JP5048858B2 - オーバーチューブ及び処置システム - Google Patents
オーバーチューブ及び処置システム Download PDFInfo
- Publication number
- JP5048858B2 JP5048858B2 JP2011168307A JP2011168307A JP5048858B2 JP 5048858 B2 JP5048858 B2 JP 5048858B2 JP 2011168307 A JP2011168307 A JP 2011168307A JP 2011168307 A JP2011168307 A JP 2011168307A JP 5048858 B2 JP5048858 B2 JP 5048858B2
- Authority
- JP
- Japan
- Prior art keywords
- balloon
- balloons
- overtube
- air supply
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/01—Guiding arrangements therefore
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00039—Operational features of endoscopes provided with input arrangements for the user
- A61B1/00042—Operational features of endoscopes provided with input arrangements for the user for mechanical operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00082—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/273—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the upper alimentary canal, e.g. oesophagoscopes, gastroscopes
- A61B1/2736—Gastroscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00043—Operational features of endoscopes provided with output arrangements
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Physics & Mathematics (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Gastroenterology & Hepatology (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
- Media Introduction/Drainage Providing Device (AREA)
Description
例えば、特許文献2には、チューブ本体に適当な間隔で例えば3個の膨張可能なバルーンを形成し、使用時には、各バルーンに出血の胃への進入防止、止血、血流の逆流防止などの役割を持たせることが開示されている。また、特許文献3には、胃バルーンと食道バルーンを用いた吸引管の例が開示されており、胃バルーンは膨張時には2つの球を連ねた形状を成して、胃の噴門を囲む胃壁に当接する。このときの接触面積は球体状バルーンよりも小さく、これにより、吸引管の引っ張り具合に好適であるとしている。
さらに、特許文献5には、複数のバルーンを、可撓性を有する連結部で縦列に連結したバルーンカテーテルが開示されている。このバルーンカテーテルは脳血管などに挿入され、ステントの埋め込みなどに使用される。この複数のバルーンのうち、病変部以外のバルーンは膨張しないように膨張度を制御できる。
この実施例によれば、本発明に係るオーバーチューブを用いた処置システムは、通常の患者の胃、十二指腸球部、十二指腸などの体腔や管腔の診断・処置に適用可能であるほか、Roux-en-Y再建法が施された患者のファーター乳頭部への膵胆処置にも適用可能である。
図1〜7を参照して、第1の実施例に係る処置システム及び処置方法を説明する。
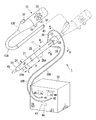
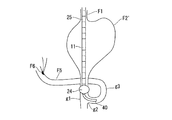
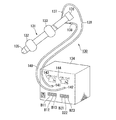
図1に、この処置システムの主要部の構成を示す。同図に示すように、この処置システム1は、バルーンを装着したオーバーチューブ11と、このオーバーチューブ11のバルーンの膨張・収縮を制御する送気装置12と、オーバーチューブ11と共に被検体の体腔や管腔(例えば、経口的に胃や十二指腸)に挿入される内視鏡13とを備える。内視鏡13は、オーバーチューブ11の挿通チャンネルに挿入部が挿通され、かつ、その挿通状態でオーバーチューブ11を先導するように被検体の体腔や管腔に挿入される。
まず、内視鏡13の挿入部13Aをオーバーチューブ11の挿通チャンネルP1に挿入する。このとき、バルーン24、25は収縮させている。なお、かかる挿入前に、オーバーチューブ11の送水口金26、27を介して、又は、内視鏡の挿入部13Aの先端の送水チャンネル(図示せず)から送水を行ない、挿通チャンネルP1の壁面を濡らす。これにより、挿入部13Aの挿通チャンネルP1に対する挿通性が良くなる。その上で、挿入部13Aを挿通チャンネルP1に挿入し、挿入部13Aの先端部40をオーバーチューブ11の先端部22より少し突出させる(図1の仮想線参照)。これにより、挿入部13AのCCDカメラによる視野が確保される。
図8に、上述した実施例の変形例1を示す。この変形例1は、オーバーチューブ11の2つのバルーン24、25を装備する点では上述の実施例と同じであるが、バルーン24、25の位置が異なる。この両バルーン24、25の軸方向の位置を接近させ、一方の先頭側のバルーン24を十二指腸球部F4に、残りの後ろ側のバルーン25を胃F2の後壁の位置にそれぞれ位置決めしている。これにより、膨張時には、図8に示す如く、バルーン24、25が幽門輪F3を挟んで位置し、且つ、その前後の位置でオーバーチューブ11の位置を確実に固定できる。
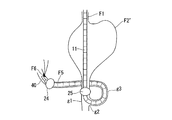
図9〜14に、上述した実施例の変形例2を示す。この変形例2は、変形例1と同様に、オーバーチューブ11の2つのバルーン24、25を装備する点では上述の実施例と同じであるが、バルーン24、25の位置が異なる。具体的には、この変形例2に係るオーバーチューブ11は、Roux-en-Y再建法が施された患者のファーター乳頭部への膵胆処置のために設計されたものである。
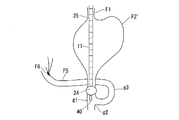
まず、図9に示す如く、内視鏡13を挿通させたオーバーチューブ11を経口的に再建された胃F2’を介して空腸g1に挿入し、内視鏡13の挿入部13Aの先端部40が空腸・空腸吻合部g2を臨む所定の位置で一旦、挿入を止める。
次いで、図11に示す如く、医師は内視鏡13を操作して、その挿入部13Aの先端部40を湾曲させながら内視鏡13を推し進め、その挿入部40を空腸・空腸吻合部g2に挿入する。このとき、バルーン11の先端の位置は空腸g1に対して固定されているため、かかる挿入操作が容易になる。
この後、図12に示す如く、内視鏡13の挿入部13Aを進めて空腸吻合屈曲部g3及び十二指腸F5を通過させ、挿入部13Aの先端40がファーター乳頭部F6を臨む所定位置まで到達させる。
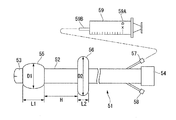
図15に、上述した実施例の変形例3を示す。この変形例3は、送気をより簡単にしたオーバーチューブに関する。
図15に示すオーバーチューブ51は、可撓管部52と、その両端に位置して当該可撓管部52と一体に形成された先端部53及びグリップ54を備える。可撓管部52は、2つの膨張・収縮可能な第1、第2のバルーン55、56を先端側からこの順に備えている。また、可撓管部52には、バルーン55、56に送気するための送気口金57、58が装着されている。これらの構成要素は、前述した第1の実施例と同等である。
また、バルーン径D1、D2は、それぞれのバルーンが目的とする臓器(異なる臓器)に固定するときに最適な径になるように、バルーン長L1、L2及び空気充填量がそれぞれ所定値に設定されている。
図16(a)、16(b)、及び17を参照して、変形例4を説明する。
この変形例4は、上述した変形例3を更に発展させたもので、図16(a)に示すように、オーバーチューブ61は、可撓管部62と、その両端に位置して当該可撓管部62と一体に形成された先端部63及びグリップ64を備える。可撓管部62は、4つの膨張・収縮可能な第1〜第4のバルーン65〜68を先端側からこの順に備えている。また、可撓管部62には、バルーン65〜68に送気するための送気口金69〜72(口金72は、図16(b)を参照)が装着されている。送気口金69〜72のそれぞれは送気チャンネル69A〜72Aをそれぞれ介してバルーン65〜68に個別に連通している。これらの構成要素自体は、前述した第1の実施例のものと同等である。
・第1のバルーン65は、十二指腸に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D1=20〜50mmの許容範囲の所望値に、
・第2のバルーン66は、十二指腸球部に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D2=20〜60mmの許容範囲の所望値に、
・第3のバルーン67は、胃(幽門輪)に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D3=30〜70mmの許容範囲の所望値に、
・第4のバルーン68は、空腸に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D4=20〜40mmの許容範囲の所望値になるように、各バルーンの長さが予めそれぞれ設定されている。
このため、バルーン径はそれぞれの許容範囲の最高値でみると、D3>D2>D1>D4の関係にある。
・第1、第2のバルーン65、66間の離間距離H1=30〜100mmの許容範囲の所望値に、
・第2、第3のバルーン66、67間の離間距離H2=5〜20mmの許容範囲の所望値に、
・第1、第4のバルーン65、68間の離間距離H4=200〜500mmの許容範囲の所望値に(ただし、第2及び第3のバルーン66、67のバルーン長分の長さを含む)、
・第3、第4のバルーン67、68間の離間距離H3は、離間距離H1、H2、H4に応じて決まる値に、それぞれ設定されている。
このため、離間距離については、H4>H1>H2の関係にある。
・第1の位置固定パターン(第1パターン)は、図17(a)に示すように、第1のバルーン65を十二指腸F5に固定させ、第2のバルーン66を十二指腸球部F4に固定させ、残りの第3、第4のバルーン67、68を使用しない(膨張させない)パターン、
・第2の位置固定パターン(第2パターン)は、Roux-en-Y再建法が施された患者のファーター乳頭部への膵胆処置に適用するもので、図17(b)に示すように、第1のバルーン65を十二指腸F5に固定させ、第2及び第3のバルーン66、67を使用せず、第4のバルーン68を空腸g1に固定させるパターン、
・第3の位置固定パターン(第3パターン)は、図17(c)に示すように、第1のバルーン65を使用せず、第2のバルーン66を十二指腸球部F4に固定させ、第3のバルーン67を胃(幽門輪)F3に固定させ、第4のバルーン68を使用しないパターン、
・第4の位置固定パターン(第4パターン)は、Roux-en-Y再建法が施された患者のファーター乳頭部への膵胆処置に適用するもので、図17(d)に示すように、第1のバルーン65を十二指腸F5に固定させ、第2のバルーン66を十二指腸空腸曲F7に固定させ、残りの第3、第4のバルーン67、68を使用しない(膨張させない)パターン、である。
図18及び19を参照して、変形例5を説明する。
この変形例5は、変形例4と同様に、上述した変形例3を更に発展させたもので、図18に示すように、オーバーチューブ81は、可撓管部82と、その両端に位置して当該可撓管部82と一体に形成された先端部83及びグリップ84を備える。可撓管部82は、3つの膨張・収縮可能な第1〜第3のバルーン85〜87を先端側からこの順に備えている。また、可撓管部82には、バルーン85〜87に送気するための送気口金88〜90が装着されている。送気口金88〜90のそれぞれは図示しない送気チャンネルをそれぞれ介してバルーン85〜87に個別に連通している。これらの構成要素自体は、前述した第1の実施例のものと同等である。
バルーン径については、
・第1のバルーン85は、十二指腸F5に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D1=20〜50mmの許容範囲の所望値に、
・第2のバルーン86は、噴門部F9に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D2=30〜70mmの許容範囲の所望値に、
・第3のバルーン87は、食道F1に固定するためのバルーンであり、規定量の送気による膨張時には、バルーン径D3=15〜25mmの許容範囲の所望値に、それぞれ設定されている。
このため、バルーン径はそれぞれの許容範囲の最高値でみると、D2>D1>D3の関係にある。
・第1、第2のバルーン85、86間の離間距離H1=150〜300mmの許容範囲の所望値に、
・第2、第3のバルーン86、87間の離間距離H2=5〜20mmの許容範囲の所望値に、それぞれ設定されている。
このため、離間距離については、H1>H2の関係にある。
この場合も、上述のバルーン径及び離間距離について許容範囲を設定している理由は、患者の個人差を考慮したものである。
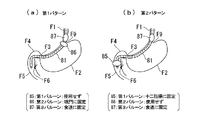
・第1の位置固定パターン(第1パターン)は、図19(a)に示すように、第1のバルーン85を使用せず、第2のバルーン86を噴門部F9に固定させ、残りの第3のバルーン87を食道F1に固定させるパターン、
・第2の位置固定パターン(第2パターン)は、図19(b)に示すように、第1のバルーン85を十二指腸F5に固定させ、第2のバルーン86を使用せず、第3のバルーン87を食道F1に固定させるパターン、である。
図20及び21を参照して、変形例6を説明する。この変形例6は、同じバルーンであっても、位置固定をさせる部位の種類に応じて内腔体積を変えるようにしたオーバーチューブに関する。
具体的には、第1の位置固定パターン(第1パターン)は、図21(a)に示すように、第1のバルーン95を十二指腸F5に固定するために使用し、第2のバルーン96を十二指腸球部F4に固定するために使用し、第3のバルーン97を使用しない(膨張させない)という使い方である。
さらに、第2の位置固定パターン(第2パターン)は、図21(b)に示すように、第1のバルーン95を使用せず、第2のバルーン96を十二指腸球部F4に固定するために使用し、第3のバルーン97を胃(幽門輪)F3に固定するために使用するという使い方である。
これにより、1つのオーバーチューブ91を用いて、第1〜第2の何れかの位置固定パターンに基づいて確実な位置固定機能が発揮される。
図22及び23を参照して、変形例7を説明する。この変形例7は、上述した変形例6を更に変形させた構成を示す。このため、変形例6において示した構成要素と同じ又は同等な構成要素には同一符号を用いる。
具体的には、第1の位置固定パターン(第1パターン)は、図23(a)に示すように、第1のバルーン95を十二指腸F5に固定するために使用し、第2のバルーン96を十二指腸球部F4に固定するために使用し、第3のバルーン97’を使用しない(膨張させない)という使い方である。
第2の位置固定パターン(第2パターン)は、図23(b)に示すように、第1のバルーン95を十二指腸F5に固定するために使用し、第2のバルーン96を使用せず、第3のバルーン97’を空腸g1に固定するために使用するという使い方である。
これにより、1つのオーバーチューブ91’を用いて、第1〜第2の何れかの位置固定パターンに基づいて確実な位置固定機能が発揮される。
図24〜26に基づいて変形例8を説明する。この変形例8は、術者の誤操作を防止する観点から位置固定パターン毎に使用する送気ポートにマーカを付設する構成に関する。
・第1の位置固定パターンであり、図25(a)に示すように、第1のバルーン65を十二指腸F5に固定させ、第2のパターン66を十二指腸球部F4に固定させ、残りの第3、第4のバルーン67、68を使用しない(膨張させない)パターン、
・第2の位置固定パターンであり、図25(b)に示すように、第1のバルーン65を十二指腸F5に固定させ、第2及び第3のバルーン66、67を使用せず、第4のバルーン68を空腸g1に固定させるパターン、
・第3の位置固定パターンであり、図25(c)に示すように、第1のバルーン65を使用せず、第2のパターン66を十二指腸球部F4に固定させ、第3のバルーン67を胃(幽門輪)F3に固定させ、第4のバルーン68を使用しないパターン、及び、
・第4の位置固定パターンであり、図25(d)に示すように第1のバルーン65を十二指腸F5に固定させ、第2のパターン66を十二指腸空腸曲F7に固定させ、残りの第3、第4のバルーン67、68を使用しない(膨張させない)パターン、
の4パターンであるとする。
・第1の位置固定パターンに対応すべく、図26(a)に示すように、第1及び第2のバルーン65、66に夫々連通する第1及び第2の送気口金69、70のアーム部分に共通のマーカ「丸印(○)」が付され、
・第2の位置固定パターンに対応すべく、図26(b)に示すように、第1及び第4のバルーン65、68に夫々連通する第1及び第4の送気口金69、72のアーム部分に共通のマーカ「三角印(△)」が付され、
・第3の位置固定パターンに対応すべく、図26(c)に示すように、第2及び第3のバルーン66、67に夫々連通する第2及び第3の送気口金70、71のアーム部分に共通のマーカ「星印(☆)」が付され、及び、
・第4の位置固定パターンに対応すべく、図26(d)に示すように、第1及び第2のバルーン65、66に夫々連通する第2及び第3の送気口金69、70のアーム部分に共通のマーカ「四角印(□)」が付されている。
図27〜29(及び図16A、16B、17A〜17D)を参照して、本発明に係る処置システムの第2の実施例を説明する。
この第2の実施例は、前述した複数種の位置固定パターンが事前にプリセットされており、所望のパターンを選択するだけでパターンに沿ったバルーンにそれぞれ規定量の送気を行なうことが可能な構成に関する。
なお、前述した実施例及び変形例と同等又は同一の構成要素には同一の符号を付して、説明を簡単化することとする。
このコントローラ121では、CPU121Aはメモリ121Bに予め格納された送気制御のためのプログラムをワークエリアに読み出し、そのプログラムに記載された手順を順次実行して送気制御を行うように構成されている。
図30に、第2の実施例の変形例を示す。この変形例は、上述した複数の位置固定パターンにおける各バルーンの作動状況を横割りに編成したものである。つまり、第2の実施例の場合、位置固定パターン毎に作動させる複数のバルーンを決めて当該複数のバルーンがどこの位置固定を担うのかについて予めプリセットしていた。これを横割りとすると、本変形例の場合には、バルーン毎に位置固定可能な3つのモードが設定されている。このため、各バルーンについて、3つのモードの中から1つずつ所望のモードを選択し、それらの組み合わせで送気を自動制御するようにする。
このコントロールボックス134には、第1のバルーン132に対する3つの選択ボタンB11、B12、B13が選択的に押圧操作可能に設置されると共に、第2のバルーン133に対する3つの選択ボタンB21、B22、B23が選択的に押圧操作可能に設置されている。
・ボタンB11は十二指腸F5に固定させるための所定量の送気を担うスイッチ、
・ボタンB12は十二指腸球部F4に固定させるための所定量の送気を担うスイッチ、
・ボタンB13は空腸g1に固定させるための所定量の送気を担うスイッチ、
である。
また、第2のバルーン133に対する3つの選択ボタンB21、B22、B23のうち、
・ボタンB21は十二指腸球部F4に固定させるための所定量の送気を担うスイッチ、
・ボタンB22は胃(幽門輪)F3に固定させるための所定量の送気を担うスイッチ、
・ボタンB23は空腸g1に固定させるための所定量の送気を担うスイッチ、
である。
この変形例によっても、オーバーチューブ131を各臓器に確実に固定することができる。
11、51、61、81、91、91’ オーバーチューブ
13 内視鏡
21、52、62、82、92 可撓管部
24、25、55、56、65、66、67、68、85、86、87、95、96、96’、97、97’ バルーン
69、70、71、72 口金
121 コントローラ(制御器)
122 送気装置(流体供給手段)
F1 食道
F2 胃
F4 十二指腸球部
F5 十二指腸
F9 噴門部
g1 空腸
M マーカ
P1 挿通チャンネル
Claims (5)
- 内視鏡を挿通させる挿通チャンネルを有する可撓管部と、
前記可撓管部の外周面の、前記可撓管部の軸方向に異なる位置に取り付けられ、それぞれ独立して膨張・収縮可能に構成された複数のバルーンと、
を備え、
前記複数のバルーンは、
前記被検体の十二指腸に固定される第1バルーンと、
前記第1バルーンよりも基端側に設けられ、前記被検体の空腸に固定される第2バルーンと、
を含み、
同一量に規定された最大量の流体を供給して膨張させたときの前記複数のバルーンの膨張径及び前記バルーンの取り付け位置は、前記複数のバルーンが固定される被検体の体腔又は管腔の径及び位置にもとづいて設定されており、且つ、前記第2バルーンの前記膨張径は前記第1バルーンの前記膨張径未満であり、さらに、前記第1バルーンと前記第2バルーンとの間の距離は200mm以上500mm以下であり、前記複数のバルーンを選択的に膨張させることによって前記体腔又は管腔の異なる複数の所定位置に固定できることを特徴とするオーバーチューブ。 - 前記複数のバルーンは、膨張時の内腔体積が同一であり、前記可撓管部の軸線方向における寸法が異なる少なくとも2つ以上のバルーンを含むことを特徴とする請求項1に記載のオーバーチューブ。
- 前記可撓管部に設けられ、前記複数のバルーンに流体を個別に供給するための複数の口金をさらに備え、
前記複数の口金には、各々の前記所定位置に固定する際に選択的に膨張される前記複数のバルーンに対応するように、共通のマーカが設けられていることを特徴とする請求項1に記載のオーバーチューブ。 - 内視鏡と、
請求項1に記載のオーバーチューブと、
前記オーバーチューブに取り付けられた複数のバルーンの選択的な膨張を制御する制御器と、
を備えたことを特徴とする処置システム。 - 請求項4に記載の処置システムにおいて、
前記複数のバルーンに流体を供給する流体供給手段をさらに備え、
前記制御器は、前記所定位置に応じて前記複数のバルーンのうちの少なくとも2つに、前記流体供給手段を介して選択的に流体を供給して膨張させることを特徴とする処置システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/732,660 | 2007-04-04 | ||
| US11/732,660 US20080249358A1 (en) | 2007-04-04 | 2007-04-04 | Therapeutic method and therapeutic system that use overtube with balloons |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008097380A Division JP4995136B2 (ja) | 2007-04-04 | 2008-04-03 | オーバーチューブ及び処置システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011240152A JP2011240152A (ja) | 2011-12-01 |
| JP5048858B2 true JP5048858B2 (ja) | 2012-10-17 |
Family
ID=39561982
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008097380A Expired - Fee Related JP4995136B2 (ja) | 2007-04-04 | 2008-04-03 | オーバーチューブ及び処置システム |
| JP2011168307A Active JP5048858B2 (ja) | 2007-04-04 | 2011-08-01 | オーバーチューブ及び処置システム |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008097380A Expired - Fee Related JP4995136B2 (ja) | 2007-04-04 | 2008-04-03 | オーバーチューブ及び処置システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20080249358A1 (ja) |
| EP (1) | EP1977679B1 (ja) |
| JP (2) | JP4995136B2 (ja) |
| DE (1) | DE602008002169D1 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2008310975B2 (en) * | 2007-10-09 | 2013-08-22 | Cook Medical Technologies Llc | Systems, devices and methods having an overtube for accessing a bodily opening |
| WO2009111630A1 (en) | 2008-03-06 | 2009-09-11 | Wilson-Cook Medical, Inc. | Medical systems for accessing an internal bodily opening |
| EP3005959B1 (en) | 2008-05-15 | 2019-04-03 | Cook Medical Technologies LLC | Systems for accessing a bodily opening |
| US8529612B2 (en) * | 2008-06-24 | 2013-09-10 | Mayo Foundation For Medical Education And Research | Gastroduodenal balloon tubes and methods for use in localized hypothermia |
| US8834361B2 (en) | 2009-05-15 | 2014-09-16 | Cook Medical Technologies Llc | Systems, devices and methods for accessing a bodily opening |
| JP5647780B2 (ja) * | 2009-10-20 | 2015-01-07 | Hoya株式会社 | 処置用オーバーチューブ及び処置システム |
| US10485401B2 (en) | 2009-12-15 | 2019-11-26 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US10149601B2 (en) | 2009-12-15 | 2018-12-11 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US9986893B2 (en) | 2009-12-15 | 2018-06-05 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US11986150B2 (en) | 2009-12-15 | 2024-05-21 | Lumendi Ltd. | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US8979884B2 (en) | 2009-12-15 | 2015-03-17 | Cornell University | Method and apparatus for stabilizing, straightening, expanding and/or flattening the side wall of a body lumen and/or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same |
| US12121209B2 (en) | 2014-02-11 | 2024-10-22 | Cornell University | Method and apparatus for providing increased visualization and manipulation of a body side wall |
| US11877722B2 (en) | 2009-12-15 | 2024-01-23 | Cornell University | Method and apparatus for manipulating the side wall of a body lumen or body cavity |
| JP2011200403A (ja) * | 2010-03-25 | 2011-10-13 | Fujifilm Corp | オーバーチューブ把手及びオーバーチューブ |
| WO2013117970A1 (en) * | 2012-02-06 | 2013-08-15 | HIROYUKI, Gomi | Movable balloon prosthesis for endoscopes |
| JP5752740B2 (ja) * | 2013-05-15 | 2015-07-22 | 富士システムズ株式会社 | 内視鏡用スライディングチューブ |
| WO2015127265A1 (en) * | 2014-02-24 | 2015-08-27 | Visualization Balloons, Llc | Gastrointestinal endoscopy with attachable intestine pleating structures |
| CN105873492B (zh) * | 2014-05-29 | 2018-09-18 | 奥林巴斯株式会社 | 内窥镜系统 |
| US10765304B2 (en) * | 2015-09-28 | 2020-09-08 | Bio-Medical Engineering (HK) Limited | Endoscopic systems, devices, and methods for performing in vivo procedures |
| CN106264426B (zh) * | 2016-06-29 | 2017-12-08 | 胡寒竹 | 一种腹腔镜术中胆道镜引导器 |
| JP6895660B2 (ja) * | 2017-05-08 | 2021-06-30 | 国立大学法人東京工業大学 | アクチュエータおよび移動体 |
| JP7076561B2 (ja) * | 2018-09-04 | 2022-05-27 | 富士フイルム株式会社 | オーバーチューブ |
| EP4171347A4 (en) * | 2020-05-22 | 2024-09-11 | Lumendi Ltd. | METHOD AND APPARATUS FOR MANIPULATING THE SIDE WALL OF A BODY LUMEN OR BODY CAVITY TO PROVIDE BETTER VISUALIZATION THEREOF, AND/OR BETTER ACCESS THERETO, AND/OR STABILIZATION OF INSTRUMENTS RELATIVE THERETO |
| US12569123B2 (en) | 2020-09-27 | 2026-03-10 | Boston Scientific Scimed, Inc. | Expandable guide devices, systems, and methods |
| EP4243910A4 (en) | 2020-11-16 | 2024-12-25 | Lumendi Ltd. | METHOD AND DEVICE FOR TURNING A HOLLOW SLEEVE AND SUBSEQUENT REVERSING AN INVERTED HOLLOW SLEEVE |
| WO2022208737A1 (ja) * | 2021-03-31 | 2022-10-06 | オリンパス株式会社 | 内視鏡用オーバーチューブ |
| US20220330799A1 (en) * | 2021-04-14 | 2022-10-20 | Arthrex, Inc | System and method for using detectable radiation in surgery |
| JP7529746B2 (ja) * | 2021-11-18 | 2024-08-06 | オリンパス株式会社 | 医療システム及び医療システムの制御方法 |
| US12061590B2 (en) | 2021-11-18 | 2024-08-13 | Olympus Corporation | Information processing system and processing method |
| US20240008720A1 (en) * | 2022-07-06 | 2024-01-11 | Gyrus Acmi, Inc. D/B/C Olympus Surgical Technologies America | Elongate endoscopic covering |
| WO2024227080A1 (en) * | 2023-04-26 | 2024-10-31 | Opus Medtech LLC | Systems, methods, and apparatuses for removing materials and plaque in arteries and blood vessels |
Family Cites Families (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5431825Y2 (ja) * | 1975-06-30 | 1979-10-04 | ||
| US4180076A (en) * | 1977-05-06 | 1979-12-25 | Betancourt Victor M | Nasogastric catheters |
| US4368739A (en) * | 1979-07-18 | 1983-01-18 | Nelson Jr Richard L | Long intestinal catheter |
| JPS5626104U (ja) * | 1979-08-08 | 1981-03-10 | ||
| JPS61284225A (ja) * | 1985-06-10 | 1986-12-15 | オリンパス光学工業株式会社 | 大腸用内視鏡の插入補助具 |
| JPS6222623A (ja) * | 1985-07-24 | 1987-01-30 | オリンパス光学工業株式会社 | 内視鏡用插入補助具 |
| US4731055A (en) * | 1986-08-25 | 1988-03-15 | Becton, Dickinson And Company | Blood flow conduit |
| DK0574378T3 (da) * | 1989-06-28 | 1996-03-11 | David S Zimmon | Ballon-tamponeringsanordning |
| SE465017B (sv) * | 1989-11-24 | 1991-07-15 | Lars Knutson | Anordning foer segmentell perfusion/aspiration av grovtarmen |
| US4983165A (en) * | 1990-01-23 | 1991-01-08 | Loiterman David A | Guidance system for vascular catheter or the like |
| US5400770A (en) * | 1992-01-15 | 1995-03-28 | Nakao; Naomi L. | Device utilizable with endoscope and related method |
| JP2911677B2 (ja) * | 1992-03-27 | 1999-06-23 | 川澄化学工業株式会社 | 気管内チューブ |
| JPH0663045A (ja) * | 1992-08-20 | 1994-03-08 | Olympus Optical Co Ltd | 超音波内視鏡 |
| JP3088240B2 (ja) * | 1994-04-12 | 2000-09-18 | 富士写真光機株式会社 | 径可変の内視鏡 |
| JP3631265B2 (ja) * | 1994-04-27 | 2005-03-23 | オリンパス株式会社 | 体内観察装置 |
| DE9413272U1 (de) * | 1994-08-17 | 1995-12-21 | Roewer, Norbert, Dr., 22529 Hamburg | Magensonde |
| JP3764500B2 (ja) * | 1994-11-25 | 2006-04-05 | オリンパス株式会社 | 内視鏡用流体制御システム |
| US5707355A (en) * | 1995-11-15 | 1998-01-13 | Zimmon Science Corporation | Apparatus and method for the treatment of esophageal varices and mucosal neoplasms |
| US20010020150A1 (en) * | 1998-02-06 | 2001-09-06 | Biagio Ravo | Inflatable intraluminal molding device |
| US6234958B1 (en) * | 1998-11-30 | 2001-05-22 | Medical Access Systems, Llc | Medical device introduction system including medical introducer having a plurality of access ports and methods of performing medical procedures with same |
| JP2001190518A (ja) * | 2000-01-17 | 2001-07-17 | Olympus Optical Co Ltd | 磁気共鳴観測装置 |
| JP2001238888A (ja) * | 2000-03-01 | 2001-09-04 | Heart Life:Kk | 医療器具 |
| AU2001249308A1 (en) * | 2000-03-24 | 2001-10-15 | Johns Hopkins University | Peritoneal cavity device and method |
| US6585639B1 (en) * | 2000-10-27 | 2003-07-01 | Pulmonx | Sheath and method for reconfiguring lung viewing scope |
| US6461294B1 (en) * | 2000-10-30 | 2002-10-08 | Vision Sciences, Inc. | Inflatable member for an endoscope sheath |
| JP2002282268A (ja) * | 2001-03-27 | 2002-10-02 | Sumitomo Bakelite Co Ltd | 挿入用外套管 |
| JPWO2003022346A1 (ja) * | 2001-09-07 | 2004-12-24 | 株式会社塚田メディカル・リサーチ | 前立腺肥大症治療用カテーテル |
| JP4780543B2 (ja) * | 2001-09-19 | 2011-09-28 | Hoya株式会社 | 内視鏡用バルーン装置 |
| JP4081259B2 (ja) * | 2001-10-30 | 2008-04-23 | オリンパス株式会社 | 内視鏡装置及び内視鏡離脱方法 |
| JP2003230629A (ja) * | 2002-02-07 | 2003-08-19 | Nikkiso Co Ltd | カテーテル |
| US6988987B2 (en) * | 2002-03-18 | 2006-01-24 | Olympus Corporation | Guide tube |
| JP2004305593A (ja) * | 2003-04-09 | 2004-11-04 | Olympus Corp | 内視鏡用挿入補助具 |
| JP3888359B2 (ja) * | 2003-05-15 | 2007-02-28 | 有限会社エスアールジェイ | 内視鏡装置 |
| US20050159645A1 (en) * | 2003-11-12 | 2005-07-21 | Bertolero Arthur A. | Balloon catheter sheath |
| US7135034B2 (en) * | 2003-11-14 | 2006-11-14 | Lumerx, Inc. | Flexible array |
| JP3873968B2 (ja) * | 2003-12-15 | 2007-01-31 | 有限会社エスアールジェイ | 内視鏡装置のオーバーチューブ |
| US7635345B2 (en) * | 2004-01-09 | 2009-12-22 | G. I. View Ltd. | Pressure-propelled system for body lumen |
| JP4994849B2 (ja) * | 2004-02-09 | 2012-08-08 | スマート・メディカル・システムズ・リミテッド | 内視鏡アセンブリ |
| JP4856067B2 (ja) * | 2004-07-09 | 2012-01-18 | ジーアイ・ダイナミックス・インコーポレーテッド | 胃腸内スリーブを配置するための方法および装置 |
| JP4642424B2 (ja) * | 2004-10-08 | 2011-03-02 | オリンパス株式会社 | 体内医療装置 |
| JP4149987B2 (ja) * | 2004-11-09 | 2008-09-17 | フジノン株式会社 | 内視鏡装置 |
| US7918787B2 (en) * | 2005-02-02 | 2011-04-05 | Voyage Medical, Inc. | Tissue visualization and manipulation systems |
| US20070015965A1 (en) * | 2005-07-13 | 2007-01-18 | Usgi Medical Inc. | Methods and apparatus for colonic cleaning |
| US8430809B2 (en) * | 2005-08-01 | 2013-04-30 | G. I View Ltd. | Capsule for use in small intestine |
| US9427142B2 (en) * | 2005-08-08 | 2016-08-30 | Smart Medical Systems Ltd | Balloon guided endoscopy |
-
2007
- 2007-04-04 US US11/732,660 patent/US20080249358A1/en not_active Abandoned
-
2008
- 2008-04-03 JP JP2008097380A patent/JP4995136B2/ja not_active Expired - Fee Related
- 2008-04-04 EP EP08006881A patent/EP1977679B1/en not_active Not-in-force
- 2008-04-04 DE DE602008002169T patent/DE602008002169D1/de active Active
-
2011
- 2011-08-01 JP JP2011168307A patent/JP5048858B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP4995136B2 (ja) | 2012-08-08 |
| EP1977679A1 (en) | 2008-10-08 |
| JP2011240152A (ja) | 2011-12-01 |
| US20080249358A1 (en) | 2008-10-09 |
| DE602008002169D1 (de) | 2010-09-30 |
| JP2008253780A (ja) | 2008-10-23 |
| EP1977679B1 (en) | 2010-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5048858B2 (ja) | オーバーチューブ及び処置システム | |
| US11737901B2 (en) | Method for performing a gastrectomy | |
| JP5647780B2 (ja) | 処置用オーバーチューブ及び処置システム | |
| AU2015217259B2 (en) | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same | |
| US20120123463A1 (en) | Mechanically-guided transoral bougie | |
| US20130116549A1 (en) | Anchored Working Channel | |
| US20120178994A1 (en) | Apparatus and method for assisting in the delivery of medical instruments into body organs | |
| US8870817B2 (en) | Methods of using an adjustable variable stiffness medical device | |
| KR20130109111A (ko) | 카테터 튜브를 배치하기 위한 다중 풍선 확장 장치 | |
| US10603465B2 (en) | Illuminated gastric tubes and methods of use | |
| JP6432019B2 (ja) | 処置具挿入補助具 | |
| ES2374591T3 (es) | Retractor médico y ensamblaje estabilizador. | |
| JP2010035951A (ja) | カテーテル | |
| JP2017000222A (ja) | 内視鏡システム | |
| US20210282626A1 (en) | Method and apparatus for manipulating the side wall of a body lumen or body cavity so as to provide increased visualization of the same and/or increased access to the same, and/or for stabilizing instruments relative to the same | |
| JP4499479B2 (ja) | 内視鏡用オーバーチューブおよび小腸内視鏡システム | |
| JP5431166B2 (ja) | 特に非侵襲性手術向けの保護手段 | |
| US20220096094A1 (en) | Expandable guide devices, systems, and methods | |
| JP7516533B2 (ja) | 器具用付属品 | |
| US20090287049A1 (en) | Access Systems Including Collapsible Port Body For Intra-Abdominal Surgery | |
| BRPI0916800A2 (pt) | overtube endoscópico flexível transluminal articulável e direcionável | |
| CN119586962A (zh) | 一种消化道内镜 | |
| JP6650310B2 (ja) | 挿入機器 | |
| CN119604223A (zh) | 用于操纵身体管腔的侧壁的方法和设备 | |
| WO2014014659A1 (en) | Percutaneous endoscopic therapy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120424 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20120531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120619 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120719 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150727 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5048858 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |