JP4644792B2 - 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 - Google Patents
衛星航法システムにおける電離層遅延量の補正方法及びその装置。 Download PDFInfo
- Publication number
- JP4644792B2 JP4644792B2 JP2007246609A JP2007246609A JP4644792B2 JP 4644792 B2 JP4644792 B2 JP 4644792B2 JP 2007246609 A JP2007246609 A JP 2007246609A JP 2007246609 A JP2007246609 A JP 2007246609A JP 4644792 B2 JP4644792 B2 JP 4644792B2
- Authority
- JP
- Japan
- Prior art keywords
- ionospheric delay
- navigation system
- satellite navigation
- correcting
- gps receiver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Description
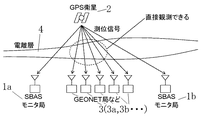
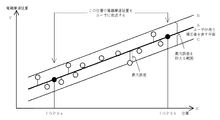
図1〜図2は、この発明の第1の実施例を示すもので、図1は本願の電離層遅延量の補正方法を説明するための模式図、図2は本願の電離層遅延量の補正値に関する信頼区間を求める方法を説明するための模式図である。
2 GPS衛星
3(3a、3b、3c・・) GPS受信機
4 電離層
5(5a、5b・・・) IGP
A ユーザが使用する電離層遅延量の推定値を表す平面
B、C IGP5a及びIGP5bとの間に配置されたGPS受信機3(3a、3b、3c・・・)でそれぞれ測定した測定値と平面Aとの差の上限及び下限を示す範囲で、最大誤差の範囲
Claims (11)
- 航法衛星からの測位信号により電離層遅延量およびその他の補正情報を作成するための複数のモニタ局を既知点にそれぞれ配置し、
前記モニタ局以外の地点に、前記航法衛星からの測位信号をそれぞれ受信してそれぞれ電離層遅延量を測定するための複数のGPS受信機を配置し、
電離層遅延量の推定値を、航法衛星からの測位信号により求めて送信する衛星航法システムにおける電離層遅延量の補正方法において、
前記航法衛星からの測位信号を受信して、互いに隣接して四角形を形成する4つのIGPにおける電離層遅延量をそれぞれ求め、
この互いに隣接する4つのIGPにおける電離層遅延量を補間して、4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面をそれぞれ求め、
前記GPS受信機により測定された電離層遅延量の測定値を、それぞれGPS受信機毎に求め、
前記4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面と、前記GPS受信機毎に求めた電離層遅延量の測定値との差を、前記GPS受信機毎にそれぞれ求め、
この差の最大値を、電離層遅延量の推定値に関する信頼区間の補正情報とすること
を特徴とする衛星航法システムにおける電離層遅延量の補正方法。 - 既知点に配置した前記モニタ局は、SBASのモニタ局を用いること
を特徴とする請求項1に記載の衛星航法システムにおける電離層遅延量の補正方法。 - 前記GPS受信機の代わりに、既存のGPS観測網から得られる電離層遅延量の測定値を用いること
を特徴とする請求項1に記載の衛星航法システムにおける電離層遅延量の補正方法。 - 前記既存のGPS観測網として、GEONETにおける電子基準点の測定値を用いること
を特徴とする請求項3に記載の衛星航法システムにおける電離層遅延量の補正方法。 - 前記既存のGPS観測網として、AWGSのGPS受信機の測定値を用いること
を特徴とする請求項3に記載の衛星航法システムにおける電離層遅延量の補正方法。 - 複数の既知点にそれぞれ配置され、航法衛星からの測位信号により電離層遅延量およびその他の補正情報を作成するためのモニタ局と、
前記モニタ局以外の地点に配置され、前記航法衛星からの測位信号を受信して、それぞれ電離層遅延量を測定するための複数のGPS受信機と、
電離層遅延量の推定値を、航法衛星からの測位信号により求めて送信する統制局とからなる衛星航法システムにおける電離層遅延量を補正する装置において、
前記統制局は、互いに隣接して四角形を形成する4つのIGPにおける電離層遅延量を補間して4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面をそれぞれ求める機能と、前記4つのIGPに囲まれる領域内の地点における電離層遅延量を表す平面と前記GPS受信機毎に求めた電離層遅延量の測定値との差をそれぞれ求める機能と、求めた前記GPS受信機毎の差の中からその差が最大となる最大値を求める機能と、差の最大値を電離層遅延量の推定値に関する信頼区間の補正情報として送信する機能とを有すること
を特徴とする衛星航法システムにおける電離層遅延量を補正する装置。 - 前記統制局は、前記モニタ局の機能も兼ね備えること
を特徴とする請求項6に記載の衛星航法システムにおける電離層遅延量を補正する装置。 - 既知点に配置した前記モニタ局は、SBASのモニタ局を用いること
を特徴とする請求項6〜請求項7にそれぞれ記載の衛星航法システムにおける電離層遅延量を補正する装置。 - 前記GPS受信機の代わりに既存のGPS観測網から得られる電離層遅延量の測定値を受信する機能を有すること
を特徴とする請求項6〜請求項8にそれぞれに記載の衛星航法システムにおける電離層遅延量を補正する装置。 - 前記既存のGPS観測網として、GEONETの電子基準点における電離層遅延量の測定値を受信する機能を有すること
を特徴とする請求項9に記載の衛星航法システムにおける電離層遅延量を補正する装置。 - 前記既存のGPS観測網として、AWGSのGPS受信機の電離層遅延量の測定値を受信する機能を有すること
を特徴とする請求項9に記載の衛星航法システムにおける電離層遅延量を補正する装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007246609A JP4644792B2 (ja) | 2007-09-25 | 2007-09-25 | 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007246609A JP4644792B2 (ja) | 2007-09-25 | 2007-09-25 | 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009075035A JP2009075035A (ja) | 2009-04-09 |
| JP4644792B2 true JP4644792B2 (ja) | 2011-03-02 |
Family
ID=40610131
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007246609A Expired - Fee Related JP4644792B2 (ja) | 2007-09-25 | 2007-09-25 | 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4644792B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170115786A (ko) * | 2016-04-08 | 2017-10-18 | 한국전자통신연구원 | 선박기준국 추가에 의한 sbas 시스템을 위한 정지 궤도 위성의 정밀 궤도 결정 방법 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5305413B2 (ja) * | 2010-03-25 | 2013-10-02 | 独立行政法人電子航法研究所 | 衛星航法システムにおける測位誤差の補正方法及びその装置。 |
| CN103792546B (zh) * | 2012-10-31 | 2016-03-09 | 中国科学院光电研究院 | 一种增量式电离层折射误差修正方法 |
| JP6029707B2 (ja) * | 2015-04-20 | 2016-11-24 | 三菱電機株式会社 | 測位装置 |
| JP2017173164A (ja) | 2016-03-24 | 2017-09-28 | カシオ計算機株式会社 | 受信制御装置、受信制御方法及びプログラム |
| KR101941132B1 (ko) * | 2017-05-02 | 2019-01-23 | 한국항공대학교산학협력단 | 국지적 전리층지도의 가용영역 확장 장치 및 방법 |
| CN114303075A (zh) * | 2019-09-05 | 2022-04-08 | 日本电气方案创新株式会社 | 定位辅助设备、定位辅助方法以及计算机可读记录介质 |
| WO2021245889A1 (ja) * | 2020-06-04 | 2021-12-09 | 日本電気株式会社 | 情報処理装置、情報提供システム、情報処理方法、および情報処理用プログラムが記憶された記憶媒体 |
| WO2021245888A1 (ja) * | 2020-06-04 | 2021-12-09 | 日本電気株式会社 | 情報処理装置、情報提供システム、情報処理方法、および情報処理用プログラムが記憶された記憶媒体 |
| JP7471618B1 (ja) | 2023-07-28 | 2024-04-22 | イエローテイル・ナビゲーション株式会社 | 衛星航法システムにおける測位誤差の原因の比較試験方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2339099B (en) * | 1995-10-24 | 2000-05-31 | Inmarsat Ltd | Satellite radiodetermination |
| JP4109370B2 (ja) * | 1999-01-26 | 2008-07-02 | 日本無線株式会社 | 衛星航法補強システム |
| JP2003018061A (ja) * | 2001-06-27 | 2003-01-17 | Nec Corp | 衛星航法監視システム |
| JP2004198291A (ja) * | 2002-12-19 | 2004-07-15 | Toshiba Corp | 測位システム、測位補助システムおよび測位装置 |
| JP2005121394A (ja) * | 2003-10-14 | 2005-05-12 | Hitachi Ltd | 位置算出用データ送受信装置、ならびに位置算出用データ送受信法 |
| JP4780382B2 (ja) * | 2005-11-02 | 2011-09-28 | 独立行政法人 宇宙航空研究開発機構 | 電離層遅延量推定システム |
| JP2007171082A (ja) * | 2005-12-26 | 2007-07-05 | Nec Toshiba Space Systems Ltd | 電離層遅延補正方法、電離層遅延補正システム、地上局および移動局 |
| JP2007187597A (ja) * | 2006-01-16 | 2007-07-26 | Hitachi Ltd | 測位システムおよび端末 |
-
2007
- 2007-09-25 JP JP2007246609A patent/JP4644792B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170115786A (ko) * | 2016-04-08 | 2017-10-18 | 한국전자통신연구원 | 선박기준국 추가에 의한 sbas 시스템을 위한 정지 궤도 위성의 정밀 궤도 결정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009075035A (ja) | 2009-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4644792B2 (ja) | 衛星航法システムにおける電離層遅延量の補正方法及びその装置。 | |
| JP6545273B2 (ja) | 測位衛星選択装置、測位情報発信装置および測位システム | |
| US10690775B2 (en) | Crowdsourcing atmospheric correction data | |
| Paziewski et al. | Assessment of GPS+ Galileo and multi-frequency Galileo single-epoch precise positioning with network corrections | |
| JP5419031B2 (ja) | 天頂対流圏遅延量の推定値の算出方法 | |
| JP7074599B2 (ja) | 航法衛星システム受信装置、その航法衛星信号処理方法及びプログラム | |
| US20140077991A1 (en) | Enhanced broadcast ephemeris for high accuracy assisted gps positioning | |
| JP6262248B2 (ja) | 衛星地理位置情報測定における誤差レベルを推定すると共に前記推定の信頼性を監視する方法および関連装置 | |
| US20150247931A1 (en) | Locally enhanced gnss wide-area augmentation system | |
| JP7568249B1 (ja) | 衛星航法システムにおける補正情報の生成方法,補正情報を生成する情報処理装置及びプログラム | |
| CN102016620A (zh) | 用于计算电离层校正的网络和方法 | |
| CN105044747A (zh) | 一种基于多星共视和滤波的时间同步装置及其方法 | |
| JP4745144B2 (ja) | 電離層モデル補正方法 | |
| JP2024143939A (ja) | 衛星航法システムにおける測位誤差の補正方法、測位誤差を補正する情報処理装置及びプログラム | |
| KR101429474B1 (ko) | 항법위성의 배치정보를 이용한 위성항법 보강 시스템 및 위성항법 보강 방법 | |
| JP4723932B2 (ja) | 測位システム | |
| JP7550426B1 (ja) | 衛星航法システムにおける測位精度の指示方法及び測位精度を指示するプログラム | |
| JP2010276605A (ja) | モバイルデバイスの位置の決定方法 | |
| JP7591242B1 (ja) | 衛星航法システムにおける測位誤差の補正方法,測位誤差を補正する情報処理装置及びプログラム | |
| JP2013044576A (ja) | 人工衛星ベースの受信機に対するsbas支援情報を持ったagpsサーバ | |
| JP2018204953A (ja) | 測位用受信機、方法、記録媒体及びコンピュータプログラム | |
| Rho et al. | The usefulness of WADGPS satellite orbit and clock corrections for dual-frequency precise point positioning | |
| JP2005049147A (ja) | 測位方法及び測位情報提供装置 | |
| CN119087484A (zh) | 一种面向电网的rtk定位方法和系统 | |
| Park et al. | An efficient positioning method for multi-GNSS with multi-SBAS |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101109 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4644792 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |