JP4720698B2 - マッサージ機 - Google Patents
マッサージ機 Download PDFInfo
- Publication number
- JP4720698B2 JP4720698B2 JP2006253766A JP2006253766A JP4720698B2 JP 4720698 B2 JP4720698 B2 JP 4720698B2 JP 2006253766 A JP2006253766 A JP 2006253766A JP 2006253766 A JP2006253766 A JP 2006253766A JP 4720698 B2 JP4720698 B2 JP 4720698B2
- Authority
- JP
- Japan
- Prior art keywords
- swing
- massage machine
- swing arm
- force
- damper
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims description 36
- 238000013459 approach Methods 0.000 claims description 5
- 230000033001 locomotion Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 8
- 230000002159 abnormal effect Effects 0.000 description 7
- 230000009471 action Effects 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 238000010009 beating Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004898 kneading Methods 0.000 description 1
- 239000010985 leather Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000036316 preload Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000033764 rhythmic process Effects 0.000 description 1
Images










Description
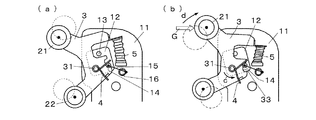
連結板12は、連結板12に固定して立設したピンからなる駆動軸14を備え、ベース部材11は偏心軸を有する回転軸からなるクランク軸16を備えている。駆動軸14とクランク軸16とは、連結部材15によって連結されて往復動作機構を構成している。往復動作機構は、ベース部材11に設けたクランク軸16の連続する一方向の回転aを、駆動軸14の往復動に変換する。従って、クランク軸16が回転すると、駆動軸14が往復動し、連結板12は、たたき軸13の回りで振り子運動をする。この往復動作機構と揺動軸31などにより、揺動アームを揺動(たたき動作)させる駆動機構が構成されている。
また、揺動アーム3とベース部材11とは、ダンパ5によって接続されている。ダンパ5は、蛇腹によって伸縮するエアバッグにより構成されている。ダンパ5の伸縮方向の一端は、取付部材51を介してベース部材11に固定され、他端は、取付部材52を介して揺動アーム3に固定されている。ダンパ5は、伸張時にはエアバッグ内に空気が流入し、、縮退時にはエアバッグから空気が流出する。空気の流入出に対する抵抗によって、ダンパ機能が生じる。
上述のマッサージ機1の構成のもとで、かつ、施療子2に外力が作用しない条件のもとで、クランク軸16が回転すると、図1(a)、図2(a)、図3(a)に示すように、クランク軸16の回転位置に応じて、連結板12と揺動アーム3とが互いに一体となった状態で、たたき軸13の回りに振り子動作、すなわち、たたき動作をする(駆動機構による所定の揺動)。連結板12と揺動アーム3とが、互いに一体となった状態を保つのは、上述のコイルバネ4の付勢力の作用による。
次に、上述の構成のもとで、かつ、施療子2に外力が作用する条件のもとで、揺動アームの動作を説明する。図1(a)に示す状態のもとで、施療子21に外力Gが作用すると、図1(b)に示すように、連結板12は動かずに、揺動アーム3が矢印dで示す方向に揺動し、外力Gとコイルバネ4の付勢力とがつり合った位置か、または、駆動軸14が切欠部33における他方の揺動端に来た位置において、揺動アーム3の揺動が停止する(外力による揺動)。
外力Gが消失すると、揺動アーム3は、付勢力によって、揺動軸31のまわりに矢印cの方向に回転して、駆動機構による揺動状態を外れた揺動状態から復帰する。すなわち、駆動軸14が、切欠部33内で、揺動端の位置に戻る。
揺動アーム3が駆動機構による揺動状態を外れた揺動状態から、コイルバネ4による付勢力によって、駆動機構による揺動状態に復帰するに際して、揺動アーム3の回転速度は、ダンパ5による抵抗によって適度の速度に減速される。すなわち、ダンパ5は、異音を発生したり衝撃を与えたりすることなく、施療子2が円滑で快適な揺動動作を実現できるように、復帰動作を緩慢化する。図2(b)、図3(b)に示している、外力Gによる揺動アーム3の揺動軸31回りの揺動、および、付勢力による復帰の動作とダンパによる復帰動作の緩慢化も、上述の図1(b)の揺動動作と同様である。
2,21,22 施療子
3 揺動アーム
4 コイルバネ(付勢手段)
5 ダンパ
31 揺動軸
M 被施療者
Claims (5)
- 被施療者の身体をマッサージするための一対の施療子を両端部に有する揺動可能に軸支された揺動アームと、前記揺動アームを揺動軸回りに揺動駆動する駆動機構と、を備えたマッサージ機において、
前記揺動アームに揺動軸回りの一方向に付勢力を与える付勢手段と、
前記揺動アームが前記駆動機構による所定の揺動状態から外力付加に起因して外れた場合に前記付勢手段による付勢力により前記所定の揺動状態に復帰するときの動作を緩慢にする抵抗力を付与するダンパと、を備えたことを特徴とするマッサージ機。 - 前記付勢手段は、前記揺動アームに、前記施療子の一方が被施療者の身体に近付く方向となるように付勢力を与えることを特徴とする請求項1に記載のマッサージ機。
- 前記付勢手段は、前記揺動アームが揺動中心に位置するように付勢力を与えることを特徴とする請求項1に記載のマッサージ機。
- 前記ダンパがエアバッグにより構成されていることを特徴とする請求項1乃至請求項3のいずれか一項に記載のマッサージ機。
- 前記ダンパは、その抵抗力を調節可能に構成されていることを特徴とする請求項1乃至請求項4のいずれか一項に記載のマッサージ機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006253766A JP4720698B2 (ja) | 2006-09-20 | 2006-09-20 | マッサージ機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006253766A JP4720698B2 (ja) | 2006-09-20 | 2006-09-20 | マッサージ機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008073135A JP2008073135A (ja) | 2008-04-03 |
| JP4720698B2 true JP4720698B2 (ja) | 2011-07-13 |
Family
ID=39345830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006253766A Expired - Fee Related JP4720698B2 (ja) | 2006-09-20 | 2006-09-20 | マッサージ機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4720698B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6052760B2 (ja) * | 2012-02-09 | 2016-12-27 | ファミリーイナダ株式会社 | マッサージ機の強弱調整機構 |
| JP6289074B2 (ja) * | 2013-12-18 | 2018-03-07 | ファミリーイナダ株式会社 | マッサージユニット |
| JP6371549B2 (ja) * | 2014-03-26 | 2018-08-08 | ファミリーイナダ株式会社 | マッサージ機 |
| JP6936477B2 (ja) * | 2017-09-27 | 2021-09-15 | 大東電機工業株式会社 | マッサージ機 |
| JP7001269B2 (ja) * | 2018-08-17 | 2022-02-03 | 大東電機工業株式会社 | マッサージ装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4063150B2 (ja) * | 2003-06-04 | 2008-03-19 | 松下電工株式会社 | マッサージ機 |
| JP2006034636A (ja) * | 2004-07-27 | 2006-02-09 | Matsushita Electric Works Ltd | マッサージ機 |
| JP2006043220A (ja) * | 2004-08-05 | 2006-02-16 | Daito Denki Kogyo Kk | マッサージ装置 |
-
2006
- 2006-09-20 JP JP2006253766A patent/JP4720698B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008073135A (ja) | 2008-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5719630B2 (ja) | マッサージ機 | |
| JP4720698B2 (ja) | マッサージ機 | |
| JP7094534B2 (ja) | 施療ユニットおよびマッサージ機 | |
| JP5844922B2 (ja) | マッサージ力感応駆動機構を有するマッサージ装置 | |
| JP6720446B2 (ja) | マッサージ機構、及びこのマッサージ機構を備えた椅子型マッサージ機 | |
| JP2007532158A (ja) | マッサージアーム | |
| JP2007020927A (ja) | マッサージユニット及びマッサージ機 | |
| JP2004357938A (ja) | マッサージ機 | |
| JP6165031B2 (ja) | マッサージ機 | |
| JP5593298B2 (ja) | マッサージ機 | |
| JP2002301128A (ja) | マッサージ機 | |
| JP4692110B2 (ja) | マッサージ機 | |
| JP2010082329A (ja) | 小型マッサージ装置 | |
| JP4710759B2 (ja) | マッサージ機 | |
| KR100474187B1 (ko) | 의자식 마사지기 | |
| JPH0759825A (ja) | マッサージ機 | |
| JP7001269B2 (ja) | マッサージ装置 | |
| JP7395190B2 (ja) | 着座型運動装置 | |
| JP2005230399A (ja) | マッサージ機 | |
| JP7049671B2 (ja) | マッサージ機 | |
| JP7339659B2 (ja) | 肩頸部位の緩癒装置 | |
| JP2001314463A (ja) | 携帯用挟持マッサージ機 | |
| WO2016104021A1 (ja) | マッサージ装置 | |
| JP7323930B2 (ja) | 往復移動機構 | |
| JP2643998B2 (ja) | マッサージ機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081210 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110303 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110321 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140415 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4720698 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |