JP4635753B2 - ステアリング装置 - Google Patents
ステアリング装置 Download PDFInfo
- Publication number
- JP4635753B2 JP4635753B2 JP2005203436A JP2005203436A JP4635753B2 JP 4635753 B2 JP4635753 B2 JP 4635753B2 JP 2005203436 A JP2005203436 A JP 2005203436A JP 2005203436 A JP2005203436 A JP 2005203436A JP 4635753 B2 JP4635753 B2 JP 4635753B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- wheel
- angle
- shaft
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Description
ハンドルの回転に応じて前後輪を転舵する前輪転舵機構および後輪転舵機構を備え、各車輪と各転舵機構との間に、各車輪の切れ角に関数関係を与える非円形歯車列としての車輪操向歯車を介装したステアリング装置において、
前記前輪転舵機構および後輪転舵機構は、
車幅方向に配置され、車幅方向に配し軸心回りに回転可能なステアリングシャフトと、
前記ハンドルの回転に応じて前記ステアリングシャフトを回転させるステアリングシャフト駆動手段と、
前記ステアリングシャフトの回転を前記車輪操向歯車に伝達する第2交差軸歯車と、
この第2交差軸歯車の入力軸と前記ステアリングシャフトの端部とを連結する等速ジョイントと、
を備え、
内輪切れ角をα、外輪切れ角をβ、前後輪の車軸間距離をL、左右キングピン間距離をWとしたとき、
前記車輪操向歯車の外輪駆動側ピッチ曲線を、入力側と出力側の歯車の比が一定となる円弧とし、
前記車輪操向歯車の内輪駆動側ピッチ曲線を、前記外輪駆動側ピッチ曲線で決まる外輪切れ角βに対し、内輪切れ角αが所定切れ角α0未満のとき、下記の式(1)
W/L=cotβ−cotα …(1)
に示すアッカーマン・ジャントの式を満たし、
前記内輪切れ角αが所定切れ角α0以上のとき、下記の式(2)
2W/L=cotβ−cotα …(2)
を満たすように設定したことを特徴とする。
図1は、実施例1のステアリング装置の全体構成図である。
実施例1のステアリング装置は、前輪転舵機構Aと、後輪転舵機構Bと、コントロールユニット(転舵モータ出力制御手段)21と、アクチュエータドライバ22と、を備えている。
[車輪操向歯車のピッチ特性]
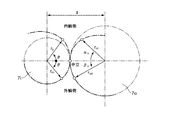
図2は、実施例1の車輪操向歯車7fR,7fLのピッチ曲線を示したものである。図2において、7iは第2交差軸歯車6fR,6fLと一体に回転する入力側歯車、7oは車輪のナックル回転軸と一体に回転する出力側歯車を示す。
W/L=cotβ−cotα …(1)
内輪切れ角αが所定切れ角α0以上では、下記の式(2)
2W/L=cotβ−cotα …(2)
を満たすピッチ曲線となるように設定されている。
ここで、Lは前後輪の車軸間距離を、Wは左右キングピン間距離を表す。図中、rii,roiは、内輪駆動側の入出力ギヤのピッチ径を表し、rio,rooは、外輪駆動側のピッチ径を表し、これらの和(roi+rii,roo+rio)は車輪操向歯車7fR,7fLの軸間距離aに等しい。
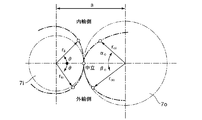
図3は、アッカーマン・ジャントの式(式(1))を満たす操舵機構の原理図であり、車輪中心とキングピン軸との距離をゼロとして描いている。図3において、OE/CE=cotα、OF/DF=cotβであり、よって式(1)が成立する。
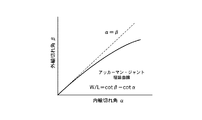
実施例1では、通常走行時の2輪操舵モードでは、内外輪の切れ角α,βは式(1)の関係を満たし、旋回中心は後輪車軸の延長線上に位置する。図4は、この条件での内外輪の切れ角α,βの関係を示す。アッカーマン・ジャントの理論曲線では、切れ角が大きくなるほど内輪側の切れ角のほうがより大きくなっていく。
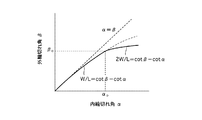
図5は、実施例1のステアリング装置における内外輪の切れ角の関係を示す。図5において、OE/CE=cotα、OF/DF=cotβであり、よって式(2)が成立する。
実施例1では、内輪切れ角αが所定切れ角α0以上の領域では、式(2)を満たすように車輪操向歯車7fR,7fLのピッチ曲線を設定したため、小回り操舵モードでは、図4に示した2輪操舵モードでの条件よりも内輪切れ角αが大きくなる。
実施例1のステアリング装置にあっては、以下に列挙する効果が得られる。
(1) ハンドル1の回転に応じて前後輪を転舵する前輪転舵機構Aおよび後輪転舵機構Bを備え、各車輪と各転舵機構との間に、各車輪の切れ角に関数関係を与える非円形歯車列(7fR,7fL),(7rR,7rL)を介装したステアリング装置において、内輪切れ角をα、外輪切れ角をβ、前後輪の車軸間距離をL、左右キングピン間距離をWとしたとき、車輪操向歯車(7fR,7fL),(7rR,7rL)の外輪駆動側ピッチ曲線を、比が一定となる円弧とし、車輪操向歯車(7fR,7fL),(7rR,7rL)の内輪駆動側ピッチ曲線を、外輪駆動側ピッチ曲線で決まる外輪切れ角βに対し、内輪切れ角αが所定切れ角α0未満のとき、アッカーマン・ジャントの式(式(1))を満たし、内輪切れ角αが所定切れ角α0以上のとき、式(2)を満たすように設定した。よって、いずれの操舵モードにおいてもスムーズな走行を実現でき、旋回性能を向上させることができる。
実施例2のステアリング装置にあっては、実施例1の効果(1)〜(6)に加え、以下の効果が得られる。
以上、本発明を実施するための最良の形態を、実施例1,2に基づいて説明したが、本発明の具体的な構成は、実施例1,2に限定されるものではなく、例えば、内輪切れ角が所定切れ角以上の車輪操向歯車のピッチ曲線は、必ずしも式(2)と一致させる必要はなく、式(2)に近づくように設定すればよい。
B 後輪転舵機構
1 ハンドル
2 コラムシャフト
2f 操舵角センサ
2r モータ角度センサ
3 第1交差軸歯車
4f,4r ステアリングシャフト
5fR,5rR 右等速ジョイント
5fL,5rL 左等速ジョイント
6fR,6rR 右第2交差軸歯車
6fL,6rL 左第2交差軸歯車
7fR,7rR 右車輪操向歯車
7fL,7rL 左車輪操向歯車
8fR,8rR 右車輪
8fL,8rL 左車輪
9f 操舵力アシストモータ
9r 転舵モータ
21 コントロールユニット
22 モータドライバ
Claims (5)
- ハンドルの回転に応じて前後輪を転舵する前輪転舵機構および後輪転舵機構を備え、各車輪と各転舵機構との間に、各車輪の切れ角に関数関係を与える非円形歯車列としての車輪操向歯車を介装したステアリング装置において、
前記前輪転舵機構および後輪転舵機構は、
車幅方向に配置され、車幅方向に配し軸心回りに回転可能なステアリングシャフトと、
前記ハンドルの回転に応じて前記ステアリングシャフトを回転させるステアリングシャフト駆動手段と、
前記ステアリングシャフトの回転を前記車輪操向歯車に伝達する第2交差軸歯車と、
この第2交差軸歯車の入力軸と前記ステアリングシャフトの端部とを連結する等速ジョイントと、
を備え、
内輪切れ角をα、外輪切れ角をβ、前後輪の車軸間距離をL、左右キングピン間距離をWとしたとき、
前記車輪操向歯車の外輪駆動側ピッチ曲線を、入力側と出力側の歯車の比が一定となる円弧とし、
前記車輪操向歯車の内輪駆動側ピッチ曲線を、前記外輪駆動側ピッチ曲線で決まる外輪切れ角βに対し、内輪切れ角αが所定切れ角α0未満のとき、下記の式(1)
W/L=cotβ−cotα …(1)
に示すアッカーマン・ジャントの式を満たし、
前記内輪切れ角αが所定切れ角α0以上のとき、下記の式(2)
2W/L=cotβ−cotα …(2)
を満たすように設定したことを特徴とするステアリング機構。 - ハンドルの回転に応じて前後輪を転舵する前輪転舵機構および後輪転舵機構を備え、各車輪と各転舵機構との間に、各車輪の切れ角に関数関係を与える非円形歯車列としての車輪操向歯車を介装したステアリング装置において、
前記前輪転舵機構および後輪転舵機構は、
車幅方向に配置され、車幅方向に配し軸心回りに回転可能なステアリングシャフトと、
前記ハンドルの回転に応じて前記ステアリングシャフトを回転させるステアリングシャフト駆動手段と、
前記ステアリングシャフトの回転を前記車輪操向歯車に伝達する第2交差軸歯車と、
この第2交差軸歯車の入力軸と前記ステアリングシャフトの端部とを連結する等速ジョイントと、
を備え、
内輪切れ角をα、外輪切れ角をβ、前後輪の車軸間距離をL、左右キングピン間距離をWとしたとき、
前記車輪操向歯車の外輪駆動側ピッチ曲線を、前記ハンドルの操舵角が大きくなるほど、ハンドルの操舵角に対する切れ角がより大きくなるように設定し、
前記車輪操向歯車の内輪駆動側ピッチ曲線を、前記外輪駆動側ピッチ曲線で決まる外輪切れ角βに対し、内輪切れ角αが所定切れ角α 0 未満のとき、下記の式(1)
W/L=cotβ−cotα …(1)
に示すアッカーマン・ジャントの式を満たし、
前記内輪切れ角αが所定切れ角α 0 以上のとき、下記の式(2)
2W/L=cotβ−cotα …(2)
を満たすように設定したことを特徴とするステアリング機構。 - 請求項1または請求項2に記載のステアリング装置において、
前記前輪転舵機構は、前記ステアリングシャフト駆動手段として、前記ハンドルと連結されたコラムシャフトの回転を前記ステアリングシャフトに伝達する第1交差軸歯車を備えることを特徴とするステアリング装置。 - 請求項3に記載のステアリング装置において、
前記前輪転舵機構は、前記ハンドルと連結されたコラムシャフトまたは前記ステアリングシャフトに操舵力アシストモータを備えることを特徴とするステアリング装置。 - 請求項3ないし請求項4のいずれか1項に記載のステアリング装置において、
前記後輪転舵機構は、前記ステアリングシャフト駆動手段として、前記ステアリングシャフトに連結された転舵モータを備え、
前記ハンドルの操舵角度と操舵速度を検出する操舵状態検出手段と、
検出された操舵角度および転舵速度と車速とに基づいて、後輪の最適な操舵量を算出し、前記転舵モータの出力を制御する転舵モータ出力制御手段と、
を設けたことを特徴とするステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005203436A JP4635753B2 (ja) | 2005-07-12 | 2005-07-12 | ステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005203436A JP4635753B2 (ja) | 2005-07-12 | 2005-07-12 | ステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007022158A JP2007022158A (ja) | 2007-02-01 |
| JP4635753B2 true JP4635753B2 (ja) | 2011-02-23 |
Family
ID=37783505
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005203436A Expired - Fee Related JP4635753B2 (ja) | 2005-07-12 | 2005-07-12 | ステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635753B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5282485B2 (ja) * | 2008-08-26 | 2013-09-04 | 日産自動車株式会社 | ステアリング装置及び操舵輪操舵方法 |
| JP5332446B2 (ja) * | 2008-09-25 | 2013-11-06 | 日産自動車株式会社 | ステアリング装置付きサスペンション |
| JP5428360B2 (ja) * | 2009-02-03 | 2014-02-26 | 日産自動車株式会社 | ステアリング装置 |
| JP5321225B2 (ja) * | 2009-04-24 | 2013-10-23 | 日産自動車株式会社 | ステアリング装置 |
| WO2013033917A1 (zh) * | 2011-09-09 | 2013-03-14 | 长沙中联重工科技发展股份有限公司 | 汽车转向控制方法与系统以及汽车 |
| FR3010965B1 (fr) * | 2013-09-20 | 2017-08-18 | Exel Ind | Ensemble comprenant un chassis pour engin a voie variable tel qu’un engin agricole du type pulverisateur ou engin enjambeur |
| KR102221838B1 (ko) * | 2014-11-10 | 2021-03-03 | 현대모비스 주식회사 | 조향 보상 기능을 갖는 전동식 조향 장치 및 그 동작 방법 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02136377A (ja) * | 1988-11-18 | 1990-05-24 | Toyota Motor Corp | 前後輪操舵車の後輪操舵装置 |
| JP3237872B2 (ja) * | 1991-07-24 | 2001-12-10 | 科学技術振興事業団 | 非円形歯車を用いたステアリング機構 |
| JP2913974B2 (ja) * | 1991-12-27 | 1999-06-28 | 日産自動車株式会社 | 後輪舵角制御装置 |
| JP3313241B2 (ja) * | 1994-07-12 | 2002-08-12 | 隆 加藤 | アッカーマン式ステアリング機構 |
-
2005
- 2005-07-12 JP JP2005203436A patent/JP4635753B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007022158A (ja) | 2007-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635754B2 (ja) | ステアリング装置 | |
| EP2824016B1 (en) | Steering device | |
| US7233850B2 (en) | Vehicle steering apparatus | |
| JP2004345592A (ja) | 車両の操舵装置 | |
| JP4635753B2 (ja) | ステアリング装置 | |
| JP5332446B2 (ja) | ステアリング装置付きサスペンション | |
| KR102620426B1 (ko) | 조향 장치 | |
| JPH01175577A (ja) | 後輪転舵機構 | |
| EP1342609B1 (en) | Steering mechanism of electric car | |
| KR20090060523A (ko) | 장륜차량의 암형 현가장치용 조향장치 | |
| JP2007515336A (ja) | 四輪駆動自動車の駆動装置 | |
| JP3076541B2 (ja) | 操向車輪制御構造 | |
| WO2014203574A1 (ja) | ステアリング装置 | |
| JP5226999B2 (ja) | 車両の操舵装置 | |
| JP3770048B2 (ja) | 操舵装置 | |
| JP2005193779A (ja) | 車両用操舵装置 | |
| JPH0649463B2 (ja) | 車両の4輪操舵装置 | |
| KR101216291B1 (ko) | 반능동형 조향장치 | |
| JP3582334B2 (ja) | パワーステアリング装置 | |
| KR20090070229A (ko) | 6x6 휠타입 차량의 전륜조향 제어 시스템 및 방법 | |
| JPS63184576A (ja) | 自動車用後輪操舵装置 | |
| JP4135600B2 (ja) | 車両用操舵装置 | |
| JP2009006876A (ja) | 操舵装置、自動車及びラックハウジング取り付け方法 | |
| JP4941722B2 (ja) | 車両用操舵装置 | |
| KR100514867B1 (ko) | 차량의 조향 복원장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |