JP5032768B2 - 磁気ヘッドの制御装置,磁気ヘッドの制御方法,及び記録媒体 - Google Patents
磁気ヘッドの制御装置,磁気ヘッドの制御方法,及び記録媒体 Download PDFInfo
- Publication number
- JP5032768B2 JP5032768B2 JP2005376053A JP2005376053A JP5032768B2 JP 5032768 B2 JP5032768 B2 JP 5032768B2 JP 2005376053 A JP2005376053 A JP 2005376053A JP 2005376053 A JP2005376053 A JP 2005376053A JP 5032768 B2 JP5032768 B2 JP 5032768B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic head
- heater
- disk
- mode
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 33
- 230000008859 change Effects 0.000 claims description 35
- 238000012360 testing method Methods 0.000 claims description 21
- 101100259716 Arabidopsis thaliana TAA1 gene Proteins 0.000 claims description 16
- 101100259832 Oryza sativa subsp. japonica TAR2 gene Proteins 0.000 claims description 16
- 230000008569 process Effects 0.000 claims description 12
- 238000013500 data storage Methods 0.000 claims description 9
- 238000010438 heat treatment Methods 0.000 claims description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052755 nonmetal Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B21/00—Head arrangements not specific to the method of recording or reproducing
- G11B21/16—Supporting the heads; Supporting the sockets for plug-in heads
- G11B21/20—Supporting the heads; Supporting the sockets for plug-in heads while the head is in operative position but stationary or permitting minor movements to follow irregularities in surface of record carrier
- G11B21/21—Supporting the heads; Supporting the sockets for plug-in heads while the head is in operative position but stationary or permitting minor movements to follow irregularities in surface of record carrier with provision for maintaining desired spacing of head from record carrier, e.g. fluid-dynamic spacing, slider
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/60—Fluid-dynamic spacing of heads from record-carriers
- G11B5/6005—Specially adapted for spacing from a rotating disc using a fluid cushion
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/40—Protective measures on heads, e.g. against excessive temperature
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/60—Fluid-dynamic spacing of heads from record-carriers
- G11B5/6005—Specially adapted for spacing from a rotating disc using a fluid cushion
- G11B5/6011—Control of flying height
- G11B5/6064—Control of flying height using air pressure
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B5/00—Recording by magnetisation or demagnetisation of a record carrier; Reproducing by magnetic means; Record carriers therefor
- G11B5/48—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed
- G11B5/58—Disposition or mounting of heads or head supports relative to record carriers ; arrangements of heads, e.g. for scanning the record carrier to increase the relative speed with provision for moving the head for the purpose of maintaining alignment of the head relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B5/60—Fluid-dynamic spacing of heads from record-carriers
- G11B5/6005—Specially adapted for spacing from a rotating disc using a fluid cushion
- G11B5/6011—Control of flying height
- G11B5/607—Control of flying height using thermal means
Landscapes
- Adjustment Of The Magnetic Head Position Track Following On Tapes (AREA)
- Digital Magnetic Recording (AREA)
- Magnetic Heads (AREA)
Description
ここで,Δd=ディスクと磁気ヘッドとの磁気空間の変化量,λ=記録波長=線速度/記録周波数,Ls=Ln(TAA1/TAA2)であり,TAA1は以前のAGC利得値であり,TAA2は現在のAGC利得値である。
16 磁気ヘッド
26 ボイスコイル
210 プリアンプ
220 書き込み/読み取りチャンネル
230 バッファ
240 コントローラ
250A ROM
250B RAM
260 ホストインターフェース
270 VCM駆動部
280 ヒータ電流供給回路
Claims (5)
- データ記憶装置の磁気ヘッド制御装置において,
情報を記憶するディスクと,
前記ディスク上の磁界を感知する磁気読み取り素子及び前記ディスクを磁化させる磁気書き込み素子を備え,前記ディスクの表面,前記磁気読み取り素子及び前記磁気書き込み素子の間に空気軸受表面を生成させる構造を有し,前記空気軸受表面を生成させる構造物を加熱させるヒータを備える磁気ヘッドと,
書き込みモード及び読み取りモードでそれぞれ決定された電流を前記ヒータに印加する電流供給回路と,
を備え,
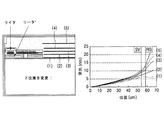
前記ヒータの消費電力の変化に対する前記ディスクと前記磁気ヘッドとの間隔のグラフであって,前記書き込みモード及び前記読み取りモードでそれぞれ算出された前記グラフに基づいて,前記書き込みモード及び前記読み取りモードにおいて前記ディスクと前記磁気ヘッドとの間隔が同一となるように前記ヒータに印加される電流値が決定され,
前記グラフは、
所定のテストトラックで線速度及び記録周波数を検出し、
前記テストトラックでデータ読み取りモード又はデータ書き込みモードを実行し、
前記磁気ヘッドと前記ディスクとが接触されるまで,前記ヒータに印加される電流を所定単位で増加させつつ再生される信号に対する自動利得制御回路の利得値を検出し、
前記ヒータの消費電力の変化に対する前記ディスクと前記磁気ヘッドとの間隔の前記グラフを次の数式に基づいて算出する
Δd=(λ/2π)×Ls
(ここで,Δd=ディスクと磁気ヘッドとの磁気空間の変化量,λ=記録波長=線速度/記録周波数,Ls=Ln(TAA1/TAA2)であり,TAA1は以前のAGC利得値であり,TAA2は現在のAGC利得値である)
ことにより算出される、
ことを特徴とする磁気ヘッド制御装置。 - 前記ヒータは,コイルを備えることを特徴とする,請求項1に記載の磁気ヘッド制御装置。
- ヒータが内蔵された磁気ヘッドと前記ヒータに電流を印加する電流供給回路とを備えるデータ記憶装置の磁気ヘッド制御方法において,
書き込みモード及び読み取りモードでそれぞれ前記ヒータに印加される電流を可変させつつ,前記ヒータの消費電力の変化に対するディスクと前記磁気ヘッドとの間隔のグラフを算出するステップと,
前記グラフに基づいて,書き込みモード及び読み取りモードにおいて前記ディスクと前記磁気ヘッドとの間隔が同一となるように前記ヒータに印加される電流値をそれぞれ決定するステップと,
前記書き込みモードについて決定された電流値を前記書き込みモードにおいて前記ヒータに印加するステップと,
前記読み取りモードについて決定された電流値を前記読み取りモードにおいて前記ヒータに印加するステップと,
を含み、
前記読み取りモード及び読み取りモードでそれぞれ,前記ヒータの消費電力の変化に対する前記ディスクと前記磁気ヘッドとの間隔の前記グラフを算出する前記ステップは,
所定のテストトラックで線速度及び記録周波数を検出するステップと,
前記テストトラックでデータ読み取りモード又はデータ書き込みモードを実行するステップと,
前記磁気ヘッドと前記ディスクとが接触されるまで,前記ヒータに印加される電流を所定単位で増加させつつ再生される信号に対する自動利得制御回路の利得値を検出するステップと,
前記ヒータの消費電力の変化に対する前記ディスクと前記磁気ヘッドとの間隔の前記グラフを次の数式に基づいて算出するステップと,
Δd=(λ/2π)×Ls
(ここで,Δd=ディスクと磁気ヘッドとの磁気空間の変化量,λ=記録波長=線速度/記録周波数,Ls=Ln(TAA1/TAA2)であり,TAA1は以前のAGC利得値であり,TAA2は現在のAGC利得値である)
を含む、
ことを特徴とする,磁気ヘッド制御方法。 - 位置エラー信号が検出され,前記位置エラー信号のレベルが所定の臨界値を超えれば,前記磁気ヘッドが前記ディスクに接触されると判定することを特徴とする,請求項3に記載の磁気ヘッド制御方法。
- ヒータが内蔵された磁気ヘッドと前記ヒータに電流を印加する電流供給回路とを備えるデータ記憶装置の磁気ヘッド制御方法を実行させるための,コンピュータで読み取り可能なコードを含む記録媒体において,
書き込みモード及び読み取りモードでそれぞれ前記ヒータに印加される電流を可変させつつ,前記ヒータの消費電力の変化に対するディスクと前記磁気ヘッドとの間隔のグラフを算出するプロセスと,
前記グラフに基づいて,書き込みモード及び読み取りモードにおいて前記ディスクと前記磁気ヘッドとの間隔が同一となるように前記ヒータに印加される電流値をそれぞれ決定するプロセスと,
前記書き込みモードについて決定された電流値を前記書き込みモードにおいて前記ヒータに印加させるプロセスと,
前記読み取りモードについて決定された電流値を前記読み取りモードにおいて前記ヒータに印加させるプロセスと,
を前記コンピュータに実行させ、
前記グラフを算出するプロセスは、
所定のテストトラックで線速度及び記録周波数を検出するプロセスと,
前記テストトラックでデータ読み取りモード又はデータ書き込みモードを実行するプロセスと,
前記磁気ヘッドと前記ディスクとが接触されるまで,前記ヒータに印加される電流を所定単位で増加させつつ再生される信号に対する自動利得制御回路の利得値を検出するプロセスと,
前記ヒータの消費電力の変化に対する前記ディスクと前記磁気ヘッドとの間隔の前記グラフを次の数式に基づいて算出するプロセスと,
Δd=(λ/2π)×Ls
(ここで,Δd=ディスクと磁気ヘッドとの磁気空間の変化量,λ=記録波長=線速度/記録周波数,Ls=Ln(TAA1/TAA2)であり,TAA1は以前のAGC利得値であり,TAA2は現在のAGC利得値である)
を含む、
ことを特徴とする,記録媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2004-0113692 | 2004-12-28 | ||
| KR1020040113692A KR100640621B1 (ko) | 2004-12-28 | 2004-12-28 | 디스크 드라이브의 자기 헤드 비행 높이 조정 장치 및 방법 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006190454A JP2006190454A (ja) | 2006-07-20 |
| JP2006190454A5 JP2006190454A5 (ja) | 2009-01-29 |
| JP5032768B2 true JP5032768B2 (ja) | 2012-09-26 |
Family
ID=36096155
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005376053A Expired - Fee Related JP5032768B2 (ja) | 2004-12-28 | 2005-12-27 | 磁気ヘッドの制御装置,磁気ヘッドの制御方法,及び記録媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7649706B2 (ja) |
| EP (1) | EP1677290B1 (ja) |
| JP (1) | JP5032768B2 (ja) |
| KR (1) | KR100640621B1 (ja) |
| DE (1) | DE602005014077D1 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7180692B1 (en) * | 2005-12-27 | 2007-02-20 | Hitachi Global Storage Technologies Netherlands B.V. | System and method for calibrating and controlling a fly-height actuator in a magnetic recording disk drive |
| US7423829B2 (en) * | 2006-03-22 | 2008-09-09 | Samsung Electronics Co., Ltd. | Circuit for flying height on demand |
| JP4439483B2 (ja) | 2006-03-28 | 2010-03-24 | 東芝ストレージデバイス株式会社 | 記憶装置、制御装置、制御方法及びプログラム |
| JP4379814B2 (ja) * | 2006-03-28 | 2009-12-09 | 富士通株式会社 | 記憶装置、制御方法、制御装置及びプログラム |
| US7633696B2 (en) * | 2006-03-29 | 2009-12-15 | Seagate Technology Llc | Fly height calibration for read/write heads |
| US20070230021A1 (en) * | 2006-03-29 | 2007-10-04 | Maxtor Corporation | Flying height control for read-to-write and write-to-read transitions |
| KR100761841B1 (ko) * | 2006-04-04 | 2007-09-28 | 삼성전자주식회사 | 리트라이 모드에서의 자기 헤드의 비행 높이 제어 장치 및방법과 이를 이용한 디스크 드라이브 |
| US7423830B2 (en) * | 2006-04-10 | 2008-09-09 | Iomega Corporation | Detecting head/disk contact in a disk drive using a calibration parameter |
| JP2007310978A (ja) * | 2006-05-19 | 2007-11-29 | Fujitsu Ltd | ヘッド浮上量制御方法及び装置、記憶装置及びプログラム |
| JP2008041118A (ja) * | 2006-08-01 | 2008-02-21 | Denso Corp | 記憶装置及び車載ナビゲーションシステム |
| JP4908106B2 (ja) * | 2006-08-18 | 2012-04-04 | 東芝ストレージデバイス株式会社 | 記憶装置、制御方法、制御装置及びプログラム |
| JP4728929B2 (ja) * | 2006-10-31 | 2011-07-20 | 東芝ストレージデバイス株式会社 | 制御装置、制御方法及び記憶装置 |
| JP2008112544A (ja) * | 2006-10-31 | 2008-05-15 | Fujitsu Ltd | ヘッド制御装置、記憶装置、およびヘッド制御方法 |
| JP4675873B2 (ja) * | 2006-11-27 | 2011-04-27 | 東芝ストレージデバイス株式会社 | ヘッド制御装置、記憶装置、および上限パワー決定方法 |
| JP2008171520A (ja) * | 2007-01-15 | 2008-07-24 | Fujitsu Ltd | 制御装置、制御方法、及び記憶装置 |
| KR100855973B1 (ko) * | 2007-01-24 | 2008-09-02 | 삼성전자주식회사 | 자기 헤드 부상 높이를 조절하는 하드디스크 드라이브 및그 방법 |
| JP2008192187A (ja) * | 2007-01-31 | 2008-08-21 | Fujitsu Ltd | ヘッド制御装置、記憶装置および接触検出方法 |
| JP4795982B2 (ja) * | 2007-01-31 | 2011-10-19 | ヒタチグローバルストレージテクノロジーズネザーランドビーブイ | ディスク・ドライブ装置、その高度判定方法及びそのヘッド素子部の特性判定方法 |
| JP4805860B2 (ja) * | 2007-02-05 | 2011-11-02 | 東芝ストレージデバイス株式会社 | 浮上量測定装置、記憶装置および浮上量測定方法 |
| JP2008243288A (ja) * | 2007-03-27 | 2008-10-09 | Fujitsu Ltd | 磁気記憶装置、制御装置及び浮上量制御方法 |
| KR20080090011A (ko) | 2007-04-03 | 2008-10-08 | 삼성전자주식회사 | 저온에서 헤드의 불안정성을 개선한 하드디스크 드라이브및 그 방법 |
| JP2008310904A (ja) | 2007-06-15 | 2008-12-25 | Fujitsu Ltd | 制御装置、記憶装置、ヒータ設定値決定プログラムおよび記憶装置製造方法 |
| JP4840780B2 (ja) | 2007-06-19 | 2011-12-21 | 東芝ストレージデバイス株式会社 | 記憶装置のヘッドic及びそれを用いた記憶装置 |
| US7508617B1 (en) * | 2007-09-07 | 2009-03-24 | Seagate Technology Llc | Fly height compensation using read gain control loop |
| US7616398B2 (en) * | 2007-11-09 | 2009-11-10 | Hitachi Global Storage Technologies Netherlands B.V. | Fly height adjustment device calibration |
| JP4909878B2 (ja) * | 2007-11-30 | 2012-04-04 | ヒタチグローバルストレージテクノロジーズネザーランドビーブイ | ディスク・ドライブ装置及びそのクリアランス調整方法 |
| EP2065888A1 (en) | 2007-11-30 | 2009-06-03 | Hitachi Global Storage Technologies Netherlands B.V. | Disk drive device and clearence control method thereof |
| JP4854038B2 (ja) | 2008-03-26 | 2012-01-11 | 東芝ストレージデバイス株式会社 | 情報アクセス装置および浮上量制御方法 |
| JP2010033665A (ja) * | 2008-07-30 | 2010-02-12 | Toshiba Storage Device Corp | 磁気記憶装置及び磁気ヘッドの浮上量制御用の供給電力の制御方法 |
| US7990641B2 (en) * | 2008-08-06 | 2011-08-02 | Kabushiki Kaisha Toshiba | Proximity detection method for magnetic head and recording medium |
| JP5080411B2 (ja) * | 2008-09-19 | 2012-11-21 | エイチジーエスティーネザーランドビーブイ | ディスク・ドライブ及びヘッド・スライダ上の素子のコモン電位調整方法 |
| JP4836284B2 (ja) | 2008-09-30 | 2011-12-14 | 東芝ストレージデバイス株式会社 | 制御装置、制御方法、および情報記憶装置 |
| US20100157765A1 (en) * | 2008-12-19 | 2010-06-24 | Seagate Technology Llc | Collection of readback signal modulation data |
| KR101592195B1 (ko) * | 2010-03-26 | 2016-02-05 | 시게이트 테크놀로지 인터내셔날 | 센서를 이용한 터치-다운 및 헤드/미디어 접촉 검출 방법 및 장치와 이를 적용한 디스크 드라이브 및 저장매체 |
| US8730611B2 (en) | 2011-02-28 | 2014-05-20 | Seagate Technology Llc | Contact detection |
| JP5830890B2 (ja) | 2011-03-24 | 2015-12-09 | 富士電機株式会社 | 磁気ディスク装置、磁気ディスク及びその製造方法 |
| US8687313B2 (en) * | 2011-06-23 | 2014-04-01 | Western Digital Technologies, Inc. | Disk drive mapping out data tracks to avoid thermal asperities |
| US8982502B2 (en) * | 2011-12-12 | 2015-03-17 | HGST Netherlands B.V. | Hard disk drive with write assist based on detected conditions |
| US8995076B1 (en) * | 2014-04-21 | 2015-03-31 | Seagate Technology Llc | Head-medium contact detection using electromagnetic attraction |
| US9472225B2 (en) | 2015-02-11 | 2016-10-18 | Seagate Technology Llc | Heat-assisted magnetic recording head-disk clearance setting |
| US9548072B2 (en) | 2015-02-11 | 2017-01-17 | Seagate Technology Llc | Concurrent modulation and frictional heating head disk contact detection |
| US9990950B1 (en) | 2017-07-17 | 2018-06-05 | Seagate Technology Llc | Calibration and adjusting target pre-write clearance offset for a heat-assisted magnetic recording device |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4777544A (en) * | 1986-08-15 | 1988-10-11 | International Business Machine Corporation | Method and apparatus for in-situ measurement of head/recording medium clearance |
| US5959801A (en) * | 1997-10-22 | 1999-09-28 | International Business Machines Corporation | Stiction reduction in disk drives using heating |
| JP2000348456A (ja) | 1999-06-07 | 2000-12-15 | Minolta Co Ltd | 情報記録再生装置 |
| JPWO2002037480A1 (ja) * | 2000-10-26 | 2004-03-11 | 株式会社日立製作所 | 磁気ヘッドスライダ及び磁気ディスク装置 |
| US20020114108A1 (en) * | 2001-02-19 | 2002-08-22 | Seagate Technology Llc | Apparatus and method for passive adaptive flying height control in a disc drive |
| US6760182B2 (en) * | 2001-02-19 | 2004-07-06 | Seagate Technology Llc | Temperature compensated fly height control |
| JP3636133B2 (ja) * | 2001-11-29 | 2005-04-06 | Tdk株式会社 | 薄膜磁気ヘッド、該薄膜磁気ヘッドを備えたヘッドジンバルアセンブリ及び該ヘッドジンバルアセンブリを備えた磁気ディスク装置 |
| US20030111856A1 (en) * | 2001-12-13 | 2003-06-19 | Hewett Frank W. | Bundling, carrying and storing device |
| JP2003272335A (ja) * | 2002-03-13 | 2003-09-26 | Toshiba Corp | 磁気ディスク装置 |
| JP2003308670A (ja) * | 2002-04-12 | 2003-10-31 | Hitachi Ltd | 磁気ディスク装置 |
| US7089649B2 (en) * | 2002-09-26 | 2006-08-15 | Samsung Electronics Co. Ltd, | Method of estimating a thermal pole tip protrusion for a head gimbal assembly |
| JP4076434B2 (ja) * | 2002-12-12 | 2008-04-16 | 株式会社日立グローバルストレージテクノロジーズ | 磁気ヘッド及びヘッド・ジンバル・アセンブリ |
| KR100468779B1 (ko) | 2002-12-13 | 2005-01-29 | 삼성전자주식회사 | 자기 헤드의 tptp 특성 측정 방법 및 이에 적합한기록 전류 제어 방법 |
| US6972919B2 (en) * | 2003-09-05 | 2005-12-06 | Hitachi Global Storage Technologies Netherlands, B.V. | Increasing head-disk interface reliability using controlled heating |
| US6975472B2 (en) * | 2003-09-12 | 2005-12-13 | Seagate Technology Llc | Head with heating element and control regime therefor |
| US7061706B2 (en) * | 2004-03-15 | 2006-06-13 | Hitachi Global Storage Technologies Netherlands B.V. | Circuitry for linear control of head flying height using thermal means |
| US7400473B1 (en) * | 2004-07-13 | 2008-07-15 | Maxtor Corporation | Slider with independent fly-height adjustment of reader and writer |
| JP4413168B2 (ja) * | 2005-07-19 | 2010-02-10 | 東芝ストレージデバイス株式会社 | ヒータ制御方法及び記憶装置 |
-
2004
- 2004-12-28 KR KR1020040113692A patent/KR100640621B1/ko not_active IP Right Cessation
-
2005
- 2005-12-27 JP JP2005376053A patent/JP5032768B2/ja not_active Expired - Fee Related
- 2005-12-27 US US11/317,012 patent/US7649706B2/en active Active
- 2005-12-28 DE DE602005014077T patent/DE602005014077D1/de active Active
- 2005-12-28 EP EP05028607A patent/EP1677290B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP1677290A3 (en) | 2006-09-27 |
| KR100640621B1 (ko) | 2006-11-01 |
| EP1677290B1 (en) | 2009-04-22 |
| US7649706B2 (en) | 2010-01-19 |
| EP1677290A2 (en) | 2006-07-05 |
| DE602005014077D1 (de) | 2009-06-04 |
| JP2006190454A (ja) | 2006-07-20 |
| US20060139789A1 (en) | 2006-06-29 |
| KR20060075126A (ko) | 2006-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5032768B2 (ja) | 磁気ヘッドの制御装置,磁気ヘッドの制御方法,及び記録媒体 | |
| US7835104B2 (en) | Storage device, control method, control device, and program | |
| JP4728929B2 (ja) | 制御装置、制御方法及び記憶装置 | |
| US7426090B2 (en) | Storage device, control device, control method, and program | |
| JP5165445B2 (ja) | 適応的磁気ヘッド飛行高さ調整方法、この方法をコンピュータで実行させるためのプログラムを記録したコンピュータで読み取り可能な記録媒体及びこれを利用したディスクドライブ | |
| US8537488B2 (en) | Method for specifying control value for controlling clearance adjustment amount between head and disk, disk drive device and manufacturing method thereof | |
| JP2008171520A (ja) | 制御装置、制御方法、及び記憶装置 | |
| US7583467B2 (en) | Hard disk drive apparatus, method to control flying on demand of hard disk drive apparatus using thermal asperity signal, and recording media for computer program thereof | |
| JP4401693B2 (ja) | 温度によるデータ記憶システム制御方法,温度によるデータ記憶システム制御装置,およびデータ記憶システムでのウォーミングライト電流決定方法 | |
| JP2009157987A (ja) | ヘッド・スライダのリセス量を調整する方法及びディスク・ドライブ装置 | |
| US7852594B2 (en) | Device and method for specifying control value for controlling clearance between head and disk, and magnetic disk drive device | |
| JP4011049B2 (ja) | 磁気ヘッドの書込み特性の最適化方法,磁気ヘッドの定義方法,ドライブの作動方法,及びハードディスクドライブ | |
| JP4895560B2 (ja) | データ記憶装置 | |
| JP5052035B2 (ja) | ハードディスクドライブの記録強度の制御方法,記録媒体,及びハードディスクドライブ | |
| JP5080841B2 (ja) | リトライモードでの磁気ヘッドの飛行高さの制御装置、制御方法、記録媒体及びディスクドライブ | |
| CN111599384B (zh) | 磁盘装置以及磁盘装置的记录方法 | |
| EP1950741A2 (en) | Device for control of the flying height of magnetic head in a hard disk drive apparatus and a control method therefor | |
| KR20110000962A (ko) | 디스크 드라이브의 판독 또는 기록 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110620 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110620 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120531 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120608 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120626 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120629 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150706 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |