JP5230994B2 - 駆動装置および撮像装置 - Google Patents
駆動装置および撮像装置 Download PDFInfo
- Publication number
- JP5230994B2 JP5230994B2 JP2007291313A JP2007291313A JP5230994B2 JP 5230994 B2 JP5230994 B2 JP 5230994B2 JP 2007291313 A JP2007291313 A JP 2007291313A JP 2007291313 A JP2007291313 A JP 2007291313A JP 5230994 B2 JP5230994 B2 JP 5230994B2
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- vibrator
- moving
- body portion
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
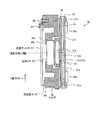
38 ホルダ
50 Bucom
301 X枠
302 フレーム
304x,304y 軸受け
307x,307y ボール
320x X軸振動子
320y Y軸振動子
321x,322x 駆動子
321y,322y 駆動子
330x,330y 摺動体
331x,331y 軸受け
332x,332y 摺動板
336x,336y ボール
340x,340y 押圧機構
342x,342y 保持部
Claims (7)
- 所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する振動子と、
前記振動子を保持する保持部を有する固定部材と、
前記振動子の楕円振動により駆動されて前記固定部材に対して移動する移動体と、
を備え、
前記移動体は、
所望の大きさに形成された第1の移動体部と、
前記駆動部が押圧されて接触する摺動部と、該摺動部と相反する側に設けられて前記固定部材が有するガイド部に係合して移動方向がガイドされる被ガイド部とを有し、前記第1の移動体部より剛性が高く、かつ、前記第1の移動体部より小さく形成されて該第1の移動体部に固定された第2の移動体部とからなり、
前記ガイド部と前記被ガイド部は、移動方向に沿って1列に配列された転動体を有し、
前記ガイド部から移動方向とは異なる方向の離れた位置で前記第1の移動体部と前記固定部材との間に付勢力による挟持状態で配設された位置決め用の1つの転動体を備えることを特徴とする駆動装置。 - 前記第2の移動体部と一体で移動する前記第1の移動体部は、前記固定部材の前記ガイド部と前記第2の移動体部の被ガイド部との係合により移動方向がガイドされることを特徴とする請求項1に記載の駆動装置。
- 前記第1の移動体部は、樹脂材料、アルミニウムまたはマグネシウムにより形成されていることを特徴とする請求項1または2に記載の駆動装置。
- 前記第2の移動体部および前記振動子を挟んで前記ガイド部と相反する側から前記駆動部を前記摺動部に押圧するように前記振動子を付勢する付勢手段を備えることを特徴とする請求項1〜3のいずれか一つに記載の駆動装置。
- 所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第1の振動子と、
前記第1の振動子を保持する第1の保持部を有する固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して第1の方向に移動する第1の移動体と、
第2の保持部を有する前記第1の移動体に保持されて、所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第2の振動子と、
前記第2の振動子の前記駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第1の方向と異なる第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する第2の移動体と、
を備え、
前記第1,第2の移動体のうち、少なくとも一方の移動体は、
所望の大きさに形成された第1の移動体部と、
前記駆動部が接触する摺動部と、該摺動部と相反する側に設けられて前記ガイド部に係合して移動方向がガイドされる被ガイド部とを有し、前記第1の移動体部より剛性が高く、かつ、前記第1の移動体部より小さく形成されて該第1の移動体部に固定された第2の移動体部とからなることを特徴とする駆動装置。 - 当該撮像装置全体の動作を制御するマイクロコンピュータを備え、撮影光軸に直交する平面内で直交する第1の方向および第2の方向に撮像素子のブレを補償するように変位移動させる撮像装置において、
前記マイクロコンピュータの指示に基づき所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第1の振動子と、
前記第1の振動子を保持する第1の保持部を有して、撮像装置本体に固着された固定部材と、
前記第1の振動子の前記駆動部が押圧され、かつ、前記固定部材が有するガイド部により第1の方向に移動方向が規制され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して第1の方向に移動する第1の移動体と、
第2の保持部を有する前記第1の移動体に保持されて、前記マイクロコンピュータの指示に基づき所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第2の振動子と、
前記第2の振動子の前記駆動部が押圧され、かつ、前記第1の移動体が有するガイド部により第2の方向に移動方向が規制され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体に対して第2の方向に移動する、前記撮像素子を撮影光軸上に保持した第2の移動体と、
を備え、
前記第1,第2の移動体のうち、少なくとも一方の移動体は、
所望の大きさに形成された第1の移動体部と、
前記駆動部が接触する摺動部と、該摺動部と相反する側に設けられて前記ガイド部に係合して移動方向がガイドされる被ガイド部とを有し、前記第1の移動体部より剛性が高く、かつ、前記第1の移動体部より小さく形成されて該第1の移動体部に固定された第2の移動体部とからなることを特徴とする撮像装置。 - 当該撮像装置全体の動作を制御するマイクロコンピュータを備え、撮影光軸に直交する平面内で直交する第1の方向および第2の方向に撮像素子のブレを補償するように変位移動させる撮像装置において、
前記マイクロコンピュータの指示に基づき所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第1の振動子と、
撮影光軸周りの開口を囲む枠形状に形成されるとともに前記第1の振動子を保持する第1の保持部を有して、撮像装置本体に固着された固定部材と、
撮影光軸周りの開口を囲む枠形状で所望の大きさに形成された第1の移動体部と、
前記第1の振動子の前記駆動部が押圧されて接触する摺動部と、該摺動部と相反する側に設けられて前記固定部材が有するガイド部に係合して第1の方向に移動方向がガイドされる被ガイド部とを有し、前記第1の移動体部より剛性が高く、かつ、前記第1の移動体部より小さく形成されて該第1の移動体部に固定され、前記第1の振動子の楕円振動により駆動されて前記固定部材に対して第1の方向に移動する第2の移動体部と、
第2の保持部を有する前記第1の移動体部に保持されて、前記マイクロコンピュータの指示に基づき所定の周波電圧が印加されることにより楕円振動を生ずる駆動部を有する第2の振動子と、
撮影光軸上に前記撮像素子を保持して前記第1の移動体部の前記開口に配設される所望の大きさに形成された第3の移動体部と、
前記第2の振動子の前記駆動部が押圧されて接触する摺動部と、該摺動部と相反する側に設けられて前記第1の移動体部が有するガイド部に係合して第2の方向に移動方向がガイドされる被ガイド部とを有し、前記第3の移動体部より剛性が高く、かつ、前記第3の移動体部より小さく形成されて該第3の移動体部に固定され、前記第2の振動子の楕円振動により駆動されて前記第1の移動体部に対して第2の方向に移動する第4の移動体部と、
を備えることを特徴とする撮像装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007291313A JP5230994B2 (ja) | 2006-12-15 | 2007-11-08 | 駆動装置および撮像装置 |
| US11/999,643 US7893598B2 (en) | 2006-12-15 | 2007-12-05 | Driving apparatus and image pickup apparatus |
| CN2007101957689A CN101207343B (zh) | 2006-12-15 | 2007-12-14 | 驱动装置及摄像装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006338715 | 2006-12-15 | ||
| JP2006338715 | 2006-12-15 | ||
| JP2007291313A JP5230994B2 (ja) | 2006-12-15 | 2007-11-08 | 駆動装置および撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008172995A JP2008172995A (ja) | 2008-07-24 |
| JP2008172995A5 JP2008172995A5 (ja) | 2010-12-24 |
| JP5230994B2 true JP5230994B2 (ja) | 2013-07-10 |
Family
ID=39567291
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007291313A Active JP5230994B2 (ja) | 2006-12-15 | 2007-11-08 | 駆動装置および撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5230994B2 (ja) |
| CN (1) | CN101207343B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11165368B2 (en) | 2018-02-08 | 2021-11-02 | Canon Kabushiki Kaisha | Vibration wave motor and lens drive apparatus including the vibration wave motor |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7941045B2 (en) * | 2008-10-30 | 2011-05-10 | Panasonic Corporation | Camera body, interchangeable lens unit, and imaging apparatus |
| JP5053985B2 (ja) | 2008-12-24 | 2012-10-24 | オリンパスイメージング株式会社 | 駆動装置及びこの駆動装置を用いた撮像装置 |
| JP5810303B2 (ja) | 2010-04-06 | 2015-11-11 | パナソニックIpマネジメント株式会社 | 駆動装置 |
| JP5909624B2 (ja) | 2010-08-04 | 2016-04-27 | パナソニックIpマネジメント株式会社 | 駆動装置 |
| JP6214193B2 (ja) | 2012-06-05 | 2017-10-18 | キヤノン株式会社 | 振動波駆動装置、二次元駆動装置、画像振れ補正装置、交換レンズ、撮像装置、及び自動ステージ |
| JP6053535B2 (ja) | 2013-01-25 | 2016-12-27 | キヤノン株式会社 | 補正光学装置、画像振れ補正装置、及び撮像装置 |
| JP6188366B2 (ja) * | 2013-03-21 | 2017-08-30 | キヤノン株式会社 | アクチュエータ及び光学機器 |
| KR102631961B1 (ko) * | 2015-11-02 | 2024-01-31 | 엘지이노텍 주식회사 | 렌즈 구동 장치 및 이를 포함하는 카메라 모듈 |
| TWI650587B (zh) * | 2016-08-04 | 2019-02-11 | 台灣東電化股份有限公司 | 鏡頭驅動裝置 |
| CN108072957B (zh) * | 2016-11-14 | 2022-05-24 | 台湾东电化股份有限公司 | 光学驱动机构 |
| JP6910936B2 (ja) * | 2017-11-27 | 2021-07-28 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
| JP6995660B2 (ja) | 2018-02-15 | 2022-01-14 | キヤノン株式会社 | 振動波モータを備えた駆動装置 |
| JP7034770B2 (ja) * | 2018-03-02 | 2022-03-14 | キヤノン株式会社 | 振動波モータ及びレンズ装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1011090B (zh) * | 1985-04-01 | 1991-01-02 | 株式会社岛津制作所 | X射线多轨道断层摄影装置 |
| JP2001141977A (ja) * | 1999-11-15 | 2001-05-25 | Sony Corp | レンズの駆動装置及びレンズの駆動装置を有する電子機器 |
| JP3842093B2 (ja) * | 2001-10-01 | 2006-11-08 | コニカミノルタフォトイメージング株式会社 | 撮像装置 |
| JP2006330077A (ja) * | 2005-05-23 | 2006-12-07 | Canon Inc | 光学機器 |
-
2007
- 2007-11-08 JP JP2007291313A patent/JP5230994B2/ja active Active
- 2007-12-14 CN CN2007101957689A patent/CN101207343B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11165368B2 (en) | 2018-02-08 | 2021-11-02 | Canon Kabushiki Kaisha | Vibration wave motor and lens drive apparatus including the vibration wave motor |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101207343B (zh) | 2012-05-09 |
| JP2008172995A (ja) | 2008-07-24 |
| CN101207343A (zh) | 2008-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5230994B2 (ja) | 駆動装置および撮像装置 | |
| JP4981547B2 (ja) | 駆動装置および撮像装置 | |
| JP4981484B2 (ja) | 駆動装置 | |
| JP5185684B2 (ja) | 駆動装置および撮像装置 | |
| JP5284605B2 (ja) | 駆動装置及びぶれ補正装置 | |
| US7893598B2 (en) | Driving apparatus and image pickup apparatus | |
| JP2009011097A (ja) | 駆動装置 | |
| JP5053985B2 (ja) | 駆動装置及びこの駆動装置を用いた撮像装置 | |
| JP2009008929A (ja) | ブレ補正可能な撮像装置 | |
| JP2009008944A (ja) | ぶれ補正装置 | |
| JP2008216570A (ja) | 撮像装置 | |
| JP5165289B2 (ja) | 駆動装置 | |
| JP2009008858A (ja) | ブレ補正装置及び撮像装置 | |
| JP2008220030A (ja) | 駆動装置および撮像装置 | |
| JP2009265416A (ja) | 駆動装置および撮像装置 | |
| JP2009165086A (ja) | 撮像装置 | |
| JP2010048977A (ja) | 撮像素子駆動装置 | |
| JP5132410B2 (ja) | 駆動装置および撮像装置 | |
| JP2006330077A (ja) | 光学機器 | |
| JP2009294613A (ja) | 撮像素子駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120613 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120619 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130321 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |