JP4905457B2 - レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 - Google Patents
レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 Download PDFInfo
- Publication number
- JP4905457B2 JP4905457B2 JP2008542029A JP2008542029A JP4905457B2 JP 4905457 B2 JP4905457 B2 JP 4905457B2 JP 2008542029 A JP2008542029 A JP 2008542029A JP 2008542029 A JP2008542029 A JP 2008542029A JP 4905457 B2 JP4905457 B2 JP 4905457B2
- Authority
- JP
- Japan
- Prior art keywords
- antenna elements
- target
- azimuth
- interval
- time interval
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/343—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using sawtooth modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/46—Indirect determination of position data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
また、検知領域内に複数の物標が存在する場合には、ビート周波数のスペクトルピークが複数になり、対応するスペクトル同士をペアリングする必要があるが、このペアリング処理では、ペアリングミスが発生することがある。そして、ペアリングミスが発生すると、相対速度を正確に算出できない。
演算式
V=d・(sinθ1−sinθ2)/(2・Δt)+n・λ/(2・Δt) −(1)
を用いて得られる候補の中から1つを選択して物標の相対速度を算出することを特徴としている。
Δt<λ/(2|Vmax−Vmin|) −(2)
となるように、第1の時間間隔と第2の時間間隔との差Δtを設定することを特徴としている。
d<λ/|sinθmax−sinθmin| −(3)
となるように、複数のアンテナ素子の配置間隔を設定することを特徴としている。
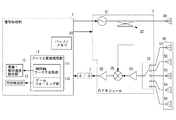
図1に示すように、本実施形態のレーダ装置は、送信信号制御、切り替え制御、物体検知を行う信号処理部1と、RFモジュール2と、送信アンテナ40と受信アンテナ50とを備える。
RFモジュール2の送信系として、VCO21は、所謂、電圧制御発振器からなり、信号処理部1からの送信制御信号を受けて三角波変調送信信号を生成し、分配器22に出力する。
ミキサ25は、RF信号とローカル信号とを乗算してIFビート信号を生成し、IFアンプ26に与える。IFアンプ26は、IFビート信号のゲイン制御を行い、A/Dコンバータ3に出力する。
本実施形態のレーダ装置は、次に示す原理に基づいて物標の相対速度を検知する。
図3〜図7は物標相対速度検知原理を説明するための図であり、図3は相対速度による物標までの距離の変化を示す。図3において、dはアンテナ素子の配置間隔を表し、r0はアンテナ素子51の受信信号を出力選択した時点での物標900とアンテナ素子51との距離を表し、rはアンテナ切替周期の応じた相対速度による距離変化量を表す。
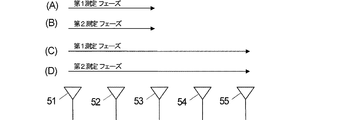
図5(A)は、第1測定フェーズでの物標までのレーダ装置からの往復距離の変化を示す図であり、図5(B)は、第2測定フェーズでの物標までのレーダ装置からの往復距離の変化を示す図である。
L+2r2=−d(sinθ+sinθr2)=−d・sinθ2 −(6)
なお、方位の符号は、図5に示すθ1,θ2の向きを負と定義している。
物標の相対速度が大きくなると、第1測定フェーズの切替周期T1と第2測定フェーズの切替周期T2との時間差(切替間隔差)Δtに対する距離差Δrも大きくなる。この往復の距離差2Δrに応じた位相差が第1測定フェーズと第2測定フェーズとの間で発生する。この際、送信信号の波長をλとして、この距離差2Δrに応じた位相差が、−λ/2〜+λ/2内に存在すれば、アンビギュイティは生じず、確実に相対速度Vを算出することができる。すなわち、2Δrによる位相差の絶対値が、λ/2以下であればよい。ここで、相対速度Vの候補は、λ/(2Δt)の間隔で現れる。したがって、相対速度Vの候補範囲における最大相対速度候補をVmax、最小相対速度候補をVminとすると、相対速度候補が一意に決定するのは、
|Vmax−Vmin|=(Vprv+ατ)−(Vprv−βτ)=(α+β)τ −(9’)
と表すことができる。
アンテナ素子間隔がdの場合、隣り合うアンテナ素子間で生じる距離差の検知範囲は、−d+nλ〜+d+nλ(nは整数)となる。すなわち、アンテナ素子と物標との位置関係による距離差と相対速度により生じる距離差とを加算した距離差は、−d+nλ〜+d+nλの範囲に入らなければ、前述の図6に示すような方位方向スペクトルのスペクトルピークが得られない。

アンテナ素子間隔dが0.5λ未満である場合に、(式A)のd1〜dkに現実のアンテナ素子間隔dを用いるのではなく、仮想設定したアンテナ素子間隔d’を用いる。
図9は方位方向スペクトルを示す図であり、(A)は現実のアンテナ素子間隔d=0.4λを用いた場合を示し、(B)仮想設定したアンテナ素子間隔d’=2d=0.8λを用いた場合を示す。
なお、図9に示す方位方向スペクトルは、図8(B)に示した方位方向スペクトルと同じ条件により得られたものである。すなわち、図9(A)と図8(B)とは同じ結果を示す。
L=d・sinθ=d’・sinθ’
の関係が成り立つので、
現実の方位θは、
θ=sin-1((d’/d)・sinθ’) −(式B)
から得ることができる。
本実施形態のレーダ装置は、アンテナ間隔dのみが異なり、他の構成は、第1の実施形態のレーダ装置と同じである。
本実施形態では、物標の相対速度Vとともに、物標の真の方位θをも算出するものであり、以下は真の方位θの算出方法について具体的に説明する。
L+2r1+nλ=−d・sinθ1 −(10)
となる。ただし、nは任意の整数である。
r1=V・T1 −(11−1)
L=−d・sinθ −(11−2)
であるので、式(10)、(11−1)、(11−2)より、
本実施形態のレーダ装置は、アンテナ素子間隔が不等間隔であり、他の構成は第1、第2の実施形態のレーダ装置と同じである。
図12(A)はアンテナ素子間隔を示す図であり、(B)は送信制御と切替制御との同期状態を示す説明図である。
本実施形態では、推定演算する方位角範囲(推定演算方位角範囲)を設定するものであり、他の構成は第3の実施形態に示したレーダ装置と同じである。
θcal=sin-1(λ/(2d)) −(17)
とする。
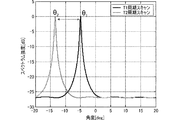
図13は複数の物標が同距離で異なる方位に存在して異なる相対速度を有する場合の方位方向スペクトルを示す図である。
第1測定フェーズでの受信信号によるスペクトルピークのレベルと、第2測定フェーズでの受信信号によるスペクトルピークのレベルとは、対象となる物標が同じ(単一)であれば、略同じとなる。したがって、物標毎にスペクトルピークレベルが相違し、同じ物標に対する第1測定フェーズのスペクトルピークレベルと第2測定フェーズのスペクトルピークレベルとは略同じになる。
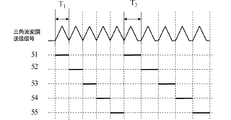
図15は、三角波変調信号を用いており、第1測定フェーズでは非変調区間が無く、第2測定フェーズでは非変調区間を設けたものである。
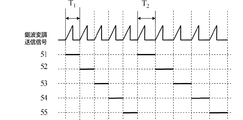
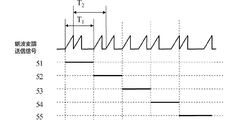
図16は、鋸波変調信号を用いており、一つの送信周期内に二つの変調区間を有するものである。そして、一つの送信周期内の二つの変調区間の間隔が各送信周期で異なる。この際、各アンテナ素子51〜55は、送信周期により切替制御される。そして、各アンテナ素子51〜55が受信する送信周期の最初の(第1の)変調区間に対応する鋸波変調信号にて第1測定フェーズを構成し、各アンテナ素子51〜55が受信する送信周期の第2の変調区間に対応する鋸波変調信号にて第2測定フェーズを構成する。
Claims (16)
- 送信アンテナと受信アンテナの少なくとも一方を直線上に配置された複数のアンテナ素子により構成し、前記直線上に配置された複数のアンテナ素子を送信信号の変調周期に同期して切り替えるレーダの物標検知方法であって、
前記複数のアンテナ素子を予め設定した所定切替パターンに基づいて、第1の時間間隔で切り替えて、物標の第1方位を算出する第1測定フェーズと、
前記複数のアンテナ素子を前記所定切替パターンに基づいて、前記第1の時間間隔とは異なる第2の時間間隔で切り替えて、前記物標の第2方位を算出する第2測定フェーズと、を有し、
前記第1方位、前記第2方位、前記第1の時間間隔、前記第2の時間間隔、および前記複数のアンテナ素子の配置間隔に基づいて前記物標の相対速度を算出するレーダの物標検知方法。 - 前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向から前記配列方向に広がる角度であって、−90°〜+90°の範囲内にある、前記第1方位および前記第2方位をそれぞれθ1,θ2、前記第1の時間間隔と前記第2の時間間隔との間隔時間差をΔt、前記複数のアンテナ素子の間隔をd、前記物標の相対速度候補をVとし、nを任意の整数とし、送信信号の波長をλとして、
演算式
V=d・(sinθ1−sinθ2)/(2・Δt)+n・λ/(2・Δt)
を用いて得られる候補の中から1つを選択して前記物標の相対速度を算出する請求項1に記載のレーダの物標検知方法。 - 目的とする物標の取り得る相対速度をVmin〜Vmaxとし、前記第1の時間間隔と前記第2の時間間隔との間隔時間差をΔtとし、送受信信号の波長をλとして、
Δt<λ/(2|Vmax−Vmin|)
となるように、前記第1の時間間隔と前記第2の時間間隔との差Δtを設定する請求項1または請求項2に記載のレーダの物標検知方法。 - 前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向から前記配列方向に広がる角度範囲であって、−90°〜+90°の範囲内に検知方位角範囲θmin〜θmaxを設定し、前記複数のアンテナ素子の配置間隔をdとし、送受信信号の波長をλとして、
d<λ/|sinθmax−sinθmin|
となるように、前記複数のアンテナ素子の配置間隔を設定する請求項1〜3のいずれかに記載のレーダの物標検知方法。 - 前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向を含んで算出方位角範囲を−θcal〜+θcalとし、
θcal=sin-1(λ/(2d))
の関係が成立するように、前記複数のアンテナ素子の配置間隔をdに設定し、送受信信号の波長をλに設定して、前記物標の相対速度と方位とを算出する請求項1〜4のいずれかに記載のレーダの物標検知方法。 - 前記複数のアンテナ素子の配置間隔dを送受信信号の波長λに対して0.5λ未満に設定した場合に、
各方位の算出時にアンテナ素子の配置間隔dを仮想的に0.5λ以上に設定して仮方位を算出し、当該算出された方位を前記0.5λ未満の設定状態に補正して前記方位を算出する請求項1〜5のいずれかに記載のレーダの物標検知方法。 - 前記複数のアンテナ素子を不等間隔に配置し、且つ当該不等間隔の最大公約数値を前記配置間隔dに一致させる請求項4〜6のいずれかに記載のレーダの物標検知方法。
- 前記第1の時間間隔と前記第2の時間間隔との間隔時間差Δtを可変に設定する請求項1〜7のいずれかに記載のレーダの物標検知方法。
- 送信アンテナと受信アンテナの少なくとも一方を直線上に配置された複数のアンテナ素子と、
前記直線上に配置された複数のアンテナ素子を送信信号の変調周期に同期して切り替える切替手段と、
得られた受信信号から物標を検知する物標検知手段と、を備えたレーダ装置において、
前記物標検知手段は、
前記複数のアンテナ素子を予め設定した所定切替パターンに基づいて、第1の時間間隔で切り替える第1測定フェーズで物標の第1方位を算出し、
前記複数のアンテナ素子を前記所定切替パターンに基づいて、前記第1の時間間隔とは異なる第2の時間間隔で切り替える第2測定フェーズで、前記物標の第2方位を算出し、
前記第1方位、前記第2方位、前記第1の時間間隔、前記第2の時間間隔、および前記複数のアンテナ素子の配置間隔に基づいて前記物標の相対速度を算出する、レーダ装置。 - 前記物標検知手段は、
前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向から前記配列方向に広がる角度であって、−90°〜+90°の範囲内にある、前記第1方位および前記第2方位をそれぞれθ1,θ2、前記第1の時間間隔と前記第2の時間間隔との間隔時間差をΔt、前記複数のアンテナ素子の間隔をd、前記物標の相対速度候補をVとし、nを任意の整数とし、送信信号の波長をλとして、
演算式
V=d・(sinθ1−sinθ2)/(2・Δt)+n・λ/(2・Δt)
を用いて得られる候補の中から1つを選択して前記物標の相対速度を算出する請求項9に記載のレーダ装置。 - 前記切替手段は、
目的とする物標の取り得る相対速度をVmin〜Vmaxとし、前記第1の時間間隔と前記第2の時間間隔との間隔時間差をΔtとし、送受信信号の波長をλとして、
Δt<λ/(2|Vmax−Vmin|)
となるように、前記第1の時間間隔と前記第2の時間間隔との差Δtを設定して、アンテナ素子を切り替える請求項9または請求項10に記載のレーダ装置。 - 前記複数のアンテナ素子の配置間隔は、
前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向から前記配列方向に広がる角度範囲であって、−90°〜+90°の範囲内に検知方位角範囲θmin〜θmaxを設定し、前記複数のアンテナ素子の配置間隔をdとし、送受信信号の波長をλとして、
d<λ/|sinθmax−sinθmin|
である、請求項9〜11のいずれかに記載のレーダ装置。 - 前記物標検知手段は、
前記送信信号の放射方向側で前記複数のアンテナ素子の配列方向に垂直な方向を0°方向とし、当該0°方向を含んで算出方位角範囲を−θcal〜+θcalとし、
θcal=sin-1(λ/(2d))
の関係が成立するように、前記複数のアンテナ素子の配置間隔をdに設定し、送受信信号の波長をλに設定して、前記物標の相対速度と方位とを算出する請求項9〜12のいずれかに記載のレーダ装置。 - 前記複数のアンテナ素子の配置間隔dは、送受信信号の波長λに対して0.5λ未満であり、
前記物標検知手段は、各方位の算出時にアンテナ素子の配置間隔dを仮想的に0.5λ以上に設定して仮方位を算出し、当該算出された方位を前記0.5λ未満の設定状態に補正して前記方位を算出する請求項9〜13のいずれかに記載のレーダ装置。 - 前記複数のアンテナ素子は、不等間隔に配置され、且つ当該不等間隔の最大公約数値を前記配置間隔dに一致させてなる請求項12〜14のいずれかに記載のレーダ装置。
- 前記物標検知手段は、前記第1の時間間隔と前記第2の時間間隔との間隔時間差Δtを可変とする制御を前記切替手段に行う請求項9〜15のいずれかに記載のレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008542029A JP4905457B2 (ja) | 2006-11-01 | 2007-10-12 | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006297475 | 2006-11-01 | ||
| JP2006297475 | 2006-11-01 | ||
| JP2008542029A JP4905457B2 (ja) | 2006-11-01 | 2007-10-12 | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 |
| PCT/JP2007/069954 WO2008053685A1 (fr) | 2006-11-01 | 2007-10-12 | Procédé de détection de cible par radar et dispositif de radar utilisant le procédé de détection de cible |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2008053685A1 JPWO2008053685A1 (ja) | 2010-02-25 |
| JP4905457B2 true JP4905457B2 (ja) | 2012-03-28 |
Family
ID=39344032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008542029A Expired - Fee Related JP4905457B2 (ja) | 2006-11-01 | 2007-10-12 | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7928897B2 (ja) |
| EP (1) | EP2060929A4 (ja) |
| JP (1) | JP4905457B2 (ja) |
| WO (1) | WO2008053685A1 (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7688253B2 (en) * | 2008-07-09 | 2010-03-30 | Honeywell International Inc. | Method and processor for reduced ambiguity resolution matrix for interferometric angle determination |
| US20100118033A1 (en) * | 2008-11-10 | 2010-05-13 | Vistaprint Technologies Limited | Synchronizing animation to a repetitive beat source |
| DE102009002243A1 (de) * | 2009-04-07 | 2010-10-14 | Robert Bosch Gmbh | FMCW-Radarsensor und Verfahren zum Frequenzmatching |
| JP5264606B2 (ja) * | 2009-04-22 | 2013-08-14 | 三菱電機株式会社 | レーダ装置 |
| DE102009027003A1 (de) * | 2009-06-17 | 2010-12-23 | Endress + Hauser Gmbh + Co. Kg | Optimierung der Schaltreihenfolge bei geschalteten Antennenarrays |
| JP2011013056A (ja) * | 2009-07-01 | 2011-01-20 | Toyota Central R&D Labs Inc | レーダ装置 |
| DE102009029503A1 (de) * | 2009-09-16 | 2011-03-24 | Robert Bosch Gmbh | Radarsensorvorrichtung mit wenigstens einer planaren Antenneneinrichtung |
| JP5653726B2 (ja) * | 2010-11-12 | 2015-01-14 | 株式会社デンソー | レーダ装置 |
| JP5655516B2 (ja) * | 2010-11-12 | 2015-01-21 | 株式会社デンソー | レーダ装置 |
| JP5677830B2 (ja) * | 2010-12-22 | 2015-02-25 | 日本電産エレシス株式会社 | 電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム |
| JP5628732B2 (ja) * | 2011-04-04 | 2014-11-19 | 富士通テン株式会社 | レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム |
| JP5721578B2 (ja) * | 2011-07-22 | 2015-05-20 | 三菱電機株式会社 | レーダ装置 |
| US20130088393A1 (en) * | 2011-10-06 | 2013-04-11 | Toyota Motor Engineering & Manufacturing North America, Inc. | Transmit and receive phased array for automotive radar improvement |
| US8941536B2 (en) * | 2011-11-01 | 2015-01-27 | The Charles Stark Draper Laboratory, Inc. | Short-range homodyne radar system |
| US8937570B2 (en) * | 2012-09-28 | 2015-01-20 | Battelle Memorial Institute | Apparatus for synthetic imaging of an object |
| JP6205729B2 (ja) * | 2013-01-21 | 2017-10-04 | 株式会社デンソー | レーダ装置 |
| DE102013212090A1 (de) * | 2013-06-25 | 2015-01-08 | Robert Bosch Gmbh | Winkelauflösender FMCW-Radarsensor |
| JP6338871B2 (ja) * | 2014-01-31 | 2018-06-06 | 株式会社デンソーテン | レーダ装置、車両制御システム及び信号処理方法 |
| DE102014212284A1 (de) | 2014-06-26 | 2015-12-31 | Robert Bosch Gmbh | MIMO-Radarmessverfahren |
| DE102014212281A1 (de) * | 2014-06-26 | 2015-12-31 | Robert Bosch Gmbh | Radarmessverfahren mit unterschiedlichen Sichtbereichen |
| WO2017019571A1 (en) * | 2015-07-29 | 2017-02-02 | Lattice Semiconductor Corporation | Angular velocity sensing using arrays of antennas |
| US10879975B2 (en) | 2015-07-08 | 2020-12-29 | Qualcomm Incorporated | Beamforming based on adjacent beams systems and methods |
| US10021583B2 (en) | 2015-07-08 | 2018-07-10 | Qualcomm Incoporated | Beam splitting systems and methods |
| US10211524B2 (en) | 2015-07-08 | 2019-02-19 | Qualcomm Incorporated | Antenna isolation systems and methods |
| US11879989B2 (en) | 2016-12-05 | 2024-01-23 | Echodyne Corp. | Antenna subsystem with analog beam-steering transmit array and sparse hybrid analog and digital beam-steering receive array |
| EP3545334A1 (en) * | 2016-12-05 | 2019-10-02 | Echodyne Corp | Antenna subsystem with analog beam-steering transmit array and digital beam-forming receive array |
| DE102017204496A1 (de) * | 2017-03-17 | 2018-09-20 | Robert Bosch Gmbh | Verfahren und Radarvorrichtung zum Ermitteln von radialer relativer Beschleunigung mindestens eines Zieles |
| US10712437B2 (en) | 2017-07-07 | 2020-07-14 | Veoneer Us, Inc. | Radar systems and methods utilizing composite waveforms for customization of resolution requirements |
| JP6570610B2 (ja) * | 2017-12-22 | 2019-09-04 | 三菱電機株式会社 | レーダ装置 |
| US11914021B2 (en) * | 2018-03-30 | 2024-02-27 | Alouette Technology Inc. | Velocity measurement device, velocity measurement program, recording medium, and velocity measurement method |
| DE102018124503A1 (de) * | 2018-10-04 | 2020-04-09 | HELLA GmbH & Co. KGaA | Radarsystem für ein Fahrzeug |
| US11073607B2 (en) * | 2018-11-28 | 2021-07-27 | Lockheed Martin Corporation | Wideband radar systems, apparatuses, and methods |
| JP6888222B2 (ja) | 2019-02-08 | 2021-06-16 | サムソン エレクトロ−メカニックス カンパニーリミテッド. | チップアンテナモジュール |
| JP7390658B2 (ja) * | 2020-03-18 | 2023-12-04 | パナソニックIpマネジメント株式会社 | レーダ装置 |
| US20220349985A1 (en) * | 2021-04-28 | 2022-11-03 | Qualcomm Incorporated | Radar interference mitigation |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2617093A (en) * | 1946-04-05 | 1952-11-04 | Gen Electric | Radio apparatus for indicating speed and course of objects |
| JP3270697B2 (ja) * | 1996-12-06 | 2002-04-02 | 財団法人鉄道総合技術研究所 | 回転位置/速度検出方法 |
| JP3525425B2 (ja) * | 1997-10-31 | 2004-05-10 | トヨタ自動車株式会社 | Fm−cwレーダ |
| US5999117A (en) * | 1998-06-16 | 1999-12-07 | Northrop Grumman Corporation | Method for tracking and detecting turns of maneuvering targets |
| JP3622565B2 (ja) * | 1999-03-31 | 2005-02-23 | 株式会社デンソー | レーダ装置 |
| JP3393204B2 (ja) * | 1999-10-06 | 2003-04-07 | 株式会社ホンダエレシス | マルチビームレーダ装置 |
| JP3575694B2 (ja) * | 2002-04-24 | 2004-10-13 | 株式会社ホンダエレシス | 走査型fmcwレーダ |
| JP3988520B2 (ja) * | 2002-04-25 | 2007-10-10 | 株式会社デンソー | ホログラフィックレーダ |
| JP3988653B2 (ja) * | 2003-02-10 | 2007-10-10 | 株式会社デンソー | アンテナの配列方法、及びレーダ装置 |
| JP2004271233A (ja) * | 2003-03-05 | 2004-09-30 | Fujitsu Ten Ltd | 異常検出機能を備えたレーダ装置 |
| JP4545460B2 (ja) * | 2004-03-10 | 2010-09-15 | 三菱電機株式会社 | レーダ装置およびアンテナ装置 |
| JP2006003303A (ja) * | 2004-06-21 | 2006-01-05 | Fujitsu Ten Ltd | レーダ装置 |
| JP4833534B2 (ja) * | 2004-09-29 | 2011-12-07 | 富士通株式会社 | レーダ装置 |
-
2007
- 2007-10-12 EP EP07829690A patent/EP2060929A4/en not_active Withdrawn
- 2007-10-12 JP JP2008542029A patent/JP4905457B2/ja not_active Expired - Fee Related
- 2007-10-12 WO PCT/JP2007/069954 patent/WO2008053685A1/ja active Application Filing
-
2009
- 2009-04-23 US US12/428,774 patent/US7928897B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20090224960A1 (en) | 2009-09-10 |
| EP2060929A1 (en) | 2009-05-20 |
| WO2008053685A1 (fr) | 2008-05-08 |
| EP2060929A4 (en) | 2013-03-06 |
| JPWO2008053685A1 (ja) | 2010-02-25 |
| US7928897B2 (en) | 2011-04-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4905457B2 (ja) | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 | |
| JP4433085B2 (ja) | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 | |
| JP4737165B2 (ja) | レーダの物標検知方法、およびこの物標検知方法を用いたレーダ装置 | |
| JP5093298B2 (ja) | 方位検出装置 | |
| CN108845295B (zh) | 用于确定对象位置的设备、方法和雷达系统 | |
| JP6331195B2 (ja) | レーダ装置 | |
| JP6818541B2 (ja) | レーダ装置および測位方法 | |
| CN108885254B (zh) | 物体检测装置 | |
| US7466260B2 (en) | Radar apparatus | |
| US6859168B2 (en) | Radar apparatus | |
| US20190195984A1 (en) | Radar device | |
| US20070182619A1 (en) | Monopulse radar apparatus and antenna switch | |
| JP2019052952A (ja) | レーダ装置 | |
| WO2013080570A1 (ja) | レーダ装置 | |
| JP3821688B2 (ja) | レーダ装置 | |
| JP6911778B2 (ja) | レーダ装置 | |
| JP2021513657A (ja) | 自動車用の角度分解型で広帯域のレーダセンサ | |
| JP2007333656A (ja) | レーダ装置 | |
| EP3572838A1 (en) | Radar device | |
| JP2019074404A (ja) | レーダ装置及びレーダ装置の送信処理方法 | |
| JP2009109417A (ja) | レーダシステムとレーダ搭載移動体装置 | |
| JP3865761B2 (ja) | レーダ装置 | |
| US20120119940A1 (en) | Radar apparatus with multi-receiver channel | |
| JP2016205821A (ja) | レーダ装置 | |
| JP2016057168A (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110419 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111213 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111226 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150120 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |