JP5347705B2 - ロボット制御装置 - Google Patents
ロボット制御装置 Download PDFInfo
- Publication number
- JP5347705B2 JP5347705B2 JP2009117543A JP2009117543A JP5347705B2 JP 5347705 B2 JP5347705 B2 JP 5347705B2 JP 2009117543 A JP2009117543 A JP 2009117543A JP 2009117543 A JP2009117543 A JP 2009117543A JP 5347705 B2 JP5347705 B2 JP 5347705B2
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- rotation axis
- robot
- switching
- operator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 description 23
- 238000012545 processing Methods 0.000 description 8
- 238000013459 approach Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 235000019219 chocolate Nutrition 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images










Landscapes
- Manipulator (AREA)
Description
ワークをツールでグリップするロボットを操作子の操作によって駆動させる制御を行う装置であって、
前記ワークを回転させるための前記操作子の操作時に、所定の回転軸を回転中心として前記ワークが回転するように前記ロボットを駆動させる回転駆動信号を生成する信号生成手段と、
前記所定の回転軸の位置を切り換える切換指示が入力される切換指示手段と、
前記切換指示手段に前記切換指示が入力される度に、前記信号生成手段が前記回転駆動信号の生成時に前記所定の回転軸とする回転軸を、それまでの回転軸とは位置が異なる別の回転軸に切り換える回転軸切換手段と、
を備えることを特徴とする。
3 コントローラ
4 ロボット装置
4a ロータリアクチュエータ
4b ロータリアクチュエータ
4c ロータリアクチュエータ
4d ロータリアクチュエータ
4e ロータリアクチュエータ
4f ロータリアクチュエータ
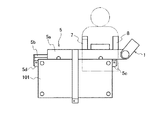
5 ツール
5a メインフレーム
5b スライドフレーム
5c グリッパ
5d グリッパ
6 操作装置
7 固定レバー
8 操作レバー(操作子)
8a 力覚センサ
9 表示灯
10 イネーブルスイッチ
11 回転軸切換スイッチ
20 収納空間
21 壁部
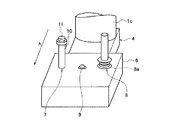
101 ワーク
101a 取付孔
101b 取付孔
101c 取付孔
101d 取付孔
201 ボード
201a 取付ピン
201b 取付ピン
201c 取付ピン
201d 取付ピン
θ1 第1の回転軸
θ2 第2の回転軸
Claims (4)
- ワークをツールでグリップするロボットを操作子の操作によって駆動させる制御を行う装置であって、
前記ワークを回転させるための前記操作子の操作時に、所定の回転軸を回転中心として前記ワークが回転するように前記ロボットを駆動させる回転駆動信号を生成する信号生成手段と、
前記所定の回転軸の位置を切り換える切換指示が入力される切換指示手段と、
前記切換指示手段に前記切換指示が入力される度に、前記信号生成手段が前記回転駆動信号の生成時に前記所定の回転軸とする回転軸を、それまでの回転軸とは位置が異なる別の回転軸に切り換える回転軸切換手段と、
を備えることを特徴とするロボット制御装置。 - 前記所定の回転軸の切り換えの指示操作が行われる指示操作手段をさらに備えており、該指示操作手段により前記指示操作が行われることで前記切換指示手段に前記切換指示が入力されることを特徴とする請求項1記載のロボット制御装置。
- 前記回転軸切換手段は、前記所定の回転軸とする回転軸の切り換えを前記ロボットの停止中に行うことを特徴とする請求項1又は2記載のロボット制御装置。
- 前記ロボットが前記ワークの移動をアシストするパワーアシスト装置であることを特徴とする請求項1、2又は3記載のロボット制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009117543A JP5347705B2 (ja) | 2009-05-14 | 2009-05-14 | ロボット制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009117543A JP5347705B2 (ja) | 2009-05-14 | 2009-05-14 | ロボット制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010264538A JP2010264538A (ja) | 2010-11-25 |
| JP5347705B2 true JP5347705B2 (ja) | 2013-11-20 |
Family
ID=43361994
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009117543A Active JP5347705B2 (ja) | 2009-05-14 | 2009-05-14 | ロボット制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5347705B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6527655B2 (ja) * | 2013-03-25 | 2019-06-05 | 株式会社デンソーウェーブ | アームの操作方法及び操作装置 |
| JP6527654B2 (ja) * | 2013-03-25 | 2019-06-05 | 株式会社デンソーウェーブ | アームの操作方法及び操作装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000176872A (ja) * | 1998-12-15 | 2000-06-27 | Toyota Motor Corp | マニピュレータ |
| JP3406259B2 (ja) * | 1999-11-11 | 2003-05-12 | 三重県 | ジョイスティック型コントローラ |
| JP4517726B2 (ja) * | 2004-05-25 | 2010-08-04 | 株式会社安川電機 | アシスト装置 |
| JP2008213119A (ja) * | 2007-03-07 | 2008-09-18 | Institute Of Physical & Chemical Research | 協調作業ロボットとその制御方法 |
| JP5572994B2 (ja) * | 2009-05-14 | 2014-08-20 | 株式会社Ihi | ロボット制御装置 |
-
2009
- 2009-05-14 JP JP2009117543A patent/JP5347705B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010264538A (ja) | 2010-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5830755B2 (ja) | ロボットシステム | |
| JP7055657B2 (ja) | 接続装置及び接続方法 | |
| JP5369638B2 (ja) | ロボット装置 | |
| JP2010269419A (ja) | ロボット制御装置およびその制御方法 | |
| CN113290542B (zh) | 机器人装置及控制方法 | |
| JP7020812B2 (ja) | ロボット装置、ロボット装置の制御方法、ロボット装置を用いた物品の組立方法、制御プログラムおよび記録媒体 | |
| JP2019010723A (ja) | ロボットハンド、ロボット装置、ロボットハンドの制御方法 | |
| JP2009034754A (ja) | パワーアシスト装置およびその制御方法 | |
| JP2020004916A (ja) | 基板搬送装置及びその運転方法 | |
| JP5572994B2 (ja) | ロボット制御装置 | |
| JP2019104099A (ja) | ロボットハンド、ロボットハンドの制御方法 | |
| JP5347705B2 (ja) | ロボット制御装置 | |
| CN100537155C (zh) | 工业用机器人的原点调整方法 | |
| JP6630050B2 (ja) | ロボット、ロボットの制御方法、ワークの取付方法及びワークの搬送方法 | |
| JP2016172296A (ja) | ロボット装置、ロボット制御プログラム、および記録媒体 | |
| CN115916484A (zh) | 机器人系统及机器人系统的运转方法 | |
| JP5446574B2 (ja) | ロボットの操作方法及びロボット操作用デバイス | |
| WO2018043493A1 (ja) | ロボット及びその運転方法 | |
| JP2015085499A (ja) | ロボット、ロボットシステム、制御装置及び制御方法 | |
| JP4791168B2 (ja) | 位置決めロボット | |
| JP5412950B2 (ja) | ロボット制御装置 | |
| CN109789558A (zh) | 工件搬运用末端执行器以及工件搬运装置 | |
| TWI790027B (zh) | 機器人以及教示方法 | |
| JP7458338B2 (ja) | ロボットハンド | |
| JP5365156B2 (ja) | ロボット装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130312 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130314 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130805 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5347705 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |