JP5036259B2 - 除振装置、露光装置及びデバイス製造方法 - Google Patents
除振装置、露光装置及びデバイス製造方法 Download PDFInfo
- Publication number
- JP5036259B2 JP5036259B2 JP2006249957A JP2006249957A JP5036259B2 JP 5036259 B2 JP5036259 B2 JP 5036259B2 JP 2006249957 A JP2006249957 A JP 2006249957A JP 2006249957 A JP2006249957 A JP 2006249957A JP 5036259 B2 JP5036259 B2 JP 5036259B2
- Authority
- JP
- Japan
- Prior art keywords
- reference object
- lorentz force
- surface plate
- vibration
- axis direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004519 manufacturing process Methods 0.000 title description 10
- 238000002955 isolation Methods 0.000 claims description 31
- 238000005259 measurement Methods 0.000 claims description 25
- 239000000758 substrate Substances 0.000 claims description 12
- 230000003287 optical effect Effects 0.000 claims description 11
- 230000005484 gravity Effects 0.000 claims description 10
- 238000006073 displacement reaction Methods 0.000 description 32
- 238000000034 method Methods 0.000 description 20
- 239000004065 semiconductor Substances 0.000 description 10
- 238000012937 correction Methods 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000013016 damping Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000001444 catalytic combustion detection Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005538 encapsulation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005468 ion implantation Methods 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 238000012858 packaging process Methods 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 230000004304 visual acuity Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70858—Environment aspects, e.g. pressure of beam-path gas, temperature
- G03F7/709—Vibration, e.g. vibration detection, compensation, suppression or isolation
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B27/00—Photographic printing apparatus
- G03B27/32—Projection printing apparatus, e.g. enlarger, copying camera
- G03B27/52—Details
- G03B27/53—Automatic registration or positioning of originals with respect to each other or the photosensitive layer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70808—Construction details, e.g. housing, load-lock, seals or windows for passing light in or out of apparatus
- G03F7/70833—Mounting of optical systems, e.g. mounting of illumination system, projection system or stage systems on base-plate or ground
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
Landscapes
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Epidemiology (AREA)
- Public Health (AREA)
- Environmental & Geological Engineering (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Toxicology (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Vibration Prevention Devices (AREA)
Description
実施形態1では、ローレンツ力アクチュエータ23を用いて基準物体21を一定の力で支持する。そして、一定の力で支持された基準物体21に対して基板ステージの定盤2を位置フィードバック制御することで、低周波成分の除振性能に優れた除振装置を提供する。この実施形態では、基板ステージの定盤2が除振対象物体である。
実施形態1と実施形態2の違いは、ローレンツ力アクチュエータ23が、床1に取り付けられているか、或いは定盤2に取り付けられているかである。本発明の特徴は、基準物体21をローレンツ力アクチュエータ23により一定の力で支持するところにあるので、ローレンツ力アクチュエータ23が床1、定盤2、又はその他の部材に取り付けられていても構わない。実施形態2では、ローレンツ力アクチュエータ23は基板ステージの定盤2上に設けられる。
実施形態3では、6個のローレンツ力アクチュエータを用いて、基準物体21を支持している。ローレンツ力アクチュエータ23x1,23x2は、基準物体21をX軸方向及びZ軸周りへの駆動する力を発生する。ローレンツ力アクチュエータ23y1は、基準物体21をY軸方向へ駆動する力を発生する。ローレンツ力アクチュエータ23z1,23z2,23z3は、基準物体21をZ軸方向へ駆動する力を発生する。
実施形態4では、実施形態3のローレンツ力アクチュエータ23x1、23x2、23y1を省略している。その代わりに、基準物体21aがX軸方向、Y軸方向、及びZ軸周りへ運動しないように、基準物体21aの運動を拘束するためのガイド30x1、30x2、30y1、30y2を設けている。
実施形態5は、実施形態4の基準物体21aのX軸方向、Y軸方向、Z軸周りの運動をガイドで拘束する代わりに、非接触計測器50とアクチュエータ51を用いて、位置フィードバック制御系している。基準物体21aの位置フィードバック制御系について次に述べる。
図7に示される実施形態6は、基準物体21に加わる重力と釣り合う力を基準物体21に与えるように、気体の圧力を一定に保っている。これにより基準物体21を基準物体21の位置によらず一定の力で支持することができる。
実施形態例7は、基準物体21に速度変化が発生した場合に、速度変化を抑えるための速度フィードバック制御系をローレンツ力アクチュエータ23に設けている。次に基準物体21の速度フィードバック制御系について説明する。
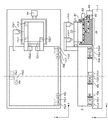
実施形態8は、図9に示すように、本発明の除振装置を露光装置の鏡筒定盤に適用した例を示している。この実施形態では鏡筒定盤が除振対象物体である。露光装置100は、ステップアンドスキャン方式により基板の露光(パターン転写)を行う投影露光装置として構成されている。露光装置100は、原版としてのレチクルRからの露光光を基板としてのウエハW上に垂直に投射する投影光学系POを有する。この露光光には、レチクルRに形成されたパターン情報が含まれる。
次に、図11及び図12を参照して、上述の露光装置を利用したデバイス製造方法の実施形態を説明する。図11は、デバイス(ICやLSIなどの半導体チップ、LCD、CCD等)の製造を説明するためのフローチャートである。ここでは、半導体チップの製造方法を例に説明する。
2 定盤(鏡筒定盤)
3 原版ステージ定盤
4 基板ステージ定盤
10 パッシブダンパ
11 アクチュエータ
12,29 非接触計測器
13 計測情報
14 補償器
15 指令値
20 気体の圧力で支持するアクチュエータ
21 基準物体
22 計測ミラー
23 ローレンツ力アクチュエータ
24 ヨーク(磁石含む)
25 コイル
26 電源装置
27 シール部材
28 位置補正センサ
30,41 ガイド
Claims (6)
- 除振対象物体と、
基準物体と、
前記基準物体をローレンツ力によって支持するローレンツ力アクチュエータと、
前記基準物体の位置によらない一定の電流をローレンツ力アクチュエータに供給することによって、前記基準物体に働く重力と釣り合う一定のローレンツ力を発生させる電源装置と、
前記基準物体に対する前記除振対象物体の位置を計測する第1計測器と、
前記第1計測器による計測結果に基づいて、前記基準物体に対する前記除振対象物体の位置を一定にするように前記除振対象物体に駆動力を作用させる駆動機構と、
を備えること特徴とする除振装置。 - 前記基準物体の速度を計測する第2計測器をさらに備え、
前記ローレンツ力アクチュエータは、前記第2計測器によって前記基準物体の速度の変化が検出されたならば前記基準物体に前記速度の変化を減少させる力を付与することを特徴とする請求項1に記載の除振装置。 - 前記第2計測器は、床に対する前記基準物体の速度を計測することを特徴とする請求項2に記載の除振装置。
- 前記基準物体の少なくとも1軸がエアガイド又は電磁ガイドにより拘束されていることを特徴とする請求項1乃至請求項3のいずれか1項に記載の除振装置。
- 原版ステージ、投影光学系の鏡筒及び基板ステージを備える露光装置であって、
請求項1乃至請求項4のいずれか1項に記載の除振装置を備え、
前記除振装置は、前記原版ステージ、前記投影光学系の鏡筒及び前記基板ステージのいずれか一つを前記除振対象物体で支持するように構成されていることを特徴とする露光装置。 - 請求項5に記載される露光装置を用いて基板を露光する工程と、
前記基板を現像する工程とを備えることを特徴とするデバイス製造方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006249957A JP5036259B2 (ja) | 2006-09-14 | 2006-09-14 | 除振装置、露光装置及びデバイス製造方法 |
| TW096130966A TW200817844A (en) | 2006-09-14 | 2007-08-21 | Anti-vibration apparatus, exposure apparatus, and device manufacturing method |
| US11/846,904 US20080068603A1 (en) | 2006-09-14 | 2007-08-29 | Anti-vibration apparatus, exposure apparatus, and device manufacturing method |
| KR1020070091892A KR100873407B1 (ko) | 2006-09-14 | 2007-09-11 | 제진장치, 노광장치 및 디바이스 제조방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006249957A JP5036259B2 (ja) | 2006-09-14 | 2006-09-14 | 除振装置、露光装置及びデバイス製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008069890A JP2008069890A (ja) | 2008-03-27 |
| JP2008069890A5 JP2008069890A5 (ja) | 2009-11-05 |
| JP5036259B2 true JP5036259B2 (ja) | 2012-09-26 |
Family
ID=39188219
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006249957A Expired - Fee Related JP5036259B2 (ja) | 2006-09-14 | 2006-09-14 | 除振装置、露光装置及びデバイス製造方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20080068603A1 (ja) |
| JP (1) | JP5036259B2 (ja) |
| KR (1) | KR100873407B1 (ja) |
| TW (1) | TW200817844A (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008047562B4 (de) * | 2008-09-16 | 2012-11-08 | Carl Zeiss Smt Gmbh | Vorrichtung zur Dämpfung von Schwingungen in Projektionsbelichtungsanlagen für die Halbleiterlithographie |
| JP5641878B2 (ja) * | 2010-10-29 | 2014-12-17 | キヤノン株式会社 | 振動制御装置、リソグラフィー装置、および、物品の製造方法 |
| US9435642B2 (en) * | 2012-04-20 | 2016-09-06 | Canon Kabushiki Kaisha | Position measuring apparatus, pattern transfer apparatus, and method for manufacturing a device |
| JP6278676B2 (ja) * | 2013-11-29 | 2018-02-14 | キヤノン株式会社 | 振動低減装置、リソグラフィ装置、および物品の製造方法 |
| JP6302305B2 (ja) * | 2014-03-18 | 2018-03-28 | キヤノン株式会社 | 振動低減装置、リソグラフィ装置、および物品の製造方法 |
| US10161956B2 (en) | 2016-04-25 | 2018-12-25 | Honeywell International Inc. | Reducing bias in an accelerometer via a pole piece |
| CN117146764B (zh) * | 2023-10-27 | 2024-01-05 | 江苏优创红外科技有限公司 | 一种光学镜片表面平整度检测设备 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4855977A (en) * | 1987-07-27 | 1989-08-08 | Laser Magnetic Storage International Company | Track seeking apparatus and method using sampled information |
| US5812420A (en) | 1995-09-05 | 1998-09-22 | Nikon Corporation | Vibration-preventive apparatus and exposure apparatus |
| KR100473230B1 (ko) | 1996-04-05 | 2005-07-01 | 가부시키가이샤 니콘 | 제진장치및노광장치 |
| JP3659529B2 (ja) * | 1996-06-06 | 2005-06-15 | キヤノン株式会社 | 露光装置およびデバイス製造方法 |
| JPH09330975A (ja) * | 1996-06-11 | 1997-12-22 | Nikon Corp | 搬送装置 |
| JP3635600B2 (ja) * | 1996-08-29 | 2005-04-06 | キヤノン株式会社 | 送り装置 |
| US6028376A (en) * | 1997-04-22 | 2000-02-22 | Canon Kabushiki Kaisha | Positioning apparatus and exposure apparatus using the same |
| JPH11189332A (ja) * | 1997-12-26 | 1999-07-13 | Canon Inc | ステージ装置およびこれを用いた露光装置ならびにデバイス製造方法 |
| US6130517A (en) * | 1998-02-12 | 2000-10-10 | Nikon Corporation | Magnetic actuator producing large acceleration on fine stage and low RMS power gain |
| JP4146952B2 (ja) * | 1999-01-11 | 2008-09-10 | キヤノン株式会社 | 露光装置およびデバイス製造方法 |
| JP2002048184A (ja) * | 2000-08-04 | 2002-02-15 | Japan Aviation Electronics Industry Ltd | 制振装置 |
| KR20010078975A (ko) * | 2001-05-28 | 2001-08-22 | 윤중인 | 하나로 펜 (화이트와 볼펜을 하나로 통합된 다용도 펜) |
| JP3919560B2 (ja) * | 2002-02-26 | 2007-05-30 | キヤノン株式会社 | 振動制御装置及び振動制御方法及び露光装置及びデバイスの製造方法 |
| US6906789B2 (en) * | 2003-06-02 | 2005-06-14 | Asml Holding N.V. | Magnetically levitated and driven reticle-masking blade stage mechanism having six degrees freedom of motion |
| US7084956B2 (en) * | 2003-06-13 | 2006-08-01 | Asml Netherlands B.V | Supporting device, lithographic apparatus, and device manufacturing method employing a supporting device, and a position control system arranged for use in a supporting device |
| JP4590846B2 (ja) * | 2003-09-01 | 2010-12-01 | 株式会社ニコン | 磁気浮上式ステージ装置及び露光装置 |
| DE602004030259D1 (de) * | 2003-09-05 | 2011-01-05 | Koninkl Philips Electronics Nv | Stellgliedanordnung für aktive schwingungsisolierung mit einer trägheitsbezugsmasse |
-
2006
- 2006-09-14 JP JP2006249957A patent/JP5036259B2/ja not_active Expired - Fee Related
-
2007
- 2007-08-21 TW TW096130966A patent/TW200817844A/zh unknown
- 2007-08-29 US US11/846,904 patent/US20080068603A1/en not_active Abandoned
- 2007-09-11 KR KR1020070091892A patent/KR100873407B1/ko not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| US20080068603A1 (en) | 2008-03-20 |
| KR20080024979A (ko) | 2008-03-19 |
| TW200817844A (en) | 2008-04-16 |
| KR100873407B1 (ko) | 2008-12-11 |
| JP2008069890A (ja) | 2008-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7443619B2 (en) | Optical element holding apparatus, exposure apparatus and device manufacturing method | |
| EP2053461B1 (en) | Lithographic apparatus having a damping subassembly. | |
| US10649347B2 (en) | Lithographic apparatus and device manufacturing method | |
| TWI664503B (zh) | 承載裝置、磁重力補償器、振動隔離系統、微影設備、控制具有負剛性的重力補償器的方法及彈簧 | |
| JP5238678B2 (ja) | オブジェクトを制動させるための方法、アクティブダンピングシステムおよびリソグラフィ装置 | |
| US20070097340A1 (en) | Active damper with counter mass to compensate for structural vibrations of a lithographic system | |
| JP5036259B2 (ja) | 除振装置、露光装置及びデバイス製造方法 | |
| US7084956B2 (en) | Supporting device, lithographic apparatus, and device manufacturing method employing a supporting device, and a position control system arranged for use in a supporting device | |
| JP4824054B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| US6590639B1 (en) | Active vibration isolation system having pressure control | |
| US7817243B2 (en) | Vibration isolation system | |
| US10409175B2 (en) | Lithographic apparatus and device manufacturing method | |
| JP2006261605A (ja) | 露光装置及び露光方法 | |
| US7876419B2 (en) | Exposure apparatus and device manufacturing method | |
| US20030169412A1 (en) | Reaction frame for a wafer scanning stage with electromagnetic connections to ground | |
| EP1486825A1 (en) | Supporting device, lithographic projection apparatus and device manufacturing method using a supporting device and a position control system arranged for use in a supporting device | |
| US10578983B2 (en) | Lithographic apparatus having an active base frame support | |
| US8619361B2 (en) | Direct derivative feedforward vibration compensation system | |
| US20070115451A1 (en) | Lithographic System with Separated Isolation Structures | |
| JP2009168122A (ja) | 除振装置、露光装置およびデバイス製造方法 | |
| US10866529B2 (en) | Lithographic apparatus and device manufacturing method | |
| JP2004228428A (ja) | ステージ制御装置、露光装置、及びデバイス製造方法 | |
| WO2016034348A1 (en) | A vibration isolation system to support a structure, a lithographic apparatus and device manufacturing method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090914 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120702 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120703 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150713 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |