JP4873129B2 - 基板把持装置 - Google Patents
基板把持装置 Download PDFInfo
- Publication number
- JP4873129B2 JP4873129B2 JP2006039116A JP2006039116A JP4873129B2 JP 4873129 B2 JP4873129 B2 JP 4873129B2 JP 2006039116 A JP2006039116 A JP 2006039116A JP 2006039116 A JP2006039116 A JP 2006039116A JP 4873129 B2 JP4873129 B2 JP 4873129B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- gripping
- gripping means
- rotation support
- weight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
これらの問題を解決するために、基板の自重によって動作する基板把持機構を備えた基板搬送・処理装置が公知となっている。(例えば、特許文献1乃至3参照)。
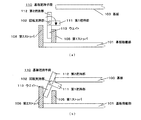
図6において、1は基板把持機構であり、基板2搭載前は基板把持機構1の重量バランスにより、基板把持機構1が図6において時計回りに回転した位置で、かつ基板搭載テーブル4と接触した位置にて静止している。基板2が搭載されると基板2の裏面が基板裏面支え1gに接触し、基板2の自重により支点1bを中心に図6において反時計回りに基板把持機構1が回転する。回転はストッパ1cによって停止し、この位置にて基板2は保持される。このとき、基板端部接触部1eおよび基板裏面支え1gによって基板2は固定される。さらに基板2が固定されるときには、複数の基板把持機構1が同時に動作し、基板把持機構1と基板2が接触して基板2を位置決めする。基板把持機構1より基板2を取り出すときには、図示しないロボットなどの基板昇降手段が基板2の裏面を持ち上げると、基板2の自重によってストッパ1cにて停止していた基板把持機構1が、図6において時計回りに回転し基板2は、基板把持機構1から降ろされる。このとき基板把持機構1は重量のバランスによって時計回りに回転し、基板搭載テーブル4と接触する位置で停止する。
上記パーティクルの発生に対しては、ダウンフローによって、汚染を防止しているが、パーティクル発生源が基板の極めて近い位置にある上、基板把持手段が取り付けられる装置の形状との兼ね合いで、ダウンフローの巻き返し等の気流の乱れが発生するため、完全にこれを防止することはできない。
請求項1に記載の発明は、基板を載置する基板搭載部と、前記基板搭載部に設けられた回転支持部と、前記回転支持部を中心に前記基板の半径方向に回転可能な基板把持手段と、を備え、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記基板を把持する基板把持装置において、前記基板把持手段は、前記基板に接触する第1把持部と第2把持部とウエイトとを備え、前記基板搭載部は、前記基板把持手段が前記基板を把持する位置および開放する位置で、それぞれ前記ウエイトが当接するストッパを備え、前記基板搭載部の前記基板把持手段下に通気孔を備えたことを特徴とするものである。
請求項2に記載の発明は、基板を載置する基板搭載部と、前記基板搭載部に設けられた回転支持部と、前記回転支持部を中心に前記基板の半径方向に回転可能な基板把持手段と、を備え、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記基板を把持する基板把持装置において、前記基板把持手段は、第1把持部と第2把持部とを備えかつ前記回転支持部回りに回転する動きを制限されており、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記制限に至った状態において前記基板の下端に接触する前記第1把持部と前記基板の上端に接触する前記第2把持部によって、前記基板の上下端部のみを把持することを特徴とするものである。
また、請求項3に記載の発明によると、基板把持部と基板との接触面積が減少し、基板把持部と基板が接触する際の基板へのパーティクル付着の可能性が減少する。
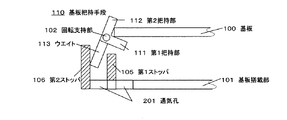
図において、100は、シリコンウエハ又はガラス基板等の基板である。
101は、基板100を搭載するための基板搭載部であり、半導体搬送ロボットにおけるエンドエフェクタやプリアライナの回転テーブル等に相当する。基板搭載部は、後述する基板把持機構を介して基板100を搭載するものである。
102は、基板搭載部101に設けられた軸受け等の回転支持部である。
110は、第1把持部111と第2把持部112とウエイト113からなる基板把持手段である。基板把持手段110は、回転支持部102を中心に基板半径方向(図1の矢印方向)に回転することができる。基板把持手段110を構成する第1把持部は、基板の下端部に接触し、第2把持部は、基板の上端部に接触する。また、ウエイト113は、回転支持部102よりも基板半径方向の外側に設けられ、基板把持部110を開放状態に維持するように、回転支持部102回りのモーメントを発生させる。
105は、ウエイト113が接触する第1ストッパであり、106は、ウエイト113が接触する第2ストッパである。第1ストッパ105は、基板把持手段110が基板開放状態(図1(a))にあるときに基板把持手段の動きを制限するものであり、第2ストッパは、基板把持手段110が基板把持状態(図1(b))にあるときに基板把持手段の動きを制限するものである。
また、ウエイト113がストッパの役割を兼ねる点が異なっている。
まず、基板が載置されていない状態では、基板把持部110は、図1(a)の状態にある。ウエイト113の重心は回転支持部102よりも基板半径方向の外側に設けられ、基板把持部110を開放状態に維持するように、回転支持部102回りのモーメントを発生させている。しかし、第1ストッパ105に接触することにより、基板把持手段110は、基板開放状態で静止することとなる。
次に、図示しない装置によって基板が基板把持手段の第1把持部111に載置されると、基板自身の自重により、ウエイト113が発生するモーメントに打ち勝つような、基板把持手段を把持状態に至らしめる回転モーメントが回転支持部102回りに発生する。すなわち、基板100載置の過程においては、徐々に基板把持手段110が回転支持部102回りに回転していく。
最後に、図1(b)に示すように、ウエイト113が第2ストッパに接触し、基板100の載置が完全に完了する。
この状態では、基板100は、第1把持部111および第2把持部102によって、基板上下端部がそれぞれ把持される。
ここで、ウエイト113が第1および第2ストッパと接触する場所は、基板から離れた場所であるため、パーティクルが基板に付着しにくい構造となっている。
図において、201は、基板搭載部101に設けられた通気孔であり、基板把持手段の下方に位置している。
その他の部分については、実施例1と同様であるので、説明は省略する。
実施例1記載の基板搬送・処理装置は、基板把持動作中は、基板と第1、第2把持部との接触、回転支持部と基板把持部との回転摺動、ウエイトとストッパとの接触等の原因により、パーティクルが発生する。しかし、従来と比較して、その発生場所は基板からはなれているために、基板が汚染される可能性は低いものとなっているものの、装置上方からのダウンフローが基板搭載部で巻き返され、発生したパーティクルが基板に付着してしまう恐れがある。
そこで、本発明においては、基板搭載部101の基板把持手段下にダウンフローが流入する通気孔を設け、発生したパーティクルが巻き返されることなく、ダウンフローと共に通気孔から流出するようになっている。
実施例1、2においては、基板が載置されると、ウエイトがストッパに勢い良く衝突するため、このときにパーティクルが発生する恐れがある。そこで、本実施例においては、ウエイトがストッパに勢い良く衝突しないようにするものである。
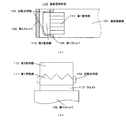
図において、301は、基板把持手段110に設けられた磁性体であり、本実施例においては、マグネットである。
302は、マグネット301に磁気を印加するための磁気発生手段であり、本実施例においては、ソレノイドである。ソレノイドは第2ストッパ106に設けられている。
303は、基板把持手段110状態を検出するための位置検出手段であり、本実施例においては、反射型光学式位置検出センサである。本実施例においては、基板裏面の位置を検出することで基板把持手段110の開閉状態を検出している。なお、位置検出手段は、基板裏面の位置を検出する以外にも、第1把持部111の位置や、ウエイト113の位置等を検出しても良く、結果的に基板把持手段の開閉状態が検出できるものであれば、任意のもので構わない。
まず、基板把持状態における基板位置を予め測定しておく。
次に、図示しない装置によって基板が基板把持手段の第1把持部111に載置されると、基板自身の自重により、ウエイト113が発生するモーメントに打ち勝つような、基板把持手段を把持状態に至らしめる回転モーメントが回転支持部102回りに発生する。すなわち、基板100載置の過程においては、徐々に基板把持手段110が回転支持部102回りに回転していく。
このとき、基板の位置は反射型光学式位置検出センサによって、監視されている。
次に、徐々に基板把持手段110が回転支持部102回りに回転していくに従い、基板位置は徐々に降下していくので、その位置に応じて、ソレノイド302に電流を流す。
ソレノイド302に電流を流すと、発生した磁気により、基板把持手段110に設けられたマグネット301に反発力が発生する。すると、基板把持手段を把持状態に至るのを阻害するようなモーメントが回転支持部102回りに発生する。
基板位置に応じて電流を流す際には、基板が離れている時は大きな電流を流し、基板が下降するにつれ、その電流を小さくするような種々の制御方法が考えられる。
なお、ソレノイドを第1ストッパ105に設けるような場合には、吸引力を発生させるべく、マグネットを吸引力が発生する向きに配置するか、磁性体をケイ素鋼板等で構成すればよい。すなわち、ソレノイドの設置場所により、吸引力を発生させるか、反発力を発生させるかを選択すればよい。
最後に、基板把持状態に至ったことは事前の基板位置の測定からわかるので、その基板位置を反射型光学式位置検出センサが検出すると、ソレノイドに電流を流すのを止める。すなわち基板の自重のみで基板は把持されることとなる。ただし、このとき、より安定的な把持が必要な時は、マグネットに吸引力を発生するような方向に電流を流し、確実に基板を把持することもできる。
その他の部分は実施例1〜3と同様であるので、説明は省略する。
実施例1及至3においては、または従来の基板把持手段であっても基板把持手段の基板接触面にパーティクルが付着している可能性がある。この状態のまま基板を把持すると、基板裏面にパーティクルが付着する恐れがある。
そこで、本実施例においては、基板裏面へのパーティクル付着の可能性を減少させるようにするものである。
図4において、第1把持部111は櫛歯状の凹凸を有するものである。本実施例においては、凹凸部は1組(つまりコの字型)であるが、複数であっても構わない。また、凸部の形状が角型形状であっても、先端を丸くした形状であっても、三角形状であっても、結果的に基板把持部と基板との接触面積が減少するものであれば、任意の形状で構わない。
まず、実施例1のとおり、基板が載置されていない状態では、基板把持部110は、図1(a)の状態にあり、図示しない装置によって基板が基板把持手段の第1把持部111に載置される。このとき、基板100はまず基板把持部110の第1把持部111に載置されるのであり、基板110の裏面と第1把持部111の上面が面で接触することになる。つまりこのときの第1把持部111の上面と基板100の裏面の接触面積が最大となる。その後、基板110自身の自重によって図1(b)の状態になると、接触面積は最小となるのである。
実施例3では、基板100が基板把持手段110に載置された瞬間の接触面積を小さくするために、基板把持部110の第1把持部の形状をコの字型にするものである。
その他の部分は実施例1〜4と同様であるので、説明は省略する。
実施例1及至4においては、または従来の基板把持部であっても基板把持手段110の第1把持部111の基板接触面にはパーティクルが付着している可能性がある。この状態のまま基板100を把持すると、基板裏面にパーティクルが付着する恐れがある。
そこで、本実施例においては、基板裏面へのパーティクル付着の可能性を減少させるために、基板把持手段110の基板接触面である第1把持部111にパーティクル付着の可能性を減少させるものである。
図5(b)において、第1把持部111の断面形状は山谷の形状を有するものである。本実施例においては、3つの山谷の形状を構成しているが、山谷部分がより多い数であっても、少ない数であっても構わない。また、本実施例においては、三角形状の山谷形状としているがこの形状がいかなる形状であっても、結果的に基板把持部と基板との接触面積が減少するものであれば、任意の形状で構わない。
動作については、実施例4と同様であるため、説明は省略する。
102 回転支持部
110 基板把持手段
111 第1把持部
112 第2把持部
113 ウエイト
201 通気孔
301 マグネット
302 ソレノイド
303 光学式反射型位置検出センサ
Claims (2)
- 基板を載置する基板搭載部と、前記基板搭載部に設けられた回転支持部と、前記回転支持部を中心に前記基板の半径方向に回転可能な基板把持手段と、を備え、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記基板を把持する基板把持装置において、
前記基板把持手段は、前記基板に接触する第1把持部と第2把持部とウエイトとを備え、前記基板搭載部は、前記基板把持手段が前記基板を把持する位置および開放する位置で、それぞれ前記ウエイトが当接するストッパを備え、前記基板搭載部の前記基板把持手段下に通気孔を備えたことを特徴とする基板把持装置。 - 基板を載置する基板搭載部と、前記基板搭載部に設けられた回転支持部と、前記回転支持部を中心に前記基板の半径方向に回転可能な基板把持手段と、を備え、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記基板を把持する基板把持装置において、
前記基板把持手段は、第1把持部と第2把持部とを備えかつ前記回転支持部回りに回転する動きを制限されており、前記基板の自重により前記基板把持手段が前記回転支持部回りに回転して前記制限に至った状態において前記基板の下端に接触する前記第1把持部と前記基板の上端に接触する前記第2把持部によって、前記基板の上下端部のみを把持することを特徴とする基板把持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006039116A JP4873129B2 (ja) | 2006-02-16 | 2006-02-16 | 基板把持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006039116A JP4873129B2 (ja) | 2006-02-16 | 2006-02-16 | 基板把持装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007220868A JP2007220868A (ja) | 2007-08-30 |
| JP2007220868A5 JP2007220868A5 (ja) | 2009-01-29 |
| JP4873129B2 true JP4873129B2 (ja) | 2012-02-08 |
Family
ID=38497821
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006039116A Expired - Fee Related JP4873129B2 (ja) | 2006-02-16 | 2006-02-16 | 基板把持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4873129B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9732416B1 (en) | 2007-04-18 | 2017-08-15 | Novellus Systems, Inc. | Wafer chuck with aerodynamic design for turbulence reduction |
| JP4819010B2 (ja) * | 2007-09-04 | 2011-11-16 | 東京エレクトロン株式会社 | 処理装置、処理方法および記憶媒体 |
| US8419964B2 (en) | 2008-08-27 | 2013-04-16 | Novellus Systems, Inc. | Apparatus and method for edge bevel removal of copper from silicon wafers |
| US8172646B2 (en) * | 2009-02-27 | 2012-05-08 | Novellus Systems, Inc. | Magnetically actuated chuck for edge bevel removal |
| JP5902085B2 (ja) * | 2009-08-07 | 2016-04-13 | アプライド マテリアルズ インコーポレイテッドApplied Materials,Incorporated | 処理チャンバ内で基板を位置決めするための装置及び処理チャンバ内で基板をセンタリングするための方法 |
| JP2013045912A (ja) * | 2011-08-25 | 2013-03-04 | Tokyo Electron Ltd | 搬送機構 |
| JP2015105167A (ja) * | 2013-11-29 | 2015-06-08 | 日本板硝子株式会社 | ガラス板保持具及びガラス板搬送装置 |
| CN105225995B (zh) * | 2014-06-30 | 2018-03-09 | 北京北方华创微电子装备有限公司 | 晶片传输装置和工艺腔室 |
| CN111199909B (zh) * | 2018-11-19 | 2023-06-16 | 北京北方华创微电子装备有限公司 | 一种基座组件和半导体加工设备 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06155213A (ja) * | 1992-11-19 | 1994-06-03 | Hitachi Ltd | 回転機構 |
| JPH09232406A (ja) * | 1996-02-26 | 1997-09-05 | Sumitomo Sitix Corp | ウェーハ移し換え治具 |
| JPH1074816A (ja) * | 1996-08-29 | 1998-03-17 | Hitachi Techno Eng Co Ltd | ウェファ搬送装置 |
| JP2002368066A (ja) * | 2001-06-06 | 2002-12-20 | Tokyo Electron Ltd | 処理装置 |
-
2006
- 2006-02-16 JP JP2006039116A patent/JP4873129B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007220868A (ja) | 2007-08-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4873129B2 (ja) | 基板把持装置 | |
| JP5581713B2 (ja) | ウェーハ表面測定装置 | |
| TWI226097B (en) | Method and apparatus for transferring a thin plate, and manufacturing method of substrate using the same | |
| US9111976B2 (en) | Transfer system | |
| JP6276053B2 (ja) | プローバ | |
| JP6545519B2 (ja) | 基板搬送ロボットおよび基板検出方法 | |
| KR102233207B1 (ko) | 기판 파지 기구, 기판 반송 장치 및 기판 처리 시스템 | |
| TW202022974A (zh) | 運輸系統 | |
| JP6842300B2 (ja) | 基板位置アライナ | |
| KR20200032042A (ko) | 기판 보유 지지 장치 | |
| JP4299104B2 (ja) | ウエーハ搬送機構 | |
| JPH11354614A (ja) | 基板姿勢制御装置及び基板姿勢制御方法 | |
| JP2004119554A (ja) | 薄板状物の把持装置及びそれを具えた製造設備 | |
| JP2014135390A (ja) | 基板搬送装置、基板検査装置及び基板搬送方法 | |
| JP2009160711A (ja) | エンドエフェクタ及びそれを備えた搬送装置 | |
| JP2006332460A (ja) | ウェーハの搬送装置 | |
| JP5384270B2 (ja) | ローダ | |
| JP4015762B2 (ja) | 半導体ウェーハの厚さ測定装置 | |
| JP2009012916A (ja) | 搬送システム | |
| CN110828330A (zh) | 基板处理装置和基板处理方法 | |
| JP7402946B2 (ja) | ウエハ位置決め装置 | |
| JP2014130899A (ja) | 基板搬送装置、基板検査装置及び基板搬送方法 | |
| WO2008079239A2 (en) | Methods and apparatus for sensing substrates in carriers | |
| JP2012220617A (ja) | プロキシミティ露光装置、及びプロキシミティ露光装置のマスク搬送方法 | |
| TWI479588B (zh) | 校準裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100903 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100908 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110408 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110428 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111108 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |