JP4687518B2 - 画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 - Google Patents
画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 Download PDFInfo
- Publication number
- JP4687518B2 JP4687518B2 JP2006068212A JP2006068212A JP4687518B2 JP 4687518 B2 JP4687518 B2 JP 4687518B2 JP 2006068212 A JP2006068212 A JP 2006068212A JP 2006068212 A JP2006068212 A JP 2006068212A JP 4687518 B2 JP4687518 B2 JP 4687518B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- edge
- pixel
- model
- extracted
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/22—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition
- G06V10/23—Image preprocessing by selection of a specific region containing or referencing a pattern; Locating or processing of specific regions to guide the detection or recognition based on positionally close patterns or neighbourhood relationships
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Description
モデル画像に対応する画像領域を抽出するための代表的な方法として、各構成画素の濃度データを用いた正規化相関演算を行う方法が知られている。また、処理対象画像、モデル画像のそれぞれについて、画像中のエッジ画素(エッジを構成する一画素を意味する。)における濃度の変化の方向(濃度勾配方向)を求め、その変化の方向の分布パターンを比較する方法(特許文献1参照)も提案されている。
また、この方法は、処理対象画像に対し、モデル画像を1画素ずつ走査しながら相関演算を実行するものであるため、対象物の位置をピクセル単位でしか求めることができない。サブピクセル単位での位置を求めるために、各走査位置で得られる類似度の変化を放物線に近似すると仮定し、その放物線の頂点を算出する方法も提案されているが、この種の類似度の変化が放物線に近似するとは必ずしも言えないため、信頼度の高い計測を行えないという問題がある。
なお、検索方向に複数のエッジ画素があり、これらのエッジ画素の濃度勾配方向が共通する場合(すなわち各濃度勾配方向間の角度差が所定値以内である場合)には、これら複数のエッジ画素につき1つのエッジ位置を求めてもよい。この場合、ステップCでは、前記複数のエッジ画素のそれぞれに同じエッジ位置および濃度勾配方向を対応づけてもよい。
第1ステップでは、前記モデル画像と同サイズの検索領域を処理対象画像にピクセル単位で走査して、走査位置毎に前記検索領域の画像とモデル画像との類似度を算出し、その算出結果を用いて前記モデル画像への対応領域を抽出する。
類似度の算出は、たとえば濃淡画像データを対象とする正規化相関演算や、前記した特許文献1の方法を用いて行われる。すなわち、この第1ステップは、従来のピクセル単位でのマッチング処理に相当するものであって、たとえば、抽出された対応領域内の任意の代表点の位置のピクセル単位の座標を、対象物の位置として求めることができる。
また、エッジ位置のずれ量の算出処理では、たとえばエッジ位置を抽出したエッジ画素毎に、それぞれそのエッジ位置とモデル画像側のエッジ位置との座標の差を算出し、その差の平均値を求める。
これにより第1ステップで求めた対象物の大まかな位置をサブピクセル単位で修正することが可能になり、対象物の位置を精度良く求めることができる。
「各エッジ画素における濃度勾配方向の分布パターン」は、たとえば、各エッジ画素における濃度勾配方向を示す角度データをそれぞれ当該エッジ画素の座標に対応づけた疑似画像として構成される。また、処理対象画像についても、同様の疑似画像を作成し、その画像に前記モデル画像側の疑似画像を走査しつつ、各走査位置におけるパターンの類似度を算出し、類似度が最大になるときに前記モデル画像側の疑似画像に重なる画像領域を抽出してもよい。
なお、各撮像手段に対応する画像毎に前記モデル画像を用意しても良いが、各画像に共通のモデル画像を1つ用意してもよい。または、特定の撮像手段に対応する画像に対してのみモデル画像を用意し、その画像に対するステップaで抽出した対応領域の画像を、その他の撮像手段に対するモデル画像としてもよい。
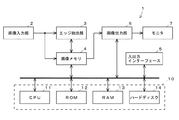
さらにこの画像処理装置には、画像格納用のメモリ(以下、「画像メモリ」という。)を設けるのが望ましい。
画像入力手段およびメモリを除く各手段は、たとえばそれぞれその手段の処理を実行するためのソフトウェアが組み込まれたコンピュータにより構成される。ただし、いずれの手段も、コンピュータに限らず、トランジスタなどを含む論理回路として構成してもよい。特に、エッジ抽出手段を論理回路にして、画像入力手段から入力された画像をダイレクト入力して処理するようにすれば、その他の手段による処理を迅速に進めることができ、処理時間の短縮化をはかることができる。
この画像処理装置1は、所定形状の対象物を撮像して得られた濃淡画像を処理対象として、その画像上の対象物の位置を計測する処理を行うもので、画像入力部2、エッジ抽出部3、画像メモリ4、入出力インターフェース5、画像出力部6、モニタ7、制御部10などを含んでいる。
なお、以下では、特許文献1の記載に倣って、濃度勾配の大きさを「エッジ強度」、濃度勾配方向を示す角度データを「エッジコード」と呼び、これらによる疑似画像を「エッジ強度画像」「エッジコード画像」と呼ぶ。
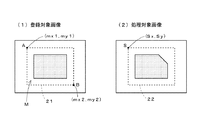
図2は、前記モデル画像の登録に使用される濃淡画像(以下、「登録対象画像」という。)、および計測対象の濃淡画像(以下、「処理対象画像」という。)の例を示す。
エッジ抽出部3は、画像入力部2から入力された画像に所定大きさのマスクを走査しつつ、各走査位置において、前記マスク内の画像にソーベルオペレータなどのエッジ抽出用フィルタを作用させて、画素毎に、x軸(水平方向に沿う軸)およびy軸(垂直方向に沿う軸)の濃度勾配Ex(x,y),Ey(x、y)を抽出する。さらに、エッジ抽出部3は、これらの濃度勾配Ex(x,y),Ey(x,y)を用いて、前記したエッジ強度およびエッジコードを算出する。
一方、前記登録対象画像から生成されたエッジ強度画像およびエッジコード画像からは、それぞれ前記モデル画像に対応する領域内のデータが抽出され、前記登録エリアに格納される。以下、登録されたエッジ強度画像を、エッジ強度モデル画像として、各画素をMEi(x,y)と表し、登録されたエッジコード画像を、エッジコードモデル画像として、各画素をMEc(x,y)と表すことにする。
なお、図3の画像では、濃度勾配方向がx軸またはy軸に沿っているため、濃淡エッジ位置の座標(xL,yL)のうちの一方は、着目中のエッジ画素と同じになる。もし斜め方向に濃度勾配が現れている場合には、その方向に沿うエッジ強度の変化を用いて、x,yの各方向とも濃淡エッジ位置を求める必要がある。
なお、前記したように、数画素分のエッジ画素の組につき1つの濃淡エッジ位置を求めた場合には、その組を構成するすべての画素に前記濃淡エッジ位置を対応づけることができる。
処理対象画像から対象物の仮の位置Sを抽出する処理では、エッジ強度画像Ei(x,y)、エッジコード画像Ec(x,y)、エッジ強度モデル画像MEi(x,y)およびエッジコードモデル画像MEc(x,y)を使用して、モデル画像に最も類似する領域を対応領域22として抽出する。具体的には、処理対象画像にモデル画像と同サイズの検索領域をピクセル単位で走査しながら、走査位置毎に、検索領域とモデル画像との間でのエッジコードの分布パターンの類似度を求め、類似度が最も大きい位置での検索領域を対応領域22とし、その左上頂点を仮の位置Sとする。
なお、この抽出処理は、特許文献1に記載されているのと同様の方法により行われるものであるため、ここでは詳細な説明を省略する。
前記ML(x,y)=1、すなわちモデル画像側の対応画素に濃淡エッジ位置(MXL(x,y),MYL(x,y))が対応づけられている場合には、ST105が「YES」となってST106に進み、着目画素がエッジ画素であるか否かを判別する。具体的には、処理対象画像から生成されたエッジ強度画像の画素Ei(Sx+x,Sy+y)が前記したしきい値Ei0以上であれば、着目画素はエッジ画素であると判断する。
ST110では、ST108で求めた濃淡エッジ位置(xL,yL)、モデル画像側の対応画素の濃淡エッジ位置(MXL(x,y),MYL(x,y))、および前記点Sの座標(Sx,Sy)を用いて、x,yの各軸方向毎に、モデル側の濃淡エッジ位置に対する処理対象画像側の濃淡エッジ位置のずれ量dx,dyを求める。同時にST110では、画素毎のずれ量dx,dyを加算する処理も実行する。
この実施例も、基本的な処理の内容は図4と同様であるが、エッジコードの示す方向によってずれ量の算出方法を変更した点に特徴がある。この方法を実行するために、この実施例では、濃淡エッジ位置の抽出数を、x,yの方向毎に個別に計数するようにしている。図中、xnはx方向における抽出数であり、ynはy方向における抽出数である。
その他のパラメータは、前記図4と同様である。
ST205〜207では、前記図4のST105〜107と同様に、モデル画像側の対応画素に濃淡エッジ位置が設定されているか否か、着目画素がエッジ画素であるか否か、着目画素のエッジコードがモデル画素の対応画素におけるエッジコードに一致するか否かを判別する。ST205〜207の判別結果がすべて「YES」となれば、ST208に進み、着目画素について濃淡エッジ位置(xL,yL)を抽出する。
この実施例では、検査に先立ち、複数の特徴点を有するキャリブレーション用ワークをカメラC0,C1により撮像し、前記画像処理部622や計測処理部623の機能を用いて、生成された正面視画像および斜め画像上の特徴点を抽出し、これらの特徴点の座標と前記キャリブレーションワーク上の各特徴点の既知の位置関係に基づき、各パラメータの値を算出するようにしている。
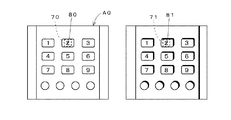
この実施例のワークには複数の被検査部位(操作部のキー)が含まれており、これら被検査部位毎に個別のモデル画像が登録されている。またモデル画像毎に、最初の実施例と同様のエッジ強度モデル画像MEi(x,y)、エッジコードモデル画像MEc(x,y)、濃淡エッジ位置MXL(x,y)、MYL(x,y)、ならびにフラグデータML(x,y)が登録される。なお、この実施例のモデル画像は、良品モデルの正面視画像から切り出される。
前記判定部624は、前記計測処理部623が算出した3次元座標のうち、高さを表すZ座標を所定の判定基準値と比較することにより、被検査部位であるキーの高さの適否を判定する。この判定結果は出力部628および表示制御部625に出力される。
この変換処理は公知であるので簡単に言うと、まず前記パラメータ記憶部627に登録されたパラメータを用いて、変換後画像の各画素毎に、斜め画像A1上で当該画素に対応する矩形領域の頂点を求める。さらに、前記矩形領域の各頂点を含む4つの画素の濃度を、それぞれその画素と前記矩形領域との重なり部分が矩形領域全体に占める割合により重み付けし、重み付けされた4画素の濃度を加算して得られる値を、前記矩形領域に対応する画素の濃度に設定する。
変換後画像は正面視画像A0と同一平面上にあることから、エピポーララインはx軸またはy軸に平行になる。したがって、たとえばエピポーララインがx軸に平行であれば、y座標の範囲が前記対応領域70に対応する帯状の検索領域を設定してサーチを行えばよい。
さらにST309では、座標(Ox1´,Oy1´)を斜め画像上の座標(Ox1,Oy1)に変換し、変換後の座標が示す点を斜め画像A1の計測対象点81として設定する。この変換処理も、前記斜め画像A1の変換処理で使用したパラメータを用いた演算により行われるので、変換後の座標(Ox1,Oy1)としてもサブピクセル単位の座標を得ることができる。
このように、斜め画像A1を正面視画像に変換することで、モデル画像の代表点に対応する点を簡単に求めた後に、その座標を元の斜め画像A1に反映させることにより、斜め画像A1についても、サブピクセル単位の計測対象点81を求めることができる。
2 画像入力部
3 エッジ抽出部
4 画像メモリ
10 制御部
11 CPU
14 ハードディスク
22,70,71 モデル画像への対応領域
80,82 計測対象点
620 演算処理部
622 画像処理部
623 計測処理部
C0,C1 カメラ
M モデル画像
S 仮の位置
Claims (5)
- 所定大きさの濃淡画像を処理対象として、この処理対象画像からあらかじめ特定されたモデルに対応する対象物の位置を抽出する方法において、
前記モデルを撮像して得られたモデル画像に対し、その画像中のエッジからエッジ画素を抽出するステップAと、抽出された各エッジ画素につき、それぞれそのエッジ画素を基準に濃度勾配方向を検索して、サブピクセル単位でのエッジ位置を抽出するステップBと、前記ステップBでエッジ位置が抽出されたエッジ画素について、その抽出位置および抽出に用いた濃度勾配方向を当該エッジ画素に対応づけて登録するステップCとを、あらかじめ実行した後に、前記処理対象画像に対して第1、第2、第3の各ステップを実行し、
前記第1ステップでは、前記モデル画像と同サイズの検索領域を処理対象画像にピクセル単位で走査して、走査位置毎に前記検索領域の画像とモデル画像との類似度を算出し、その算出結果を用いて前記モデル画像への対応領域を抽出し、
前記第2ステップでは、前記第1ステップで抽出された対応領域において、前記サブピクセル単位でのエッジ位置および濃度勾配方向が登録されているモデル画像中のエッジ画素に対応する位置にある画素のうち、エッジ画素であって、その濃度勾配方向が前記モデル画像中の対応する位置にあるエッジ画素の濃度勾配方向に一致するとみなされる画素を抽出し、抽出された各エッジ画素に対し、それぞれ前記ステップBと、そのステップBにより得たサブピクセル単位でのエッジ位置と前記モデル画像中の対応する位置にあるエッジ画素に登録されているエッジ位置とのずれ量を算出する処理とを実行し、
前記第3ステップでは、前記第2ステップで算出されたずれ量により前記対応領域の位置を修正し、修正後の対応領域の位置を前記対象物の位置として特定することを特徴とする画像処理方法。 - 前記第1ステップでは、前記検索領域の各走査位置において、前記モデル画像の各エッジ画素における濃度勾配方向の分布パターンと前記検索領域内の各エッジ画素における濃度勾配方向の分布パターンとの類似度を算出する請求項1に記載された画像処理方法。
- 前記第1ステップでは、前記検索領域が合わせられた処理対象画像上の領域のうち、前記類似度が最も高くなった領域を対応領域として抽出する請求項1に記載された画像処理方法。
- 視野が互いに重なるように配置された複数台の撮像手段により生成される複数の画像からそれぞれ計測対象点を抽出し、各画像上の計測対象点の座標を用いてこれら計測対象点に対応する3次元座標を算出する方法において、
前記エッジを表す特徴点の抽出処理では、前記複数の画像のそれぞれについて、あらかじめ用意されたモデル画像を用いてステップa,b,cを実行し、
前記モデル画像には、サブピクセル単位でのエッジ位置と濃度勾配方向とが対応づけられた複数のエッジ画素と少なくとも1つの代表点とが含まれており、
前記ステップaでは、前記モデル画像と同サイズの検索領域をピクセル単位で走査して、走査位置毎に前記検索領域の画像とモデル画像との類似度を算出し、その算出結果を用いて前記モデル画像への対応領域を抽出し、
前記ステップbでは、ステップaで抽出された対応領域において、前記モデル画像中のサブピクセル単位のエッジ位置および濃度勾配方向が対応づけられたエッジ画素に対応する位置にある画素のうち、エッジ画素であって、その濃度勾配方向が前記モデル画像側の対応する位置にあるエッジ画素の濃度勾配方向に一致するとみなされる画素を抽出し、抽出された各エッジ画素に対し、そのエッジ画素を基準に濃度勾配方向を検索してサブピクセル単位でのエッジ位置を抽出する処理と、当該エッジ位置と前記モデル画像中の対応する位置にあるエッジ画素に対応づけられたサブピクセル単位のエッジ位置とのずれ量を算出する処理とを実行し、
前記ステップcでは、前記ステップaで抽出された対応領域につきモデル画像との間の画素の対応関係に基づき前記代表点に対応する点を計測対象点として抽出し、抽出した計測対象点の座標を前記ステップbで算出されたずれ量により修正することを特徴とする3次元計測方法。 - 濃淡画像を入力するための画像入力手段と、
前記画像入力手段から入力した濃淡画像について、その画像中のエッジからエッジ画素を抽出するとともに、そのエッジ画素における濃度勾配方向を抽出するエッジ抽出手段と、
前記エッジ抽出手段の抽出結果に基づき、前記濃淡画像上のエッジ画素について、その画素を基準に濃度勾配方向を検索して、サブピクセル単位でのエッジ位置を抽出するエッジ位置抽出手段と、
対象物のモデルを含むモデル画像およびそのモデル画像から抽出されたデータを保存するためのメモリと、
前記画像入力手段から前記モデル画像を含む画像が入力されたとき、この入力画像に対する前記エッジ抽出手段およびエッジ位置抽出手段の処理結果をエッジ抽出手段により抽出された各エッジ画素に対応づけたデータを作成して、前記メモリに登録する登録手段と、
前記画像入力手段から前記モデルに対応する対象物を含む処理対象画像が入力されたとき、この処理対象画像に前記モデル画像と同サイズの検索領域をピクセル単位で走査して、走査位置毎に前記検索領域内の画像とモデル画像との類似度を算出し、その算出結果に基づき前記モデル画像への対応領域を抽出する対応領域抽出手段と、
前記対応領域抽出手段により抽出された対応領域において、前記エッジ抽出手段の処理結果に基づき、前記メモリにエッジ位置が登録されているモデル画像中のエッジ画素に対応するエッジ画素を抽出する対応エッジ画素抽出手段と、
前記対応エッジ画素抽出手段により抽出されたエッジ画素およびその近傍の画像を前記エッジ位置抽出手段に処理させて、この処理により抽出されたサブピクセル単位のエッジ位置と前記メモリに登録されたエッジ位置とのずれ量を算出するずれ量算出手段と、
前記ずれ量算出手段により算出されたずれ量により前記対応領域の設定位置を修正し、修正後の対応領域の位置を前記対象物の位置として特定する位置特定手段とを、具備している画像処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006068212A JP4687518B2 (ja) | 2005-03-15 | 2006-03-13 | 画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005072989 | 2005-03-15 | ||
| JP2005072989 | 2005-03-15 | ||
| JP2006068212A JP4687518B2 (ja) | 2005-03-15 | 2006-03-13 | 画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006294003A JP2006294003A (ja) | 2006-10-26 |
| JP4687518B2 true JP4687518B2 (ja) | 2011-05-25 |
Family
ID=36809239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006068212A Active JP4687518B2 (ja) | 2005-03-15 | 2006-03-13 | 画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7742634B2 (ja) |
| EP (1) | EP1708138B1 (ja) |
| JP (1) | JP4687518B2 (ja) |
| KR (1) | KR100817656B1 (ja) |
| CN (1) | CN100582663C (ja) |
Families Citing this family (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100844640B1 (ko) * | 2006-12-12 | 2008-07-07 | 현대자동차주식회사 | 물체 인식 및 거리 계측 방법 |
| US8861834B2 (en) * | 2007-03-09 | 2014-10-14 | Omron Corporation | Computer implemented method for recognizing an object based on a correspondence relationship between object feature points and pre-registered model feature points |
| JP5248806B2 (ja) * | 2007-04-25 | 2013-07-31 | キヤノン株式会社 | 情報処理装置、情報処理方法 |
| JP5013961B2 (ja) * | 2007-05-21 | 2012-08-29 | キヤノン株式会社 | 位置姿勢計測装置及びその制御方法 |
| JP2009205479A (ja) * | 2008-02-28 | 2009-09-10 | Kddi Corp | 撮像装置のキャリブレーション装置、方法及びプログラム |
| JP5206499B2 (ja) * | 2009-03-02 | 2013-06-12 | 富士通株式会社 | 測定方法、測定装置、測定制御プログラム |
| JP5245937B2 (ja) * | 2009-03-12 | 2013-07-24 | オムロン株式会社 | 3次元計測処理のパラメータの導出方法および3次元視覚センサ |
| JP5355292B2 (ja) * | 2009-08-10 | 2013-11-27 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| KR101268520B1 (ko) * | 2009-12-14 | 2013-06-04 | 한국전자통신연구원 | 영상 인식 장치 및 방법 |
| US9879976B2 (en) | 2010-01-20 | 2018-01-30 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine that uses a 2D camera to determine 3D coordinates of smoothly continuous edge features |
| US9607239B2 (en) * | 2010-01-20 | 2017-03-28 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| US9628775B2 (en) | 2010-01-20 | 2017-04-18 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| JP5393531B2 (ja) * | 2010-02-25 | 2014-01-22 | キヤノン株式会社 | 位置姿勢推定装置、位置姿勢推定方法、プログラム、記憶媒体 |
| CN102168945B (zh) * | 2010-02-26 | 2014-07-16 | 鸿富锦精密工业(深圳)有限公司 | 影像测量系统及方法 |
| US8917929B2 (en) * | 2010-03-19 | 2014-12-23 | Lapis Semiconductor Co., Ltd. | Image processing apparatus, method, program, and recording medium |
| CN103080976B (zh) | 2010-08-19 | 2015-08-05 | 日产自动车株式会社 | 三维物体检测装置和三维物体检测方法 |
| RU2558947C2 (ru) * | 2011-04-13 | 2015-08-10 | Ниссан Мотор Ко., Лтд. | Система помощи при вождении и способ определения дождевых капель для нее |
| JPWO2013161384A1 (ja) * | 2012-04-25 | 2015-12-24 | オリンパス株式会社 | 画像処理システム、画像処理方法および画像処理プログラム |
| WO2014002725A1 (ja) * | 2012-06-29 | 2014-01-03 | 富士フイルム株式会社 | 3次元測定方法、装置、及びシステム、並びに画像処理装置 |
| CN102901444B (zh) * | 2012-08-29 | 2015-02-18 | 浙江大学 | 一种基于mp小波滤波的零件尺寸检测方法及其检测系统 |
| JP6015267B2 (ja) * | 2012-09-13 | 2016-10-26 | オムロン株式会社 | 画像処理装置、画像処理プログラム、これを記録したコンピュータ読み取り可能な記録媒体、および、画像処理方法 |
| JP6197340B2 (ja) * | 2013-04-05 | 2017-09-20 | オムロン株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| CN104132650A (zh) * | 2014-06-05 | 2014-11-05 | 贵州大学 | 采用最大轮廓矩形法检测果树树叶稀密程度的方法 |
| US10048749B2 (en) * | 2015-01-09 | 2018-08-14 | Microsoft Technology Licensing, Llc | Gaze detection offset for gaze tracking models |
| US9578207B1 (en) * | 2015-09-30 | 2017-02-21 | Csr Imaging Us, Lp | Systems and methods for selectively screening image data |
| JP2017090945A (ja) * | 2015-11-02 | 2017-05-25 | キヤノン株式会社 | 画像処理装置、画像処理方法、計測装置、及びプログラム |
| JP6348093B2 (ja) * | 2015-11-06 | 2018-06-27 | ファナック株式会社 | 入力データから検出対象物の像を検出する画像処理装置および方法 |
| US9613412B1 (en) | 2015-12-21 | 2017-04-04 | Cambria Company Llc | Stone slab manufacturing methods and systems |
| CN105654473A (zh) * | 2015-12-25 | 2016-06-08 | 傅之成 | 一种亚像素边缘检测方法 |
| CN105716528A (zh) * | 2016-05-09 | 2016-06-29 | 西安捷创测控技术有限公司 | 一种油管螺纹尺寸参数检测方法与设备 |
| CN106204528A (zh) * | 2016-06-27 | 2016-12-07 | 重庆理工大学 | 一种零件几何质量的尺寸检测方法 |
| WO2018072208A1 (en) * | 2016-10-21 | 2018-04-26 | Abb Schweiz Ag | Method, electronic device and system of picking an object from a container |
| JP6833460B2 (ja) * | 2016-11-08 | 2021-02-24 | 株式会社東芝 | 作業支援システム、作業方法、および処理装置 |
| CN106969706A (zh) * | 2017-04-02 | 2017-07-21 | 聊城大学 | 基于双目立体视觉的工件检测与三维测量系统及检测方法 |
| US10467352B2 (en) | 2017-04-03 | 2019-11-05 | Cambria Company Llc | Stone slab production methods and systems |
| EP3644281A4 (en) * | 2017-06-20 | 2021-04-28 | Sony Interactive Entertainment Inc. | CALIBRATION DEVICE, CALIBRATION CHART, CHART PATTERN GENERATING DEVICE, AND CALIBRATION PROCEDURE |
| CN108190418A (zh) * | 2017-12-29 | 2018-06-22 | 苏州德创测控科技有限公司 | 上料平台及工件上料方法 |
| CN113538479B (zh) * | 2020-04-20 | 2023-07-14 | 深圳市汉森软件有限公司 | 图像边缘处理方法、装置、设备及存储介质 |
| CN111751002B (zh) * | 2020-05-15 | 2021-11-23 | 国网浙江省电力有限公司嘉兴供电公司 | 一种基于红外热成像的带电设备故障智能诊断方法 |
| TWI803369B (zh) * | 2022-06-24 | 2023-05-21 | 寶成工業股份有限公司 | 自動模具噴塗系統 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743309A (ja) * | 1993-08-02 | 1995-02-14 | Nec Corp | パターン検査方法 |
| JPH11201908A (ja) * | 1998-01-16 | 1999-07-30 | Nec Corp | 外観検査装置、外観検査方法及び外観検査プログラムを記録した記録媒体 |
| JPH11345315A (ja) * | 1998-06-01 | 1999-12-14 | Nec Corp | 画像位置合わせ方法、画像位置合わせ装置及び記録媒体 |
| JP2001338304A (ja) * | 1999-08-26 | 2001-12-07 | Nano Geometry Kenkyusho:Kk | パターン検査装置、パターン検査方法および記録媒体 |
| JP2002230549A (ja) * | 2001-02-05 | 2002-08-16 | Omron Corp | 画像処理方法およびその装置 |
| JP2006093172A (ja) * | 2004-09-21 | 2006-04-06 | Hitachi Ltd | 半導体デバイスの製造方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040081350A1 (en) * | 1999-08-26 | 2004-04-29 | Tadashi Kitamura | Pattern inspection apparatus and method |
| JP4861574B2 (ja) * | 2001-03-28 | 2012-01-25 | パナソニック株式会社 | 運転支援装置 |
| US7133572B2 (en) * | 2002-10-02 | 2006-11-07 | Siemens Corporate Research, Inc. | Fast two dimensional object localization based on oriented edges |
-
2006
- 2006-03-13 US US11/373,494 patent/US7742634B2/en active Active
- 2006-03-13 KR KR1020060023093A patent/KR100817656B1/ko active IP Right Grant
- 2006-03-13 JP JP2006068212A patent/JP4687518B2/ja active Active
- 2006-03-14 EP EP06005216.4A patent/EP1708138B1/en active Active
- 2006-03-15 CN CN200610057440A patent/CN100582663C/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743309A (ja) * | 1993-08-02 | 1995-02-14 | Nec Corp | パターン検査方法 |
| JPH11201908A (ja) * | 1998-01-16 | 1999-07-30 | Nec Corp | 外観検査装置、外観検査方法及び外観検査プログラムを記録した記録媒体 |
| JPH11345315A (ja) * | 1998-06-01 | 1999-12-14 | Nec Corp | 画像位置合わせ方法、画像位置合わせ装置及び記録媒体 |
| JP2001338304A (ja) * | 1999-08-26 | 2001-12-07 | Nano Geometry Kenkyusho:Kk | パターン検査装置、パターン検査方法および記録媒体 |
| JP2002230549A (ja) * | 2001-02-05 | 2002-08-16 | Omron Corp | 画像処理方法およびその装置 |
| JP2006093172A (ja) * | 2004-09-21 | 2006-04-06 | Hitachi Ltd | 半導体デバイスの製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1708138B1 (en) | 2017-09-13 |
| US20060221417A1 (en) | 2006-10-05 |
| KR20060101268A (ko) | 2006-09-22 |
| CN1834582A (zh) | 2006-09-20 |
| CN100582663C (zh) | 2010-01-20 |
| KR100817656B1 (ko) | 2008-03-31 |
| EP1708138A2 (en) | 2006-10-04 |
| US7742634B2 (en) | 2010-06-22 |
| EP1708138A3 (en) | 2013-08-28 |
| JP2006294003A (ja) | 2006-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4687518B2 (ja) | 画像処理方法およびその方法を用いた3次元計測方法ならびに画像処理装置 | |
| JP5273196B2 (ja) | 画像処理装置 | |
| US10704900B2 (en) | Detection device and detection method | |
| JP4811272B2 (ja) | 3次元計測を行う画像処理装置および画像処理方法 | |
| JP2008152555A (ja) | 画像認識方法及び画像認識装置 | |
| JP3545542B2 (ja) | ウェハの回転方向検出方法 | |
| JP4670994B2 (ja) | カラー画像の処理方法および画像処理装置 | |
| JP4788475B2 (ja) | 画像処理装置および画像処理方法 | |
| JP2000339462A (ja) | 欠陥検査方法および欠陥検査装置 | |
| JP2002140713A (ja) | 画像処理方法およびその装置 | |
| JP2008139262A (ja) | 欠陥検査方法およびその方法を用いた検査装置 | |
| JP4513394B2 (ja) | カラー画像の処理方法および画像処理装置 | |
| JP4470513B2 (ja) | 検査方法および検査装置 | |
| JP4670993B2 (ja) | カラー画像の処理方法および画像処理装置 | |
| JP4670995B2 (ja) | カラー画像の処理方法および画像処理装置 | |
| JP6749528B1 (ja) | 変状管理装置、変状管理方法、および変状管理プログラム | |
| WO2021044629A1 (ja) | 画像処理システムおよび画像処理方法 | |
| JP4406978B2 (ja) | テンプレートマッチング方法 | |
| JP2910706B2 (ja) | Lsi画像の位置合わせ方法 | |
| JPH10208066A (ja) | 被検査物のエッジライン抽出方法及びこの方法を用いた外観検査方法 | |
| JP3447716B2 (ja) | 画像処理装置 | |
| JPH09101113A (ja) | 開先位置,形状の計測方法およびその装置 | |
| JPH10153407A (ja) | 計測処理装置 | |
| JP3447717B2 (ja) | 画像処理装置 | |
| JPH07192134A (ja) | 画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110131 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4687518 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140225 Year of fee payment: 3 |