JP4899073B2 - 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 - Google Patents
円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 Download PDFInfo
- Publication number
- JP4899073B2 JP4899073B2 JP2007528578A JP2007528578A JP4899073B2 JP 4899073 B2 JP4899073 B2 JP 4899073B2 JP 2007528578 A JP2007528578 A JP 2007528578A JP 2007528578 A JP2007528578 A JP 2007528578A JP 4899073 B2 JP4899073 B2 JP 4899073B2
- Authority
- JP
- Japan
- Prior art keywords
- pulley
- conical pulley
- conical
- movable pulley
- output side
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 115
- 238000004804 winding Methods 0.000 title claims description 59
- 238000004519 manufacturing process Methods 0.000 title description 9
- 238000000034 method Methods 0.000 title description 5
- 230000006835 compression Effects 0.000 claims description 13
- 238000007906 compression Methods 0.000 claims description 13
- 239000002184 metal Substances 0.000 claims description 6
- 230000009977 dual effect Effects 0.000 claims description 5
- 238000007789 sealing Methods 0.000 claims description 5
- 238000005520 cutting process Methods 0.000 claims description 4
- 238000011109 contamination Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 23
- 238000003825 pressing Methods 0.000 description 12
- 230000033001 locomotion Effects 0.000 description 10
- 239000003921 oil Substances 0.000 description 10
- 238000005452 bending Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 239000007787 solid Substances 0.000 description 7
- 230000008901 benefit Effects 0.000 description 5
- 238000002788 crimping Methods 0.000 description 5
- 238000013016 damping Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 230000005284 excitation Effects 0.000 description 5
- 230000009471 action Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000006872 improvement Effects 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 4
- 238000003892 spreading Methods 0.000 description 4
- 230000007480 spreading Effects 0.000 description 4
- 230000002706 hydrostatic effect Effects 0.000 description 3
- 230000009347 mechanical transmission Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- 239000007858 starting material Substances 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000001609 comparable effect Effects 0.000 description 2
- 210000004513 dentition Anatomy 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 230000036346 tooth eruption Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000007730 finishing process Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000010534 mechanism of action Effects 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H9/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members
- F16H9/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion
- F16H9/04—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes
- F16H9/12—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley built-up out of relatively axially-adjustable parts in which the belt engages the opposite flanges of the pulley directly without interposed belt-supporting members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H55/00—Elements with teeth or friction surfaces for conveying motion; Worms, pulleys or sheaves for gearing mechanisms
- F16H55/32—Friction members
- F16H55/52—Pulleys or friction discs of adjustable construction
- F16H55/56—Pulleys or friction discs of adjustable construction of which the bearing parts are relatively axially adjustable
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66272—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members characterised by means for controlling the torque transmitting capability of the gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H2061/66295—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members characterised by means for controlling the geometrical interrelationship of pulleys and the endless flexible member, e.g. belt alignment or position of the resulting axial pulley force in the plane perpendicular to the pulley axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/04—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism
- F16H63/06—Final output mechanisms therefor; Actuating means for the final output mechanisms a single final output mechanism being moved by a single final actuating mechanism the final output mechanism having an indefinite number of positions
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmissions By Endless Flexible Members (AREA)
- General Details Of Gearings (AREA)
- Friction Gearing (AREA)
- Pulleys (AREA)
- Control Of Transmission Device (AREA)
- Automobile Manufacture Line, Endless Track Vehicle, Trailer (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
Description
変速機の駆動側もしくは入力側には、制御可能なクラッチ、たとえば湿式または乾式の摩擦クラッチ、ハイドロダイナミック式のクラッチまたはハイドロダイナミック式のコンバータの形の始動ユニットが設けられている。
−オイルの形の粘性媒体もしくはハイドロリック媒体、
−円錐形プーリと巻掛け手段との間の接触範囲の表面性質、
−少なくとも1つの円錐形プーリのジオメトリ(幾何学的形状)、
−少なくとも1つの円錐形プーリの減衰、
−少なくとも1つの円錐形プーリの案内、
ことを特徴とする円錐形プーリ式巻掛け変速機も寄与し得る。
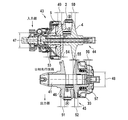
図2は、円錐形プーリ式巻掛け変速機の別の実施例を示す、図1にほぼ相当する図面であり、
図3および図4は、摩擦係数の関係を示す線図であり、
図5および図6は、可動プーリの種々の実施例aを示す概略図であり、
図7は、可動プーリの非対称的な皿状変形を示す概略図であり、
図8aは、ジオメトリ的に類似した円錐形プーリセットを備えた円錐形プーリ式巻掛け変速機を示す概略図であり、
図8bは、剛性最適化された円錐形プーリセットを備えた円錐形プーリ式巻掛け変速機を示す概略図であり、
図9および図10は、出力側の円錐形プーリペアの種々の実施例を示す概略図である。
47−入力側の可動プーリネック部直径
48−出力側の可動プーリネック部直径
49−入力側の可動プーリディスク部幅
50−入力側の固定プーリディスク部幅
51−出力側の固定プーリディスク部幅
52−出力側の可動プーリディスク部幅
53−入力側の小さなスライドシートの長さ
54−入力側の大きなスライドシートの長さ
55−出力側の大きなスライドシートの長さ
56−出力側の小さなスライドシートの長さ。
−出力側の円錐形プーリセット45が、円錐形プーリ33,46のジオメトリ(幾何学的形状)により入力側の円錐形プーリセット44に比べて補強され、
−可動プーリ33,5が、固定プーリ4,46に比べて補強され、
−スライドシートの長さ55,56が、出力側において、入力側のスライドシート長さ54,53に比べて増大され、
−出力側の可動プーリネック部直径48が、入力側の可動プーリネック部直径47に比べて拡大され、
−可動プーリ33の出力側の大きなスライドシート55が、アンダドライブ位置(巻掛け手段2が半径方向外側を走行する場合)においてできるだけ大きな案内長さを有するように前記スライドシート55が形成される。
2 リンクプレートチェーン
2a リンクプレートチェーンの半径方向内側の位置
3 シャフト
4 固定プーリ
5 可動プーリ
6 歯車
7 玉軸受け
8 ディスク
9 シャフトナット
10 トルクセンサ
11 軸方向で定位置の拡開ディスク
12 軸方向で移動可能な拡開ディスク
13 拡開ディスク機構
14 ボール
15 第1の圧力室
16 第2の圧力室
17 ピストンシリンダユニット
18 第1の圧力室
19 第2の圧力室
20(3つの)通路(供給部)
21 通路(流出側)
22 センタリング面
23 騒音減衰装置
24 (真ん中の)孔
25 横方向孔
26 旋削加工部
27 歯列
28 接続孔
29 中空室/チャンバ
30 制御孔
31 栓体
32 皿ばね
33 可動プーリ(出力側)
34 補剛リブ
35 補剛つば(外側)
36 補剛つば(内側)
37 ハブ
38 補剛リング
39 ばね
40 外側案内部
41 シャフト(出力側)
42 円錐形プーリディスク部
43 バリエータ
44 入力側の(円錐形)プーリセット
45 出力側の(円錐形)プーリセット
46 固定プーリ 出力側
47 可動プーリネック部直径 入力側
48 可動プーリネック部直径 出力側
49 可動プーリディスク部の幅 入力側
50 固定プーリディスク部の幅 入力側
51 固定プーリディスク部の幅 出力側
52 可動プーリディスク部の幅 出力側
53 スライドシート長さ 小 入力側
54 スライドシート長さ 大 入力側
55 スライドシート長さ 大 出力側
56 スライドシート長さ 小 出力側
57 圧縮ばね
58 金属薄板部分(シール部材摺動路)
59 シール部材
60 遠心オイルフード
61 フランジ部分
62 スライドシート
63 シール部材
Claims (27)
- 円錐形プーリ式巻掛け変速機(1)であって、入力側の円錐形プーリペアと出力側の円錐形プーリペアとが設けられており、両円錐形プーリペアが、それぞれ1つの固定プーリ(4,46)と1つの可動プーリ(5,33)とを有しており、該固定プーリ(4,46)と該可動プーリ(5,33)とが、それぞれ入力側および出力側のシャフト(3,41)に配置されていて、トルク伝達のための巻掛け手段(2)を介して結合可能である形式のものにおいて、剛性最適化されたバリエータ(43)が設けられており、半径方向外側で作用する力に対する剛性が、出力側の円錐形プーリセット(45)において、入力側の円錐形プーリセット(44)におけるよりも大きく形成されていることを特徴とする円錐形プーリ式巻掛け変速機。
- 出力側の円錐形プーリセットにおける剛性が1.2〜3倍だけ大きく形成されている、請求項1記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、入力側の可動プーリ(5)よりも高い剛性を有している、請求項1または2記載の円錐形プーリ式巻掛け変速機。
- 出力側の円錐形プーリ(33,46)が、入力側の円錐形プーリ(4,5)よりもジオメトリ(幾何学的形状)的に厚肉な円錐形プーリディスク部を有している、請求項1から3までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、入力側の可動プーリ(5)よりもジオメトリ的に厚肉な円錐形プーリネック部(37)を有している、請求項1から4までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、出力側の固定プーリ(46)よりもジオメトリ的に厚肉な円錐形プーリディスク部を有している、請求項1から5までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 入力側の可動プーリ(5)が、入力側の固定プーリ(4)よりもジオメトリ的に厚肉な円錐形プーリディスク部を有している、請求項1から6までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、入力側の可動プーリ(5)よりも小さな案内遊びを有している、請求項1から7までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、入力側の可動プーリ(5)よりも長いガイドシートを有している、請求項1から8までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 少なくとも1つの可動プーリ(5,33)が、該可動プーリとワンピースに、つまり一体に形成された少なくとも1つのシール部材摺動路を有している、請求項1から9までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 少なくとも1つの可動プーリ(5,33)が、直接に結合された2つのシール部材摺動路を有している、請求項1から10までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- シール部材摺動路が切削加工により製作されている、請求項10または11記載の円錐形プーリ式巻掛け変速機。
- シール部材摺動路が非切削加工により製作されている、請求項10または11記載の円錐形プーリ式巻掛け変速機。
- 組み立てられた状態で、前記少なくとも1つのシール個所の他に、汚染室として働く自由な範囲が設けられている、請求項10から13までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が円筒状の円錐形プーリネック部(37)を有している、請求項1から14までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 前記円錐形プーリネック部(37)が、ばねセンタリング部として働く、請求項15記載の円錐形プーリ式巻掛け変速機。
- 前記円錐形プーリネック部(37)が、半円形の溝を有している、請求項15または16記載の円錐形プーリ式巻掛け変速機。
- 前記溝がばね当て付け部として働く、請求項17記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、半径方向で外側に位置する圧縮ばね(57)を有している、請求項1から18までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 前記ばね(57)が円筒状に形成されている、請求項19記載の円錐形プーリ式巻掛け変速機。
- 前記ばね(57)がくびれ状に形成されている、請求項19記載の円錐形プーリ式巻掛け変速機。
- 前記ばね(57)が円錐状に形成されている、請求項19記載の円錐形プーリ式巻掛け変速機。
- 出力側の可動プーリ(33)が、少なくとも1つの装着された金属薄板部分(58)を有している、請求項1から22までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 前記金属薄板部分(58)が、少なくとも1つのシール部材のためのシール部材摺動路として働く、請求項23記載の円錐形プーリ式巻掛け変速機。
- 出力側の固定プーリ(46)が、入力側の固定プーリ(4)よりも高い剛性を有している、請求項1から24までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- バリエータ(43)が、デュアルピストン原理により形成されている、請求項1から25までのいずれか1項記載の円錐形プーリ式巻掛け変速機。
- 請求項1から26までのいずれか1項記載の円錐形プーリ式巻掛け変速機が設けられていることを特徴とする車両。
Applications Claiming Priority (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102004040826 | 2004-08-24 | ||
| DE102004040826.2 | 2004-08-24 | ||
| DE102004041715.6 | 2004-08-28 | ||
| DE102004041715 | 2004-08-28 | ||
| DE102004042883 | 2004-09-04 | ||
| DE102004042883.2 | 2004-09-04 | ||
| DE102004043536 | 2004-09-09 | ||
| DE102004043536.7 | 2004-09-09 | ||
| DE102004044190 | 2004-09-14 | ||
| DE102004044190.1 | 2004-09-14 | ||
| DE102004046213 | 2004-09-22 | ||
| DE102004046213.5 | 2004-09-22 | ||
| PCT/DE2005/001415 WO2006021184A1 (de) | 2004-08-24 | 2005-08-11 | Kegelscheibenumschlingungsgetriebe, verfahren zu dessen herstellung sowie fahrzeug mit einem derartigen getriebe |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008510939A JP2008510939A (ja) | 2008-04-10 |
| JP4899073B2 true JP4899073B2 (ja) | 2012-03-21 |
Family
ID=35045223
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007528579A Withdrawn JP2008510940A (ja) | 2004-08-24 | 2005-08-11 | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 |
| JP2007528577A Pending JP2008510938A (ja) | 2004-08-24 | 2005-08-11 | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 |
| JP2007528578A Expired - Fee Related JP4899073B2 (ja) | 2004-08-24 | 2005-08-11 | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007528579A Withdrawn JP2008510940A (ja) | 2004-08-24 | 2005-08-11 | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 |
| JP2007528577A Pending JP2008510938A (ja) | 2004-08-24 | 2005-08-11 | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 |
Country Status (6)
| Country | Link |
|---|---|
| EP (4) | EP1784589A1 (ja) |
| JP (3) | JP2008510940A (ja) |
| KR (3) | KR20070043972A (ja) |
| AT (2) | ATE412838T1 (ja) |
| DE (8) | DE112005002713A5 (ja) |
| WO (6) | WO2006021187A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4770709B2 (ja) * | 2006-11-14 | 2011-09-14 | トヨタ自動車株式会社 | 動力伝達機構の振動抑制装置、振動抑制方法およびその方法をコンピュータに実現させるプログラムならびにそのプログラムを記録した記録媒体 |
| JP5306858B2 (ja) * | 2009-02-28 | 2013-10-02 | 本田技研工業株式会社 | Vベルト式無段変速機 |
| JP7223731B2 (ja) | 2020-09-09 | 2023-02-16 | 本田技研工業株式会社 | 無段変速機 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH074499A (ja) * | 1993-04-30 | 1995-01-10 | Ntn Corp | 可変速プーリー |
| JP2003287098A (ja) * | 2002-03-28 | 2003-10-10 | Honda Motor Co Ltd | ベルト式無段変速機 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB151090A (en) * | 1919-06-17 | 1920-09-17 | John Howard Smith | New and improved driving chain-belt |
| US2892354A (en) * | 1957-12-13 | 1959-06-30 | George H Amonsen | Variable speed pulley |
| US3365967A (en) * | 1965-06-07 | 1968-01-30 | Moogk Friedrich | Stepless variable v-belt driving gear with asymmetric v-belt |
| JPH01238767A (ja) * | 1987-10-26 | 1989-09-22 | Toyota Motor Corp | ベルト式無段変速機用プーリ |
| DE19544061B4 (de) * | 1994-12-06 | 2005-09-01 | Volkswagen Ag | Verfahren zur Betätigungsregelung von Schaltelementen oder Stellgliedern von Automatikgetrieben |
| JP3248615B2 (ja) * | 1997-01-24 | 2002-01-21 | 愛知機械工業株式会社 | ベルト式無段変速機のプーリ用シリンダ構造 |
| JP2000130527A (ja) * | 1998-10-30 | 2000-05-12 | Nissan Motor Co Ltd | Vベルト式無段変速機用プーリー及び無段変速機 |
| DE19958073B4 (de) | 1998-12-16 | 2012-04-26 | Schaeffler Technologies Gmbh & Co. Kg | Kegelscheibenumschlingungsgetriebe |
| BE1012482A3 (nl) * | 1999-02-24 | 2000-11-07 | Zf Getriebe N V Sint Truiden | Transmissie-eenheid voor motorvoertuigen, riemschijf hierbij aangewend en werkwijze voor het vervaardigen van zulke riemschijf. |
| DE19942309A1 (de) * | 1999-09-04 | 2001-03-08 | Walter Schopf | Übertragungsstrang für CVT's, mit Schub- und Zugfunktion |
| JP4945821B2 (ja) * | 2001-02-12 | 2012-06-06 | シェフラー テクノロジーズ アクチエンゲゼルシャフト ウント コンパニー コマンディートゲゼルシャフト | 無段式に調節可能な円錐形ディスク式巻掛け伝動装置 |
| WO2002101264A2 (de) * | 2001-06-13 | 2002-12-19 | Luk Lamellen Und Kupplungsbau Beteiligungs Kg | Verfahren und ein system zum regeln des drehmomentübertragungsvermögens einer reibschlüssig drehmoment übertragenden baugruppe |
| EP1605190A3 (de) * | 2002-04-10 | 2009-09-16 | LuK Lamellen und Kupplungsbau Beteiligungs KG | Verfahren zum Bestimmen der Drehzahl eines Bauteils, zum Feststellen des Rutschens eines CVT-Getriebes und zur Steuerung eines CVT-Getriebes sowie Kegelscheibenumschlingungsgetriebe |
| DE10222973A1 (de) * | 2002-05-23 | 2003-12-04 | Univ Karlsruhe | Zugmittel in CVT-Getrieben |
| JP2005530110A (ja) | 2002-06-17 | 2005-10-06 | ルーク ラメレン ウント クツプルングスバウ ベタイリグングス コマンディートゲゼルシャフト | 円錐形ディスク式巻掛け伝動装置 |
| JP2004190829A (ja) * | 2002-12-13 | 2004-07-08 | Koyo Seiko Co Ltd | 動力伝達用チェーンおよび動力伝達装置 |
| JP4806827B2 (ja) | 2003-04-07 | 2011-11-02 | シェフラー テクノロジーズ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 円錐形ディスク式巻掛け伝動装置および突起付きリング |
-
2005
- 2005-08-11 EP EP05773064A patent/EP1784589A1/de not_active Withdrawn
- 2005-08-11 EP EP05773092A patent/EP1784590B1/de not_active Not-in-force
- 2005-08-11 AT AT05775339T patent/ATE412838T1/de not_active IP Right Cessation
- 2005-08-11 DE DE112005002713T patent/DE112005002713A5/de not_active Withdrawn
- 2005-08-11 DE DE112005002714T patent/DE112005002714A5/de not_active Withdrawn
- 2005-08-11 WO PCT/DE2005/001418 patent/WO2006021187A1/de active Application Filing
- 2005-08-11 DE DE112005002709T patent/DE112005002709A5/de not_active Withdrawn
- 2005-08-11 WO PCT/DE2005/001415 patent/WO2006021184A1/de active Application Filing
- 2005-08-11 WO PCT/DE2005/001416 patent/WO2006021185A1/de active Application Filing
- 2005-08-11 DE DE112005002711T patent/DE112005002711A5/de not_active Withdrawn
- 2005-08-11 KR KR1020077001099A patent/KR20070043972A/ko not_active Application Discontinuation
- 2005-08-11 JP JP2007528579A patent/JP2008510940A/ja not_active Withdrawn
- 2005-08-11 JP JP2007528577A patent/JP2008510938A/ja active Pending
- 2005-08-11 DE DE112005002712T patent/DE112005002712A5/de not_active Withdrawn
- 2005-08-11 JP JP2007528578A patent/JP4899073B2/ja not_active Expired - Fee Related
- 2005-08-11 WO PCT/DE2005/001417 patent/WO2006021186A1/de active Application Filing
- 2005-08-11 AT AT05773092T patent/ATE427437T1/de not_active IP Right Cessation
- 2005-08-11 DE DE112005002710T patent/DE112005002710A5/de not_active Withdrawn
- 2005-08-11 KR KR1020077001098A patent/KR20070043971A/ko not_active Application Discontinuation
- 2005-08-11 DE DE502005007011T patent/DE502005007011D1/de active Active
- 2005-08-11 EP EP05775339A patent/EP1784591B1/de not_active Not-in-force
- 2005-08-11 WO PCT/DE2005/001419 patent/WO2006021188A1/de active Application Filing
- 2005-08-11 DE DE502005005825T patent/DE502005005825D1/de active Active
- 2005-08-11 EP EP05771465A patent/EP1789700A2/de not_active Withdrawn
- 2005-08-11 KR KR1020077001100A patent/KR20070043973A/ko not_active Application Discontinuation
- 2005-08-11 WO PCT/DE2005/001414 patent/WO2006021183A2/de active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH074499A (ja) * | 1993-04-30 | 1995-01-10 | Ntn Corp | 可変速プーリー |
| JP2003287098A (ja) * | 2002-03-28 | 2003-10-10 | Honda Motor Co Ltd | ベルト式無段変速機 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2006021184A1 (de) | 2006-03-02 |
| DE502005007011D1 (de) | 2009-05-14 |
| DE502005005825D1 (de) | 2008-12-11 |
| DE112005002712A5 (de) | 2007-08-09 |
| WO2006021183A2 (de) | 2006-03-02 |
| DE112005002709A5 (de) | 2007-08-09 |
| EP1784589A1 (de) | 2007-05-16 |
| ATE412838T1 (de) | 2008-11-15 |
| WO2006021185A1 (de) | 2006-03-02 |
| EP1789700A2 (de) | 2007-05-30 |
| KR20070043971A (ko) | 2007-04-26 |
| JP2008510938A (ja) | 2008-04-10 |
| WO2006021186A1 (de) | 2006-03-02 |
| DE112005002710A5 (de) | 2007-08-09 |
| EP1784590A1 (de) | 2007-05-16 |
| WO2006021187A1 (de) | 2006-03-02 |
| KR20070043973A (ko) | 2007-04-26 |
| DE112005002713A5 (de) | 2007-08-09 |
| WO2006021188A1 (de) | 2006-03-02 |
| EP1784590B1 (de) | 2009-04-01 |
| JP2008510939A (ja) | 2008-04-10 |
| EP1784591B1 (de) | 2008-10-29 |
| KR20070043972A (ko) | 2007-04-26 |
| EP1784591A1 (de) | 2007-05-16 |
| ATE427437T1 (de) | 2009-04-15 |
| DE112005002714A5 (de) | 2007-08-09 |
| JP2008510940A (ja) | 2008-04-10 |
| DE112005002711A5 (de) | 2007-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006118710A (ja) | 円錐円盤巻掛け伝動装置、円錐円盤巻掛け伝動装置を制御かつ/または運転する方法ならびにこの種の伝動装置を備えた車両 | |
| US20060058128A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| US20060058143A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| KR20070052741A (ko) | 원뿔 풀리 가요성 구동 트랜스미션, 상기 구동트랜스미션의 제조 방법 및 상기 구동 트랜스미션을 구비한차량 | |
| JP4899073B2 (ja) | 円錐形プーリ式巻掛け変速機、該円錐形プーリ式巻掛け変速機を製造するための方法ならびにこのような円錐形プーリ式巻掛け変速機を備えた車両 | |
| US20060058127A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| US20060052192A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| US20060058130A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| US20060058126A1 (en) | Belt-driven conical-pulley transmission, method for producing it, and motor vehicle having such a transmission | |
| JP2006509971A (ja) | 無段階変速機 | |
| JP4360554B2 (ja) | 変速機 | |
| JP7387222B2 (ja) | 変速機 | |
| JP7391464B2 (ja) | 変速機 | |
| JP5238962B2 (ja) | 円錐形プーリ式巻掛け変速機および当該変速機を備えた車両 | |
| JP4809526B2 (ja) | ベルト式無段変速機 | |
| JP2010242863A (ja) | ベルト式無段変速機 | |
| JP7242133B2 (ja) | 変速機 | |
| JP7305375B2 (ja) | 変速機 | |
| JP4870507B2 (ja) | ベルト式無段変速機のリターンスプリング設計方法及びその設計方法により設計されたリターンスプリング | |
| CN100532884C (zh) | 锥盘缠绕接触装置变速器,其制造方法以及具有这种变速器的机动车 | |
| JP6531519B2 (ja) | 車両の変速システム | |
| JP7483307B2 (ja) | 変速ユニット | |
| JP7301469B2 (ja) | 変速機 | |
| JP7221111B2 (ja) | 変速ユニット | |
| JP4072875B2 (ja) | 無段変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080707 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110107 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110407 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110414 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110428 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110607 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20111207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20111207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4899073 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150113 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |