor |
| JPH09159459A (ja) | 1995-12-04 | 1997-06-20 | Murata Mfg Co Ltd | 振動ジャイロ |
| JP2000171257A (ja) * | 1998-12-04 | 2000-06-23 | Toyota Motor Corp | 角速度検出装置 |
| JP3674467B2 (ja) * | 2000-06-27 | 2005-07-20 | 株式会社村田製作所 | 振動ジャイロ及びそれを用いた電子装置 |
| US6510737B1 (en) * | 2000-09-15 | 2003-01-28 | Bei Technologies, Inc. | Inertial rate sensor and method with improved tuning fork drive |
| US6497146B1 (en) * | 2000-09-15 | 2002-12-24 | Bei Technologies, Inc. | Inertial rate sensor and method with built-in testing |
| JP4924858B2 (ja) * | 2001-07-06 | 2012-04-25 | セイコーエプソン株式会社 | 角速度測定装置 |
| JP4068370B2 (ja) * | 2001-09-07 | 2008-03-26 | シチズンホールディングス株式会社 | 振動ジャイロ |
| JP3956877B2 (ja) * | 2003-03-18 | 2007-08-08 | 株式会社デンソー | センサ用温度補正装置およびセンサの温度補正方法 |
| US20060241666A1 (en) | 2003-06-11 | 2006-10-26 | Briggs Barry D | Method and apparatus for body fluid sampling and analyte sensing |
| US7370531B2 (en) * | 2004-01-20 | 2008-05-13 | Ngk Insulators, Ltd. | Detection circuits, detection method and systems of measuring physical quantities |
| JP2005214878A (ja) * | 2004-01-30 | 2005-08-11 | Sony Corp | 角速度センサ |
| JP3964875B2 (ja) * | 2004-02-16 | 2007-08-22 | 株式会社ジャイトロニクス | 角速度センサ |
| JP2007255890A (ja) | 2004-04-20 | 2007-10-04 | Murata Mfg Co Ltd | ジャイロ装置 |
| US7237169B2 (en) * | 2004-07-26 | 2007-06-26 | Bei Technologies, Inc. | Cross-monitoring sensor system and method |
| JP2006119008A (ja) * | 2004-10-22 | 2006-05-11 | Seiko Epson Corp | ジャイロセンサの温度特性調整方法及びジャイロセンサ |
| JP4534741B2 (ja) * | 2004-12-10 | 2010-09-01 | 株式会社デンソー | ジャイロセンサ |
| JP4669491B2 (ja) * | 2006-03-28 | 2011-04-13 | 日本航空電子工業株式会社 | 音叉型振動ジャイロ |
| JP2007327944A (ja) * | 2006-05-09 | 2007-12-20 | Seiko Epson Corp | 検出装置、ジャイロセンサ及び電子機器 |
| JP2008209182A (ja) | 2007-02-26 | 2008-09-11 | Seiko Epson Corp | 検出装置、センサ及び電子機器 |
| JP5360361B2 (ja) * | 2008-07-17 | 2013-12-04 | セイコーエプソン株式会社 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
| JP5360362B2 (ja) | 2008-07-17 | 2013-12-04 | セイコーエプソン株式会社 | 角速度検出装置用回路、角速度検出装置及び故障判定システム |
-
2008
- 2008-07-17 JP JP2008186138A patent/JP5360362B2/ja active Active
-
2009
- 2009-07-16 US US12/504,123 patent/US8327703B2/en not_active Expired - Fee Related
-
2012
- 2012-11-14 US US13/676,679 patent/US8671755B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8671755B2 (en) | 2014-03-18 |
| JP2010025696A (ja) | 2010-02-04 |
| US20100011858A1 (en) | 2010-01-21 |
| US20130069621A1 (en) | 2013-03-21 |
| US8327703B2 (en) | 2012-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5360361B2 (ja) | 角速度検出装置用回路、角速度検出装置及び故障判定システム | |
| JP5360362B2 (ja) | 角速度検出装置用回路、角速度検出装置及び故障判定システム | |
| JP5552976B2 (ja) | 角速度検出装置及び電子機器 | |
| JP4610012B2 (ja) | 物理量測定装置 | |
| WO2005103618A1 (ja) | ジャイロ装置 | |
| JP2000171257A (ja) | 角速度検出装置 | |
| US20150153174A1 (en) | Apparatus for driving gyro sensor and control method thereof | |
| JPH06160100A (ja) | 振動ジャイロの信号処理回路 | |
| JP2008170294A (ja) | 角速度センサ | |
| JP2014197010A (ja) | 角速度検出装置及び電子機器 | |
| JP5622000B2 (ja) | 角速度検出装置用回路、角速度検出装置及び故障判定システム | |
| JP5365770B2 (ja) | 角速度検出装置用回路、角速度検出装置及び角速度検出装置の故障診断方法 | |
| JP5360676B2 (ja) | 角速度検出装置の製造方法 | |
| JP5622001B2 (ja) | 角速度検出装置用回路、角度検出装置及び故障判定システム | |
| JP5041122B2 (ja) | 振動ジャイロセンサ | |
| JP2006119008A (ja) | ジャイロセンサの温度特性調整方法及びジャイロセンサ | |
| JP2006010408A (ja) | 振動ジャイロ | |
| JP5700090B2 (ja) | 角速度検出装置の製造方法 | |
| JP2006250643A (ja) | 角速度センサの異常検出装置 | |
| JP2015118102A (ja) | 角速度検出装置の製造方法 | |
| JP2008216050A (ja) | センサドリフト補正装置及び補正方法 | |
| JP2010223705A (ja) | 物理量検出装置及び物理量検出システム | |
| JP2008261685A (ja) | 角速度センサ | |
| JP2009222691A (ja) | 角速度データ処理装置および角速度データ処理方法 | |
| JP2010060302A (ja) | 物理量検出方法、検出装置、および電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110701 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110701 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20110729 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110729 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110819 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121010 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130807 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130820 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5360362 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |