JP4730073B2 - 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム - Google Patents
永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム Download PDFInfo
- Publication number
- JP4730073B2 JP4730073B2 JP2005348614A JP2005348614A JP4730073B2 JP 4730073 B2 JP4730073 B2 JP 4730073B2 JP 2005348614 A JP2005348614 A JP 2005348614A JP 2005348614 A JP2005348614 A JP 2005348614A JP 4730073 B2 JP4730073 B2 JP 4730073B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- motor
- axis
- permanent magnet
- magnet synchronous
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/16—Estimation of constants, e.g. the rotor time constant
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Description
(2)d軸(磁束)成分の電圧指令値と電圧検出値の偏差から、モータ抵抗値を同定する。
(3)上記(2)で同定したモータの抵抗値が制限値を超えた場合は、d軸成分の電圧偏差から、q軸インダクタンスを同定する動作に切替える。
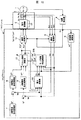
図1は、本発明の一実施例である永久磁石同期モータのベクトル制御装置の構成例を示す。1は永久磁石同期モータ、2は3相交流の電圧指令値Vu*,Vv*,Vw* に比例した電圧を出力する電力変換器、21は直流電源、3は3相交流電流Iu,Iv,Iwを検出できる電流検出器、4は電動機の位置θを検出できる位置検出器、5は位置検出値θcから周波数演算値ω1 *を演算する周波数演算部、6は3相交流の電流検出値Iuc,Ivc,Iwcと位置検出値θcからd軸およびq軸の電流検出値Idc,Iqcを出力する座標変換部、7は第1のd軸電流指令値Id* を設定するd軸電流指令設定部、8は第1のd軸電流指令値Id* とd軸電流検出値Idcの偏差に応じて、中間的な第2の電流指令値Id**を出力するd軸電流指令演算部、9は上位から与えられる第1のq軸電流指令値Iq* とq軸電流検出値Iqcの偏差に応じて、中間的な第2のq軸電流指令値Iq**を出力するq軸電流指令演算部、10は電圧指令値Vdc*,Vqc*と電流検出値Idc,
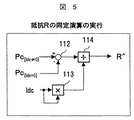
Iqcより、永久磁石同期モータ1の無効電力と有効電力を演算し、無効電力演算値Pcと有効電力演算値Qcを出力する電力演算部、11は無効電力Pc,有効電力Qcと電流検出値Idc,Iqcより、永久磁石同期モータ1の、抵抗の同定値R^、d軸およびq軸インダクタンスの同定値Ld^,Lq^、誘起電圧係数の同定値Ke^を演算するモータ定数同定演算部、12は中間的な第2のd軸およびq軸の電流指令値Id**,Iq**と周波数演算値ω1 *およびモータ定数の設定値(R*,Ld*,Lq*,Ke*)、あるいはモータ定数同定演算部11の出力値である(R^,Ld^,Lq^,Ke^)を用いて、電圧指令値Vdc*,Vqc*を出力するベクトル制御演算部、13は電圧指令値Vdc*,Vqc*と位置検出値θcから3相交流の電圧指令値Vu*,Vv*,Vw* を出力する座標変換部である。

Ke:誘起電圧係数、*:設定値である。
Id,Iqを電流検出値Idc,Iqc,モータ周波数ω1 を周波数演算値ω1 *とすると、
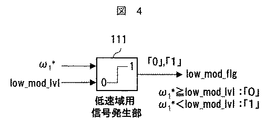
(あるいは「負」)の少なくとも2段階に設定する。
Keを同定する。
第1の実施例では、モータ定数同定演算部11の出力値 (R^,Ld^,Lq^,Ke^)を用いて、ベクトル制御演算部12のモータ定数を設定する方式であったが、11の出力値を用いて第2のd軸およびq軸の電流指令演算部8a,9aの制御ゲインの修正にも適用することができる。
図12は、本発明の他の実施例を示す。本実施例は、上位から与えられる電流指令値と電流検出値の偏差で、ベクトル制御演算の出力値Vdc*,Vqc*を補正する永久磁石同機モータのベクトル制御装置である。
第3の実施例では、モータ定数同定演算部11の出力値(R^,Ld^,Lq^,Ke^)を用いて、ベクトル制御演算部12′のモータ定数を設定する方式であったが、11の出力値を用いて、d軸およびq軸の電流指令演算部8c,9cの制御ゲインの修正にも適用することができる。
q1)を修正すれば、高精度,高応答なトルク制御系を実現することができる。
Kp_q1:q軸電流制御演算用の比例ゲイン、Ki_q1:積分ゲイン、ωc_acr :電流制御応答角周波数[rad/s]である。
第1の実施例では、高価な電流検出器3で3相の交流電流Iu〜Iwを検出する方式であったが、安価な電流検出を行う制御装置においても適用することができる。
図15を用いて本発明をモジュールに適用した例について説明する。本実施例は、第6実施例の実施形態を示すものである。
これまでの実施例では、モータ定数をモータ定数同定演算部11を演算し、ベクトル制御演算部のモータ定数を同定していたが、モータ定数をモータ定数同定演算部11で演算し、それを表示することも考えられる。
Claims (12)
- d軸およびq軸の電流指令値および電流検出値,周波数演算値およびモータ定数の設定値とにより、電力変換器の出力電圧値を制御し、前記電力変換器の出力電圧値と電流検出値とから求めた有効電力あるいは無効電力と、周波数演算値および電流検出値を用いて、前記モータ定数を同定する永久磁石同期モータのベクトル制御装置であって、
低速域では、d軸電流指令値を「正」又は「負」と、「ゼロ」との少なくとも2段階に設定する区間を設け、d軸電流指令値が、「正」又は「負」の区間における有効電力の絶対値から、「ゼロ」の区間における有効電力の絶対値を減算し、該減算値を、「正」もしくは「負」のd軸電流検出値を2乗した値で、除算演算することにより、前記モータの抵抗値を同定することを特徴とする永久磁石同期モータのベクトル制御装置。 - d軸およびq軸の電流指令値および電流検出値,周波数演算値およびモータ定数の設定値とにより、電力変換器の出力電圧値を制御し、前記電力変換器の出力電圧値と電流検出値とから求めた有効電力あるいは無効電力と、周波数演算値および電流検出値を用いて、前記モータ定数を同定する永久磁石同期モータのベクトル制御装置であって、
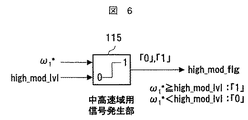
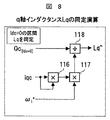
中高速域では、d軸電流指令値を「零」に設定し、無効電力の絶対値を、周波数演算値とq軸電流検出値を2乗した値との乗算値で、除算演算することにより、前記モータのq軸インダクタンス値を同定することを特徴とする永久磁石同期モータのベクトル制御装置。 - d軸およびq軸の電流指令値および電流検出値,周波数演算値およびモータ定数の設定値とにより、電力変換器の出力電圧値を制御し、前記電力変換器の出力電圧値と電流検出値とから求めた有効電力あるいは無効電力と、周波数演算値および電流検出値を用いて、前記モータ定数を同定する永久磁石同期モータのベクトル制御装置であって、
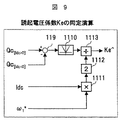
中高速域では、d軸電流指令値を「正」と「負」の少なくても2段階に設定する区間を設け、d軸電流指令値が、「正」の区間における無効電力の絶対値から、「負」の区間における無効電力の絶対値を減算し、該減算値を、周波数演算値とd軸電流検出値との乗算値で、除算演算することにより、モータの誘起電圧係数値を同定することを特徴とする永久磁石同期モータのベクトル制御装置。 - d軸およびq軸の電流指令値および電流検出値,周波数演算値およびモータ定数の設定値とにより、電力変換器の出力電圧値を制御し、前記電力変換器の出力電圧値と電流検出値とから求めた有効電力あるいは無効電力と、周波数演算値および電流検出値を用いて、前記モータ定数を同定する永久磁石同期モータのベクトル制御装置であって、
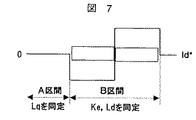
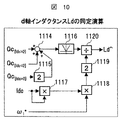
中高速域では、d軸電流指令値を「正」と「負」および「ゼロ」の少なくても3段階に設定する区間を設け、
d軸電流指令値が、「正」の区間における無効電力の絶対値と「負」の区間における無効電力の絶対値および「ゼロ」の区間における無効電力の絶対値の2倍相当とを加算し、該加算値を、周波数演算値とd軸電流検出値を2乗した値との乗算値の2倍相当で、除算演算することにより、モータのd軸インダクタンス値を同定することを特徴とする永久磁石同期モータのベクトル制御装置。 - 請求項1ないし4のいずれかにおいて、
電力変換器の出力電圧値は、d軸およびq軸の電流指令値と電流検出値から演算した第2の電流指令値,電動機定数および周波数演算値とから、演算することを特徴とする永久磁石同期モータのベクトル制御装置。 - 請求項1ないし4のいずれかにおいて、
電力変換器の出力電圧値は、第1のd軸およびq軸の電流指令値,周波数演算値およびモータ定数とを用いて演算されたベクトル制御演算部の出力値と、モータの電流検出値が前記第1の電流指令値に追従するように制御された電流制御演算部の出力値との加算値であることを特徴とする永久磁石同期モータのベクトル制御装置。 - 請求項1ないし4のいずれかにおいて、
同定演算により得られたモータ定数を用いて、電力変換器の出力電圧値の演算に用いるモータ定数の設定値を修正することを特徴とする永久磁石同期モータのベクトル制御装置
。 - 請求項5において、
同定演算により得られたモータ定数を用いて、第2の電流指令値を演算する制御ゲインを修正することを特徴とする永久磁石同期モータのベクトル制御装置。 - 請求項6において、
同定演算により得られたモータ定数を用いて、電流制御演算部の出力値を演算する制御ゲインを修正することを特徴とする永久磁石同期モータのベクトル制御装置。 - 請求項1ないし4のいずれかにおいて、
前記電流検出値は、電力変換器の入力母線直流電流検出値からモータ電流を再現した電流であることを特徴とする永久磁石同期電動機のベクトル制御装置。 - 請求項1ないし10のいずれか一つに記載の永久磁石同期モータのベクトル制御装置と前記電力変換器を有するインバータモジュールにおいて、
前記電力変換器の出力電圧値と電流検出値から求めた有効電力あるいは無効電力と、周波数演算値および電流検出値とを用いて、
前記モータ定数を同定することを特徴とするインバータモジュール。 - 請求項1ないし10のいずれか一つに記載の永久磁石同期モータのベクトル制御装置と表示装置とを有する永久磁石同期電動機モータ定数表示システムにおいて、
前記電力変換器の出力電圧値と電流検出値とから求めた有効電力あるいは無効電力と、周波数演算値および電流検出値を用いて、モータ定数を求めるモータ定数演算部を有し、前記モータ定数を表示装置で表示することを特徴とする永久磁石同期電動機モータ定数表示システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005348614A JP4730073B2 (ja) | 2005-12-02 | 2005-12-02 | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム |
| US11/606,976 US7521887B2 (en) | 2005-12-02 | 2006-12-01 | Vector controller for a permanent magnet synchronous motor, inverter module, and permanent magnet synchronous motor constant display system |
| CNB2006101636185A CN100530935C (zh) | 2005-12-02 | 2006-12-01 | 永磁同步电机的矢量控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005348614A JP4730073B2 (ja) | 2005-12-02 | 2005-12-02 | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007159212A JP2007159212A (ja) | 2007-06-21 |
| JP4730073B2 true JP4730073B2 (ja) | 2011-07-20 |
Family
ID=38118032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005348614A Expired - Fee Related JP4730073B2 (ja) | 2005-12-02 | 2005-12-02 | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7521887B2 (ja) |
| JP (1) | JP4730073B2 (ja) |
| CN (1) | CN100530935C (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7772721B2 (en) * | 2007-10-03 | 2010-08-10 | Qualcomm Incorporated | Method and apparatus for conserving energy stored in bypass capacitors during dynamic power collapse |
| JP5509538B2 (ja) * | 2008-05-12 | 2014-06-04 | 富士電機株式会社 | 永久磁石形同期電動機の制御装置 |
| JP5334524B2 (ja) * | 2008-10-20 | 2013-11-06 | 株式会社日立製作所 | 永久磁石同期モータの制御装置及びその制御方法 |
| US7804184B2 (en) * | 2009-01-23 | 2010-09-28 | General Electric Company | System and method for control of a grid connected power generating system |
| JP2011211815A (ja) * | 2010-03-30 | 2011-10-20 | Kokusan Denki Co Ltd | 永久磁石モータの制御装置 |
| JP5413400B2 (ja) * | 2011-04-20 | 2014-02-12 | 株式会社安川電機 | 交流電動機の制御装置 |
| CN103185839B (zh) * | 2011-12-30 | 2015-07-08 | 台达电子企业管理(上海)有限公司 | 永磁电机电感参数测量装置及其方法 |
| JP5778045B2 (ja) * | 2012-01-16 | 2015-09-16 | 日立アプライアンス株式会社 | 同期モータの駆動装置、及びこれを用いた冷凍装置、空気調和機、冷蔵庫、並びに同期モータの駆動方法 |
| US8848400B2 (en) * | 2012-02-15 | 2014-09-30 | General Electric Company | System and method for reactive power regulation |
| WO2014073031A1 (ja) * | 2012-11-06 | 2014-05-15 | パイオニア株式会社 | モータ制御装置及びモータ制御方法 |
| WO2014132395A1 (ja) * | 2013-02-28 | 2014-09-04 | 三菱電機株式会社 | 交流回転機の制御装置 |
| KR101493511B1 (ko) * | 2013-06-26 | 2015-02-16 | 포스코에너지 주식회사 | 계통 전압 이상에 따른 계통 연계 인버터의 과전류 억제장치 및 방법 |
| JP6197655B2 (ja) * | 2014-01-09 | 2017-09-20 | スズキ株式会社 | 永久磁石同期モータの制御装置 |
| JP6261396B2 (ja) * | 2014-03-13 | 2018-01-17 | 日本特殊陶業株式会社 | 永久磁石式同期モータのベクトル制御装置及び磁石磁束推定装置 |
| CN103997267B (zh) * | 2014-04-11 | 2016-05-11 | 浙江大学 | 一种开绕组永磁同步电机的串联补偿直接转矩控制方法 |
| JP6514969B2 (ja) * | 2015-06-24 | 2019-05-15 | 日本特殊陶業株式会社 | 永久磁石式同期モータのベクトル制御装置 |
| JP6233428B2 (ja) * | 2016-02-12 | 2017-11-22 | 株式会社安川電機 | モータ制御装置およびモータ制御方法 |
| JP6896032B2 (ja) * | 2016-04-26 | 2021-06-30 | 三菱電機株式会社 | モータ駆動装置、電気掃除機及びハンドドライヤー |
| JP6577665B2 (ja) * | 2016-04-26 | 2019-09-18 | 三菱電機株式会社 | モータ駆動装置、電気掃除機及びハンドドライヤー |
| JP6740265B2 (ja) * | 2018-02-16 | 2020-08-12 | ファナック株式会社 | パラメータ決定支援装置及びプログラム |
| JP7449204B2 (ja) * | 2020-09-09 | 2024-03-13 | 株式会社日立産機システム | 電力変換装置 |
| CN113489399B (zh) * | 2021-06-04 | 2024-02-20 | 江苏大学 | 永磁电机及其全工况功率因数最优、凸极率分布最优方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004297966A (ja) * | 2003-03-28 | 2004-10-21 | Hitachi Ltd | 交流電動機の制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3019653B2 (ja) * | 1993-03-12 | 2000-03-13 | 株式会社日立製作所 | 交流電動機の制御装置及び交流電動機の定数測定方法 |
| JP3951075B2 (ja) * | 1998-02-13 | 2007-08-01 | 株式会社安川電機 | 電動機の制御方法及び装置 |
| JP4225657B2 (ja) | 1999-11-15 | 2009-02-18 | 東洋電機製造株式会社 | 永久磁石型同期電動機の制御装置 |
| EP1378990B1 (en) * | 2001-03-02 | 2007-12-12 | Matsushita Electric Industrial Co., Ltd. | Electric motor controller |
| US7102305B2 (en) * | 2003-05-22 | 2006-09-05 | Toyoda Koki Kabushiki Kaisha | Apparatus and method for controlling motor |
| CN100417004C (zh) * | 2003-07-23 | 2008-09-03 | 松下电器产业株式会社 | 电动机控制设备及使用其的洗衣机和干燥机 |
-
2005
- 2005-12-02 JP JP2005348614A patent/JP4730073B2/ja not_active Expired - Fee Related
-
2006
- 2006-12-01 CN CNB2006101636185A patent/CN100530935C/zh not_active Expired - Fee Related
- 2006-12-01 US US11/606,976 patent/US7521887B2/en not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004297966A (ja) * | 2003-03-28 | 2004-10-21 | Hitachi Ltd | 交流電動機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1976212A (zh) | 2007-06-06 |
| US20070126391A1 (en) | 2007-06-07 |
| US7521887B2 (en) | 2009-04-21 |
| JP2007159212A (ja) | 2007-06-21 |
| CN100530935C (zh) | 2009-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4730073B2 (ja) | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム | |
| JP4881635B2 (ja) | 永久磁石モータのベクトル制御装置 | |
| JP4677852B2 (ja) | 永久磁石同期モータのベクトル制御装置 | |
| JP4655871B2 (ja) | 永久磁石同期電動機の弱め界磁ベクトル制御装置及びモジュール | |
| JP6367332B2 (ja) | インバータ制御装置及びモータ駆動システム | |
| JP4882645B2 (ja) | 永久磁石モータのインダクタンス同定制御装置及びインバータモジュール | |
| JP5130031B2 (ja) | 永久磁石モータの位置センサレス制御装置 | |
| JP5198332B2 (ja) | 永久磁石同期電動機のトルク制御装置 | |
| EP2779415A2 (en) | Motor control system to compensate for torque ripple | |
| JP4517793B2 (ja) | 永久磁石同期モータの制御装置及びモジュール | |
| JP6462241B2 (ja) | ファンモータ駆動装置及びブロア | |
| JP2011004506A (ja) | モータ制御装置 | |
| JP2010011564A (ja) | 永久磁石同期電動機の制御装置、及び電動機制御システム | |
| JP2008011631A (ja) | 永久磁石モータのベクトル制御装置及びインバータモジュール | |
| JP5267848B2 (ja) | モータ制御装置 | |
| JP3832443B2 (ja) | 交流電動機の制御装置 | |
| JP4771998B2 (ja) | 電動機の駆動装置 | |
| JP7151872B2 (ja) | 永久磁石同期機の制御装置 | |
| JP2008173006A (ja) | 交流電動機の制御装置 | |
| JP5150366B2 (ja) | ベクトル制御装置 | |
| JP2000037098A (ja) | 速度センサレスベクトル制御を用いた電力変換装置 | |
| JP2006230200A (ja) | 交流電動機の制御装置 | |
| JP6358834B2 (ja) | ベクトル制御装置、それを組み込んだインバータ及びそれを組み込んだインバータとモータとのセット装置 | |
| JP2020010566A (ja) | モータ制御装置 | |
| JP2004015858A (ja) | Pmモータの位置センサレス制御方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101214 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110404 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140428 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4730073 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140428 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |