JP4813630B2 - 内視鏡装置 - Google Patents
内視鏡装置 Download PDFInfo
- Publication number
- JP4813630B2 JP4813630B2 JP2011524035A JP2011524035A JP4813630B2 JP 4813630 B2 JP4813630 B2 JP 4813630B2 JP 2011524035 A JP2011524035 A JP 2011524035A JP 2011524035 A JP2011524035 A JP 2011524035A JP 4813630 B2 JP4813630 B2 JP 4813630B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment instrument
- distal
- treatment
- endoscope
- peripheral surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/00296—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means mounted on an endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
- A61B2017/293—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft with means preventing relative rotation between the shaft and the actuating rod
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Ophthalmology & Optometry (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
Description
本発明の第1の実施形態について図1乃至図4を参照して説明する。
次に、第2の実施形態について、図5及び図6を参照して説明する。なお、第1の実施形態と同一の部分及び同一の機能を有する部分については同一の符号を付して、その説明は省略する。
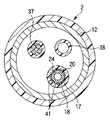
なお、第1及び第2の実施形態の変形例として、図7に示すように、内周面部17の先端方向側の部位に、内周側に向けて突出する複数の第1の凸部41が、処置具55の処置具本体24の先端方向側の部位の外周面に外周側に向けて突出する複数の第2の凸部51が、設けられてもよい。この内視鏡装置1では、処置具挿通路18に処置具55が挿通された状態で、第1の凸部41は第2の凸部51と接触している。このような構成にすることにより、処置具本体24が内視鏡2に対して軸回り方向に回転する際に、第1の凸部41と第2の凸部51との接触部で、処置具本体24の回転方向とは反対方向に摩擦力が付与される。すなわち、第1の凸部41及び第2の凸部51が、第1の凸部41(内周面部17の先端方向側の部位)と第2の凸部51(処置具本体24の先端方向側の部位の外周面)との接触部に摩擦力を付与する摩擦力付与部となっている。
次に、第3の実施形態について、図8を参照して説明する。なお、第1の実施形態と同一の部分及び同一の機能を有する部分については同一の符号を付して、その説明は省略する。
上述の実施形態では、内周面部17の先端方向側の部位から内周側に向けて突出する複数の第1の凸部41、及び、処置具本体24の先端方向側の部位の外周面から外周側に向けて突出する複数の第2の凸部51の少なくともいずれか一方、又は、処置具本体24の先端方向側の部位の外周面に設けられる膨張可能なバルーン61により、摩擦力付与部が構成されている。しかし、本発明の内視鏡装置1では、処置具本体24が内視鏡2に対して軸回り方向に回転する際に、内周面部17の先端方向側の部位と処置具本体24の先端方向側の部位の外周面との接触部に摩擦力を付与する摩擦力付与部が設けられていればよい。
Claims (5)
- 内視鏡と、
長手方向に延設される処置具本体と、前記処置具本体より先端方向側に設けられる先端処置部と、前記処置具本体と前記先端処置部との間に設けられ、前記先端処置部を前記処置具本体に対して軸回り方向に回転させる回転関節部とを備える処置具と、
前記内視鏡又は前記内視鏡とは別体の管状体に設けられ、前記処置具が挿通される処置具挿通路を規定する内周面部と、
前記処置具本体が前記内視鏡に対して軸回り方向に回転する際に、前記内周面部の先端方向側の部位と前記処置具本体の先端方向側の部位の外周面との接触部に摩擦力を付与する摩擦力付与部と、
を具備する内視鏡装置。 - 前記摩擦力付与部は、前記内周面部の前記先端方向側の部位、及び、前記処置具本体の前記先端方向側の部位の前記外周面の少なくともいずれか一方に設けられている請求項1の内視鏡装置。
- 前記摩擦力付与部は、前記内周面部の前記先端方向側の部位から内周側に向けて突出する凸部を備える請求項2の内視鏡装置。
- 前記摩擦力付与部は、前記処置具本体の前記先端方向側の部位の前記外周面から外周側に向けて突出する凸部を備える請求項2の内視鏡装置。
- 前記摩擦力付与部は、前記処置具本体の前記先端方向側の部位の前記外周面に設けられる膨張可能なバルーンを備える請求項2の内視鏡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011524035A JP4813630B2 (ja) | 2010-02-26 | 2010-11-29 | 内視鏡装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010042571 | 2010-02-26 | ||
| JP2010042571 | 2010-02-26 | ||
| JP2011524035A JP4813630B2 (ja) | 2010-02-26 | 2010-11-29 | 内視鏡装置 |
| PCT/JP2010/071241 WO2011104960A1 (ja) | 2010-02-26 | 2010-11-29 | 内視鏡装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4813630B2 true JP4813630B2 (ja) | 2011-11-09 |
| JPWO2011104960A1 JPWO2011104960A1 (ja) | 2013-06-17 |
Family
ID=44506397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011524035A Active JP4813630B2 (ja) | 2010-02-26 | 2010-11-29 | 内視鏡装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20110288371A1 (ja) |
| EP (1) | EP2401952B1 (ja) |
| JP (1) | JP4813630B2 (ja) |
| CN (1) | CN102413755B (ja) |
| WO (1) | WO2011104960A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107072493B (zh) * | 2015-06-05 | 2019-01-29 | 奥林巴斯株式会社 | 插入装置 |
| WO2017209695A1 (en) * | 2016-06-01 | 2017-12-07 | Endomaster Pte. Ltd. | Endoscopy system components |
| KR101922927B1 (ko) * | 2016-12-26 | 2018-11-28 | 가톨릭관동대학교 산학협력단 | 내시경용 처치구 |
| WO2020049713A1 (ja) * | 2018-09-07 | 2020-03-12 | オリンパス株式会社 | 内視鏡システム |
| JP7744927B2 (ja) * | 2020-11-30 | 2025-09-26 | 富士フイルム株式会社 | 内視鏡処置具、及び内視鏡装置 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3628742B2 (ja) * | 1995-02-22 | 2005-03-16 | オリンパス株式会社 | 医療用マニピュレータ |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| JP2001327460A (ja) | 2000-05-18 | 2001-11-27 | Olympus Optical Co Ltd | 内視鏡装置 |
| US7766894B2 (en) * | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| US7338513B2 (en) * | 2003-10-30 | 2008-03-04 | Cambridge Endoscopic Devices, Inc. | Surgical instrument |
| EP1740084A2 (en) * | 2004-04-15 | 2007-01-10 | Wilson-Cook Medical Inc. | Endoscopic surgical access devices and methods of articulating an external accessory channel |
| US20080021274A1 (en) * | 2005-01-05 | 2008-01-24 | Avantis Medical Systems, Inc. | Endoscopic medical device with locking mechanism and method |
| EP1707153B1 (en) * | 2005-03-29 | 2012-02-01 | Kabushiki Kaisha Toshiba | Manipulator |
| JP4827440B2 (ja) * | 2005-05-31 | 2011-11-30 | オリンパスメディカルシステムズ株式会社 | 粘膜下層剥離処置具及びそのシステム |
| WO2006129726A1 (ja) * | 2005-05-31 | 2006-12-07 | Olympus Medical Systems Corp. | 粘膜剥離装置、および粘膜剥離方法 |
| JP4425223B2 (ja) * | 2006-02-17 | 2010-03-03 | Hoya株式会社 | 内視鏡用高周波ナイフ |
| JP4441496B2 (ja) * | 2006-02-20 | 2010-03-31 | Hoya株式会社 | 内視鏡用バイポーラ型高周波処置具 |
| CN101370435B (zh) * | 2006-02-21 | 2010-11-17 | 奥林巴斯医疗株式会社 | 内窥镜系统和医疗器械 |
| US7918783B2 (en) * | 2006-03-22 | 2011-04-05 | Boston Scientific Scimed, Inc. | Endoscope working channel with multiple functionality |
| JP5160050B2 (ja) * | 2006-06-07 | 2013-03-13 | オリンパスメディカルシステムズ株式会社 | 内視鏡用処置具 |
| US9421071B2 (en) * | 2006-12-01 | 2016-08-23 | Boston Scientific Scimed, Inc. | Direct drive methods |
| JP5237608B2 (ja) * | 2007-10-25 | 2013-07-17 | オリンパスメディカルシステムズ株式会社 | 医療装置 |
| US20090131752A1 (en) * | 2007-11-19 | 2009-05-21 | Chul Hi Park | Inflatable artificial muscle for elongated instrument |
| JP5114179B2 (ja) | 2007-12-17 | 2013-01-09 | Hoya株式会社 | 内視鏡用バイポーラ型高周波処置具 |
| US8435170B2 (en) * | 2008-01-11 | 2013-05-07 | Boston Scientific Scimed, Inc. | Positioning system for securing a treatment instrument at the end of a medical device |
| JP5114333B2 (ja) * | 2008-08-01 | 2013-01-09 | Hoya株式会社 | 内視鏡用処置具 |
| JP2011000326A (ja) * | 2009-06-19 | 2011-01-06 | Ritsumeikan | 曲げ駆動装置及びこれを備えた内視鏡、並びに内視鏡用の曲げ駆動装置 |
-
2010
- 2010-11-29 EP EP10846623.6A patent/EP2401952B1/en not_active Not-in-force
- 2010-11-29 WO PCT/JP2010/071241 patent/WO2011104960A1/ja not_active Ceased
- 2010-11-29 CN CN201080019579.6A patent/CN102413755B/zh active Active
- 2010-11-29 JP JP2011524035A patent/JP4813630B2/ja active Active
-
2011
- 2011-06-16 US US13/162,197 patent/US20110288371A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN102413755A (zh) | 2012-04-11 |
| US20110288371A1 (en) | 2011-11-24 |
| CN102413755B (zh) | 2015-07-01 |
| EP2401952B1 (en) | 2016-12-28 |
| EP2401952A1 (en) | 2012-01-04 |
| JPWO2011104960A1 (ja) | 2013-06-17 |
| WO2011104960A1 (ja) | 2011-09-01 |
| EP2401952A4 (en) | 2012-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4772446B2 (ja) | 内視鏡挿入補助具及び内視鏡装置 | |
| JP5336760B2 (ja) | 内視鏡システム | |
| JP5563852B2 (ja) | バルーン付きオーバーチューブ、および内視鏡システム | |
| EP1892009B1 (en) | Endoscope treatment instrument | |
| JP4728075B2 (ja) | 内視鏡システム | |
| JPWO2014084135A1 (ja) | 内視鏡装置 | |
| JP4813630B2 (ja) | 内視鏡装置 | |
| JP2014068817A (ja) | 内視鏡用状態視認装置 | |
| JP6218992B2 (ja) | 挿入装置 | |
| JP2007029556A (ja) | 医療装置用挿入補助具 | |
| JP2017213367A5 (ja) | 内視鏡の処置具駆動ホイールハウジング | |
| JP6099829B2 (ja) | 補助具及び内視鏡システム | |
| JP2010516325A (ja) | 結腸内視術のための診断用または治療用ツール | |
| CN104394752A (zh) | 插拔辅助器械 | |
| WO2007096950A1 (ja) | 内視鏡システム、及び医療器具 | |
| JP2007268137A (ja) | 大腸用内視鏡装置 | |
| JP2007307241A (ja) | 回転自走式内視鏡、及び回転自走式内視鏡装置 | |
| JP2025533673A (ja) | 医用装置の挿管のためのシステムおよび方法 | |
| JP4153731B2 (ja) | 電子走査式超音波内視鏡 | |
| JP5030449B2 (ja) | 内視鏡挿入補助具 | |
| JP3787724B2 (ja) | 内視鏡装置 | |
| JP4885634B2 (ja) | 回転自走式内視鏡 | |
| JP2005204995A (ja) | 内視鏡用処置具及び内視鏡用処置装置並びに内視鏡処置具システム | |
| JP2005342401A (ja) | 内視鏡及び内視鏡処置システム | |
| JP2005230087A (ja) | オーバチューブ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110802 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110824 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4813630 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140902 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140902 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |