JP4635376B2 - ナビゲーション装置及びナビゲーションプログラム - Google Patents
ナビゲーション装置及びナビゲーションプログラム Download PDFInfo
- Publication number
- JP4635376B2 JP4635376B2 JP2001154500A JP2001154500A JP4635376B2 JP 4635376 B2 JP4635376 B2 JP 4635376B2 JP 2001154500 A JP2001154500 A JP 2001154500A JP 2001154500 A JP2001154500 A JP 2001154500A JP 4635376 B2 JP4635376 B2 JP 4635376B2
- Authority
- JP
- Japan
- Prior art keywords
- current location
- road
- voice
- vehicle
- correction instruction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
Description
【発明の属する技術分野】
本発明は、ナビゲーション装置及びナビゲーションプログラムに関するものである。
【0002】
【従来の技術】
従来、自動車等の車両に搭載されたナビゲーション装置においては、運転者等の操作者が所定の入力部を操作して目的地を設定すると、該目的地、及び、現在地検出処理部によって検出された車両の現在地に基づいて、該現在地から目的地までの経路が探索され、探索された経路が案内される。この場合、現在地は、ジャイロセンサ、GPSセンサ等の各種センサからのセンサ信号に基づいて求められた現在地を地図情報から得た道路の形状等と比較して、決定されるようになっている。
【0003】
しかし、前記センサ信号に基づいて求められる現在地の精度は、十分に高いものではなく、ある程度の誤差を含むものである。このため、現在地を道路の形状等と比較する時に、市街地のように複数の道路が密集している場所においては、誤った道路を選択して現在地を決定してしまうことがある。この場合、ナビゲーション装置には、車両が実際に走行している道路と相違する道路上に車両の現在地が表示されることになる。
【0004】
このように誤った道路を選択して現在地を決定する可能性の高い場合としては、例えば、地上の一般道と高架の高速道路とが平行しているように、複数の道路が多層になって同方向に延在している場合、一般道の横に高速道路が平行しているように、複数の道路が平行して同方向に延在している場合、高速道路の合流分岐点のように、道路が枝分かれしている場合等がある。
【0005】
そして、ナビゲーション装置が指示する進路変更地点や進路変更方向は、地図情報から得た道路の情報に基づいて決定されるので、現在地が誤った道路上にあると、その後に指示される進路変更地点や進路変更方向も誤ったものになってしまうという問題が発生する。
【0006】
そこで、該問題を解決するために、表示された車両の現在地の誤りに気が付いた場合に、操作者が現在地を修正することができる機能を有するナビゲーション装置が提供されている。
【0007】
これにより、ナビゲーション装置において現在地が修正されるので、その後に指示される進路変更地点や進路変更方向は正確で信頼することができるものとなる。
【0008】
【発明が解決しようとする課題】
しかしながら、前記従来のナビゲーション装置においては、ナビゲーション装置本体やリモートコントローラに配設されたボタン、スイッチ、ジョグダイヤル、十文字キー等の手動入力手段を操作して、現在地の修正を行うようになっている。ところが、一般的なナビゲーション装置は、車両の走行中に前記手動入力手段の操作を行うことができないような装置を備えているので、表示された車両の現在地の誤りに気が付いた場合であっても、操作者は車両を停止させないと現在地の修正を行うことができないようになっている。
【0009】
また、前記装置を備えていない場合であっても、操作者が車両の運転者である時は、運転中に手動入力手段の操作を行うことが事実上不可能であるので、現在地の修正を行うために車両を停止させる必要がある。
【0010】
しかし、道路が混雑している時に車両を停止させることは困難であり、道路状況によっては、路側に車両を移動させることができない場合もある。このような場合には、車両を停止させることが可能な場所に到達するまで、現在地の修正を行うことができないので、操作者が表示された車両の現在地の誤りに気が付いた場合であっても、長時間にわたり現在地が誤った状態が継続してしまうことになる。すなわち、ナビゲーション装置が有効に機能しない状態が継続することになってしまう。
【0011】
特に、高速道路上では、道路上で車両を停止させることが禁じられているので、次のパーキングエリアに到達するまで現在地の修正を行うことができない。そして、パーキングエリアの間隔は一般に相当長いので、一般道路を走行中の場合と比較すると極めて長時間にわたり、ナビゲーション装置が有効に機能しない状態が継続することになってしまう。
【0012】
また、現在地の修正を行う度に車両を停止させなくてはならないので、操作者は煩わしく感じてしまう。
【0013】
本発明は、前記従来のナビゲーション装置の問題点を解決して、ナビゲーション装置に表示された車両の現在地の誤りに気が付いた場合、操作者が音声によって現在地の修正を指示すると、音声による指示を認識し、該指示に従って現在地を修正することによって、現在地の修正を容易に行うことができるナビゲーション装置及びナビゲーションプログラムを提供することを目的とする。
【0014】
【課題を解決するための手段】
そのために、本発明のナビゲーション装置においては、複数のマッチング候補の中から現在地を決定するナビゲーション装置において、音声による現在地修正指示を認識する音声認識手段と、前記現在地修正指示に従って、現在地を修正する現在地修正手段とを有し、前記現在地修正指示は現在地に対する修正すべき位置の方向である。
【0015】
本発明の他のナビゲーション装置においては、さらに、前記現在地修正手段は、前記現在地修正指示に適合するマッチング候補を修正後の現在地とする。
【0019】
本発明のナビゲーションプログラムにおいては、複数のマッチング候補の中から現在地を決定するナビゲーションのためにコンピュータを、音声による現在地修正指示を認識する音声認識手段、及び、前記現在地修正指示に従って、現在地を修正する現在地修正手段として機能させるナビゲーションプログラムであって、前記現在地修正指示は現在地に対する修正すべき位置の方向である。
【0020】
【発明の実施の形態】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0021】
図2は本発明の第1の実施の形態におけるナビゲーション装置の概念図、図3は本発明の第1の実施の形態におけるナビゲーション装置の機能を示す図である。
【0022】
図において、14はコンピュータとしてのナビゲーション装置であり、該ナビゲーション装置14は、現在地を検出する現在地検出処理部15、道路データ等が記録された記録媒体としてのデータ記録部16、入力された情報に基づいて、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、入力部34、表示部35、音声入力部36、音声出力部37及び通信部38を有し、前記ナビゲーション処理部17に車速センサ41が接続される。
【0023】
そして、前記現在地検出処理部15は、GPS(Global Positioning System)センサ21、地磁気センサ22、距離センサ23、ステアリングセンサ24、ビーコンセンサ25、ジャイロセンサ26、図示されない高度計等から成る。なお、前記GPSセンサ21、地磁気センサ22、距離センサ23、ステアリングセンサ24、ビーコンセンサ25、ジャイロセンサ26、高度計等の中のいくつかは、製造コスト等の観点から、適宜省略することもできる。
【0024】
そして、前記GPSセンサ21は、人工衛星によって発生させられた電波を受信することによって地球上における現在地を検出し、前記地磁気センサ22は、地磁気を測定することによって車両が向いている方位を検出し、前記距離センサ23は、道路上の所定の位置間の距離等を検出する。前記距離センサ23としては、例えば、図示されない車輪の回転数を測定し、該回転数に基づいて距離を検出するもの、加速度を測定し、該加速度を2回積分して距離を検出するもの等を使用することができる。
【0025】
また、前記ステアリングセンサ24は、舵(だ)角を検出し、前記ステアリングセンサ24としては、例えば、図示されないステアリングホイールの回転部に取り付けられた光学的な回転センサ、回転抵抗センサ、車輪に取り付けられた角度センサ等が使用される。
【0026】
そして、前記ビーコンセンサ25は、道路に沿って配設されたビーコンからの位置情報を受信して現在地を検出する。前記ジャイロセンサ26は、車両の回転角速度、すなわち、旋回角を検出し、前記ジャイロセンサ26としては、例えば、ガスレートジャイロ、振動ジャイロ等が使用される。そして、前記ジャイロセンサ26によって検出された旋回角を積分することによって、車両が向いている方位を検出することができる。
【0027】
なお、前記GPSセンサ21及びビーコンセンサ25は、それぞれ単独で現在地を検出することができる。そして、距離センサ23によって検出された距離と、地磁気センサ22及びジャイロセンサ26によって検出された方位とを組み合わせることによって現在地を検出することもできる。また、距離センサ23によって検出された距離と、ステアリングセンサ24によって検出された舵角とを組み合わせることによって現在地を検出することもできる。
【0028】
前記データ記録部16は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイル、写真データファイル、及び、各地域のホテル、ガソリンスタンド、観光地案内所等の施設の情報が記録された施設情報データファイルから成るデータベースを備える。そして、前記データ記録部16には、経路を探索するためのデータの他、前記表示部35の画面に、探索された経路に沿って案内図を表示したり、交差点又は経路における特徴的な写真、コマ図等を表示したり、次の交差点までの距離、次の交差点における進行方向等を表示したり、他の案内情報を表示したりするための各種のデータが記録される。なお、前記データ記録部16には、所定の情報を音声出力部37によって出力するための各種のデータも記録される。
【0029】
ところで、前記交差点データファイルには交差点に関する交差点データが、ノードデータファイルにはノード点に関するノードデータが、道路データファイルには道路に関する道路データがそれぞれ記録され、前記交差点データ、ノードデータ及び道路データによって道路状況が画面に表示される。なお、前記ノードデータは、前記地図データファイルに記録された地図データにおける少なくとも道路の位置及び形状を構成するものであり、実際の道路の分岐点(交差点、T字路等を含む)、ノード点、及び各ノード点間を連結するリンクを示すデータから成る。また、前記ノード点は、少なくとも道路の屈曲点の位置を示す。
【0030】
そして、前記道路データには、道路自体について、幅員、勾(こう)配、カント、高度、バンク、路面の状態、道路の車線数、該車線数の減少する地点、幅員の狭くなる地点等のデータが含まれる。また、コーナについては、曲率半径、交差点、T字路、コーナの入口等のデータが含まれる。さらに、道路属性については、踏切、高速道路出入口ランプウェイ、高速道路の料金所、降坂路、登坂路、道路種別(国道、一般道、高速道等)等のデータが含まれる。
【0031】
また、前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行うCPU31、該CPU31が各種の演算処理を行うに当たりワーキングメモリとして使用されるRAM32、及び、制御プログラムの他、目的地までの経路の探索、経路中の走行案内、特定区間の決定等を行うための各種のプログラムが記録された記録媒体としてのROM33から成る。そして、前記ナビゲーション処理部17には、前記入力部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。なお、前記音声入力部36、音声出力部37及び通信部38の中のいくつかは、製造コスト等の観点から、適宜省略することもできる。
【0032】
ここで、前記プログラムには、ナビゲーションのためにコンピュータを、音声による現在地修正指示を認識する音声認識手段、及び、前記現在地修正指示に従って、現在地を修正する現在地修正手段として機能させるナビゲーションプログラムも含まれる。また、該ナビゲーションプログラムを記録したコンピュータ読み取り可能な記録媒体は、半導体メモリだけでなく、磁気テープ、磁気ディスク、磁気ドラム、CD−ROM、MD、DVD−ROM、光ディスク、MO、ICカード、光カード、メモリカード等、あらゆる形態の記録媒体を含むものである。
【0033】
なお、前記データ記録部16及びROM33は、図示されない磁気コア、半導体メモリ等によって構成される。また、前記データ記録部16及びROM33として、磁気テープ、磁気ディスク、磁気ドラム、CD−ROM、MD、DVD−ROM、光ディスク、MO、ICカード、光カード、メモリカード等の各種の記憶媒体を使用することもできる。該記憶媒体は、ナビゲーション装置14にあらかじめ据付られたものであってもよく、運転者等によって適宜交換可能なものであってもよい。
【0034】
本実施の形態においては、前記ROM33に各種のプログラムが記録され、前記データ記録部16に各種のデータが記録されるようになっているが、プログラム及びデータを同じ外部記憶媒体に記録することもできる。この場合、例えば、前記ナビゲーション処理部17に図示されないフラッシュメモリ等の記憶媒体を配設し、前記外部記憶媒体から前記プログラム及びデータを読み出して前記記憶媒体に書き込むこともできる。したがって、外部記憶媒体を交換することによって前記プログラム及びデータを更新することができる。また、図示されない自動変速機制御装置の制御プログラム等も前記外部記憶媒体に記録させることができる。このように、各種の記憶媒体に記録されたプログラムを起動し、データに基づいて各種の処理を行うことができる。なお、前記外部記憶媒体は、磁気テープ、磁気ディスク、磁気ドラム、CD−ROM、MD、DVD−ROM、光ディスク、MO、ICカード、光カード、メモリカード等、いかなる種類のものであってもよい。
【0035】
さらに、前記通信部38は、FM送信装置、電話回線、インターネット、携帯電話網等との間で各種のデータの送受信を行うためのものであり、例えば、図示されない情報センサ等によって受信した渋滞等の道路情報、交通事故情報、GPSセンサ21の検出誤差を検出するD−GPS情報等の各種のデータを受信する。また、本発明の機能を実現するためのプログラム、ナビゲーション装置14を動作させるためのその他のプログラム、データ等を、情報センタ(インターネットサーバ、ナビゲーション用サーバ等)から複数の基地局(インターネットのプロバイダ端末、前記通信部38と電話回線、通信回線等を介して接続された通信局等)に送信し、更に各基地局から通信部38に送信することもできる。このようなシステムを使用する場合、各基地局から送信された前記プログラム、及びデータの少なくとも一部が受信されると、前記CPU31は、読書き可能なメモリ、例えば、RAM32、フラッシュメモリ、ハードディスク等の記録媒体にダウンロードし、前記プログラムを起動し、データに基づいて各種の処理を行うことができる。
【0036】
この場合、例えば、プログラム及びデータを異なる記録媒体に記録したり、同じ記録媒体に記録したりすることもできる。
【0037】
また、家庭用のパソコンを使用し、前記情報センタから送信されたプログラム、データ等をパソコンに対して脱着自在なメモリカード、フレキシブルディスク等の記録媒体にダウンロードし、前記プログラムを起動し、データに基づいて各種の処理を行うこともできる。
【0038】
そして、前記入力部34は、走行開始時の位置を修正したり、目的地を入力したりするためのものであり、ナビゲーション装置14の本体に配設された操作キー、押しボタン、ジョグダイヤル、十字キー等からなるものであるが、リモートコントローラであってもよい。なお、表示部35がタッチパネルである場合には、表示部35の画面に表示された操作キー、操作メニュー等の操作スイッチから成るものであることが望ましい。この場合、通常のタッチパネルのように前記操作スイッチを押す(タッチする)ことによって、入力を行うことができる。
【0039】
そして、前記表示部35には、操作案内、操作メニュー、操作キーの案内、現在地から目的地までの経路、該経路に沿った案内情報等が表示される。前記表示部35としては、CRTディスプレイ、液晶ディスプレイ、LEDディスプレイ、プラズマディスプレイ、フロントガラスにホログラムを投影するホログラム装置等を使用することができる。
【0040】
また、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、音声情報、例えば、音声合成装置によって合成された音声から成る案内情報、変速情報等をスピーカから出力し、操作者に知らせる。なお、音声合成装置によって合成された音声の他に、各種の音、あらかじめテープ、メモリ等に録音された各種の案内情報をスピーカから出力することもできる。
【0041】
本実施の形態において、ナビゲーション装置14は、機能の観点から、入力された音声による現在地修正指示を認識する音声認識手段27、前記現在地修正指示に従って、現在地を修正する現在地修正手段28、及び、現在地決定手段29を有するものである。
【0042】
ここで、前記音声認識手段27は、例えば、前記音声入力部36に「上の道」という音声が入力されると、現在地を上方に位置する高架の道路に移動させるという現在地修正指示であると認識して、該修正指示を現在地修正手段28に送信する。また、「一般道」という音声が入力されると、現在地を近接する一般道に移動させるという現在地修正指示であると認識して、該修正指示を現在地修正手段28に送信する。さらに、「右の道」という音声が入力されると、現在地を車両の進行方向に対して右側に位置する道路に移動させるという現在地修正指示であると認識して、該修正指示を現在地修正手段28に送信する。
【0043】
なお、前記音声認識手段27は、現在地修正指示だけでなく他の種類の指示、例えば、目的地設定、経路探索開始、施設検索開始等の音声による指示を認識するものであってもよい。そして、前記音声認識手段27は、学習機能を有するものであることが望ましく、例えば、操作者の音声をあらかじめ繰り返し入力して学習させることによって、操作者の音声による指示の認識精度が向上するものであることが望ましい。
【0044】
また、音声による複数種類の指示を認識するものである場合、音声認識処理の負担を低減して処理速度及び認識精度を向上させるために、キーワードによる絞り込み機能を有するものであってもよい。この場合、例えば、現在地修正を指示しようとする時、操作者が、まず、「現在地修正」と音声によって指示すると、音声認識手段27は、次の指示は現在地修正指示であると判断して、現在地修正指示を認識するために必要とされる認識辞書を準備し、他の指示を認識するために必要な認識辞書を認識検索の対象から外す処理を行う。これにより、認識検索の対象範囲を限定することができるので、音声認識処理の処理速度及び認識精度が向上する。
【0045】
そして、前記現在地修正手段28は、音声認識手段27から送信された現在地修正指示に従って、現在地決定手段29が決定した現在地を修正するための現在地修正処理を実行する。
【0046】
ここで、前記現在地決定手段29は、現在地検出処理部15によって検出された現在地をデータ記録部16に格納された道路に関する各種データと比較して、現在地が道路上に位置するように決定するためのマップマッチング処理を実行するようになっている。
【0047】
この場合、前記現在地検出処理部15によって検出された現在地の精度にはある程度の誤差が含まれるので、検出された現在地は地図上の点としてではなく、一定の面積を有する領域として考えられる。そして、ある程度道路が密集している場合、前記領域内に複数の道路が存在することになる。そのため、マップマッチング処理を実行すると、複数の道路が前記現在地が位置する道路としての候補、すなわち、マッチング候補として選択される。
【0048】
そこで、前記現在地決定手段29においては、道路データ等に基づいて、すべてのマッチング候補に対し、前記現在地が位置する道路として不適切なポイント、すなわち、ペナルティを算出し、該ペナルティの最も低い道路を選択し、その道路上に現在地が表示されるように決定する。そして、表示部35の画面に表示された地図においては、前記ペナルティの最も低い道路上に現在地が表示される。なお、ペナルティとは検出された現在地と道路までの距離や過去の現在地の軌跡等に基づき算出されるもので、ペナルティが小さいマッチング候補程、現在地の可能性が高い。
【0049】
ここで、前記現在地修正手段28は、現在地修正指示を受信すると、該現在地修正指示に適合するマッチング候補を選択する。例えば、現在地を上方に位置する高架の道路に移動させるという現在地修正指示を受信した場合、前記現在地決定手段29が決定したペナルティの最も低い道路よりも上方に位置する、すなわち、高度の高いマッチング候補を選択する。そして、該マッチング候補としての道路上に現在地が位置するように修正する。また、現在地を近接する一般道に移動させるという現在地修正指示を受信した場合、前記現在地決定手段29が決定したペナルティの最も低い道路に近接し、一般道であるマッチング候補を選択する。そして、該マッチング候補としての道路上に現在地が位置するように修正する。さらに、現在地を右側に位置する道路に移動させるという現在地修正指示を受信した場合、前記現在地決定手段29が決定したペナルティの最も低い道路に近接し、該道路よりも車両の進行方向に対して右側に位置するマッチング候補を選択する。そして、該マッチング候補としての道路上に現在地が位置するように修正する。
【0050】
このようにして、現在地が修正されると、ナビゲーション装置14は、修正された現在地に基づいて、ナビゲーション処理を実行する。そのため、表示部35の画面に表示された地図において表示されている現在地も修正される。また、必要な場合、目的地までの経路探索も再度行われる。
【0051】
次に、前記構成のナビゲーション装置14の動作について説明する。
【0052】
図1は本発明の第1の実施の形態における現在地修正処理の例を示す第1のフローチャート、図4は本発明の第1の実施の形態における現在地修正処理の例を示す第2のフローチャート、図5は本発明の第1の実施の形態における現在地修正処理の例を示す第3のフローチャートである。
【0053】
まず、操作者は、表示部35の画面に表示された地図において表示されている現在地が誤りであることに気がつく。ここでは、操作者の搭乗している車両が、高速道路のような高架の道路を走行しているにもかかわらず、前記画面において表示されている現在地が前記高架の道路の下を通っている地上の道路上であるように表示されている場合について説明する。
【0054】
この場合、操作者は、マイクロホン等によって構成される音声入力部36を使用して、「上の道」という音声を入力する。すると、音声認識手段27は、音声認識処理を実行して、「上の道」という音声が、現在地を上方に位置する高架の道路に移動させるという現在地修正指示であると認識する。そして、前記音声認識手段27は、現在地を上方に位置する高架の道路に移動させるという現在地修正指示を現在地修正手段28に送信する。
【0055】
次に、該現在地修正手段28は、前記現在地修正指示を受信すると、現在地決定手段29がマップマッチング処理を実行して選択したマッチング候補の中から、現在地修正指示に適合するマッチング候補、すなわち、現在地として決定された道路よりも上方に位置する高度の高いマッチング候補を探し出す。
【0056】
ここで、道路データに標高データの高度データが含まれる場合には、現在地の標高と複数のマッチング候補の標高とを比較し、現在地よりも標高の高いマッチング候補を探し出す。また、上下の相対的な位置関係が把握できる識別情報(例えば、地上の道路は0、高架道路は1)が格納されている場合には、マッチング候補の道路の識別情報(具体例では1)から現在地よりも上方に位置するマッチング候補を探し出す。
【0057】
そして、現在地が位置する道路を前記高度の高いマッチング候補に変更する、すなわち、現在地を修正する。なお、高度の高いマッチング候補が複数ある場合には、その中から前記現在地として決定された道路に最も近接しているマッチング候補を選択する。あるいは、ペナルティの最も低いものを選択してもよいし、現在地に最も近接しているものを選択してもよい。
【0058】
続いて、経路探索を行う必要があれば、修正された現在地に基づいて、再度経路探索を行う。
【0059】
なお、現在地として決定された道路よりも上方に位置する高度の高いマッチング候補を探し出すことができない場合は、操作者にその旨を告知する。この場合、音声出力部37は、音声合成装置によって合成された「上の道はありません」という音声を図示されないスピーカから出力し、操作者に知らせる。なお、前記告知は、表示部35の画面に表示されるようにしてもよい。
【0060】
また、操作者の搭乗している車両が、一般道を走行しているにもかかわらず、前記画面において表示されている現在地が前記一般道に近接する有料道路上であるように表示されている場合、操作者は、マイクロホン等によって構成される音声入力部36を使用して、「一般道」という音声を入力する。すると、音声認識手段27は、音声認識処理を実行して、「一般道」という音声が、現在地を一般道に移動させるという現在地修正指示であると認識する。そして、前記音声認識手段27は、現在地を一般道に移動させるという現在地修正指示を現在地修正手段28に送信する。
【0061】
次に、該現在地修正手段28は、前記現在地修正指示を受信すると、現在地決定手段29がマップマッチング処理を実行して選択したマッチング候補の中から、現在地修正指示に適合するマッチング候補、すなわち、道路種別が一般道であるマッチング候補を探し出す。
【0062】
そして、現在地が位置する道路を前記道路種別が一般道であるマッチング候補に変更する、すなわち、現在地を修正する。なお、道路種別が一般道であるマッチング候補が複数ある場合には、その中から前記現在地として決定された道路に最も近接しているマッチング候補を選択する。あるいは、ペナルティの最も低いものを選択してもよいし、現在地に最も近接しているものを選択してもよい。
【0063】
続いて、経路探索を行う必要があれば、修正された現在地に基づいて、再度経路探索を行う。
【0064】
なお、道路種別が一般道であるマッチング候補を探し出すことができない場合は、操作者にその旨を告知する。この場合、音声出力部37は、音声合成装置によって合成された「一般道はありません」という音声を図示されないスピーカから出力し、操作者に知らせる。なお、前記告知は、表示部35の画面に表示されるようにしてもよい。
【0065】
また、操作者の搭乗している車両が走行している道路よりも、車両の進行方向に対して左側にある道路を走行しているように、前記画面において表示されている場合、操作者は、マイクロホン等によって構成される音声入力部36を使用して、「右の道」という音声を入力する。すると、音声認識手段27は、音声認識処理を実行して、「右の道」という音声が、現在地を車両の進行方向に対して右側にある道路に移動させるという現在地修正指示であると認識する。そして、前記音声認識手段27は、現在地を車両の進行方向に対して右側にある道路に移動させるという現在地修正指示を現在地修正手段28に送信する。
【0066】
次に、該現在地修正手段28は、前記現在地修正指示を受信すると、現在地決定手段29がマップマッチング処理を実行して選択したマッチング候補の中から、現在地修正指示に適合するマッチング候補、すなわち、車両の進行方向に対して右側にあるマッチング候補を探し出す。
【0067】
そして、現在地が位置する道路を前記車両の進行方向に対して右側にあるマッチング候補に変更する、すなわち、現在地を修正する。なお、車両の進行方向に対して右側にあるマッチング候補が複数ある場合には、その中から前記現在地として決定された道路に最も近接しているマッチング候補を選択する。あるいは、ヘナルティの最も低いものを選択してもよいし、現在地に最も近接しているものを選択してもよい。
【0068】
続いて、経路探索を行う必要があれば、修正された現在地に基づいて、再度経路探索を行う。
【0069】
なお、現在地として決定された道路よりも車両の進行方向に対して右側に位置するマッチング候補を探し出すことができない場合は、操作者にその旨を告知する。この場合、音声出力部37は、音声合成装置によって合成された「右側に道路はありません」という音声を図示されないスピーカから出力し、操作者に知らせる。なお、前記告知は、表示部35の画面に表示されるようにしてもよい。
【0070】
また、操作者の搭乗している車両が走行している道路がこのようにして修正された現在地よりも更に右側にある場合、すなわち、現在地の修正が不十分である場合には、操作者は、再度、「右の道」という音声を入力する。すると、前述された現在地処理が再度実行されて、現在地が修正される。
【0071】
このように、本実施の形態においては、表示部35の画面に表示された車両の現在地の誤りに気が付いた場合、操作者が音声によって現在地の修正を指示すると、音声認識手段27が現在地修正指示を認識し、現在地修正手段28が前記現在地修正指示に従ってマッチング候補を選択して、現在地を修正するようになっている。
【0072】
なお、現在地に対する修正すべき位置の方位は、「上」及び「右」に限ることなく「下」、「左」、「前」、「後ろ」等、いかなる方向であってもよい。
【0073】
したがって、操作者は、ナビゲーション装置14の入力部34を操作する必要がないので、車両の走行中であっても、現在地の修正を容易に行うことができる。そのため、操作者が表示部35の画面に表示された車両の現在地の誤りに気が付いた場合、長時間にわたり現在地が誤った状態が継続してしまうことがなく、即時に現在地を修正することができる。また、車両を停止させる必要もないので、操作者が煩わしく感じることもない。
【0074】
次に、本実施の形態におけるフローチャートについて説明する。まず、第1のフローチャートについて説明する。
ステップS1 操作者は「上の道」という音声を入力する。
ステップS2 音声認識手段27は、現在地を上方に位置する道路に移動させるという現在地修正指示であると認識する。
ステップS3 現在地修正手段28は高度の高いマッチング候補を探し出す。
ステップS4 現在地修正手段28は高度の高いマッチング候補があるか否かを判断する。ある場合はステップS5に進み、ない場合はステップS9に進む。
ステップS5 現在地修正手段28は高度の高いマッチング候補が複数か否かを判断する。複数の場合はステップS6に進み、複数でない場合はステップS7に進む。
ステップS6 現在地から一番近いマッチング候補を選択する。
ステップS7 現在地とするマッチング候補を変更する。
ステップS8 経路探索を行う必要があれば再探索を行う。
ステップS9 「上の道はありません」という音声を出力する。
【0075】
次に、第2のフローチャートについて説明する。
ステップS11 操作者は「一般道」という音声を入力する。
ステップS12 音声認識手段27は、現在地を一般道に移動させるという現在地修正指示であると認識する。
ステップS13 現在地修正手段28は一般道の道路種別を持つマッチング候補を探し出す。
ステップS14 現在地修正手段28は一般道の道路種別を持つマッチング候補があるか否かを判断する。ある場合はステップS15に進み、ない場合はステップS19に進む。
ステップS15 現在地修正手段28は一般道の道路種別を持つマッチング候補が複数か否かを判断する。複数の場合はステップS16に進み、複数でない場合はステップS17に進む。
ステップS16 現在地から一番近いマッチング候補を選択する。
ステップS17 現在地とするマッチング候補を変更する。
ステップS18 経路探索を行う必要があれば再探索を行う。
ステップS19 「一般道はありません」という音声を出力する。
【0076】
次に、第3のフローチャートについて説明する。
ステップS21 操作者は「右の道」という音声を入力する。
ステップS22 音声認識手段27は、現在地を右側にある道路に移動させるという現在地修正指示であると認識する。
ステップS23 現在地修正手段28は右側にあるマッチング候補を探し出す。
ステップS24 現在地修正手段28は進行方向に対して右側にあるマッチング候補があるか否かを判断する。ある場合はステップS25に進み、ない場合はステップS29に進む。
ステップS25 現在地修正手段28は進行方向に対して右側にあるマッチング候補が複数か否かを判断する。複数の場合はステップS26に進み、複数でない場合はステップS27に進む。
ステップS26 現在地から一番近いマッチング候補を選択する。
ステップS27 現在地とするマッチング候補を変更する。
ステップS28 経路探索を行う必要があれば再探索を行う。
ステップS29 「右側に道路はありません」という音声を出力する。
【0077】
次に、本発明の第2の実施の形態について説明する。なお、前記第1の実施の形態と同じ構造を有するもの及び同じ動作についてはその説明を省略する。
【0078】
図6は本発明の第2の実施の形態における現在地修正処理の概念図、図7は本発明の第2の実施の形態における現在地修正処理の例を示すフローチャートである。
【0079】
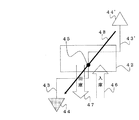
本実施の形態においては、立体駐車場等におけるターンテーブルによって車両の向きを変換する場合について説明する。
【0080】
まず、操作者は、ターンテーブル45を備えるパーキングタワーのような立体駐車場42に車両を駐車させる。この場合、矢印46の方向に車両を走行させ、ターンテーブル45上を通過して、立体駐車場内の駐車ケージに乗り込む。そして、車両のエンジンを停止するので、それとともにナビゲーション装置14の電源もオフになる、すなわち、停止する。
【0081】
次に、操作者は、車両を前記立体駐車場42から出して走行を再開する。この場合、車両のエンジンを起動するので、それとともにナビゲーション装置14の電源もオンになる、すなわち、起動する。続いて、前記駐車ケージから車両を出して、ターンテーブル45上で停止する。すると前記ターンテーブル45が180度回転して、車両の向きが180度変換される。そして、矢印47の方向に車両を走行させターンテーブル45から離れた後、矢印43のように道路上を走行するとする。
【0082】
この場合、データ記録部16等の記憶手段には、ナビゲーション装置14が停止するまで車両がどのような道路を通ってきたかということが格納されている、すなわち、車両の軌跡の履歴が格納されている。また、ナビゲーション装置14が起動すると、その時の位置情報も前記軌跡の履歴に追加され、起動後の軌跡の履歴もナビゲーション装置14が起動した時の前記位置情報を起点として追加される。そして、現在地決定手段29は前記軌跡の履歴に基づいて、現在地を決定する。そのため、現在地決定手段29は、ナビゲーション装置14が停止するまでの車両の軌跡に基づいて、すなわち、車両の向きが180度変換される以前の状態が継続しているとして、現在地を決定してしまう。
【0083】
その結果、車両は、ターンテーブル45から離れた後矢印43のように道路上を走行して現在地44に位置するにもかかわらず、現在地決定手段29は、車両が矢印43’のように道路上を走行して現在地44’に位置すると誤って判断してしまう。この場合、現在地44と現在地44’とは、ターンテーブル45を中心として点対称の位置にある。なお、ターンテーブル45の位置とナビゲーション装置14が起動した位置とはほぼ一致しているので、現在地44と現在地44’とは、ナビゲーション装置14が起動した位置を中心として点対称の位置にある。
【0084】
この場合、操作者は、表示部35の画面に表示されている現在地44’が誤りであることに気がつくと、音声入力部36を使用して、「ターンテーブル」という音声を入力する。すると、音声認識手段27は、音声認識処理を実行して、「ターンテーブル」という音声が、現在地44’をナビゲーション装置14が起動した位置を中心として点対称の位置にある現在地44に移動させるという現在地修正指示であると認識する。すなわち、現在地をナビゲーション装置14が起動した位置を中心に点対称の位置になるように反転させて、矢印48のように移動させるという現在地修正指示であると認識する。そして、前記音声認識手段27は、現在地をナビゲーション装置14が起動した位置を中心に反転させるという現在地修正指示を現在地修正手段28に送信する。
【0085】
次に、該現在地修正手段28は、前記現在地修正指示を受信すると、前記現在地決定手段29に対し、現在地をナビゲーション装置14が起動した位置を中心に反転させてからマップマッチング処理を実行するように指示する。すると、前記現在地決定手段29は、前記指示に対応するマッチング候補を探し出す。
【0086】
そして、前記現在地修正手段28は、ナビゲーション装置14が起動した位置を中心に反転した位置のマッチング候補に変更する、すなわち、現在地を修正する。
【0087】
続いて、経路探索を行う必要があれば、修正された現在地に基づいて、再度経路探索を行う。
【0088】
なお、記憶手段に格納されている車両の軌跡の履歴に、ナビゲーション装置14が起動した時の位置情報が含まれていない場合は、現在地をナビゲーション装置14が起動した位置を中心に反転させることができないので、操作者にその旨を告知する。この場合、音声出力部37は、音声合成装置によって合成された「ターンテーブルはありません」という音声を図示されないスピーカから出力し、操作者に知らせる。なお、前記告知は、表示部35の画面に表示されるようにしてもよい。
【0089】
ここで、現在地をナビゲーション装置14が起動した位置以外の点を中心に反転させるようにすることもできる。例えば、車両の方向の修正が必要な位置情報を地図データに記憶する場合には、現在地から所定範囲内にその位置情報があるか否かを判断し、ある場合には、その位置を中心に点対称で反転させる。
【0090】
なお、車両の方向の修正が必要な場所としてターンテーブルがあるが、このターンテーブルの位置情報を駐車場の位置情報と別に記憶してもよいし、駐車場といっしょに記憶してもよい(すなわち駐車場情報として、位置座標、およびその駐車場が車両の方向の修正が必要な場所であるか否かを示す情報を記憶する)。
【0091】
なお、本実施の形態において、現在地修正手段28は、反転する基準位置(ナビゲーション装置14が起動した位置、ターンテーブルの位置、駐車場の位置)に対する点対称の位置を求め、該位置に最も近いマッチング候補に現在地を修正してもよいし、前記反転する基準位置に対し点対称の位置に現在地を修正するようにしてもよい。
【0092】
このように、本実施の形態においては、車両の向きがターンテーブル45によって180度変換された時であっても、操作者が音声によって現在地の修正を指示すると、音声認識手段27が現在地修正指示を認識し、現在地修正手段28が前記現在地修正指示に従ってマッチング候補を選択して、現在地を修正するようになっている。
【0093】
したがって、操作者は、立体駐車場42を利用して車両の向きがターンテーブル45によって180度変換された時であっても、現在地の修正を容易に行うことができる。
【0094】
また、車両の向きを修正する指示として「ターンテーブル」以外の音声を入力するようにしてもい。例えば、「反対」という音声を入力すると、現在地の進行方向を180度変換した方向に修正したり、現在地が存在する道路の方向であって現在地の進行方向と逆の方向に修正したりするようにしてもよい。
【0095】
次に、本実施の形態におけるフローチャートについて説明する。
ステップS31 操作者は「ターンテーブル」という音声を入力する。
ステップS32 音声認識手段27は、現在地をナビゲーション装置14が起動した位置を中心に反転させるという現在地修正指示であると認識する。
ステップS33 車両の軌跡の履歴に、ナビゲーション装置14が起動した時の位置情報が含まれているか否かを判断する。含まれている場合はステップS34に進み、含まれていない場合はステップS36に進む。
ステップS34 現在地をナビゲーション装置14が起動した位置を中心に反転させる。
ステップS35 経路探索を行う必要があれば再探索を行う。
ステップS36 「ターンテーブルはありません」という音声を出力する。
【0096】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【0097】
例えば、本発明は、複数のマッチング候補の中から現在地を決定するナビゲーションのためにコンピュータを、音声による現在地修正指示を認識する音声認識手段、及び、前記現在地修正指示に従って、現在地を修正する現在地修正手段として機能させるナビゲーションプログラムを含むものである。
【0098】
さらに、本発明は、複数のマッチング候補の中から現在地を決定するナビゲーションのためにコンピュータを、音声による現在地修正指示を認識する音声認識手段、及び、前記現在地修正指示に従って、現在地を修正する現在地修正手段として機能させるナビゲーションプログラムを記録したコンピュータ読み取り可能な記録媒体を含むものである。
【0099】
【発明の効果】
本発明によれば、ナビゲーション装置に表示された車両の現在地の誤りに気が付いた場合、操作者が音声によって現在地の修正を指示すると、音声による指示を認識し、該指示に従って現在地を修正することによって、現在地の修正を容易に行うことができる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態における現在地修正処理の例を示す第1のフローチャートである。
【図2】本発明の第1の実施の形態におけるナビゲーション装置の概念図である。
【図3】本発明の第1の実施の形態におけるナビゲーション装置の機能を示す図である。
【図4】本発明の第1の実施の形態における現在地修正処理の例を示す第2のフローチャートである。
【図5】 本発明の第1の実施の形態における現在地修正処理の例を示す第3のフローチャートである。
【図6】 本発明の第2の実施の形態における現在地修正処理の概念図である。
【図7】本発明の第2の実施の形態における現在地修正処理の例を示すフローチャートである。
【符号の説明】
14 ナビゲーション装置
27 音声認識手段
28 現在地修正手段
44、44’ 現在地
Claims (3)
- (a)複数のマッチング候補の中から現在地を決定するナビゲーション装置において、
(b)音声による現在地修正指示を認識する音声認識手段と、
(c)前記現在地修正指示に従って、現在地を修正する現在地修正手段とを有し、
(d)前記現在地修正指示は現在地に対する修正すべき位置の方向であることを特徴とするナビゲーション装置。 - 前記現在地修正手段は、前記現在地修正指示に適合するマッチング候補を修正後の現在地とする請求項1に記載のナビゲーション装置。
- (a)複数のマッチング候補の中から現在地を決定するナビゲーションのためにコンピュータを、
(b)音声による現在地修正指示を認識する音声認識手段、及び、
(c)前記現在地修正指示に従って、現在地を修正する現在地修正手段として機能させるナビゲーションプログラムであって、
(d)前記現在地修正指示は現在地に対する修正すべき位置の方向であるナビゲーションプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001154500A JP4635376B2 (ja) | 2001-05-23 | 2001-05-23 | ナビゲーション装置及びナビゲーションプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001154500A JP4635376B2 (ja) | 2001-05-23 | 2001-05-23 | ナビゲーション装置及びナビゲーションプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002350158A JP2002350158A (ja) | 2002-12-04 |
| JP4635376B2 true JP4635376B2 (ja) | 2011-02-23 |
Family
ID=18998831
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001154500A Expired - Fee Related JP4635376B2 (ja) | 2001-05-23 | 2001-05-23 | ナビゲーション装置及びナビゲーションプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4635376B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4271456B2 (ja) * | 2003-02-05 | 2009-06-03 | アルパイン株式会社 | 車載用ナビゲーション装置 |
| JP2006170769A (ja) | 2004-12-15 | 2006-06-29 | Aisin Aw Co Ltd | 案内情報提供方法、案内情報提供システム、ナビゲーション装置及び入出力装置 |
| JP5162178B2 (ja) * | 2007-07-31 | 2013-03-13 | 三洋電機株式会社 | ナビゲーション装置 |
| JP5099450B2 (ja) * | 2008-10-31 | 2012-12-19 | アイシン・エィ・ダブリュ株式会社 | 車載ナビゲーション装置及び車両方位変更箇所判定プログラム |
| JP2010190721A (ja) * | 2009-02-18 | 2010-09-02 | Aisin Aw Co Ltd | 車載ナビゲーション装置及び車両方位変更箇所判定プログラム |
| US9045098B2 (en) * | 2009-12-01 | 2015-06-02 | Honda Motor Co., Ltd. | Vocabulary dictionary recompile for in-vehicle audio system |
| JP2021162399A (ja) * | 2020-03-31 | 2021-10-11 | パイオニア株式会社 | 表示制御装置、表示制御方法及び表示制御プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2701492B2 (ja) * | 1989-12-05 | 1998-01-21 | ソニー株式会社 | 地図表示装置 |
| JPH0696390A (ja) * | 1992-09-14 | 1994-04-08 | Hitachi Ltd | 自動車のナビゲーションシステムの表示方法 |
| JPH10197263A (ja) * | 1997-01-10 | 1998-07-31 | Sumitomo Electric Ind Ltd | ナビゲーション表示装置 |
| JP4060974B2 (ja) * | 1999-02-25 | 2008-03-12 | 株式会社ザナヴィ・インフォマティクス | 経路誘導装置 |
-
2001
- 2001-05-23 JP JP2001154500A patent/JP4635376B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002350158A (ja) | 2002-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0751376B1 (en) | Vehicular navigation apparatus | |
| EP2453207B1 (en) | Travel guidance device, travel guidance method, and computer program | |
| JP3582560B2 (ja) | 車両用ナビゲーション装置及び記録媒体 | |
| JP3801433B2 (ja) | ナビゲーション装置およびその記憶媒体 | |
| JP3814992B2 (ja) | 車両用ナビゲーション装置 | |
| JP2007178126A (ja) | 走行リンク特定システム | |
| JP3969373B2 (ja) | ナビゲーション装置 | |
| JP3791196B2 (ja) | 車両用ナビゲーション装置 | |
| JP4635376B2 (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| JP4305181B2 (ja) | ナビゲーション装置 | |
| JP3747815B2 (ja) | 車両用ナビゲーション装置及びその記憶媒体 | |
| JP3716898B2 (ja) | 車両用ナビゲーション装置及び記憶媒体 | |
| JP4576730B2 (ja) | ナビゲーション装置 | |
| JP3395929B2 (ja) | ナビゲーション装置 | |
| JP4639880B2 (ja) | ナビゲーション装置 | |
| JPH10122890A (ja) | 車両用ナビゲーション装置 | |
| JPH08304101A (ja) | ナビゲーション装置 | |
| JP3978309B2 (ja) | ナビゲーション装置、番地表示方法及びそのプログラムを記録した記録媒体 | |
| JP4261967B2 (ja) | 車両用ナビゲーション装置並びに該装置用プログラム及び記録媒体 | |
| JP4561355B2 (ja) | ナビゲーション装置 | |
| JP4661408B2 (ja) | ナビゲーション装置 | |
| JP3393443B2 (ja) | 車両用ナビゲーション装置及び記憶媒体 | |
| JP4111127B2 (ja) | 経路案内システム及び経路案内方法のプログラム | |
| JPH09189560A (ja) | 車両用ナビゲーション装置及びその記録媒体 | |
| JP3857531B2 (ja) | ナビゲーション装置、自車方位決定方法及びそのプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100325 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101026 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141203 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |