プリンタ、複写機、ファクシミリ等の機能を有する記録装置、あるいはコンピュータやワードプロセッサ等を含む複合型電子機器やワークステーションなどの出力機器として用いられる記録装置は、記録情報に基づいて用紙やプラスチック薄板等の記録媒体に画像(文字や記号等を含む)を記録していくように構成されている。記録装置は、記録方式により、インクジェット式、ワイヤドット式、サーマル式、レーザービーム式等に分けることができる。
記録媒体の搬送方向(副走査方向)と交叉する方向に主走査しながら記録するシリアルタイプの記録装置においては、記録媒体に沿って移動する記録ヘッド(通常、キャリッジに搭載される)による1ライン分の記録(主走査)と、1ライン分の記録を終了した後の記録媒体のピッチ送り(副走査)とを交互に繰り返しながら、1枚の記録媒体の全体の記録が行われる。一方、1ライン分の記録を一括して行い、記録媒体の副走査のみで記録するラインタイプの記録装置も使用されている。
そのうち、インクジェット式の記録装置(インクジェット記録装置)は、記録手段である記録ヘッドから記録媒体へインクを吐出して記録を行うものであり、記録ヘッドのコンパクト化が容易であり、高精細な画像を高速で記録することができ、普通紙に特別の処理を必要とせずに記録することができ、ランニングコストが安く、ノンインパクト方式であるため騒音が少なく、しかも、多種類のインク(例えばカラーインク)を使用してカラー画像を記録するのが容易であるなどの利点を有している。
特に、熱エネルギーを利用してインクを吐出する記録ヘッドは、エッチング、蒸着、スパッタリング等の半導体製造プロセスを経て、基板上に製膜された電気熱変換体、電極、液路壁、天板などを形成することにより、高密度の液路配置(吐出口配置)を有するものを容易に製造することができ、一層のコンパクト化を図ることができる。また、IC技術やマイクロ加工技術の長所を活用することにより記録手段の長尺化や面状化(2次元化)が容易であり、記録手段のフルマルチ化及び高密度実装化も容易である。また、記録媒体の材質に対する要求も様々なものがあり、通常の紙やや樹脂薄板(OHP等)などの他に、布、皮革、不織布、さらには金属やセラミックス等を用いることもある。
上記インクジェット記録装置においては、記録ヘッドの吐出面に形成された微細な吐出口からインクを吐出することから、該吐出面に固着インク、紙粉、インク滴等の異物が付着すると吐出不良の原因となることがあり、そのため、記録ヘッドの吐出面を定期的あるいは所定のタイミングでクリーニングすることが行われている。このクリーニングに関する技術は、例えば特開平6−340082号公報、特開平7−9674号公報及び特開平7−52396号公報に記載されている。
図13はインクジェット記録装置の外観を例示する模式的斜視図であり、図14は図13のインクジェット記録装置において上カバー121を取り外した状態を示す模式的斜視図である。図13及び図14において、インクジェット記録装置は、左右の脚部180で支持された装置本体100、装置本体の前部に設けられた開閉可能なロールホルダユニット122、透明で開閉可能な上カバー121、排紙された記録媒体を積載するスタッカ123などを備えている。ロールホルダユニット122内に保持されたロール状の記録紙が装置本体100内の記録部へ給紙される。装置本体100の図示右側には、インクタンク130等を含むインク供給ユニット320、並びに記録ヘッド201のインク吐出性能を維持回復するための回復ユニット300が配設されている。
給紙されたロール紙は搬送ローラ110により記録部を通して搬送される。記録部には、装置本体に左右方向に設置されたガイドレールに沿って往復移動可動なキャリッジ200が配設され、該キャリッジ上に記録ヘッド201が搭載されている。記録ヘッド201を搭載したキャリッジ200の往復移動は、不図示のキャリッジモータによりタイミングベルト270を介して駆動される。なお、矢印Aは記録媒体の搬送方向(副走査方向)を示し、矢印Bはキャリッジ200(従って記録ヘッド201)の往復移動方向(主走査方向)を示す。なお、符号260は、記録ヘッド201に接続される電気配線やインク供給チューブ等を束ねるためのキャタピラを示す。
回復ユニット300には、記録ヘッド 201の吐出口の目詰まりによる記録品位の低下を防止するための吸引回復処理、記録中や吸引回復後に吐出口周辺に付着するインク等を払拭除去するためのワイピング処理などを行うための回復手段が設けられている。
図15は図14中の回復ユニット300の内部構成を示す模式的斜視図であり、図16は図15中の線16−16(キャリッジ移動方向と交差する方向、矢印Aで示す記録媒体搬送方向と平行な方向)に沿った模式的縦断面図である。
図15及び図16において、301Aは吐出口を覆うためのキャップであり、ゴム等の弾性部材で形成されている。このキャップで吐出面をキャッピングした状態で、該キャップに接続された負圧発生手段(後述するチューブポンプ等)により該キャップ内を負圧にすることにより、記録ヘッドの吐出口からインクを吸引するとともに該吐出口内にフレッシュなインクを導入する吸引回復処理を行うことができる。キャップ301Aの開閉動作を行うキャッピング手段は、該キャップの他に、キャップベース301D、キャップばね301E、キャップレバー301C、回復カム301B、回復モータ301Fなどで構成されている。
回復モータ301Fの駆動力は、ギアを介して回復カム301B→キャップレバー301Cへ伝達され、該キャップレバーに連結されているキャップベース301Dが上方(図16中の矢印G方向)へ移動する。キャップベース301Dにはキャップ301Aが上下方向移動可能に取り付けられており、その間に圧縮ばねであるキャップばね301Eが装着されている。このため、キャップ301Aはキャップばね301Eの付勢力によって記録ヘッド201の吐出面に当接する。また、キャップ301Aを吐出面から離間させるときは、回復モータ301Fを回転させることで回復カム301B等を介してキャップベース301Dを降下(離脱)させる。
回復カム301Bは各々の作動状態(例えば、キャップのオン、オフ状態)により回転位置が決められており、回復カム301Bの回転位置を制御することにより各々の作動状態を実現している。その制御は、不図示のセンサとセンサフラグにより決められた回復カムのホームポジションからの回転角度を制御することで行われる。負圧発生手段であるチューブポンプ302は、可撓性チューブであるポンプチューブ302Aをコロ302Bで矢印方向にしごくことにより、該ポンプチューブの内容積を変化させ、該ポンプチューブ内に負圧を発生させる。
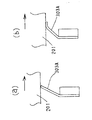
ワイピング手段303は、ゴム等の弾性材料の板状部材からなるワイパーブレード303Aを備えている。このワイパーブレード303Aを図15及び図16中の矢印A方向に移動させて記録ヘッド201の吐出面に摺接させることにより、該吐出面に付着したインク等の異物を払拭除去するワイピング動作(回復動作の一つ)が行われる。図17は図16中のワイパーブレード303Aが記録ヘッド201の吐出面を摺擦する状態を示す模式図であり、(a)は先端部で摺接(払拭)する状態を、(b)は腹の部分で摺接(払拭)する状態を示す。ワイピング動作においては、図17の(a)に示すように先端部が摺接するときに最も優れたワイピング効果(拭き取り効果)を発揮する。
一方、図17の(b)に示すように腹の部分が摺接するときには、充分なワイピング効果を得ることができない。図17の(b)のように腹の部分で摺接する状態では、ワイパーブレード303Aを吐出面に強く押し付けることになるので、該吐出面を傷めやすく、耐久性を確保するためには吐出面の強度を向上させる必要があり、大幅コストアップを招くことになる。従って、ワイパーブレードの吐出面に対する侵入量(オーバーラップ量)は、ワイピング性能を維持する上で重要な要素であり、記録ヘッドとワイパーブレードとの相対位置(図示の例では上下方向の位置関係)を高精度に位置決め(位置出し)する必要がある。
図18はインクジェット記録装置において記録ヘッド201と記録媒体との隙間を調整するための位置調整手段の一例を示す模式的斜視図である。記録媒体の厚みの差による記録ヘッドと記録媒体との隙間(OH間距離、紙間距離)の変化を吸収(補正)するために、記録ヘッド201(キャリッジ200)の高さ位置(上下位置)を変更する位置調整手段(図18)を設けることが行われている。図18において、キャリッジ200をガイドレール(キャリッジ軸)45により揺動可能に案内支持するとともに、該キャリッジの反対側の部位にキャリッジコロ200aを上下位置調節可能に取り付け、該キャリッジコロをキャリッジ軸45に対して矢印方向に位置調節することによりキャリッジ200を該キャリッジ軸を中心に矢印方向に揺動させることで、記録ヘッドと記録媒体との隙間を調節するように構成されている。
しかしながら、図15及び図16に示すようなワイピング機構(ワイピング手段の構成)では、キャリッジ200の高さ切換により、その分だけワイパーブレード303Aの吐出面に対する侵入量が適正値から外れてしまい、前述したようにワイピング性能が悪化するという不都合がある。このような不都合を解決することを目的とする構成が特開平5−69540号公報(特許文献1)に開示されている。図19はこの特許文献1に記載されたキャッピングユニットの構成を示す模式的正面図である。図19において、回復ユニットを構成するキャッピングユニット31には、キャリッジ21上の記録ヘッド2の吐出面をキャッピングするためのキャップ27が装着されている。
そこで、キャッピングユニット31にはカム溝32が形成されており、回復ユニットのベース側(静止側)に設けられた軸33が前記軸32にスライド自在に嵌合されている。キャッピングユニット31は装置本体に対してキャリッジ21の移動方向に所定距離だけ移動可能に装着されており、ばね34によって常に初期位置にむけて付勢されている。また、キャッピングユニット31には、キャリッジ21と当接可能な係合突起35が設けられている。カム溝32は、キャッピングユニット31が左右にスライド(移動)することで上下に移動する(高さ位置が変化する)ように形成されている。
図20は図19の構成に改良を加えた回復ユニット300及びキャリッジ200を示す模式的正面図であり、(a)はキャリッジが回復ポジションに到達する直前の状態を示し、(b)はキャリッジが回復ポジションにきて回復ユニットに当接した状態を示す。図20において、キャリッジ200に案内ガイド200bが設けられ、回復ユニット300に当接面300bが設けられている。さらに、回復ユニット300とシャーシ(又はベース部材)との間には、該回復ユニットを上方へ付勢する(押し上げる)ばね300cが装着されている。
キャリッジ200が回復ポジションにくると、図20の(b)に示すように、案内ガイド200bが当接面300bに当接し、回復ユニット300を若干押し下げることによりキャリッジ200と回復ユニット300の間の高さ方向の相対位置が正確に位置出しされている。図20に示すような構成によれば、図18に示すようなキャリッジ高さ切換機構によってキャリッジ200の高さ位置を切り換えたとしても、回復ユニット300とキャリッジ200の高さ方向の相対位置が常に一定となるように高精度で位置出しされている。従って、キャリッジ200の高さ位置を調節したとしても、記録ヘッドの吐出面に対するワイパーブレードの侵入量(オーバーラップ量)が常に一定に保たれるので、該ワイパーブレードの侵入量を常に適正な値に高精度で保つことができる。
以上説明したような回復ユニットの退避構造については、特開平5−69540号公報(引用文献1)、特開2001−270126(特許文献2)及び特開2002−19151(特許文献3)に記載されている。しかし、引用文献1及び引用文献3に記載された構成では、キャリッジの往復動範囲内に回復ユニットが配置されておらず、図15に示す寸法bを無くしたり小さくすることはできない。また、引用文献2に記載された構成では、記録媒体の通紙範囲内に回復ユニットが配置されているため、回復動作のための機構が複雑かつ大型になり、非常なコストアップを招くことになる。
特開平5−69540号公報
特開2001−270126号公報
特開2002−19151号公報
以下、図面を参照して本発明の実施形態を具体的に説明する。なお、各図面を通して同一符号は同一又は対応部分を示すものである。図1は本発明によるインクジェット記録装置の一実施形態を示す模式的斜視図である。図2は図1中の回復ユニット50を斜め上方から見た模式的斜視図である。図3は図2の回復ユニット50上の回復ポジションにキャリッジ14が位置するときの状態を示す模式的側面図である。図1において、インクジェット記録装置1は内部に種々の部品や部材が収納されている筐体4を備え、この筺体4は左右両側に互いに向き合って配置された2つの架台2A、2Bの上端部に跨がるように固定されている。筺体4の内部には、左右方向に所定間隔離れて互いに向き合う不図示の2枚の支持板(側板)が固定されている。
これらの支持板の間には、記録媒体が搬送される搬送方向(矢印A方向であり副走査方向)と交差する主走査方向(矢印B方向)に延びるキャリッジレール16を有するメインステイ15が配置されている。このメインステイ15の長手方向両端部はそれぞれ前記左右の支持板に固定されている。キャリッジ14の後部に形成された摺動溝(不図示)がキャリッジレール16に摺動自在に嵌合され、該キャリッジ14の前部にはキャリッジローラ(不図示)が回転自在に軸支されている。キャリッジ14上の前記摺動溝と前記キャリッジローラとの間に記録手段である記録ヘッド201が搭載されている。
前記キャリッジローラは、キャリッジレール16と平行に延びるローラレールの上面に接触しながら転動する。このローラレールもその両端部で前記支持板に固定されている。キャリッジ14は、キャリッジレール16を中心に上下方向に揺動可能ではあるが、前記キャリッジローラを介して前記ローラレールで下方への回動を阻止されることで、記録ヘッド201の一定の高さに保持する所定の姿勢で左右方向(矢印B方向)に往復移動可能に案内支持されている。キャリッジレール16の両端部の近傍に配置された不図示の駆動プーリと従動プーリとの間に張架された無端ベルト(タイミングベルト)の一部がキャリッジ14に連結されており、装置本体に装着されたキャリッジモータ(不図示)により前記駆動プーリを回転させることによりキャリッジ14が主走査方向に移動する。
前記キャリッジモータは、キャリッジ駆動制御部(図示せず)から送信されてくる駆動制御パルス信号に基づいて制御される。キャリッジ14には、例えば、イエロー、マゼンタ、シアン、ブラック、淡シアン、淡マゼンタなどの各インク色ごとの記録ヘッド201が搭載されており、各記録ヘッドに対してインク供給ユニット320内の各色のインクタンク130からチューブ等を通して対応するインクが供給される。前記各チューブは、キャリッジ14の移動によっても暴れることがないように、キャタピラ260によって束ねられている。記録ヘッド201には、不図示のヘッド制御部から記録動作のための駆動信号が送られてくる。
この駆動信号は画像データに基づいて形成されたものであり、キャリッジ14の移動に同期して記録ヘッド201を駆動することにより記録媒体に所定の画像を記録することができる。図1に示す記録装置は、ロールホルダ部122のスプールに巻回された記録媒体であるロール紙を搬送ローラ(不図示)で巻出して給紙搬送しながら、キャリッジ14上の記録ヘッド201による主走査とこの搬送ローラによる副走査とを交互に繰り返しながら1ラインずつ記録していくことで全体の画像を記録していくシリアルタイプのインクジェット記録装置である。なお、本実施形態では記録媒体がロール紙である場合を例示するが、これは、カットシート(カット状のシート)等他の形態の記録媒体を使用するインクジェット記録装置であっても良い。
図1において、記録動作中のキャリッジ14の往復動範囲内であって記録媒体の通紙範囲を外れた位置(例えば図21に示すような記録媒体101の通紙範囲の外側)には、記録ヘッド201のインク吐出性能を維持回復するための回復ユニット50が配設されている。図1の記録装置では、キャリッジ14の往復動範囲内であって、前述した右側の支持板の外側に図2中に斜線領域で示すようなキャリッジ待機領域8が形成されている。キャリッジ待機領域8における所定の基準位置(ホームポジション)に、前記回復ユニット50が配設されている。この回復ユニット50には、記録ヘッド201のインク吐出性能を初期の状態のように維持回復すべく、該記録ヘッドのクリーニング等の回復処理を行うためのキャッピング手段、ワイピング手段及び吸引手段等の回復手段が一体化されて組み込まれている。
図4は図2中の線4−4の沿った回復ユニット50のキャリッジ移動方向と交差する方向の模式的縦断面図である。次に、図2〜図4を参照して回復ユニット50について説明する。図2〜図4において、回復ユニット50は固定ユニット49と可動ユニット52からなり、可動ユニット52は固定ユニット49に対して上下方向に移動可能(高さ切換可能)に組み付けられている。固定ユニット49の内部には、吸引回復のための負圧発生手段であるチューブポンプ50Cが装着されている。可動ユニット52の内部には、回復手段を構成するキャッピング手段(キャップ部)50A及びワイピング手段(ワイパー部)50Bが装着されている。また、固定ユニット49には、可動ユニット52を上下動させるための駆動源であるリフトモータ61が装着されている。このリフトモータ61はチューブポンプ50Cを作動させるための駆動源と共用されるものである。
キャッピング手段50Aは回復ポジションに位置する記録ヘッド201の吐出面に対してキャップ50A1を当接離間することで吐出口を密閉開放するものであり、ワイピング手段50Bは回復ポジションに位置する記録ヘッド201の吐出面にワイパーブレード50B1(図17のワイパーブレード303Aに対応する)を摺接させてインク等を払拭除去するものである。負圧発生源であるチューブポンプ50Cはキャッピング手段50Aのキャップ50A1に接続されている。つまり、チューブポンプ50Cは、記録ヘッド201をキャッピングした状態でキャップ50A1内に負圧を発生させることにより吐出口からインクを吸い出して該吐出口内のインクをリフレッシュする吸引回復処理を行うための吸引手段であり、これらは周知の構造のものである。
可動ユニット52内にはキャッピング手段50A及びワイピング手段50Bの駆動源である回復モータ53が装着されている。さらに、可動ユニット52内には、回復モータ53の駆動伝達を制御するための回復カム51及びカムレバー54が装着されている。キャッピング手段50Aのキャップ50A1の上下動(吐出面との密着離間動作)、並びにワイピング手段50Bのワイパーブレード50B1の払拭動作(吐出面との摺接動作)は、回復モータ53を駆動源とする回復カム51及びカムレバー54の運動により行われる。つまり、回復手段であるキャッピング手段50A及びワイピング手段50Bを動作させるための機構も可動ユニット52内に装着されている。
回復カム51は、各々の作動状態(例えば、キャッピング状態、キャップ開放状態、ワイピング状態など)ごとに予め回転位置が決められており、回復カム51を各回転位置にすることで各々の作動状態になるように制御されている。この制御は、不図示の位置検出センサとセンサフラグにより決められた回復カム51のホームポジションからの回転角度を制御することにより行われる。例えば、キャッピング状態がホームポジションから30度の位置に設定されている場合は、キャッピング動作は回復モータ53による回復カム51の回転位置が30度になったことを検知したときに止めるように制御される。
可動ユニット52は、固定ユニット49に対し、該固定ユニットに設けられた上下方向の案内軸400a、400bに沿って上下方向(矢印C方向)に摺動自在に案内支持されている。そして、固定ユニット49内に、可動ユニット52の高さ位置を切り換える(調整)するためのリフトモータ61と、可動ユニット52を上方向へ付勢する付勢部材(ばね部材等)が設けられている。
次に、回復ユニット50の記録ヘッド201に対する高さ方向の相対位置を位置決めするための位置出し手段について説明する。図3(キャリッジ14が回復位置に位置するときの側面図)において、キャリッジ14の底部近傍には案内面14b1、14b2が形成されており、可動ユニット52の上部近傍には当接面52b1、52b2が形成されている。記録ヘッド201を搭載したキャリッジ14が回復ユニット50の真上に位置するときに、可動ユニット52を上昇させて当接面52b1、52b2をキャリッジ14の案内面14b1、14b2に当接させることができる。また、キャリッジ14の案内面14b1、14b2と可動ユニット52の当接面52b1、52b2がばね付勢力等で押圧接触すると、可動ユニット52はばね付勢力等に抗して図3中の矢印F方向(下方)へ所定量だけ押し下げられる。
すなわち、案内面14b1、14b2が当接面52b1、52b2に当接することにより、記録ヘッド201の吐出面に対する回復ユニット50の可動ユニット52の高さ方向の位置出しが高精度で行われる。本実施形態では、可動ユニット52の当接面52b1、52b2とワイピング手段50Bのワイパーブレードとの高さ方向相対位置は常に一定であるので、この位置出しによって、記録ヘッドの吐出面に対するワイパーブレード50B1の侵入量を一定の適正値に高精度で維持することができる。つまり、記録媒体の厚み等に対応してキャリッジ(記録ヘッド)の高さを調整するような場合でも、吐出面に対するワイパーブレード50B1の侵入量を常に適正値に維持することができ、ワイピング性能を高く維持するとともに、吐出面の耐久性向上を図ることができる。
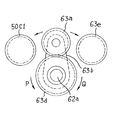
図5は回復ユニット50の固定ユニット49を底面から(図3中の矢印X方向から)見た模式的底面図である。図6は回復ユニット50をリフトレバー部65でキャリッジ移動方向と交差する方向に断面した模式的縦断面図である。図7は回復ユニット50においてキャリッジ14が該回復ユニットの上にきたときに可動ユニット52を下方へ移動させて該キャリッジがフリーになった状態もしくは記録ヘッド201がワイピング可能になった状態を示す模式的側面図である。図8は回復ユニット50の固定ユニット49内のリフトギア列63の模式的斜視図である。図9は図8のリフトギア列の中の駆動伝達切換用の振り子ギア63aの構成例を示す模式図である。図10は回復ユニット50の固定ユニット49内のリフトカム部64を示す模式的斜視図である。図11は回復ユニット50の固定ユニット49内のリフトレバー部65を示す模式的斜視図である。図12は図11のリフトレバー部65の模式的縦断面図である。
本実施形態の特徴的な構成は、回復手段として、記録ヘッド201の吐出面を払拭するためのワイピング手段50Bと、記録ヘッドの吐出口を覆うためのキャッピング手段50Aとを有し、この回復手段の記録ヘッドに対する高さ位置を切り換えるための位置切換手段が設けられ、この位置切換手段を、キャッピング手段50Aに接続された負圧発生源50Cと共通の駆動源61で駆動する点にある。また、本実施形態では、記録媒体の厚み等に応じて記録ヘッド201との隙間を調整するために該記録ヘッドの位置(キャリッジ14の高さ位置)を変更するための位置調整手段が設けられている。この位置調整手段は、図18を参照して前述した構成と実質的に同じ構成のものである。すなわち、キャリッジ14をガイドレール(キャリッジ軸)16により揺動可能に案内支持するとともに、該キャリッジの反対側の部位にキャリッジコロを上下位置調節可能に取り付け、該キャリッジコロをガイドレール16に対して矢印方向に位置調節することによりキャリッジ14を該ガイドレール16を中心に矢印方向に揺動させることで、記録ヘッド201と記録媒体との隙間を調節するように構成されている。
先ず、図3〜図12を参照して、可動ユニット52を上下動させて高さ位置を切り換えるための位置切換手段の構成について説明する。図3〜図12において、固定ユニット49はプラスチック一体成形品である筐状のベース部材60を有し、このベース部材60の内部に、吸引ポンプであるチューブポンプ部50C、該チューブポンプの駆動源と可動ユニット52の位置切換手段の駆動源を兼ねるリフトモータ61、該リフトモータの駆動を伝達する伝達ギア62、可動ユニット52を上下動する駆動を伝達するためのリフトギア列63、可動ユニット52の上下位置を規制するためのリフトカム部64、並びに、該リフトカム部の動きを可動ユニット52に伝達するためのリフトレバー部65が装着されている。
共通の駆動源であるリフトモータ61は、正転することでチューブポンプ50Cを駆動し、逆転することで可動ユニット52を上動させるリフトカム部64を駆動する。伝達ギア62はリフトモータ61の出力ギアと噛み合っている。リフトギア列63は図8に示すように複数のギアで構成されており、その中に図9に示すような機能構成を有する振り子ギア63aが組み込まれている。この振り子ギア63aは、リフトモータ61が正転する場合はポンプギア50C1を介して駆動をチューブポンプ50Cへ伝達し、リフトモータ61が逆転する場合はリフトギア列63を介して駆動をリフトカム部64へ伝達するものである。
リフトカム部64は、図10に示すようにその両端部でベース部材60に回転自在に軸支されており、その入力ギア64bはリフトギア列63の出力ギア63cと噛み合っている。従って、リフトカム部64にはリフトモータ61の逆転時の駆動が伝達され、リフトカム部64が回転することにより外周カム面64a(3箇所)に当接しているリフトレバー部65(3組)が動かされる(揺動させられる)。このリフトレバー部65の動作は、リフトカム部64に設けられた不図示のセンサとセンサフラグによって制御される。つまり、センサ及びセンサフラグによってリフトカム部64を予め決められた回転角度に制御することにより、リフトレバー部65の動作を制御することができる。この場合のセンサとしては、例えば、LEDとフォトダイオードの組み合わせて該LEDの光を該フォトダイオードで検出する構成のセンサが使用される。
リフトレバー部65は図6、図11及び図12に示すような構成を有し、図10に示すリフトカム部64に設けられた3個の外周カム面64aのそれぞれに対応して同様の構造のリフトレバー部65が3セット(3組)設けられている。リフトレバー部65は、基端部の回動中心(又は回動軸)65bで固定ユニット49に揺動可能に軸支されるとともに先端部65cでリフトカム部64のカム面64a(図10)に当接するレバー本体65aを有する。レバー本体65aには補助レバー65dが軸部65eを中心に揺動可能に軸支されている。この補助レバー65dの先端部はばね65fによって上向きに付勢されるとともに通常ではレバー本体65aのストッパ部65gに突き当たっている。
補助レバー65dには、ほぼ鉛直方向に延びる連結ロッド65hの下端部が取り付けられている。この連結ロッド65hは、固定ユニット49のベース部材60に形成されたガイド部(不図示)によって上下方向にのみ移動可能に案内されており、その上端部で可動ユニット52に連結されている。以上の構成で、リフトカム部64のカム面64aによってレバー本体65aを上方へ揺動させると、補助レバー65dを介して連結ロッド65hが上方へ移動させられ、可動ユニット52が上方へ移動させられる。
そして、可動ユニット52の当接面52b1、52b2がキャリッジ14の案内面14b1、14b2に当接すると、補助レバー65d及び連結ロッド65hの上昇は停止するが、レバー本体65aは上方へもう少しだけ動くことになる。このレバー本体65aの上方への移動量は、該レバー本体と補助レバー65dとの間に装着されたばね(圧縮ばね)65fの圧縮変位の分である。そして、ばね65fは、この圧縮変位の分、チャージされることになる。このチャージされた荷重は、可動ユニット52の重量とキャッピング手段50Aのキャッピング荷重(キャップ50A1を吐出面に押し付ける力)とを合計した荷重よりも大きくなるように設定されている。これによって、可動ユニット52をキャリッジ14(又は記録ヘッド201)に対して安定した状態で当接させることができる。
次に、図8及び図9を参照して、リフトギア列63に設けられた振り子ギア63aの構成及び動作について説明する。図8及び図9において、伝達ギア62と同軸で一体回転する入力ギア63dが設けられ、この入力ギア63dの軸部には所定の回転抵抗(例えば摩擦抵抗)をもって嵌合された揺動可動なアーム63bが軸支されている。このアーム63bには入力ギア63dと常時噛み合っている振り子ギア63aが回転自在に軸支されている。この振り子ギア63aの両側には、いずれか一方に噛み合い可能な位置関係で、チューブポンプ50Cに駆動を伝達するポンプギア50C1と、リフトギア列63の駆動伝達用のギア63eとが存在している。
この構成で、リフトモータ61の正転によって入力ギア63dが矢印P方向に回転すると、アーム63bは入力ギア63dとの間の回転抵抗によって図9中の反時計方向に揺動する。これによって、振り子ギア63aがポンプギア50C1と噛み合うことになり、リフトモータ61の駆動がチューブポンプ(吸引手段)50Cに伝達されることになる。一方、リフトモータ61の逆転によって入力ギア63dが矢印Q方向に回転すると、アーム63bは入力ギア63dとの間の回転抵抗によって図9中の時計方向に揺動し、これによって、振り子ギア63aがリフトギア列63のギア63eと噛み合うことになり、リフトモータ61の駆動がリフトカム部64を介してリフトレバー部65へ伝達され、可動ユニット52の上下動が駆動されることになる。
次に、以上の構成を有する位置切換手段による可動ユニット52の上下動作について説明する。装置本体の制御装置から可動ユニット52を上方移動させる指令が出されると、リフトモータ61を逆転させる。この逆転の駆動力は、伝達ギア62→リフトギア列63→リフトカム部64→リフトレバー部65へ伝わる。このとき、リフトギア列63には振り子ギア63aがあるため、この駆動力はチューブポンプ50Cへは伝達されない。センサ及びセンサフラグによりリフトカム部64が予め決められた回転角度になると、リフトモータ61を止めるように制御する(例えば、センサの信号検出により90度の回転角度で止めるよう制御する)。
この上方移動による上記の動作でリフトモータ61を止めた状態では、リフトカム部64によりリフトレバー部65のレバー本体65aが上向きに揺動されることで、可動ユニット52は上方へ移動してキャリッジ14と当接する。つまり、前述したように、可動ユニット52の当接面52b1、52b2がキャリッジ14の案内面14b1、14b2に当接する。このとき、前述した補助レバー65dの揺り戻しによってばね65fがチャージされた状態となっているため、可動ユニット52は安定した状態でキャリッジ14に当接している。
装置本体の制御装置から可動ユニット52を下方移動させる指令が出されると、この場合もリフトモータ61を逆転させる。この逆転の駆動力は、伝達ギア62→リフトギア列63→リフトカム部64→リフトレバー部65へ伝わる。このときも、この駆動力はチューブポンプ50Cへは伝達されない。センサ及びセンサフラグによりリフトカム部64が予め決められた回転角度になると、リフトモータ61を止めるように制御する(例えば、センサの信号検出により270度の回転角度で止めるよう制御する)。
この下方移動による動作でリフトモータ61を止めた状態では、リフトカム部64によりリフトレバー部65のレバー本体65aが下向きに揺動されることで、可動ユニット52は下方へ移動してキャリッジ14との当接を解除され、さらにばね65fのチャージも解除された状態となる。この状態では、図7に示すように、キャリッジ14は可動ユニット52から離隔してフリーの状態になっている。つまり、リフトカム部64のカム形状(外周カム面64a)は、1回転(360度)において、可動ユニット52の高さ位置(記録ヘッド201と記録媒体の間の隙間方向の位置)を上昇位置と下降位置に切り換え制御できるように形成されている。
次に、固定ユニット49に装着された負圧発生手段であるチューブポンプ50Cの駆動について説明する。チューブポンプ50Cは、回転部材に軸支されたコロ(又はローラ)によって可撓性チューブであるポンプチューブをしごいていくことで、該ポンプチューブ内の容積変化を利用して負圧を発生されるものであり、種々の構造のものが知られている。装置本体の制御装置からチューブポンプ50Cを駆動する指令が出されると、リフトモータ61を正転させる。この正転の駆動力は、伝達ギア62→リフトギア列63の振り子ギア63ab伝達され、該振り子ギア63aの作用によってポンプギア50C1へ伝達され、リフトカム部64へは伝達されない。
リフトモータ61の駆動がチューブポンプ50Cのポンプギア50C1へ伝達されることで、該ポンプギアに接続された不図示の回転部材が回転し、該回転部材の偏心位置に軸支されたコロによってポンプチューブがしごかれることで該ポンプチューブ内に負圧が発生する。この負圧はチューブを通して可動ユニット52上のキャッピング手段50Aのキャップ50A1内へ導入可動であり、記録ヘッド201の吐出口を該キャップで密閉した状態(キャッピング状態)で負圧を発生させることにより、吐出口からインクを吸引して該吐出口内のインクをリフレッシュするための吸引回復処理が行われる。
次に、この吸引回復処理に関する動作について説明する。可動ユニット52が下降した状態でキャリッジ14を回復ユニット50上のキャリッジ待機領域部8(図2)へ移動させる。そして、可動ユニット52を上方へ移動させてキャリッジ14に当接させることで、両者の高さ方向の位置出しが行われる。この当接状態(位置出し状態)では、キャリッジ14自体がいかなる高さ位置(記録媒体との隙間方向の調整位置)にあろうとも、ワイピング手段50Bのワイパーブレード50B1の吐出面に対する侵入量(オーバーラップ量)を適正な一定値に保つことができる。
そこで、可動ユニット52内の回復モータ53により回復カム51を駆動し、カムレバー54の動きによりキャップ50A1を上昇させて記録ヘッド201の吐出口を密閉する。そして、固定ユニット49内のチューブポンプ50Cを駆動して吐出口からインクを吸引する。次いで、回復モータ53によりワイピング手段50Bを駆動することでワイパーブレード50B1により吐出面の払拭動作(クリーニング動作)を行う。このような回復手段による記録ヘッド201の回復動作を行った後、可動ユニット52を下降させる。
以上の本実施形態によれば、記録ヘッド201の吐出面に対するワイパーブレード50B1の侵入量を適正に保つための可動ユニット52の当接動作の駆動源と負圧発生源であるチューブポンプ50Cの駆動源とを共用することができる。同時に、負圧発生源が装着された固定ユニット49は上下動しないように固定配置にするので、可動ユニット52と固定ユニット49からなる回復ユニット50をコンパクトにすることができ、記録装置の小型化に資することができる。
なお、以上の実施形態では、ロール紙に記録するインクジェット記録装置の場合を例に挙げて説明したが、本発明は、カットシートに記録するインクジェット記録装置の場合にも同様に適用されるものであり、同様の作用効果を奏するものである。また、本発明は、1個の記録ヘッドを用いる装置、異なる色のインクを用いる複数の記録ヘッドを用いる装置、あるいは同一色彩で異なる濃度のインクを用いる複数の記録ヘッドを用いる装置、さらには、これらを組み合わせた記録装置の場合にも、同様に適用することができ、同様の作用効果を奏するものである。