JP4517793B2 - 永久磁石同期モータの制御装置及びモジュール - Google Patents
永久磁石同期モータの制御装置及びモジュール Download PDFInfo
- Publication number
- JP4517793B2 JP4517793B2 JP2004266164A JP2004266164A JP4517793B2 JP 4517793 B2 JP4517793 B2 JP 4517793B2 JP 2004266164 A JP2004266164 A JP 2004266164A JP 2004266164 A JP2004266164 A JP 2004266164A JP 4517793 B2 JP4517793 B2 JP 4517793B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- motor
- axis
- phase error
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001360 synchronised effect Effects 0.000 title claims description 27
- 238000004364 calculation method Methods 0.000 claims description 100
- 238000001514 detection method Methods 0.000 claims description 39
- 230000004907 flux Effects 0.000 claims 4
- 230000000694 effects Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 230000007423 decrease Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 238000004088 simulation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/04—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
- H02P21/26—Rotor flux based control
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
「モータ軸基準の回転位相値θ」との誤差値(以下、位相誤差値Δθ)を演算により推定し、この推定位相誤差値Δθcが「ゼロ」となるように周波数指令値ω1 *は調整され、
ω1 *を積分処理することで回転位相指令値θc*を作成している。
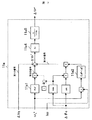
図1は、本発明の一実施例である永久磁石同機モータのベクトル制御装置の構成例を示す。
Iv,Iwの検出値Iuc,Ivc,Iwcと回転位相指令値θc* からd軸およびq軸の電流検出値Idc,Iqcを出力する座標変換部、8は上位から与えられる第1のd軸電流指令値Id* とd軸電流検出値Idcの偏差に応じて、第2のd軸電流指令値Id**を出力するd軸電流指令演算部、9は上位から与えられる第1のq軸電流指令値Iq* とq軸電流検出値Iqcの偏差に応じて、第2のd軸電流指令値Iq**を出力するq軸電流指令演算部、10はd軸およびq軸の第2の電流指令値Id**,Iq**と周波数指令値
ω1 *およびモータ1の電気定数を用いて、電圧指令値Vd**,Vq**を出力するベクトル制御演算部、11は第2のq軸電流指令値Iq**とq軸電流検出値Iqcと周波数指令値ω1 *と推定位相誤差値Δθcおよびモータ1の電気定数に基づいて、抵抗の設定誤差を含む電圧値ΔVr^を同定し、その同定値を用いて、比例あるいは積分演算を行い、抵抗の設定誤差電圧値ΔVr*を算出し、q軸電圧指令値Vq***と推定位相誤差値Δθcの演算部に出力する抵抗同定演算部、12は電圧指令値Vd**,Vq***と回転位相指令値θc*から3相交流の電圧指令値Vu*,Vv*,Vw*を出力する座標変換部である。

Ke:誘起電圧係数、*:設定値である。
Iqc,モータ定数を用いて表すと、
Ke,およびId*を「ゼロ」、Iq*を「所定値」に設定して電流指令値の演算を行うと、q軸電流指令演算部9の出力値Iq**は、数(9)で示すことができる。
ΔVrを同定することができる。
113の3つを乗算して得られた第3の信号とを加算する。
図6は、本発明の他の実施例を示す。
11a1の3つを乗じて得られた第2の信号と、推定位相誤差値の正弦(sin)信号
sinΔθcと余弦(cos) 信号cosΔθcと周波数指令値ω1 *とq軸の電流検出値Iqcおよびモータのd軸インダクタンス値とq軸インダクタンス値の差分値である11a2の5つを乗算して得られた第3の信号とを加算する。
図8は、本発明の他の実施例を示す。
sinΔθcと余弦(cos) 信号cosΔθcと周波数指令値ω1 *とq軸電流検出値Iqcおよびモータのd軸インダクタンス値とq軸インダクタンス値の差分値11b2の5つを乗算して得られた第3の信号を加算する。この加算値に、比例ゲイン11b4を乗じた結果が電流制御遅れ時間相当の一次遅れフィルタ11b5に入力され、さらにその出力値から、q軸電流検出値Iqcと抵抗の設定値11b3との乗算値が減算され、抵抗の設定誤差を補償する電圧値ΔVr*となる。
上記の第1〜第3の実施例では、
高価な電流検出器3で検出した3相の交流電流Iu〜Iwを検出する方式であったが、安価な電流検出を行う制御装置においても適用することができる。
図11を用いて本発明をモジュールに適用した例について説明する。本実施例は、第1の実施例の実施形態を示すものである。ここで、位相誤差演算部4,周波数演算部5,位相演算部6,座標変換部7,d軸電流指令演算部8,q軸電流指令演算部9,ベクトル制御演算部10,抵抗同定演算部11,座標変換部12は1チップマイコンを用いて構成している。また、前記1チップマイコンと電力変換器(インバータ2)は、同一基板上で構成される1モジュール内に納められている形態となっている。ここでいうモジュールとは「規格化された構成単位」という意味であり、分離可能なハードウェア/ソフトウェアの部品から構成されているものである。尚、製造上、同一基板上で構成されていることが好ましいが、同一基板に限定はされない。これより、同一筐体に内蔵された複数の回路基板上に構成されても良い。他の実施例においても同様の形態構成をとることができる。
12…座標変換部、13…電流再現部、Id*…第1のd軸電流指令値、Id**…第2のd軸電流指令値、Iq* …第1のq軸電流指令値、Iq** …第2のq軸電流指令値、
ΔVd…d軸電流制御の出力値、ΔVq…q軸電流制御値の出力値、Vd**…d軸の電圧指令値、θc*…回転位相指令値、ω1 *…周波数指令値、Δθ…位相誤差値、Δθc…推定位相誤差値。
Claims (9)
- 永久磁石同期モータを制御するインバータの周波数指令値を積分して求めた回転位相指令値と永久磁石モータの回転位相値との偏差である位相誤差値を求め、前記推定位相誤差値がゼロとなるように前記周波数指令値を演算する永久磁石同期電動機のベクトル制御装置において、
回転座標系のd軸(磁束軸相当)およびq軸(トルク軸相当)の電流値指令値あるいは電流検出値、モータの電流検出値が上位から与えられるd軸およびq軸の電流指令値に追従するように演算された電流制御の出力値,周波数指令値,推定位相誤差値およびモータ定数を用いて、モータの抵抗値を同定するように制御すると共に、
前記モータの抵抗値の同定演算は、q軸の電流制御の出力値である第1の信号と、推定位相誤差値の余弦(cos)信号、周波数指令値およびモータの誘起電圧係数を乗算して得られた第2の信号と、推定位相誤差値の正弦(sin)信号,推定位相誤差値の余弦(cos)信号,周波数指令値,q軸の電流検出値およびモータのd軸インダクタンス値とq軸インダクタンス値の差分値を乗算して得られた第3の信号とを加算することより行うことを特徴とする永久磁石同期モータの制御装置。 - 請求項1に記載の永久磁石同期モータの制御装置において、
同定演算により得られた前記モータの抵抗値を、比例あるいは積分演算し、一次遅れ処理を施した出力値を用いて、q軸の電流指令値あるいはq軸の電流検出値で除算することにより、モータの抵抗値あるいは抵抗の設定誤差値を演算により求め、q軸の電圧指令値あるいは位相誤差値の少なくとも一方の演算における抵抗の設定値を補正することを特徴とする永久磁石同期モータの制御装置。 - 永久磁石同期モータを制御するインバータの周波数指令値を積分して求めた回転位相指令値と永久磁石モータの回転位相値との偏差である位相誤差値を求め、前記推定位相誤差値がゼロとなるように前記周波数指令値を演算する永久磁石同期電動機のベクトル制御装置において、
回転座標系のd軸(磁束軸相当)およびq軸(トルク軸相当)の電流値指令値あるいは電流検出値,モータの電流検出値が上位から与えられるd軸およびq軸の電流指令値に追従するように演算された電流制御の出力値,周波数指令値,推定位相誤差値およびモータ定数を用いて、モータの抵抗値を同定するように制御すると共に、
前記モータの抵抗値の同定演算は、q軸の電流制御の出力値である第1の信号と、定数1から推定位相誤差値の余弦(cos)信号を減算した値、周波数指令値およびモータの誘起電圧係数の3つを乗算して得られた第2の信号と、推定位相誤差値の正弦(sin)信号,推定位相誤差値の余弦(cos)信号,周波数指令値,q軸の電流検出値およびモータのd軸インダクタンス値とq軸インダクタンス値の差分値の5つを乗算して得られた第3の信号とを加算することより行うことを特徴とする永久磁石同期モータの制御装置。 - 請求項3に記載の永久磁石同期モータの制御装置において、
同定演算により得られた前記モータの抵抗値を、比例あるいは積分演算し、一次遅れ処理を施した出力値を用いて、q軸の電流指令値あるいはq軸の電流検出値で除算することにより、モータの抵抗値あるいは抵抗の設定誤差値を演算により求め、q軸の電圧指令値あるいは位相誤差値の少なくとも一方の演算における抵抗の設定値を補正することを特徴とする永久磁石同期モータの制御装置。 - 永久磁石同期モータを制御するインバータの周波数指令値を積分して求めた回転位相指令値と永久磁石モータの回転位相値との偏差である位相誤差値を求め、前記推定位相誤差値がゼロとなるように前記周波数指令値を演算する永久磁石同期電動機のベクトル制御装置において、
回転座標系のd軸(磁束軸相当)およびq軸(トルク軸相当)の電流値指令値あるいは電流検出値,モータの電流検出値が上位から与えられる第1のd軸およびq軸の電流指令値に追従するように制御された第2の電流指令値,周波数指令値,推定位相誤差値およびモータ定数を用いて、モータの抵抗値相当を同定するように制御すると共に、
前記モータの抵抗値の同定演算は、推定位相誤差値を用いて、正弦(sin)信号と余弦(cos)信号を作成し、q軸の電流指令演算の出力である第2のq軸電流指令値と電流検出値との偏差に設定する抵抗値を乗算して得られた第1の信号と、定数1から推定位相誤差値の余弦(cos)信号を減算した値、周波数指令値およびモータの誘起電圧係数を乗算して得られた第2の信号と、推定位相誤差値の正弦(sin)信号,周波数指令値の二乗値およびモータの定数演算値を乗算して得られた第3の信号とを加算することより行うことを特徴とする永久磁石同期モータの制御装置。 - 請求項5に記載の永久磁石同期モータの制御装置において、
同定演算により得られた前記モータの抵抗値を、比例あるいは積分演算し、一次遅れ処理を施した出力値を用いて、q軸の電流指令値あるいはq軸の電流検出値で除算することにより、モータの抵抗値あるいは抵抗の設定誤差値を演算により求め、q軸の電圧指令値あるいは位相誤差値の少なくとも一方の演算における抵抗の設定値を補正することを特徴とする永久磁石同期モータの制御装置。 - 請求項1乃至6に記載の永久磁石同期モータの制御装置において、
前記モータの抵抗値とは、前記モータの抵抗値を含む電圧値あるいは設定する抵抗値とモータの抵抗値との誤差情報を含む電圧値であることを特徴とする永久磁石同期モータの制御装置。 - 請求項1乃至6に記載の永久磁石同期モータの制御装置において、
前記電流検出値は、前記インバータの入力直流母線電流検出値からモータ電流を再現した電流であることを特徴とする永久磁石同期モータの制御装置。 - 永久磁石同期モータを制御するインバータの周波数指令値を積分して求めた回転位相指令値と永久磁石モータの回転位相値との偏差である位相誤差値を求め、前記推定位相誤差値がゼロとなるように前記周波数指令値を演算する制御装置と電力変換器を有するモジュールにおいて、
回転座標系のd軸(磁束軸相当)およびq軸(トルク軸相当)の電流値指令値あるいは電流検出値,モータの電流検出値が上位から与えられる第1のd軸およびq軸の電流指令値に追従するように制御された第2の電流指令値,周波数指令値,推定位相誤差値およびモータ定数を用いて、モータの抵抗値相当を同定するように制御すると共に、
前記モータの抵抗値の同定演算は、推定位相誤差値を用いて、正弦(sin)信号と余弦(cos)信号を作成し、q軸の電流指令演算の出力である第2のq軸電流指令値と電流検出値との偏差に設定する抵抗値を乗算して得られた第1の信号と、定数1から推定位相誤差値の余弦(cos)信号を減算した値、周波数指令値およびモータの誘起電圧係数を乗算して得られた第2の信号と、推定位相誤差値の正弦(sin)信号,周波数指令値の二乗値およびモータの定数演算値を乗算して得られた第3の信号とを加算することにより行うことを特徴とするモジュール。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004266164A JP4517793B2 (ja) | 2004-09-14 | 2004-09-14 | 永久磁石同期モータの制御装置及びモジュール |
| US11/205,907 US7388341B2 (en) | 2004-09-14 | 2005-08-17 | Control system for permanent magnet synchronous motor and module |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004266164A JP4517793B2 (ja) | 2004-09-14 | 2004-09-14 | 永久磁石同期モータの制御装置及びモジュール |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006087152A JP2006087152A (ja) | 2006-03-30 |
| JP4517793B2 true JP4517793B2 (ja) | 2010-08-04 |
Family
ID=36033202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004266164A Active JP4517793B2 (ja) | 2004-09-14 | 2004-09-14 | 永久磁石同期モータの制御装置及びモジュール |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7388341B2 (ja) |
| JP (1) | JP4517793B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105262395A (zh) * | 2015-10-29 | 2016-01-20 | 华中科技大学 | 基于滑模控制理论的永磁同步电机的控制方法及系统 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4517793B2 (ja) * | 2004-09-14 | 2010-08-04 | 株式会社日立製作所 | 永久磁石同期モータの制御装置及びモジュール |
| US7492616B2 (en) * | 2005-03-25 | 2009-02-17 | Lineage Power Corporation | Modulation controller, method of controlling and three phase converter system employing the same |
| JP2008086129A (ja) * | 2006-09-28 | 2008-04-10 | Hitachi Ltd | 交流電動機の制御装置および定数測定装置 |
| JP5176420B2 (ja) | 2007-08-02 | 2013-04-03 | 株式会社ジェイテクト | ブラシレスモータのセンサレス制御装置 |
| JP5130031B2 (ja) * | 2007-12-10 | 2013-01-30 | 株式会社日立製作所 | 永久磁石モータの位置センサレス制御装置 |
| US7646202B2 (en) * | 2007-12-17 | 2010-01-12 | Delta Electronics, Inc. | Static measuring method of electrical references of three-phase permanent magnet synchronous motor |
| TWI341641B (en) * | 2007-12-24 | 2011-05-01 | Delta Electronics Inc | Apparatus and method for sensorless control of induction motor |
| JP2010057228A (ja) * | 2008-08-27 | 2010-03-11 | Hitachi Ltd | モータ制御装置 |
| JP5417051B2 (ja) | 2009-06-11 | 2014-02-12 | 日立アプライアンス株式会社 | インバータの制御装置、及び、それを用いた空調機,洗濯機 |
| JP5546804B2 (ja) * | 2009-06-18 | 2014-07-09 | ビアメカニクス株式会社 | 電動機駆動制御装置。 |
| TWI415379B (zh) * | 2009-09-02 | 2013-11-11 | Univ Nat Taiwan Science Tech | 交流電動機之具有故障後的運轉控制裝置及其控制方法 |
| JP5537399B2 (ja) * | 2010-12-16 | 2014-07-02 | 株式会社日立製作所 | 制御装置 |
| JP5652610B2 (ja) * | 2011-02-15 | 2015-01-14 | サンデン株式会社 | モータ制御装置 |
| JP5838032B2 (ja) | 2011-02-15 | 2015-12-24 | サンデンホールディングス株式会社 | モータ制御装置 |
| CN102957372A (zh) * | 2011-08-23 | 2013-03-06 | 上海工程技术大学 | 一种永磁同步电机双闭环控制系统 |
| CN102545742B (zh) * | 2012-02-27 | 2014-03-12 | 固高科技(深圳)有限公司 | 永磁同步电动机无位置传感器控制装置和控制方法 |
| CN102857161B (zh) * | 2012-09-24 | 2015-04-29 | 海信(山东)空调有限公司 | 空调设备及其永磁同步电机控制方法和装置 |
| CN103684170A (zh) * | 2013-11-26 | 2014-03-26 | 福州大学 | 一种永磁同步直线电机弦截法内模位置控制方法 |
| CN104601071B (zh) * | 2015-01-30 | 2017-06-06 | 福州大学 | 基于扰动观测器的永磁同步电机电流环滑模控制系统 |
| CN106549619B (zh) * | 2016-10-26 | 2018-11-09 | 东南大学 | 一种基于速度精确辨识的永磁同步电机控制系统 |
| DE102017128602A1 (de) * | 2017-10-18 | 2019-04-18 | Liebherr-Components Biberach Gmbh | Verfahren zum Bestimmen der Fehlspannung eines Stromrichters sowie Drehfeldmaschine mit Fehlspannungskompensation |
| CN108365788B (zh) * | 2018-04-17 | 2021-08-24 | 哈尔滨理工大学 | 一种基于无源性控制的矩阵变换器-永磁同步电机调速系统和方法 |
| US11404984B2 (en) * | 2018-06-20 | 2022-08-02 | Steering Solutions Ip Holding Corporation | Parameter learning for permanent magnet synchronous motor drives |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001045800A (ja) * | 1999-07-28 | 2001-02-16 | Toyo Electric Mfg Co Ltd | 同期電動機の制御方法 |
| JP2001145399A (ja) * | 1999-11-15 | 2001-05-25 | Toyo Electric Mfg Co Ltd | 永久磁石型同期電動機の制御装置 |
| WO2003081765A1 (fr) * | 2002-03-22 | 2003-10-02 | Matsushita Electric Industrial Co., Ltd. | Dispositif de commande d'un moteur a reluctance synchrone |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3262146B2 (ja) * | 1993-09-28 | 2002-03-04 | 富士電機株式会社 | 交流電動機の可変速駆動装置 |
| WO2000074228A1 (fr) * | 1999-05-28 | 2000-12-07 | Kabushiki Kaisha Yaskawa Denki | Procede de commande de regime pour moteur synchrone et procede d'identification de constante |
| JP3411878B2 (ja) * | 2000-03-06 | 2003-06-03 | 株式会社日立製作所 | 同期モータの回転子位置推定方法、位置センサレス制御方法及び制御装置 |
| JP4300730B2 (ja) | 2001-11-22 | 2009-07-22 | 三菱電機株式会社 | 永久磁石電動機装置、冷凍サイクル装置、永久磁石電動機の駆動方法 |
| CN100417004C (zh) * | 2003-07-23 | 2008-09-03 | 松下电器产业株式会社 | 电动机控制设备及使用其的洗衣机和干燥机 |
| JP4517793B2 (ja) * | 2004-09-14 | 2010-08-04 | 株式会社日立製作所 | 永久磁石同期モータの制御装置及びモジュール |
| JP4589093B2 (ja) * | 2004-12-10 | 2010-12-01 | 日立オートモティブシステムズ株式会社 | 同期モータ駆動装置及び方法 |
| US7652441B2 (en) * | 2005-07-01 | 2010-01-26 | International Rectifier Corporation | Method and system for starting a sensorless motor |
-
2004
- 2004-09-14 JP JP2004266164A patent/JP4517793B2/ja active Active
-
2005
- 2005-08-17 US US11/205,907 patent/US7388341B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001045800A (ja) * | 1999-07-28 | 2001-02-16 | Toyo Electric Mfg Co Ltd | 同期電動機の制御方法 |
| JP2001145399A (ja) * | 1999-11-15 | 2001-05-25 | Toyo Electric Mfg Co Ltd | 永久磁石型同期電動機の制御装置 |
| WO2003081765A1 (fr) * | 2002-03-22 | 2003-10-02 | Matsushita Electric Industrial Co., Ltd. | Dispositif de commande d'un moteur a reluctance synchrone |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105262395A (zh) * | 2015-10-29 | 2016-01-20 | 华中科技大学 | 基于滑模控制理论的永磁同步电机的控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006087152A (ja) | 2006-03-30 |
| US20060055362A1 (en) | 2006-03-16 |
| US7388341B2 (en) | 2008-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4517793B2 (ja) | 永久磁石同期モータの制御装置及びモジュール | |
| JP4881635B2 (ja) | 永久磁石モータのベクトル制御装置 | |
| JP4730073B2 (ja) | 永久磁石同期モータのベクトル制御装置,インバータモジュール、及び永久磁石同期電動機モータ定数表示システム | |
| JP4882645B2 (ja) | 永久磁石モータのインダクタンス同定制御装置及びインバータモジュール | |
| US9294019B2 (en) | Method and apparatus for controlling power converter with inverter output filter | |
| JP4655871B2 (ja) | 永久磁石同期電動機の弱め界磁ベクトル制御装置及びモジュール | |
| JP4677852B2 (ja) | 永久磁石同期モータのベクトル制御装置 | |
| KR100795283B1 (ko) | 유도 전동기의 벡터 제어 장치 | |
| US20140197774A1 (en) | Method and apparatus for controlling power converter with inverter output filter | |
| JP4263582B2 (ja) | ブラシレスモータ制御装置 | |
| JP7151872B2 (ja) | 永久磁石同期機の制御装置 | |
| JP2006094601A5 (ja) | ||
| JP5397664B2 (ja) | モータ制御装置 | |
| JP5150366B2 (ja) | ベクトル制御装置 | |
| JP2006230200A (ja) | 交流電動機の制御装置 | |
| JP6241331B2 (ja) | 電動機の制御装置 | |
| JP5996485B2 (ja) | モータの駆動制御装置 | |
| JP4459778B2 (ja) | Dcブラシレスモータのロータ角度検出方法及びdcブラシレスモータの制御装置 | |
| JP5546754B2 (ja) | 電気車制御装置 | |
| JP2012039716A (ja) | モータ制御装置及びモータ制御方法 | |
| JP2009136035A (ja) | モータ制御装置 | |
| JP5459564B2 (ja) | モータ制御装置 | |
| JP6464559B2 (ja) | 電動機の制御装置 | |
| JP2023158899A (ja) | 電動機の制御方法、及び電動機の制御装置 | |
| JP5482625B2 (ja) | 回転機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060425 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090611 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100427 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100510 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130528 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4517793 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130528 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |