JP5215517B2 - 塗料、又はワニスの生産用プラントで使用する容器を輸送するためのシステム - Google Patents
塗料、又はワニスの生産用プラントで使用する容器を輸送するためのシステム Download PDFInfo
- Publication number
- JP5215517B2 JP5215517B2 JP2001559780A JP2001559780A JP5215517B2 JP 5215517 B2 JP5215517 B2 JP 5215517B2 JP 2001559780 A JP2001559780 A JP 2001559780A JP 2001559780 A JP2001559780 A JP 2001559780A JP 5215517 B2 JP5215517 B2 JP 5215517B2
- Authority
- JP
- Japan
- Prior art keywords
- longitudinally extending
- fixed
- bearing surfaces
- bearing surface
- movable longitudinally
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000004519 manufacturing process Methods 0.000 title claims abstract description 17
- 239000003973 paint Substances 0.000 title claims abstract description 11
- 239000002966 varnish Substances 0.000 title claims abstract description 10
- 230000001174 ascending effect Effects 0.000 claims 2
- 230000008901 benefit Effects 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 6
- 239000000975 dye Substances 0.000 description 4
- 239000000047 product Substances 0.000 description 4
- 230000004913 activation Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000009849 deactivation Effects 0.000 description 1
- 210000003298 dental enamel Anatomy 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- -1 enamels Substances 0.000 description 1
- 239000000976 ink Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G25/00—Conveyors comprising a cyclically-moving, e.g. reciprocating, carrier or impeller which is disengaged from the load during the return part of its movement
- B65G25/02—Conveyors comprising a cyclically-moving, e.g. reciprocating, carrier or impeller which is disengaged from the load during the return part of its movement the carrier or impeller having different forward and return paths of movement, e.g. walking beam conveyors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Specific Conveyance Elements (AREA)
- Paints Or Removers (AREA)
- Spray Control Apparatus (AREA)
- Warehouses Or Storage Devices (AREA)
- Packging For Living Organisms, Food Or Medicinal Products That Are Sensitive To Environmental Conditiond (AREA)
- Reciprocating Conveyors (AREA)
- Coating Apparatus (AREA)
- Agricultural Chemicals And Associated Chemicals (AREA)
- Packages (AREA)
- Details Of Rigid Or Semi-Rigid Containers (AREA)
- Control Of Conveyors (AREA)
- Mechanical Means For Catching Fish (AREA)
- Handcart (AREA)
Description
輸送システムのもう1つの例は、米国特許第4151907号公報(US 4.151.907)に開示されているが、これは、長手方向に延びるビーム(26)を駆動するカム(32)をその端部の一方のみに有するウォーキング・ビーム・コンベヤを示したものである。第1および第2のリンク手段(48、54)はビームをコンベヤの横方向たとえば垂直方向と、コンベヤの長手方向たとえば水平方向に移動させる。
Claims (2)
- 塗料、又はワニスの生産用プラントで使用する容器を輸送するためのシステムにおいて、
− 前記容器を直接支持する少なくとも2つの平行な固定支承面(23、25)を規定する主要固定フレーム構造(16)と、
− 前記容器の底面に選択的に係合する少なくとも2つの可動の長手方向に延びる支承面(39、41)を規定する、可動の長手方向に延びる支承構造(26、36、38、40)と、
− 使用時に前記主要固定フレーム構造(16)に対する長手方向および垂直方向の両方の運動によって前記固定支承面(23、25)に平行な輸送経路に沿って個々の容器を輸送するために、前記可動の長手方向に延びる支承構造(26、36、38、40)に動作可能に接続された取扱い手段とを含み、
該取扱い手段が、前記主要固定フレーム構造(16)の前記固定支承面(23、25)から外れて、又は該固定支承面(23、25)に接触して容器を選択的に上昇、又は下降するために、前記固定支承面(23、25)に対する前記可動の長手方向に延びる支承面(39、41)の上昇、又は下降運動を生じる、上昇手段(28)と、前記固定支承面(23、25)に対する前記可動の長手方向に延びる支承面(39、41)の長手方向の前進、及び後退運動を生じる操作手段(32、34)とを含むシステムであって、
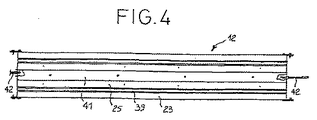
− 前記主要固定フレーム構造(16)は、前記輸送経路の前記長手方向の中心線を通る垂直面に対して対称に配置される、2つの平行な固定側部支承面(23)と、前記固定側部支承面(23)に平行な2つの固定内部支承面(25)とを含み、
− 前記可動の長手方向に延びる支承面(39、41)は、前記固定側部支承面(23)の1つと、前記固定内部支承面(25)の1つとの間に横方向の遊びを設けて、それぞれ配置される、2つの中間支承面(39)を含み、
− 前記可動の長手方向に延びる支承面(39、41)は、前記長手方向の中心線に沿って配置され、前記2つの固定内部支承面(25)間に遊びを設けて配置される中央支承面(41)も含み、
− 前記可動の長手方向に延びる支承構造(26、36、38、40)が、前記上昇手段(28)の介在により前記主要固定フレーム構造(16)に取り付けられ、前記上昇手段(28)に対して長手方向にスライド可能になるように取り付けられた細長いビーム構造(26)を含み、
− 前記上昇手段(28)によって引き起こされ、前記細長いビーム構造(26)を上昇および下降させる連続的な交互運動と、前記操作手段(32、34)によって引き起こされる前記細長いビーム構造(26)の連続的な長手方向交互運動とを同期させるための手段を設け、その結果、前記長手方向の中心線に平行な垂直面内の円形または楕円形の運動が発生し、前記垂直面では前記細長いビーム構造(26)の水平速度成分が前部および後部の死点でゼロになり、前記死点は前記固定支承面(23、25)および前記可動の長手方向に延びる支承面(39、41)のすべてが前記容器の底面に共通の水平面で位置合せされる瞬間と一致する、
ことを特徴とするシステム。
- 連続して長手方向に並んで配置され、それぞれが前記可動の長手方向に延びる支承構造(26、36、38、40)と前記取扱い手段とを含む複数のモジュール部(10、12、14)であって、
前記モジュール部の少なくとも1つは、
− 前記取扱い手段に結合された動力手段(32)を含む電動モジュール部(10)、又は
− 前記可動の長手方向に延びる支承構造(26、36,38,40)上に配置された容器の選択的回転のための装置(44)を含む、回転用のモジュール部(14)、
を含むことを特徴とする、請求項1に記載の輸送システム。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITBO00A000064 | 2000-02-15 | ||
| IT2000BO000064A IT1321014B1 (it) | 2000-02-15 | 2000-02-15 | Sistema di trasporto di contenitori, particolarmente adattoall'impiego di un impianto per la produzione di pitture, vernici e |
| IT00A000064 | 2000-02-15 | ||
| PCT/IT2001/000066 WO2001060720A1 (en) | 2000-02-15 | 2001-02-14 | A system for transporting containers, which is especially suitable for use in a plant for the production of paints, varnishes and the like |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003522700A JP2003522700A (ja) | 2003-07-29 |
| JP5215517B2 true JP5215517B2 (ja) | 2013-06-19 |
Family
ID=11438167
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001559780A Expired - Lifetime JP5215517B2 (ja) | 2000-02-15 | 2001-02-14 | 塗料、又はワニスの生産用プラントで使用する容器を輸送するためのシステム |
Country Status (19)
| Country | Link |
|---|---|
| US (1) | US6761260B2 (ja) |
| EP (1) | EP1257487B1 (ja) |
| JP (1) | JP5215517B2 (ja) |
| KR (1) | KR20020081327A (ja) |
| CN (1) | CN1199833C (ja) |
| AT (1) | ATE269829T1 (ja) |
| AU (2) | AU2001234086B2 (ja) |
| BR (1) | BR0108319B1 (ja) |
| CA (1) | CA2399794C (ja) |
| CZ (1) | CZ20022637A3 (ja) |
| DE (1) | DE60103980T2 (ja) |
| ES (1) | ES2223782T3 (ja) |
| HU (1) | HUP0204468A2 (ja) |
| IT (1) | IT1321014B1 (ja) |
| MX (1) | MXPA02007982A (ja) |
| NO (1) | NO20023881L (ja) |
| NZ (1) | NZ520483A (ja) |
| PL (1) | PL357377A1 (ja) |
| WO (1) | WO2001060720A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003072211A1 (en) * | 2002-02-25 | 2003-09-04 | Carlin Ghahraman | Four dimensional billiards |
| IT1398989B1 (it) * | 2009-07-10 | 2013-03-28 | Drocco | Linea e metodo di dosaggio e miscelazione per pitture e prodotti. |
| US20110041706A1 (en) * | 2009-08-19 | 2011-02-24 | Whetstone Jr Henry M | Chocolate manufacturing apparatus including walking beam conveyor and associated methods |
| CN103057920B (zh) * | 2012-12-20 | 2015-04-22 | 中国海洋石油总公司 | 大型工件连续等速步进式滑移运输装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3789976A (en) * | 1971-11-18 | 1974-02-05 | Msc Inc | Conveyor |
| US4151907A (en) | 1976-06-16 | 1979-05-01 | Moorfeed Corporation | Walking beam conveyor |
| JPS6026517A (ja) * | 1983-07-25 | 1985-02-09 | Takai Seisakusho:Kk | とうふ型箱搬送装置 |
| JPS60162538A (ja) * | 1984-02-06 | 1985-08-24 | Komatsu Ltd | プレス用材料搬送装置 |
| USRE32804E (en) * | 1985-08-09 | 1988-12-20 | Lamb Technicon Corp. | Workpiece transfer |
| US4687092A (en) * | 1985-12-13 | 1987-08-18 | Zenith Electronics Corporation | Proportionally displaced coupled walking beams |
| JPH0741522B2 (ja) * | 1986-02-13 | 1995-05-10 | マツダ株式会社 | トランスフア加工装置 |
| US4781285A (en) * | 1987-09-21 | 1988-11-01 | Progressive Tool & Industries Company | Soft touch drive for article handling apparatus |
| US4794863A (en) * | 1988-03-21 | 1989-01-03 | International Business Machines Corporation | Motive structure for transporting workpieces |
| JPH02210223A (ja) * | 1988-10-26 | 1990-08-21 | Kurabo Ind Ltd | 調液方法、調液装置及び容器送り装置 |
| DE3930876C1 (ja) * | 1989-09-15 | 1990-07-26 | Guenter 6080 Gross-Gerau De Kollross | |
| US5083591A (en) | 1989-11-06 | 1992-01-28 | Dunn Edwards, Corp., & Fluid Management Ltd. Part. | Process for dispensing liquid colorants into a paint can, and quality control therefor |
| US5127787A (en) * | 1990-05-24 | 1992-07-07 | Brothers Industries, Inc. | Lift and carry mechanism and method |
| US5454466A (en) * | 1993-10-21 | 1995-10-03 | Visi-Trol Engineering Company | Accumulating conveyor |
| DE4419498A1 (de) | 1994-06-03 | 1995-12-07 | Schwerdtel Ludwig Gmbh | Fördervorrichtung zum taktweisen Transport von Behältern |
-
2000
- 2000-02-15 IT IT2000BO000064A patent/IT1321014B1/it active
-
2001
- 2001-02-14 NZ NZ520483A patent/NZ520483A/en unknown
- 2001-02-14 CA CA002399794A patent/CA2399794C/en not_active Expired - Lifetime
- 2001-02-14 AU AU2001234086A patent/AU2001234086B2/en not_active Expired
- 2001-02-14 DE DE60103980T patent/DE60103980T2/de not_active Expired - Lifetime
- 2001-02-14 US US10/203,799 patent/US6761260B2/en not_active Expired - Lifetime
- 2001-02-14 WO PCT/IT2001/000066 patent/WO2001060720A1/en active IP Right Grant
- 2001-02-14 HU HU0204468A patent/HUP0204468A2/hu unknown
- 2001-02-14 EP EP01906124A patent/EP1257487B1/en not_active Expired - Lifetime
- 2001-02-14 AT AT01906124T patent/ATE269829T1/de not_active IP Right Cessation
- 2001-02-14 AU AU3408601A patent/AU3408601A/xx active Pending
- 2001-02-14 ES ES01906124T patent/ES2223782T3/es not_active Expired - Lifetime
- 2001-02-14 BR BRPI0108319-8A patent/BR0108319B1/pt not_active IP Right Cessation
- 2001-02-14 CN CNB018050042A patent/CN1199833C/zh not_active Expired - Lifetime
- 2001-02-14 JP JP2001559780A patent/JP5215517B2/ja not_active Expired - Lifetime
- 2001-02-14 CZ CZ20022637A patent/CZ20022637A3/cs unknown
- 2001-02-14 PL PL01357377A patent/PL357377A1/xx not_active Application Discontinuation
- 2001-02-14 KR KR1020027010545A patent/KR20020081327A/ko not_active Application Discontinuation
- 2001-02-14 MX MXPA02007982A patent/MXPA02007982A/es unknown
-
2002
- 2002-08-15 NO NO20023881A patent/NO20023881L/no not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| US20030127306A1 (en) | 2003-07-10 |
| CA2399794A1 (en) | 2001-08-23 |
| ATE269829T1 (de) | 2004-07-15 |
| EP1257487A1 (en) | 2002-11-20 |
| HUP0204468A2 (en) | 2003-05-28 |
| NO20023881D0 (no) | 2002-08-15 |
| ITBO20000064A1 (it) | 2001-08-15 |
| PL357377A1 (en) | 2004-07-26 |
| ES2223782T3 (es) | 2005-03-01 |
| BR0108319B1 (pt) | 2009-08-11 |
| IT1321014B1 (it) | 2003-12-18 |
| CZ20022637A3 (cs) | 2002-11-13 |
| KR20020081327A (ko) | 2002-10-26 |
| CA2399794C (en) | 2010-02-02 |
| AU3408601A (en) | 2001-08-27 |
| NZ520483A (en) | 2004-06-25 |
| US6761260B2 (en) | 2004-07-13 |
| CN1199833C (zh) | 2005-05-04 |
| DE60103980T2 (de) | 2005-06-30 |
| EP1257487B1 (en) | 2004-06-23 |
| JP2003522700A (ja) | 2003-07-29 |
| BR0108319A (pt) | 2003-03-11 |
| CN1400951A (zh) | 2003-03-05 |
| AU2001234086B2 (en) | 2005-05-12 |
| DE60103980D1 (de) | 2004-07-29 |
| WO2001060720A1 (en) | 2001-08-23 |
| NO20023881L (no) | 2002-08-15 |
| MXPA02007982A (es) | 2004-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110712793B (zh) | 一种自适应式自动装箱设备的装箱方法 | |
| US5383760A (en) | Apparatus and method for container pattern-forming and palletizing | |
| US7410045B2 (en) | Offset overhead plunger | |
| US20050034424A1 (en) | Device for filling boxes with a number of rows of objects | |
| JP5966315B2 (ja) | 重量充填装置 | |
| CN112974178A (zh) | 一种门扇喷涂线的喷涂方法 | |
| JP5215517B2 (ja) | 塗料、又はワニスの生産用プラントで使用する容器を輸送するためのシステム | |
| US20060168917A1 (en) | System and machine for strapping articles | |
| JPH0418210A (ja) | 製品を容器の中に所定の分布にして詰める装置 | |
| CN108943849B (zh) | 一种自适应瓦楞纸纸板尺寸的折箱设备 | |
| ITBO20010517A1 (it) | Metodo per il controllo dell'azionamento di un sistema di trasporto per contenitori, dispositivo di azionamento e sistema di trasporto cosi' | |
| AU2001234086A1 (en) | A system for transporting containers, which is especially suitable for use in a plant for the production of paints, varnishes and the like | |
| EP0687237B1 (en) | Article handling device | |
| CN212294154U (zh) | 面料裁剪合成系统 | |
| DE2424341A1 (de) | Maschine zum erfassen und umsetzen von lasten, insbesondere zum ent- oder beladen von paletten oder ent- oder beladen von flaschenkaesten | |
| CN113306792A (zh) | 一种聚乙烯蜡粉灌装设备 | |
| JPH059359Y2 (ja) | ||
| CN211140717U (zh) | 一种双喷码自动分料设备 | |
| PT852560E (pt) | Dispositivo para o transporte de uma camada de recipientes de vidro para cima de uma palete | |
| CA2997069C (en) | Lumber stack marking machine and methods of applying markings to lumber stacks | |
| JPH08268518A (ja) | 缶体の搬送装置、缶体の洗浄装置および缶内圧検査装置 | |
| ITBO20000327A1 (it) | Macchina automatica ad alta produzione per l'imballaggio di prodotti in scatole di cartone , preferibilmente del tipo con vassoio , formate | |
| ITBO20080603A1 (it) | Apparecchiatura per l'etichettatura di contenitori | |
| WO1980000950A1 (en) | Single line,dual station indexing packaging machine | |
| JP2018153835A (ja) | 角缶自動製造ライン用パネリング加工装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120323 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120625 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120702 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120723 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121012 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130301 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5215517 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160308 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |