JP5060404B2 - 画像処理装置、画像処理方法、およびプログラム - Google Patents
画像処理装置、画像処理方法、およびプログラム Download PDFInfo
- Publication number
- JP5060404B2 JP5060404B2 JP2008162472A JP2008162472A JP5060404B2 JP 5060404 B2 JP5060404 B2 JP 5060404B2 JP 2008162472 A JP2008162472 A JP 2008162472A JP 2008162472 A JP2008162472 A JP 2008162472A JP 5060404 B2 JP5060404 B2 JP 5060404B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- sheet
- handwritten
- mark
- composite sheet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/387—Composing, repositioning or otherwise geometrically modifying originals
- H04N1/3872—Repositioning or masking
- H04N1/3873—Repositioning or masking defined only by a limited number of coordinate points or parameters, e.g. corners, centre; for trimming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/0035—User-machine interface; Control console
- H04N1/00352—Input means
- H04N1/00355—Mark-sheet input
- H04N1/00358—Type of the scanned marks
- H04N1/00366—Marks in boxes or the like, e.g. crosses or blacking out
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/0035—User-machine interface; Control console
- H04N1/00352—Input means
- H04N1/00355—Mark-sheet input
- H04N1/00368—Location of the scanned marks
- H04N1/00374—Location of the scanned marks on the same page as at least a part of the image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/0035—User-machine interface; Control console
- H04N1/00352—Input means
- H04N1/00355—Mark-sheet input
- H04N1/00376—Means for identifying a mark sheet or area
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/0035—User-machine interface; Control console
- H04N1/00352—Input means
- H04N1/00355—Mark-sheet input
- H04N1/00379—Means for enabling correct scanning of a mark sheet or area, e.g. registration or timing marks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00962—Input arrangements for operating instructions or parameters, e.g. updating internal software
- H04N1/00968—Input arrangements for operating instructions or parameters, e.g. updating internal software by scanning marks on a sheet
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/387—Composing, repositioning or otherwise geometrically modifying originals
- H04N1/3871—Composing, repositioning or otherwise geometrically modifying originals the composed originals being of different kinds, e.g. low- and high-resolution originals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/387—Composing, repositioning or otherwise geometrically modifying originals
- H04N1/3877—Image rotation
- H04N1/3878—Skew detection or correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/0035—User-machine interface; Control console
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0077—Types of the still picture apparatus
- H04N2201/0082—Image hardcopy reproducer
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0077—Types of the still picture apparatus
- H04N2201/0091—Digital copier; digital 'photocopier'
Description
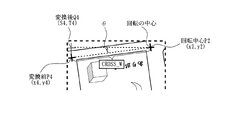
S16で、図7(c)に示す画像のうちで、手書きエリア54が,画像に対して平行になるように、画像(c)を回転する。
S16で、上記ホモグラフィー変換の代わりに、アフィン変換を用いるようにしてもよい。
sin(θ+180°)=−sinθ、cos(θ+180°)=−cosθ
であるので、時計回りに(θ+180)度回転させるには、式(26a)と式(26b)から求めたsinθとcosθとをそれぞれ負数にしたものを、式(14a)に代入すればよいことが分かる。
10…スキャナ部、
20…プリンタ部、
30…操作部、
40…制御部、
SH1、SH2、SH3、SH4…手書き合成シート、
51…手書き合成シート判別マーク、
52…用紙選択エリア、
53a〜53d…エリア検出マーク、
54…手書きエリア、
54a、54b…写真画像の一部、
55…手書き画像、
62…相対位置マーク、
64a…エリア検出マーク。
Claims (7)
- ユーザが合成対象の付加画像を付加するためのシートに対応する画像を、印刷装置にシートへ印刷させる印刷制御手段と、
前記印刷制御手段により印刷されたシートを読取装置が読み取って得られた読取画像を取得する取得手段と、
前記取得手段により取得された読取画像に基づき、前記シートの傾きを特定する特定手段と、
前記読取画像に基づき、ユーザにより前記シートに付加された合成対象の付加画像を含む、当該シートの一部である所定領域の画像を、当該読取画像から抽出する第1の抽出手段と、
前記第1の抽出手段により当該読取画像から抽出された前記所定領域の画像を、前記特定手段により特定された当該シートの傾きに従って回転する回転手段と、
前記回転手段により回転された前記所定領域の画像に基づき、ユーザにより前記シートに付加された合成対象の付加画像を当該所定領域の画像から抽出する第2の抽出手段と、
前記第2の抽出手段により抽出された前記合成対象の付加画像と、メモリに記憶されている画像とを合成する合成手段と、
を有することを特徴とする画像処理装置。 - 請求項1において、
前記印刷制御手段により印刷される前記シートは、ユーザが合成対象の付加画像を付加するための前記所定領域を特定するためのマークを含むシートであって、
前記第1の抽出手段は、前記取得手段により取得された読取画像に含まれている前記マークに基づき、当該読取画像から前記所定領域の画像を抽出することを特徴とする画像処理装置。 - 請求項2において、
前記印刷制御手段によりシートに印刷される前記マークは、当該シートの傾きと、当該シートにおける前記所定領域を特定するためのマークであり、
前記特定手段は、前記読取画像に含まれる前記マークに基づき、前記シートの傾きを特定することを特徴とする画像処理装置。 - 請求項2または3において、
前記印刷制御手段は、シートの傾きを特定するための複数のマークを印刷させ、
前記特定手段は、前記読取画像に含まれる前記複数のマークの、当該読取画像における位置に基づき、前記シートの傾きを特定することを特徴とする画像処理装置。 - 請求項2乃至4のいずれか1項において、
前記第1の抽出手段は、前記マークを内部に含む矩形領域の画像を抽出することを特徴とする画像処理装置。 - ユーザが合成対象の付加画像を付加するためのシートに対応する画像を、印刷装置にシートへ印刷させる印刷制御工程と、
前記印刷制御工程において印刷されたシートを読取装置が読み取って得られた読取画像を取得する取得工程と、
前記取得工程において取得された読取画像に基づき、前記シートの傾きを特定する特定工程と、
前記読取画像に基づき、ユーザにより前記シートに付加された合成対象の付加画像を含む、当該シートの一部である所定領域の画像を、当該読取画像から抽出する第1の抽出工程と、
前記第1の抽出工程において当該読取画像から抽出された前記所定領域の画像を、前記特定工程において特定された当該シートの傾きに従って回転する回転工程と、
前記回転工程において回転された前記所定領域の画像に基づき、ユーザにより前記シートに付加された合成対象の付加画像を当該所定領域の画像から抽出する第2の抽出工程と、
前記第2の抽出工程において抽出された前記合成対象の付加画像と、メモリに記憶されている画像とを合成する合成工程と、
を有することを特徴とする画像処理方法。 - 請求項6に記載の画像処理方法をコンピュータに実行させるためのプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162472A JP5060404B2 (ja) | 2008-06-20 | 2008-06-20 | 画像処理装置、画像処理方法、およびプログラム |
| US12/485,331 US9204009B2 (en) | 2008-06-20 | 2009-06-16 | Image forming apparatus |
| CN2009101472850A CN101610334B (zh) | 2008-06-20 | 2009-06-19 | 图像形成设备及其控制方法 |
| CN201210028979.4A CN102611817B (zh) | 2008-06-20 | 2009-06-19 | 图像处理设备和图像处理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162472A JP5060404B2 (ja) | 2008-06-20 | 2008-06-20 | 画像処理装置、画像処理方法、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010004405A JP2010004405A (ja) | 2010-01-07 |
| JP2010004405A5 JP2010004405A5 (ja) | 2011-08-04 |
| JP5060404B2 true JP5060404B2 (ja) | 2012-10-31 |
Family
ID=41430905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008162472A Active JP5060404B2 (ja) | 2008-06-20 | 2008-06-20 | 画像処理装置、画像処理方法、およびプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9204009B2 (ja) |
| JP (1) | JP5060404B2 (ja) |
| CN (2) | CN102611817B (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110199624A1 (en) * | 2010-02-12 | 2011-08-18 | Kabushiki Kaisha Toshiba | Method and apparatus for processing image |
| JP5618634B2 (ja) * | 2010-05-31 | 2014-11-05 | キヤノン株式会社 | 情報処理装置およびその動作方法 |
| US8531482B2 (en) * | 2010-06-25 | 2013-09-10 | Eastman Kodak Company | Use of handwritten notations from photographs |
| JP2014086836A (ja) * | 2012-10-23 | 2014-05-12 | Canon Inc | 画像処理装置及びその制御方法、並びにプログラム |
| US20140136962A1 (en) * | 2012-11-12 | 2014-05-15 | Vistaprint Technologies Limited | Method and System for Detecting and Removing Printer Control Marks from Rasterized Image for Placement in Image Container of Document Template |
| JP5942846B2 (ja) * | 2012-12-27 | 2016-06-29 | ブラザー工業株式会社 | 画像形成装置および画像形成プログラム |
| US9071785B2 (en) * | 2013-02-15 | 2015-06-30 | Gradeable, Inc. | Adjusting perspective distortion of an image |
| JP6150652B2 (ja) * | 2013-07-29 | 2017-06-21 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法及びプログラム並びに記録媒体 |
| JP6376743B2 (ja) * | 2013-10-18 | 2018-08-22 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、撮像システムの制御方法、及びプログラム |
| TWI574542B (zh) * | 2014-12-10 | 2017-03-11 | 圓展科技股份有限公司 | 視訊會議裝置及其控制方法 |
| CN104935828A (zh) * | 2015-05-20 | 2015-09-23 | 镇江东软信息技术有限公司 | 一种图像处理系统 |
| US20170372414A1 (en) * | 2016-06-22 | 2017-12-28 | Ricoh Company, Ltd. | Information processing system and information processing apparatus |
| EP3488295B1 (en) * | 2016-07-21 | 2021-09-22 | Esko-Graphics Imaging GmbH | System and process for mounting a printing plate on a carrier |
| EP3672809B1 (en) | 2017-08-24 | 2022-01-19 | Esko-Graphics Imaging GmbH | Printing plate segment mounting system and method |
| JP2021136665A (ja) * | 2020-02-28 | 2021-09-13 | キヤノン株式会社 | 撮像装置、デバイス、制御方法、及びプログラム |
| JP2022007247A (ja) * | 2020-06-26 | 2022-01-13 | 東芝テック株式会社 | 画像処理装置及び画像形成装置 |
| JP2022159844A (ja) * | 2021-04-05 | 2022-10-18 | キヤノン株式会社 | 画像形成装置、その制御方法、及びプログラム |
| JP2023130616A (ja) * | 2022-03-08 | 2023-09-21 | 東芝テック株式会社 | 画像処理装置及び画像形成装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH099014A (ja) * | 1995-06-22 | 1997-01-10 | Casio Comput Co Ltd | エリアイメージセンサ付き画像処理装置 |
| JP2000118072A (ja) * | 1998-10-12 | 2000-04-25 | Sony Corp | 印画方法及びプリンタ装置 |
| JP2003080789A (ja) | 2001-09-12 | 2003-03-19 | Seiko Epson Corp | 画像出力装置 |
| JP2004338367A (ja) | 2003-04-25 | 2004-12-02 | Konica Minolta Photo Imaging Inc | 画像形成装置における出力補正方法及び画像形成装置 |
| US7525675B2 (en) * | 2004-02-06 | 2009-04-28 | Hewlett-Packard Development Company, L.P | Image printing via a proof sheet |
| EP1628240B1 (en) | 2004-08-10 | 2008-03-05 | Océ-Technologies B.V. | Outlier detection during scanning |
| JP4661446B2 (ja) | 2005-08-12 | 2011-03-30 | セイコーエプソン株式会社 | 合成画像形成装置 |
| JP4581902B2 (ja) * | 2005-08-12 | 2010-11-17 | セイコーエプソン株式会社 | 合成画像形成装置 |
-
2008
- 2008-06-20 JP JP2008162472A patent/JP5060404B2/ja active Active
-
2009
- 2009-06-16 US US12/485,331 patent/US9204009B2/en not_active Expired - Fee Related
- 2009-06-19 CN CN201210028979.4A patent/CN102611817B/zh not_active Expired - Fee Related
- 2009-06-19 CN CN2009101472850A patent/CN101610334B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20090316163A1 (en) | 2009-12-24 |
| US9204009B2 (en) | 2015-12-01 |
| CN101610334A (zh) | 2009-12-23 |
| CN102611817B (zh) | 2016-06-29 |
| CN101610334B (zh) | 2012-03-28 |
| JP2010004405A (ja) | 2010-01-07 |
| CN102611817A (zh) | 2012-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5060404B2 (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| US7880921B2 (en) | Method and apparatus to digitally whiteout mistakes on a printed form | |
| US8498024B2 (en) | Image processing apparatus, method, and storage medium for information processing according to information on a scanned sheet | |
| US8285080B2 (en) | Image processing apparatus and image processing method | |
| EP1922693B1 (en) | Image processing apparatus and image processing method | |
| US8023743B2 (en) | Image processing apparatus and image processing method | |
| US8780407B2 (en) | Control apparatus, image reading apparatus, image forming apparatus, and recording medium for efficient rereading | |
| US7986832B2 (en) | Image combining apparatus and control method for the same | |
| JP5861503B2 (ja) | 画像検査装置及び方法 | |
| US8493629B2 (en) | Image processing apparatus, method, and computer program | |
| US20120120099A1 (en) | Image processing apparatus, image processing method, and storage medium storing a program thereof | |
| US8660357B2 (en) | Image processing apparatus, method, and computer program | |
| JP2008113410A (ja) | 画像処理装置およびその制御方法、画像読取システムにおける読取方法 | |
| WO2020255971A1 (ja) | 判定装置、判定装置の制御方法、判定システム、判定システムの制御方法、及び、プログラム | |
| US20090244570A1 (en) | Face image-output control device, method of controlling output of face image, program for controlling output of face image, and printing device | |
| JP3582988B2 (ja) | 非接触型画像読取装置 | |
| US8315480B2 (en) | Image processing apparatus, image processing method, and program to execute the image processing method | |
| JP2000209433A (ja) | 画像形成装置 | |
| JP4232050B2 (ja) | タイリングオフセット出力システム | |
| JP4232051B2 (ja) | タイリングオフセット出力システム | |
| JP2010041673A (ja) | 画像処理システム、画像処理装置及び画像制御方法 | |
| JP2008219210A (ja) | 画像処理装置および画像処理プログラム | |
| JP2004318896A (ja) | 非接触型画像読取装置 | |
| JP4725463B2 (ja) | 画像処理装置、画像処理方法およびそのコンピュータ・プログラム | |
| JP2005210365A (ja) | 画像データ補間装置、画像データ補間方法および画像データ補間プログラム。 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110620 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110620 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120413 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120706 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120803 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5060404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150810 Year of fee payment: 3 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |