以下に、本発明の実施形態を詳細に説明する。まず、本実施形態で適用するインクジェット記録装置の本体構成を説明する。
(機構部の構成)
本実施形態における記録装置本体は、各機構の役割から、給紙部、用紙搬送部、排紙部、キャリッジ部、クリーニング部および外装部に分類することができる。以下、これらを項目別に概略を説明していく。
(A)給紙部
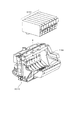
図16および図17は、本実施形態で適用する記録装置の斜視図であり、図16は記録装置の非使用状態、図17は記録装置M1の使用状態をそれぞれ示している。また、図18、図19および図20は、記録装置本体の内部機構を説明するための図であり、図18は右上部からの斜視図、図19は左上部からの斜視図および図20は記録装置本体の側断面図をそれぞれ示したものである。
図16〜図20を参照するに、給紙部は記録媒体を積載する圧板M2010、記録媒体を1枚ずつ給紙する給紙ローラM2080、記録媒体を分離する分離ローラM2041、記録媒体を積載位置に戻す為の戻しレバーM2020、等がベースM2000に取り付けられる構成となっている。
ベースM2000または外装には、積載された記録媒体を保持する為の給紙トレイM2060が取り付けられている。給紙トレイM2060は多段式で使用時は回転させて用いるものである。
給紙ローラM2080は、断面円弧の棒状をしている。用紙基準よりに1つの分離ローラゴムが設けられており、これによって記録媒体を給紙する。給紙ローラM2080の駆動力は、給紙部に設けられた専用ASFモータE0105から不図示の駆動伝達ギア、遊星ギアによって伝達される。
圧板M2010には可動サイドガイドM2030が移動可能に設けられて、記録媒体の積載位置を規制している。圧板M2010はベースM2000に結合された回転軸を中心に回転可能で、圧板ばねM2012により給紙ローラM2080に付勢される。給紙ローラM2080と対向する圧板M2010の部位には、枚数が残り少なくなった状態での記録媒体の重送を防止するために、人工皮等の摩擦係数の大きい材質からなる分離シートM2013が設けられている。圧板M2010は、圧板カムによって、給紙ローラM2080に、当接、離間できるように構成されている。
ベースM2000には、記録媒体を一枚ずつ分離するための分離ローラM2041を取り付けた分離ローラホルダM2040が、ベースM2000に設けられた回転軸を中心に回転可能に設置され、不図示の分離ローラバネにより給紙ローラM2080に付勢されている。分離ローラM2041には、不図示のクラッチが取り付けられており、所定以上の負荷がかかると、分離ローラM2041が取り付けられた部分が、回転する構成になっている。分離ローラM2041は、分離ローラリリースシャフトM2044と不図示のコントロールカムによって、給紙ローラM2080に、当接、離間できるように構成されている。これら圧板M2010、戻しレバーM2020、および分離ローラM2041の位置は、オートシートフィードセンサ(以下ASFセンサと言う)E0009によって検知されている。
記録媒体を積載位置に戻す為の戻しレバーM2020は、回転可能にベースM2000に取り付けられており、解除方向に不図示の戻しレバーバネで付勢されている。記録媒体を戻す時は、コントロールカムによって回転するように構成されている。
以上の構成を用いて給紙する状態を以下に説明する。
通常の待機状態において、圧板M2010は圧板カムでリリースされ、分離ローラM2041はコントロールカムでリリースされている。また、戻しレバーM2020は記録媒体を戻し、積載状態の記録媒体が奥に入らないように、積載口を塞ぐような積載位置に設けられている。
給紙を行う際には、まずモータ駆動によって、分離ローラM2041が給紙ローラM2080に当接する。そして、戻しレバーM2020がリリースされて、圧板M2010が給紙ローラM2080に当接する。この状態で、記録媒体の給紙が開始される。記録媒体は、ベースM2000に設けられた不図示の前段分離部で制限され、記録媒体の所定枚数のみが給紙ローラM2080と分離ローラM2041から構成されるニップ部に送られる。送られた記録媒体はニップ部で分離され、最上位の記録媒体のみが搬送される。
記録媒体が、搬送ローラM3060およびピンチローラM3070まで到達すると、圧板M2010は不図示の圧板カムによって、分離ローラM2041はコントロールカムによって、リリースされる。戻しレバーM2020は、コントロールカムによって積載位置に戻る。これにより、給紙ローラM2080と分離ローラM2041とから構成されるニップ部に到達していた記録媒体は積載位置まで戻される。
(B)用紙搬送部
曲げ起こした板金からなるシャーシM1010には、記録媒体を搬送する搬送ローラM3060とペーパエンドセンサ(以下PEセンサと称す)E0007が回動可能に取り付けられている。搬送ローラM3060は、金属軸の表面にセラミックの微小粒がコーティングされた構成となっており、両軸の金属部分を不図示の軸受けが受ける状態で、シャーシM1010に取り付けられている。軸受けと搬送ローラM3060との間には、不図示のローラテンションバネが設けられており、搬送ローラM3060を付勢することにより、回転時に適量の負荷を与えて安定した搬送が行えるようになっている。
搬送ローラM3060には、従動する複数のピンチローラM3070が当接して設けられている。ピンチローラM3070は、ピンチローラホルダM3000に保持されているが、不図示のピンチローラバネによって付勢されることで、搬送ローラM3060に圧接し、ここで記録媒体の搬送力を生み出している。この時、ピンチローラホルダM3000の回転軸は、シャーシM1010の軸受けに取り付けられ、この位置を中心に回転する。
記録媒体が搬送されてくる入口には、記録媒体をガイドするためのペーパガイドフラッパM3030およびプラテンM3040が配設されている。また、ピンチローラホルダM3000には、PEセンサレバーM3021が設けられており、PEセンサレバーM3021は、記録媒体の先端および後端の検出をPEセンサ−E0007に伝える役割を果たす。プラテンM3040は、シャーシM1010に取り付けられ、位置決めされている。ペーパガイドフラッパM3030は、不図示の軸受け部を中心に回転可能で、シャーシM1010に当接することで位置決めされる。また、軸受け部は、搬送ローラM3060と嵌合して摺動する。
搬送ローラM3060の記録媒体搬送方向における下流側には、不図示の記録ヘッドH1001が設けられている。
上記構成における搬送の過程を説明する。用紙搬送部に送られた記録媒体は、ピンチローラホルダM3000及びペーパガイドフラッパM3030に案内されて、搬送ローラM3060とピンチローラM3070とのローラ対に送られる。この時、PEセンサレバーM3021が、記録媒体の先端を検知して、これにより記録媒体に対する記録位置が求められている。搬送ローラM3060とピンチローラM3070とからなるローラ対は、LFモータE0002の駆動により回転され、この回転により記録媒体がプラテンM3040上を搬送される。プラテンM3040には、搬送基準面となるリブが形成されており、このリブにより、記録ヘッドH1001と記録媒体表面との間のギャップが管理されている。また同時に、当該リブが、後述する排紙部と合わせて、記録媒体の波打ちを抑制する役割も果たしている。またプラテンM3040上には不図示のスポンジ部が設けられており、記録媒体の先端部、後端部の記録時には前記スポンジ部に対応する位置のノズルを使用して画像の形成を行う。
搬送ローラM3060が回転するための駆動力は、例えばDCモータからなるLFモータE0002の回転力が、不図示のタイミングベルトを介して、搬送ローラM3060の軸上に配設されたプーリM3061に伝達されることによって得られている。また、搬送ローラM3060の軸上には、搬送ローラM3060による搬送量を検出する為のコードホイールM3062が設けられており、隣接するシャーシM1010には、コードホイールM3062に形成されたマーキングを読み取るためのエンコードセンサM3090が配設されている。尚、コードホイールM3062に形成されたマーキングは、150〜300lpi(ライン/インチ)のピッチで形成されているものとする。
(C)排紙部
排紙部は、第1の排紙ローラM3100および第2の排紙ローラM3110、複数の拍車M3120およびギア列などから構成されている。
第1の排紙ローラM3100は、金属軸に複数のゴム部を設けて構成されている。第1の排紙ローラM3100の駆動は、搬送ローラM3060の駆動が、アイドラギアを介して第1の排紙ローラM3100まで伝達されることによって行われている。
第2の排紙ローラM3110は、樹脂の軸にエラストマの弾性体M3111を複数取り付けた構成になっている。第2の排紙ローラM3110の駆動は、第1の排紙ローラM3100の駆動が、アイドラギアを介して伝達することが行われる。
拍車M3120は、周囲に凸形状を複数設けた例えばSUSでなる円形の薄板を樹脂部と一体としたもので、拍車ホルダに複数取り付けられている。この取り付けは、コイルバネを棒状に設けた拍車バネによって行われているが、同時に拍車バネのばね力は、拍車M3120を排紙ローラM3100およびM3110に対し所定圧で当接させている。この構成によって拍車M3120は、2つの排紙ローラM3100およびM3110に従動して回転可能となっている。拍車M3120のいくつかは、第1の排紙ローラM3100のゴム部、あるいは第2の排紙ローラM3110の弾性体M3111の位置に設けられており、主に記録媒体の搬送力を生み出す役割を果たしている。また、その他のいくつかは、ゴム部あるいは弾性体部M3111が無い位置に設けられ、主に記録時の記録媒体の浮き上がりを抑える役割を果たしている。
また、ギア列は、搬送ローラM3060の駆動を排紙ローラM3100およびM3110に伝達する役割を果たしている。
第1の排紙ローラM3100と第2の排紙ローラM3110の間には、不図示の紙端サポートが設けられている。紙端サポートは、記録媒体の両端を持ち上げて、第1の排紙ローラM3100の先で記録媒体を保持することにより、記録媒体に成された記録を、キャリッジの擦過などから守る役割を果たしている。具体的には、先端に不図示のコロが設けられた樹脂部材が、不図示の紙端サポートバネによって付勢されて、所定の圧力でコロを記録媒体に押し付けることで、記録媒体の両端が持ち上げられ、こしを作り、所定の位置に保持できるように構成されている。
以上の構成によって、画像形成された記録媒体は、第1の排紙ローラM3110と拍車M3120とのニップに挟まれ、搬送されて排紙トレイM3160に排出される。排紙トレイM3160は、複数に分割され、後述する下ケースM7080の下部に収納できる構成になっている。使用時は、引出して使用する。また、排紙トレイM3160は、先端に向けて高さが上がり、更にその両端は高い位置に保持されるよう設計されており、排出された記録媒体の積載性を向上し、記録面の擦れなどを防止している。
(D)キャリッジ部
キャリッジ部は、記録ヘッドH1001を取り付けるためのキャリッジM4000を有しており、キャリッジM4000は、ガイドシャフトM4020およびガイドレールM1011によって支持されている。ガイドシャフトM4020は、シャーシM1010に取り付けられており、記録媒体の搬送方向に対して直角方向にキャリッジM4000を往復走査させるように案内支持している。ガイドレールM1011は、シャーシM1010に一体に形成されており、キャリッジM4000の後端を保持して記録ヘッドH1001と記録媒体との隙間を維持する役割を果たしている。また、ガイドレールM1011のキャリッジM4000との摺動側には、ステンレス等の薄板からなる摺動シートM4030が張設され、記録装置の摺動音の低減化を図っている。
キャリッジM4000は、シャーシM1010に取り付けられたキャリッジモータE0001によりタイミングベルトM4041を介して駆動される。また、タイミングベルトM4041は、アイドルプーリM4042によって張設、支持されている。更に、タイミングベルトM4041は、キャリッジM4000とゴム等からなるキャリッジダンパーを介して結合されており、キャリッジモータE0001等の振動を減衰することで、記録される画像のむら等を低減している。
キャリッジM4000の位置を検出する為のエンコーダスケールE0005が、タイミングベルトM4041と平行に設けられている。エンコーダスケールE0005上には、150〜300lpiのピッチでマーキングが形成されており、当該マーキングを読み取るためのエンコーダセンサE0004(図21について後述)が、キャリッジM4000に搭載されたキャリッジ基板E0013(図21について後述)に設けられている。キャリッジ基板E0013には、記録ヘッドH1001と電気的な接続を行う為のヘッドコネクタE0101も設けられている。また、キャリッジM4000には、電気基板E0014から記録ヘッドH1001へ、駆動信号を伝えるための不図示のフレキシブルケーブルE0012(図21について後述)が接続されている。
記録ヘッドH1001をキャリッジM4000に固定する為の構成として、記録ヘッドH1001をキャリッジM4000に押し付けながら位置決めする為の不図示の突き当て部と、所定の位置に固定する為の不図示の押圧手段が、キャリッジM4000上に設けられている。押圧手段は、ヘッドセットレバーM4010に搭載され、記録ヘッドH1001をセットする際に、ヘッドセットレバーM4010を回転支点中心に回して、記録ヘッドH1001に作用する構成になっている。
さらに、キャリッジM4000には、CD−R等の特殊メディアへ記録を行う際や、記録結果や用紙端部等の位置検出用として、反射型の光センサからなる位置検出センサM4090が取り付けられている。位置検出センサM4090は、発光素子より発光し、その反射光を受光することで、キャリッジM4000の現在位置を検出することができる。
上記構成において記録媒体に画像形成する場合、行位置に対しては、搬送ローラM3060およびピンチローラM3070からなるローラ対が、記録媒体を搬送して位置決めする。また、列位置に対しては、キャリッジモータE0001によりキャリッジM4000を上記搬送方向と垂直な方向に移動させて、記録ヘッドH1001を目的の画像形成位置に配置させる。位置決めされた記録ヘッドH1001は、電気基板E0014からの信号に従って、記録媒体に対しインクを吐出する。記録ヘッドH1001についての詳細な構成および記録システムは後述するが、本実施形態の記録装置においては、記録ヘッドH1001により記録を行いながらキャリッジM4000が列方向に走査する記録主走査と、搬送ローラM3060により記録媒体が行方向に搬送される副走査とを交互に繰り返すことにより、記録媒体上に画像を形成していく構成となっている。
(E)クリ−ニング部
クリーニング部は、記録ヘッドH1001のクリーニングを行うためのポンプM5000、記録ヘッドH1001の乾燥を抑えるためのキャップM5010、記録ヘッドH1001の吐出口形成面をクリーニングするためのブレードM5020、などから構成されている。
クリーニング部には、専用のクリーニングモータE0003が配されている。クリーニングモータE0003には、不図示のワンウェイクラッチが設けられており、一方向の回転でポンプが作動し、もう一方向の回転ではブレードM5020が動作すると同時にキャップM5010の昇降動作が作用するようになっている。
ポンプM5000では、不図示のポンプコロが2本の不図示のチューブをしごくことによって負圧が発生させるように構成されている。またキャップM5010は、不図示の弁などを介してポンプM5000に接続されている。キャップM5010を記録ヘッドH1001のインク吐出口に密着させた状態で、ポンプM5000を作用させると、記録ヘッドH1001から不要なインク等が吸引されるようになっている。更にキャップM5010の内側部分には、吸引後のヘッドH1001のフェイス面に残るインクを削減する為に、キャップ吸収体M5011が設けられている。また、キャップM5010を開けた状態で、キャップM5010に残っているインクを吸引することにより、残インクによる固着およびその後の弊害が起こらないように配慮されている。なお、ポンプM5000で吸引されたインクは廃インクとなり、下ケースM7080に設けられた廃インク吸収体に吸収され、ここに保持される。
ブレードM5020の動作、キャップM5010の昇降、および弁の開閉など、連続して行われる一連の動作は、軸上に複数のカムを設けた不図示のメインカムによって制御される。それぞれの部位のカムやアームがメインカムに作用され、所定の動作を行うことが可能となっている。メインカムの位置は、フォトインタラプタ等の位置検出センサで検出することができる。キャップM5010の降時には、ブレードM5020がキャリッジM4000の走査方向に垂直に移動し、記録ヘッドH1001のフェイス面をクリーニングする構成となっている。ブレードM5020は、記録ヘッドH1001のノズル近傍をクリーニングするものと、フェイス面全体をクリーニングするものと、複数設けられている。そして、キャリッジM4000が、一番奥に移動した際には、ブレードクリーナーM5060に当接することにより、ブレードM5020自身へ付着したインクなども除去することができる構成になっている。
(F)外装部
(A)〜(E)で説明した各ユニットは、主にシャーシM1010に組み込まれ、記録装置の機構部分を形成している。外装は、その回りを覆うように取り付けられている。外装部は主に、下ケースM7080、上ケースM7040、アクセスカバーM7030、コネクタカバーおよびフロントカバーM7010から構成されている。
下ケースM7080の下部には、不図示の排紙トレイレールが設けられており、分割された排紙トレイM3160が収納可能に構成されている。また、フロントカバーM7010は、非使用時に排紙口を塞ぐ構成になっている。
上ケースM7040には、アクセスカバーM7030が取り付けられており、回動可能に構成されている。上ケースの上面の一部は開口部を有しており、この位置で、インクタンクH1900および記録ヘッドH1001が交換可能な様に構成されている。なお、本実施形態の記録装置においては、1色のインクを吐出可能な記録ヘッドを複数色分一体的に構成した記録ヘッドユニットに対し、インクタンクH1900が色毎に独立に着脱可能なヘッドカートリッジ構成となっている。更に、上ケースには、アクセスカバーの開閉を検知する為の不図示のドアスイッチレバー、LEDの光を伝達・表示するLEDガイドM7060、基板のスイッチ(SW)に作用するキースイッチM7070等が設けられている。また、多段式の給紙トレイM2060が回動可能に取り付けられており、給紙部が使われない時は、給紙トレイM2060を収納すれることにより、給紙部のカバーにもなるように構成されている。
上ケースM7040と下ケースM7080は、弾性を持った嵌合爪で取り付けられており、その間のコネクタ部分が設けられている部分を、不図示のコネクタカバーが覆っている。
(電気回路構成)
次に本実施形態における電気的回路の構成を説明する。
図21は、本発明の実施形態における電気的回路の全体構成を概略的に説明するためのブロック図である。
本実施形態で適用する記録装置では、主にキャリッジ基板(CRPCB)E0013、メインPCB(Printed Circuit Board)E0014、電源ユニットE0015、フロントパネルE0106等によって構成されている。
ここで、電源ユニットE0015は、メインPCB E0014と接続され、各種駆動電源を供給するものとなっている。
キャリッジ基板E0013は、キャリッジM4000に搭載されたプリント基板ユニットであり、ヘッドコネクタ E0101を通じて記録ヘッドH1001との信号の授受を行うインタフェイスとして機能する。また、キャリッジM4000の移動に伴ってエンコーダセンサE0004から出力されるパルス信号に基づいて、エンコーダスケールE0005とエンコーダセンサE0004との位置関係の変化を検出し、更にその出力信号をフレキシブルフラットケーブル(CRFFC)E0012を通じてメインPCB E0014へと出力する。キャリッジ基板E0013には、周囲温度を検出するためのサーミスタなどの温度センサや所要の光学センサが設けられている(以下、これらのセンサをOnCRセンサE0102として参照する)。OnCRセンサE0102により得られる情報は、記録ヘッドカートリッジH1000からのヘッド温度情報とともに、フレキシブルフラットケーブル(CRFFC)E0012を通じてメインPCB E0014へと出力される。
メインPCB E0014は、本実施形態におけるインクジェット記録装置の各部の駆動制御を司るプリント基板ユニットであり、その基板上には、紙端検出センサ(PEセンサ)E0007、Automatic Sheet Feeder(ASF)センサE0009、カバーセンサE0022およびホストインタフェース(ホストI/F)E0017を有している。また、キャリッジM4000を主走査させるための駆動源となるキャリッジモータE0001、記録媒体を搬送するための駆動源となるLFモータE0002、記録ヘッドH1001の回復動作の駆動源となるPGモータE0003、記録媒体の給紙動作の駆動源となるASFモータE0105など各種モータと接続されて各機能の駆動を制御している。更に、インクエンプティセンサ、メディア(紙)判別センサ、キャリッジ位置(高さ)センサ、LFエンコーダセンサ、PGセンサのような各種オプションユニットの装着や動作状態を示す様々なセンサ信号E0104を受信するとともに、各種オプションユニットの駆動制御を行うために、オプション制御信号E0108を出力する。また、メインPCB E0014は、CRFFC E0012、電源ユニットE0015およびフロントパネルE0106とそれぞれ接続し、パネル信号E0107によって情報のやり取りを行うための、インタフェイスを有している。
フロントパネルE0106は、ユーザ操作の利便性のために、記録装置本体の正面に設けたユニットであり、リジュームキーE0019、LED E0020、電源キーE0018、さらにデジタルカメラ等の周辺デバイスとの接続に用いるデバイスI/F E0100を有している。
図22は、メインPCB E1004の内部構成を示すブロック図である。
図22において、E1102はASIC(Application Specific Integrated Circuit)であり、制御バスE1014を通じてROM E1004に接続され、ROM E1004に格納されたプログラムに従って、各種制御を行っている。例えば、メインPCB E0014上の各センサ出力や、センサ信号E0104、CRPCB E0013上のOnCRセンサ信号E1105、エンコーダ信号E1020、フロントパネルE0106上の電源キーE0018、リジュームキーE0019からの出力の状態を検出している。また、ホストI/F E0017、フロントパネル上のデバイスI/FE0100の接続およびデータ入力状態に応じて、各種論理演算や条件判断等を行い、各構成要素を制御し、インクジェット記録装置の駆動制御を司っている。
E1103はドライバ・リセット回路であって、モータ電源(VM)E1040を駆動源とし、ASIC E1102からのモータ制御信号E1106に従って、CRモータ駆動信号E1037、LFモータ駆動信号E1035、PGモータ駆動信号E1034、ASFモータ駆動信号E1104を生成し、各モータを駆動する。さらに、ドライバ・リセット回路E1103は、電源回路を有しており、メインPCB E0014、CRPCBE0013、フロントパネルE0106など各部に必要な電源を供給し、さらには電源電圧の低下を検出して、リセット信号E1015を発生および初期化を行う。
E1010は電源制御回路であり、ASIC E1102からの電源制御信号E1024に従って発光素子を有する各センサ等への電源供給を制御する。
ホストI/F E0017は、ASIC E1102からのホストI/F信号E1028を、外部に接続されるホストI/FケーブルE1029に伝達し、また同ケーブルE1029からの信号をASIC E1102に伝達する。
一方、電源ユニットE0015からは、ヘッド電源(VH)E1039、モータ電源(VM)E1040、およびロジック電源(VDD)E1041が供給される。また、ASIC E1102からのヘッド電源ON信号(VHON)E1022及びモータ電源ON信号(VMON)E1023が電源ユニットE0015に入力され、それぞれヘッド電源E1039およびモータ電源E1040のON/OFFを制御する。電源ユニットE0015から供給されたロジック電源(VDD)E1041は、必要に応じて電圧変換された上で、メインPCB E0014内外の各部へ供給される。
またヘッド電源信号E1039は、メインPCB E0014上で平滑化された後にCRFFC E0012へと送出され、記録ヘッドカートリッジH1000の駆動に用いられる。
ASIC E1102は1チップの演算処理装置内蔵半導体集積回路であり、前述したモータ制御信号E1106、オプション制御信号E0108、電源制御信号E1024、ヘッド電源ON信号E1022、およびモータ電源ON信号E1023等を出力する。そして、ホストI/F E0017との信号の授受を行うとともに、パネル信号E0107を通じて、フロントパネル上のデバイスI/F E0100との信号の授受を行う。さらに、PEセンサE0007からのPE検出信号(PES)E1025、ASFセンサE0009からのASF検出信号(ASFS)E1026、カバーセンサE0022からのカバー検出信号(COVS)E1042、パネル信号E0107、センサ信号E0104、およびOnCRセンサ信号E1105の状態を検知して、パネル信号E0107の駆動を制御してフロントパネル上のLEDE0020の点滅を行う。
さらにASIC E1102は、エンコーダ信号(ENC)E1020の状態を検知してタイミング信号を生成し、ヘッド制御信号E1021で記録ヘッドカートリッジH1000とのインタフェイスをとり記録動作を制御する。ここにおいて、エンコーダ信号(ENC)E1020はCRFFC E0012を通じて入力されるCRエンコーダセンサE0004の出力信号である。また、ヘッド制御信号E1021は、フレキシブルフラットケーブルE0012、キャリッジ基板E0013、およびヘッドコネクタE0101を経て記録ヘッドH1001に供給される。
図23は、ASIC E1102の内部構成例を示すブロック図である。なお、図23において、各ブロック間の接続については、記録データやモータ制御データ等、ヘッドや各部機構部品の制御にかかわるデータの流れのみを示しており、各ブロックに内蔵されるレジスタの読み書きに係わる制御信号やクロック、DMA制御にかかわる制御信号などは図面上の記載の煩雑化を避けるため省略している。
図23中、E2107はクロック制御部であり、図示しないクロック発振回路からのクロック信号(CLK)E2031を入力とし、必要に応じ周波数を変換してASIC E1102内の大部分へと供給するクロック(図示しない)を発生する。
また、E2102はCPUであり、リセット信号E1015、ASIC内各ブロックから出力される割込み信号E2034、制御バスE1014からの制御信号により、以下に説明するような各ブロックに対するレジスタ読み書き等の制御や、一部ブロックへのクロックの供給、割り込み信号の受け付け等(いずれも図示しない)を行う。さらにCPU E2102は、内部にRAMを有し、外部デバイスからデバイスI/FE0100を通じて印刷ファイルを受信し、記録データに変換する処理も行う。
また、E2005はDRAMであり、記録用のデータバッファとして、受信バッファE2010、ワークバッファE2011、プリントバッファE2014、展開用データバッファE2016などの各領域を有すると共に、モータ制御用としてモータ制御バッファE2023を有する。
また、DRAM E2005は、CPU E2102の動作に必要なワーク領域しても使用されている。すなわち、DRAM制御部E2004による制御の下、制御バスによるCPU E2102からDRAM E2005へのアクセスと、後述するDMA制御部E2003からDRAM E2005へのアクセスとを切り替えて、DRAM E2005への読み書き動作を行っている。
DMA制御部E2003では、各ブロックからのリクエスト信号(図示せず)を受け付けて、アドレス信号や制御信号(図示せず)とともに、書込み動作の場合には書込みデータE2038、E2041、E2042、およびE2044などをDRAM制御部に出力してDRAMアクセスを行う。また読み出しの場合には、DRAM制御部E2004からの読み出しデータE2040、E2043、E2045、E2051などを、リクエスト元のブロックに受け渡す。
E2007はUniversal Serial Bus(USB)デバイスであり、CPU E2102の制御により、ホストI/F E0017を通じて、図示しない外部ホスト機器との双方向通信インタフェイスとなる。さらに、記録時にはホストI/F E0017からの受信データ(ホスト受信データE2037)をDMA処理により受信制御部E2008に受け渡す。
E2101はUSBホストであり、CPU E2102の制御により、デバイスI/FE0100を通じて、図示しない外部デバイス機器との双方向通信インタフェイスとなる。さらに、記録時にはデバイスI/F E0100からの受信データ(デバイス受信データE2108)をDMA処理により受信制御部E2008に受け渡す。
受信制御部E2008は、USBデバイスE2007もしくはUSBホストE2101のうちの選択されたI/Fからの受信データ(WDIF)E2038)を、受信バッファ制御部E2039の管理する受信バッファ書込みアドレスに、書込む。
E2009は圧縮・伸長DMAコントローラであり、CPU E2102の制御により、受信バッファE2010上に格納された受信データ(ラスタデータ)を、受信バッファ制御部E2039の管理する受信バッファ読み出しアドレスから読み出す。さらに、そのデータ(RDWK)E2040を指定されたモードに従って圧縮・伸長する。得られた各記録コードは、記録ヘッドカートリッジH1000へのデータ転送順序に適するようなワークバッファE2011上のアドレスに並べ替えて転送され、記録コード列WDWK E2041としてワークバッファ領域に書込まれる。
E2013は記録バッファ転送DMAコントローラで、CPU E2102の制御により、ワークバッファE2011上の記録コード(RDWP)E2043を読み出し、プリントバッファE2014に転送(WDWP E2044)する。
E2012はワーククリアDMAコントローラであり、CPU E2102の制御により、記録バッファ転送DMAコントローラ E2013による転送が完了したワークバッファ上の領域に対し、指定したワークフィルデータ(WDWF)E2042を繰返し書込む。
E2015は記録データ展開DMAコントローラであり、CPU E2102の制御により、ヘッド制御部E2018からのデータ展開タイミング信号E2050をトリガとして、プリントバッファ上に書込まれた記録コードと展開用データバッファE2016上に書込まれた展開用データ(展開記録データRDHDG E2045)とを読み出す。さらに、読み出したデータをカラムバッファ書込みデータ(WDHDG)E2047としてカラムバッファE2017に書込む。ここで、カラムバッファE2017は、記録ヘッドカートリッジH1000への転送データ(展開記録データ)を一時的に格納するSRAMであり、記録データ展開DMAコントローラE2015とヘッド制御部E2018とのハンドシェーク信号(図示せず)によって、両ブロックに共有管理されている。
E2018はヘッド制御部であり、CPU E2102の制御により、ヘッド制御信号を介して記録ヘッドカートリッジH1000とのインタフェイスを行う。また、センサ信号処理部E2022からのヘッド駆動タイミング信号E2049に基づき、記録データ展開DMAコントローラに対してデータ展開タイミング信号E2050の出力を行う。さらに、記録時には、ヘッド駆動タイミング信号E2049に従って、カラムバッファから展開記録データ(RDHD)E2048を読み出し、そのデータをヘッド制御信号E1021として記録ヘッドカートリッジH1000に出力する。
E2022はセンサ信号処理部であり、センサ信号E0104、OnCRセンサ信号E1105、PE検出信号E1025、ASF検出信号E1026、カバー検出信号E1042、を受けて、CPU E2102の制御で定められたモードに従ってこれらのセンサ情報をCPU E2102に伝達する。また、モータ制御部E2103に対してセンサ検出信号E2052を出力する。さらに、エンコーダ信号(ENC)を受けて、CPU E2102の制御で定められたモードに従ってヘッド駆動タイミング信号E2049を出力する他、エンコーダ信号E1020から得られるキャリッジM4001の位置や速度にかかわる情報をレジスタに格納して、CPU E2102に提供する。CPU E2102はこの情報に基づき、CRモータE0001の制御における各種パラメータを決定する。同様に、センサ信号E0104を構成するLFエンコーダセンサ信号を受けて、紙送りの位置や速度にかかわる情報をレジスタに格納して、CPU E2102に提供する。CPU E2102はこの情報に基づき、LFモータE0002の制御における各種パラメータを決定する。
E2104はA/Dコンバータであり、センサ信号E0104を構成するメディア判別センサ出力およびインクエンプティセンサ出力、OnCRセンサ信号E1105を構成する環境温度検出サーミスタ出力、反射型センサ出力、ヘッド温度検出出力などのアナログ信号をデジタル値に変換し、CPU E2102の制御で定められたモードに従ってこれらのセンサ検出情報をCPU E2102に伝達する。
モータ制御部E2103は、CPU E2102の制御により、必要に応じてDRAME2005上のモータ制御バッファE2023からモータ駆動テーブル(RDPM)E2051を読み出してモータ制御信号E1106を出力する。また、動作モードによっては各種センサ検出信号を制御のトリガとして、モータ制御信号E1106を出力する。
E2105はパネルI/F部であり、CPUE2102の制御により、パネル信号E0107を構成するLED制御信号を出力する。また、パネル信号を構成する電源キーおよびリジュームキーの状態出力信号を受けて、CPU E2102に伝達する。
E2029はポート制御部であり、CPU E2102の制御により、ヘッド電源ON信号E1022、モータ電源ON信号E1023、及び電源制御信号E1024を出力する。
(記録ヘッド構成)
以下に本実施形態で適用するヘッドカートリッジH1000の構成について説明する。本実施形態におけるヘッドカートリッジH1000は、記録ヘッドH1001と、インクタンクH1900を搭載する手段、およびインクタンクH1900から記録ヘッドにインクを供給するための手段を有しており、キャリッジM4000に対して着脱可能に搭載される。
図24は、本実施形態で適用するヘッドカートリッジH1000に対し、インクタンクH1900を装着する様子を示した図である。本実施形態の記録装置は、シアン、マゼンタ、イエロー、ブラック、レッド、グリーン、およびブルーの7色のインクによって画像を形成し、従ってインクタンクH1900も7色分が独立に用意されている。そして、図に示すように、それぞれがヘッドカートリッジH1000に対して着脱自在となっている。尚、インクタンクH1900の着脱は、キャリッジM4000にヘッドカートリッジH1000が搭載された状態で行えるようになっている。
図25は、ヘッドカートリッジH1000の分解斜視図を示したものである。図において、ヘッドカートリッジH1000は、第1の記録素子基板H1100および第2の記録素子基板H1101、第1のプレートH1200、第2のプレートH1400、電気配線基板H1300、タンクホルダーH1500、流路形成部材H1600、フィルターH1700、シールゴムH1800などから構成されている。
第1の記録素子基板H1100および第2の記録素子基板H1101はSi基板であり、その片面にインクを吐出するための複数の記録素子(ノズル)がフォトリソグラフィー技術により形成されている。各記録素子に電力を供給するAI等の電気配線は、成膜技術により形成されており、個々の記録素子に対応した複数のインク流路もまた、フォトリソグラフィー技術により形成されている。さらに、複数のインク流路にインクを供給するためのインク供給口が裏面に開口するように形成されている。
図26は、第1の記録素子基板H1100および第2の記録素子基板H1101の構成を説明するための正面拡大図である。H2000〜H2600は、それぞれ異なるインク色に対応する記録素子の列(以下ノズル列ともいう)であり、第1の記録素子基板H1100には、シアンインクの供給されるノズル列H2000、マゼンタインクの供給されるノズル列H2100、およびイエローインクの供給されるノズル列H2200の3色分のノズル列が構成されている。第2の記録素子基板H1101には、ブラックインクの供給されるノズル列H2300、レッドインクの供給されるノズル列H2400、グリーンインクの供給されるノズル列H2500、およびブルーインクの供給されるノズル列H2600の4色分のノズル列が構成されている。
各ノズル列は、記録媒体の搬送方向に1200dpi(dot/inch)の間隔で並ぶ768個のノズルによって構成され、約2ピコリットルのインク滴を吐出させる。各ノズル吐出口における開口面積は、およそ100平方μm2に設定されている。また、第1の記録素子基板H1100および第2の記録素子基板H1101は第1のプレートH1200に接着固定されており、ここには、第1の記録素子基板H1100および第2の記録素子基板H1101にインクを供給するためのインク供給口H1201が形成されている。
さらに、第1のプレートH1200には、開口部を有する第2のプレートH1400が接着固定されており、この第2のプレートH1400は、電気配線基板H1300と第1の記録素子基板H1100および第2の記録素子基板H1101とが電気的に接続されるように、電気配線基板H1300を保持している。
電気配線基板H1300は、第1の記録素子基板H1100および第2の記録素子基板H1101に形成されている各ノズルからインクを吐出するための電気信号を印加するものであり、第1の記録素子基板H1100および第2の記録素子基板H1101に対応する電気配線と、この電気配線端部に位置し記録装置本体からの電気信号を受け取るための外部信号入力端子H1301とを有している。外部信号入力端子H1301は、タンクホルダーH1500の背面側に位置決め固定されている。
一方、インクタンクH1900を保持するタンクホルダーH1500には、流路形成部材H1600が例えば超音波溶着により固定され、インクタンクH1900から第1のプレートH1200に通じるインク流路H1501を形成している。
インクタンクH1900と係合するインク流路H1501のインクタンク側端部には、フィルターH1700が設けられており、外部からの塵埃の侵入を防止し得るようになっている。また、インクタンクH1900との係合部にはシールゴムH1800が装着され、係合部からのインクの蒸発を防止し得るようになっている。
さらに、前述のようにタンクホルダーH1500、流路形成部材H1600、フィルターH1700及びシールゴムH1800から構成されるタンクホルダー部と、第1の記録素子基板H1100および第2の記録素子基板H1101、第1のプレートH1200、電気配線基板H1300及び第2のプレートH1400から構成される記録ヘッド部H1001とを、接着等で結合することにより、ヘッドカートリッジH1000が構成されている。
図27は、本実施形態における画像データ変換処理の流れを説明するためのブロック図である。本実施形態で適用するインクジェット記録装置は、シアン、マゼンタ、イエロー、ブラックの基本色であるインクのほかに、レッド、グリーンおよびブルーによって記録を行うものであり、そのためにこれら7色のインクを吐出する記録ヘッドが用意されている。図27に示すように、ここに示す各処理は、記録装置とホスト装置としてのパーソナルコンピュータ(PC)によって構成されるものとする。
ホスト装置のオペレーティングシステムで動作するプログラムとしてアプリケーションやプリンタドライバがあり、アプリケーションJ0001は記録装置で記録する画像データを作成する処理を実行する。実際の記録時にはアプリケーションで作成された画像データがプリンタドライバに渡される。
本実施形態におけるプリンタドライバはその処理として、前段処理J0002、後段処理J0003、γ補正J0004、ハーフトーニングJ0005、および記録データ作成J0006を有するものとする。以下、プリンタドライバで行われる各処理J0002〜J0006について簡単に説明する。
(A)前段処理
前段処理J0002は色域(Gamut)のマッピングを行う。そして、sRGB規格の画像データR、G、Bによって再現される色域を、記録装置によって再現される色域内に写像するためのデータ変換を行う。具体的にはR、G、Bのそれぞれが8bitで表現されたデータを3次元のLUT(ルックアップテーブル)を用いることにより、異なる内容のR、G、Bの8bitのデータに変換する。
(B)後段処理
後段処理J0003は、上記色域のマッピングがなされたデータR、G、Bに基づき、このデータが表す色を再現するインクの組み合わせに対応した色分解データY、M、C、K、R、GおよびBを求める処理を行う。ここでは前段処理と同様に、3次元LUTにて補間演算を併用して行うものとする。
(C)γ処理
γ補正J0004は、後段処理J0003によって求められた色分解データの各色のデータごとにその階調値変換を行う。具体的には、記録装置の各色インクの階調特性に応じた1次元LUTを用いることにより、上記色分解データが記録装置の階調特性に線形的に対応づけられるような変換を行う。
(D)ハーフトーニング
ハーフトーニングJ0005は、8ビットの色分解データY、M、C、K、R、GおよびBそれぞれについて4ビットのデータに変換する量子化を行う。本実施形態では、誤差拡散法を用いて256階調の8ビットデータを、9階調の4ビットデータに変換する。この4ビットデータは、記録装置におけるドット配置のパターン化処理における配置パターンを示すためのインデックスとなるデータである。
(E)記録データの作成処理
プリンタドライバで行う処理の最後には、記録データ作成処理J0006によって、上記4ビットのインデックスデータを内容とする記録イメージデータに記録制御情報を加えた記録データを作成する。記録制御情報は、「記録媒体情報」や「記録品位情報」、「余白無し記録指定情報」等から構成されている。記録媒体情報には、記録の対象となる記録媒体の種類が記述されており、普通紙、光沢紙、はがき、プリンタブルディスクなどのうち、いずれか1種類の記録媒体が規定されている。また、記録品位情報には、記録の品位が記述されており、「高品位」、「ふつう」、「高速」等のうち、いずれか1種の品位が規定されている。記録品位情報が「高品位」を示す場合には、記録装置で高品位記録モードが実行され、記録品位情報が「高速」を示す場合には、記録装置で高速記録モードが実行される。なお、これらの記録制御情報は、ホスト装置のモニタおけるUI画面にてユーザが指定した内容に基づいて形成されるものである。また、記録イメージデータは、前述のハーフトーン処理J0005によって生成された画像データが記述さているものとする。以上のようにして生成された記録データは、記録装置へ供給される。
記録装置は、入力されてきた上記記録データに対し、ドット配置パターン化処理J0007およびマスクデータ変換処理J0008を行う。
(F)ドット配置パターン化処理
次に、ドット配置パターン化処理J0007について説明する。上述したハーフトーン処理では、256値の多値濃度情報(8ビットデータ)を9値の階調値情報(4ビットデータ)までにレベル数を下げている。しかし、実際に本実施形態のインクジェット記録装置が記録できる情報は、インクを記録するか否かの2値情報である。ドット配置パターン化処理では、0〜8の多値レベルをドットの有無を決定する2値レベルまで低減する役割を果たす。具体的には、このドット配置パターン化処理J0007では、ハーフトーン処理部からの出力値であるレベル0〜8の4ビットデータで表現される画素ごとに、その画素の階調値(レベル0〜8)に対応したドット配置パターンを割当て、これにより1画素内の複数のエリア各々にドットのオン・オフを定義し、1画素内の各エリアに「1」または「0」の1ビットの吐出データを配置する。
図28は、本実施形態の高画質モードにおけるドット配置パターン化処理で変換する、入力レベル0〜8に対する出力パターンを示している。図の左に示した各レベル値は、ハーフトーン処理部からの出力値であるレベル0〜レベル8に相当している。右側に配列した縦2エリア×横4エリアで構成される領域は、ハーフトーン処理で出力された1画素(ピクセル)の領域に対応するもので、縦横ともに600ppi(ピクセル/インチ)の画素密度に対応する大きさとなっている。また、1画素内の各エリアは、ドットのオン・オフが定義される最小単位に相当するもので、縦が1200dpi(ドット/インチ)、横が2400dpiの記録密度に対応するものである。本実施形態の記録装置では、上記記録密度に対応した、縦が約20μm、横が約10μmで表現される1つのエリアに対し、2plのインク滴が1つ記録されて所望の濃度が得られる様に設計されている。
また、図28において、縦方向は記録ヘッドの吐出口が配列する方向であり、エリアの配列密度と吐出口の配列密度とが1200dpiという値で一致している。横方向は記録ヘッドの走査方向を示しており、本実施形態の高画質写真モードでは、記録ヘッドは2400dpiの密度で記録を行う構成となっている。
更に、図28において、丸印を記入したエリアがドットの記録を行うエリアを示しており、レベル数が上がるに従って、記録するドット数も1つずつ増加している。
(4n)〜(4n+3)は、nに1以上の整数を代入することにより、入力画像の左端からの横方向の画素位置を示している。また、その下に示した各パターンは、同一の入力レベルにおいても画素位置に応じて互いに異なる複数のパターンが用意されていることを示している。すなわち、同一のレベルが入力された場合にも、記録媒体上では(4n)〜(4n+3)に示した4種類のドット配置パターンが巡回されて割当てられる構成となっているのである。そして、このような構成にしておくことは、ドット配置パターンの上段に位置するノズルと下段に位置するノズルとで吐出回数を分散させたり、記録装置特有の様々なノイズを分散させたりする効果が得られるのである。
本実施形態においては、最終的にこのような形でオリジナル画像の濃度情報が反映され、ドット配列パターン化処理を終了した段階で、記録媒体に対するドットの配列パターンが全て決定される。
(G)マスクデータ変換処理
上述したドット配置パターン化処理により、記録媒体上の各エリアに対するドットの有無は決定されたので、この情報をそのまま記録ヘッドの駆動回路J0009に入力すれば、所望の画像を記録することは可能である。この場合、記録媒体上の同一の走査領域に対する記録を1回の走査によって完成させる、いわゆる1パス記録が実行される。しかし、しかし、ここでは、記録媒体上の同一の走査領域に対する記録を複数回の走査によって完成させる、いわゆるマルチパス記録の例をとって説明する。
図4は、マルチパス記録方法を説明するために、記録ヘッドおよび記録パターンを模式的に示したものである。P0001は記録ヘッドを示し、ここでは簡単のため16個の記録素子(ノズル)を有するものとする。ノズルは、図のように第1〜第4の4つのノズル群に分割され、各ノズル群には4つずつのノズルが含まれている。マスクパターンP0002は第1〜第4のマスクパターンP0002(a)〜P0002(d)で構成される。第1〜第4のマスクパターンP0002(a)〜P0002(d)は、それぞれ、第1〜第4のノズル群が記録可能なエリアを定義している。マスクパターンにおける黒塗りエリアは記録許容エリアを示し、白塗りエリアは非記録エリアを示している。第1〜第4のマスクパターンP0002(a)〜P0002(d)はは互いに補完の関係にあり、これらを重ね合わせると4×4のエリアに対応した領域の記録が完成される構成となっている。
P0003〜P0006で示した各パターンは、記録走査を重ねていくことによって画像が完成されていく様子を示したものである。各記録走査が終了するたびに、記録媒体は図の矢印の方向にノズル群の幅分ずつ搬送される。よって、記録媒体の同一領域(各ノズル群の幅に対応する領域)は4回の記録走査によって初めて画像が完成される構成となっている。
以上のように、記録媒体の各領域が複数回の走査で複数のノズル群によって形成されることは、ノズル特有のばらつきや記録媒体の搬送精度のばらつき等を低減させる効果がある。また、マスクパターンの配列に工夫を施すことによって、他の様々な画像問題や記録装置の信頼性の問題などに対しても、対応策をとることが可能となる。
例えば、近年のように、多数の小液滴を高周波数で吐出するようなインクジェット記録ヘッドにおいては、記録ヘッドの端部に位置するノズルの吐出方向が内斜してしまう傾向がある。この場合、ノズル列の端部に位置するノズルによって形成されるドットは、正規の位置からずれた内側の位置に着弾するので、記録ヘッドの記録幅のピッチで、白スジ(以下、「端スジ」と称する)が生じてしまうことが確認されている。この様な状況であっても、上述したマスクパターンの配列を工夫することによって、端スジを目立たなくすることが出来る(例えば特開2002−096455号公報参照)。
図5は、上記端スジを低減するために採用されるマスクパターンの一例を示した図である。図5のマスクパターンの黒エリアは図4のマスクパターンの黒エリアと同じ役割を担う箇所であり、記録を許容するエリアを示す。図5のマスクパターンの白エリアは図4のマスクパターンの白エリアと同じ役割を担う箇所であり、記録を許容しないエリアを示す。ここでは768個のノズルを有する記録ヘッドを用い、4パスのマルチパス記録を実施する場合を例に示している。図4の場合と同様に、全768ノズルは4つのノズル群に分割されているが、ここではノズルの位置によってマスクパターンの記録率(マスクパターンを構成する黒エリアと白エリアの合計数に対する黒エリアの数の割合)が異なっているのがわかる。第1ノズル群に対応するマスクパターンの記録率はN%、第2ノズル群に対応するマスクパターンの記録率はM(但し、M>N)%、第3ノズル群に対応するマスクパターンの記録率はM%、第4ノズル群に対応するマスクパターンの記録率はN%となっており、これら4つのノズル群に対応したマスクパターンの記録率の合計(N+M+M+N)は100%となる。このように中央部のノズルの記録率は比較的高く設定されているが、端部に行くに従って記録率は徐々に低くなっている。
上述した吐出方向の内斜は、より小液滴のインクが、より高速に、より高密度に記録されるほど顕著に現れることが確認されている。よって、端部ノズルの記録率を中央部ノズルに比べて低く設定することは、端部に位置するノズルの内斜傾向を和らげることが出来る。また、多少内斜傾向にあったとしても、吐出されるドットの数自体が低減されているので、着弾位置ずれによる端スジを目立たなくする効果も得られる。
本実施形態においては、上述の図5に示したマスクパターンが、記録装置本体内のメモリに格納されている。そして、マスクデータ変換処理J0008においては、当該マスクデータと上述したドット配置パターン化処理J0007により出力された2値データとの間でAND処理を行うことにより、各記録走査での記録対象となる2値データが決定され、その2値データが駆動回路J0009に入力される。これにより、記録ヘッドH1001が駆動されて2値データに従ってインクが吐出される。
なお、本実施形態においては、後述するように記録モードの種類(高品位記録モードと高速記録モード)と記録媒体上の記録位置(中央部あるいは端部)によって用いるマスクパターンを異ならせている。詳しくは、記録媒体の中央部に対する記録のための第1マスクパターンと記録媒体の端部(先端部あるいは後端部の少なくとも一方)に対する記録のための第2マスクパターンが記録モードそれぞれについて設けられている。従って、メモリには、高品位記録モード用の第1および第2マスクパターンと、高速記録モード用の第1および第2マスクパターンが格納されている。
(記録媒体先後端部での記録)
本実施形態の記録装置は、記録媒体の端部に余白を設けずに画像の記録を行う、いわゆる「余白無し記録」を実現可能な記録装置とする。
図6は、本実施形態の記録装置でA4サイズの記録媒体に余白無し記録を実行する際の、先端部、中央部および後端部の領域をそれぞれ示した図である。すなわち、図1〜図3を用いて説明したように、記録媒体の先端が排紙ローラM3100に支持される以前に記録される領域を先端部、記録媒体の後端が搬送ローラM3060から外れた後に記録される領域を後端部としている。また、先端部と後端部以外の領域を中央部としており、当該中央部は搬送ローラM3060と排紙ローラM3100の両方にて記録媒体が保持された状態で記録される領域である。
以下説明のため3種類の搬送状態を次のように定義する。すなわち、搬送ローラによって支持され、排紙ローラによって支持されない状態の搬送動作を第1搬送動作とする。また、搬送ローラおよび排紙ローラの双方によって支持される状態の搬送動作を第2搬送動作とする。更に、搬送ローラによって支持されず、排紙ローラによって支持されている状態の搬送動作を第3搬送動作とする。このように搬送動作を定義した状態でより厳密に考慮すると、マルチパス記録を実行する場合には、記録領域を次の5つの領域に分割できる。すなわち、第1搬送動作のみを介在させた複数回のパスによって画像が完成される領域A、第1搬送動作と第2搬送動作を介在させた複数回のパスによって画像が完成される領域B、第2搬送動作のみを介在させた複数回のパスによって画像が完成される領域C、第2搬送動作と第3搬送動作を介在させた複数回のパスによって画像が完成される領域D、更に第3搬送動作のみを介在させた複数回のパスによって画像が完成される領域Eである。以下に説明する実施形態においては、上記5つの領域について、領域Aと領域Bを先端部、領域Cを中央部、領域Dと領域Eを後端部とし、用意した2種類のマスクパターンを適用させている。
本実施形態では、配列するノズル列のうち、より下流側(排紙ローラ側)に位置する一部分のノズルによって、先端部および後端部への記録を行っている。従って、先端部として扱われる領域よりも後端部として扱われる領域のほうが若干広くなっている。
(マスクパターンの記録率と画像品位との関係)
以下に、発明者らが行った検討について説明する。図7は、発明者らが作成した、複数のマスクパターンの記録率をグラフとして示した図である。図7において、横軸は記録ヘッド上に配列する768本のノズルの位置を示している。また、縦軸は、それぞれのノズルに対する記録率を示している。本発明者らは、本検討を実行するためにa〜eの5種類のマスクパターンを作成した。本検討においては、4パスのマルチパス記録に適用可能なマスクパターンとしているため、曲線a〜eそれぞれの平均記録率はどれも25%となっている。ここで、平均記録率は、同一領域を完成させるのに要するパス数をKとしたとき、100/Kで表される。
なお、マスクパターンの記録率とは、マスクパターンを構成する記録許容エリア(図5の黒エリア)と非記録許容エリア(図5の白エリア)の合計数に対する記録許容エリアの数の割合を百分率で表したものである。以下、これを具体的に説明する。例えば、図5のマスクパターンの横方向(ノズル並び方向と直交する方向)の大きさが768エリア分であった場合を考える。すると、1つのノズルに対応するマスクパターンを構成する記録許容エリアと非記録許容エリアの合計数は768個となる。この768個のエリアのうち、記録許容エリアが192個、非記録許容エリアが576個であった場合、このノズルに対応するマスクパターンの記録率は25(=192/768×100)%ということになる。
さて、図7のa〜eの全ての曲線において、記録率の分布は中央部が高く端部が低くなっているが、その中でも最も両者の記録率の差が小さいのが曲線aである。曲線aでは、中央部の記録率が35%、両端部の記録率が15%となっており、平均記録率25%に対する端部の記録率の割合は、15/25=0.6となっている。以後、このような平均記録率に対する端部記録率の割合を、端部記録率比と称することとする。
一方、中央部と端部の記録率の差が最も大きいのが曲線eである。曲線eでは、中央部の記録率が45%、両端部の記録率が5%であり、平均記録率25%に対する端部の記録率の割合は、5/25=0.2となっている。b〜dの曲線はaとeの間を均等内分される特性を有するマスクパターンの記録率を示している。
図8は、図7で示したa〜eのマスクについて、端部の記録率、中央部の記録率および端部記録率比を示した表である。b、c、dのマスクパターンについては、それぞれ端部記録率比が0.5、0.4および0.3となっている。
図9(A)は、図7のaで示したマスクパターンの例を示している。図9Aでは縦方向が768個のノズル並び方向に相当しており、中央部ノズルの記録率が35%、両側最端部ノズルの記録率が15%となっている。図9(B)は、図9(A)と同様の端部記録率比を有しながらも、256ノズルで記録する際のマスクパターンを示している。図9Bにおいても、中央部ノズルの記録率は35%、両側最端部ノズルの記録率は15%となっている。
図10(A)は、図7のdで示したマスクパターンの例を示している。図10Aでは縦方向が768個のノズル並び方向に相当しており、中央部ノズルの記録率が42.5%、両側最端部ノズルの記録率が7.5%となっている。図10(B)は、図9(A)と同様の端部記録率比を有しながらも、256ノズルで記録する際のマスクパターンを示している。図10Bにおいても、中央部ノズルの記録率は42.5%、両側最端部ノズルの記録率は7.5%となっている。図10(A)および(B)ともに、図9(A)および(B)で示したマスクパターンよりも、中央部の記録率が高く、両端部の記録率が低くなっていることが確認できる。
本発明者らは、先端部および後端部での記録状態を再現するために、図9(B)や図10(B)で示したような、256ノズル用のマスクパターンを用いて、搬送量のばらつきに対する画像の乱れを確認した。以下に、具体的な検討方法を説明する。
本実施形態の記録装置においては、記録ヘッド上の各ノズルは1200dpiで配列している。よって、連続する256ノズルを用いて4パスのマルチパス記録を行う場合、各記録走査間で行われるべき搬送量は、
25.4(mm/inch)/1200×256/4≒1.3547(mm)
となる。この値に対して、1μmずつ搬送量を前後に変化させながら、上記マスクパターンを用いて、グレーやその他の色相における一様性の高い複数種類のパターンを記録した。その後、出力された画像を目視で観察することにより、搬送量が小さすぎる場合に発生する黒スジや、搬送量が大きすぎる場合に発生する白スジの目立ち方にについて、評価を行った。
図11は、上記目視での評価結果を説明するための図である。図11において、横軸はマスクパターンの端部記録率比を示している。また、縦軸は、正規の搬送量に対する搬送誤差(ずれ量)を示している。5つの矢印は、作成した5種類のマスクパターンa〜eに対応し、それぞれ、許容できる搬送誤差量の範囲を矢印で示している。図によれば、端部記録率比が0.6であるaのマスクパターンでは、正規の搬送量に対し±3μm程度の誤差しか許容できないのに対し、端部記録率比が0.3であるdのマスクパターンでは、−4〜+12μm程度の誤差が許容出来ていることが確認できる。なお、端部記録率比が0.2であるeのマスクパターンについては、検討を行った誤差範囲全体にわたって、白スジや黒スジが目立つことは無かったので、ここでは破線の矢印で確認された領域を示している。
以上の結果より、評価を行ったマスクパターンのうち、より左側にあるもの、すなわち、端部記録率比が小さいマスクパターンほど、白スジ、黒スジが目立ちにくいことが分かる。搬送量のばらつきに起因する白スジや黒スジは、記録ヘッドの各記録走査間のつなぎ部分、すなわち記録領域の端部に現れるものである。よって、最も弊害の現れやすい領域の記録率を下げて、黒スジや白スジの存在を希薄な状態にしておきながら、別の記録走査でこの部分をカバーするノズル群の記録率を高く設定することにより、つなぎ部における白スジや黒スジを目立ちにくくすることが出来るのだと推測される。以下に、端部記録率比(マスクパターンの勾配)と画像弊害との関係を本発明者らが検証した結果を説明する。
図29(A)〜(C)および図30(A)〜(C)は、端部記録率比が画像品位に及ぼす影響を説明するための図である。各図において、横軸は搬送方向に対する記録媒体上の位置を1画素単位で示している。縦軸は、各位置に対するマスクパターンの記録率を示している。本例は、4パスのマルチパス記録を実行した場合を示しており、各位置は実線や破線で示した複数のマスクパターンによって記録が行われている。また、グラフの上部に示された太い実線は、各位置における画像濃度を示し、矢印で示した箇所は、記録素子列の端部で記録される位置、すなわち記録走査のつなぎ部となる位置を示している。
図30(A)〜(C)は、グラデーションの勾配が比較的小さい、即ち、端部記録率比が大きい4パス用のマスクパターンを用い、記録媒体の搬送量を正規の量よりも短くあるいは長いくした場合の黒すじや白すじの発生状態を示している。図30(A)は搬送量が正規の量であった場合を示している。この場合、搬送量が正規量であるので、画像上には黒すじも白スジも現れていない。これに対し、図30(B)は搬送量が正規よりも短い量であった場合を示している。この場合、矢印で示したつなぎ部には、他の領域よりも濃度の高い部分、すなわち黒すじが確認される。更に、図30(C)は搬送量が正規よりも長い量であった場合を示している。この場合、矢印で示したつなぎ部には、他の領域よりも濃度の低い部分、すなわち白すじが確認される。
一方、図29(A)〜(C)は、グラデーションの勾配が比較的大きい、即ち、端部記録率比が小さい4パス用のマスクパターンを用いた場合の黒すじや白すじの発生状態を示している。図29(A)は搬送量が正規の量であった場合を示している。この場合、図30(A)と同様に、画像上には黒すじも白すじも現れていない。これに対し、図29(B)は搬送量が正規よりも短い量であった場合を示している。この場合、図30(B)と同様の理由から黒すじが確認されるが、図30(B)よりも黒すじは軽減されている。更に、図29(C)は搬送量が正規よりも長い量であった場合を示しているが、この場合においても、図30(C)よりも、白すじが軽減されている。
以上の検討結果によれば、端部記録率比が小さいマスクパターンほど、搬送誤差によって生じる黒すじや白すじが目立ちにくいことが分かる。但し、その一方で、実際に観察を行った画像においては、端部記録率比が小さいマスクパターンほど、1回の記録走査での記録領域の中央部のマスクパターン記録率が高い部分に濃度の高い部分が現れることが確認された。より詳しく説明すると、このバンド状の濃度ムラは、端部記録率比の大きいaのマスクパターンでは確認されなかったものの、bのマスクパターンでは僅かに存在が確認される程度となり、c、d、eと端部記録率比が小さくなるにつれて、よりはっきりと認識される傾向にあった。
明確なメカニズムは断定できないが、一連のノズル列の中で、記録率の偏りがあまりにも激しいと、温度分布や吐出頻度の差から吐出性能に差が生じることも確認されている。また、記録走査で記録媒体に打ち込むインク滴の密度により、記録媒体上でインク滴が記録媒体に浸透・定着する前につながる頻度が異なることも考えられる。それが前記濃度の濃い部分が現れる原因となっている可能性もある。
また、特開2002−096455号公報に開示されているような本来のグラデーションマスクにおいては、記録率の分布を滑らかな曲線に保っておくことで、端部ヨレを防止し、端スジを目立たなくする効果が得られる。しかし、eのマスクパターンのように記録率の変動があまりに激しいと、その十分な効果が得られない懸念も生じてくる。更にまた、インクジェット記録ヘッドの複数のノズルにおいては、記録率を出来るだけ一様にしておく方が、寿命の観点からも好ましいと言える。
以上の検討結果から、本発明者は、次のような知見を得た。すなわち、搬送誤差に伴って生じる白スジや黒スジを低減するには、端部記録率比の小さいマスクパターン(勾配が大きいマスクパターン)を用いることが有利である。その一方で、白スジや黒スジがあまり目立たない場合には、端部記録率比の大きいマスクパターン(勾配が小さいマスクパターン)を用いることが有利である。
(記録モードの構成)
以上の検討結果を踏まえ、記録速度を重視して画像を出力する高速記録モード、および画像品位を重視して画像を出力する高品位記録モードの2つの記録モードにて、余白無し記録を実現する場合について説明する。なお、後述から明らかなように、高品位記録モードは、中央部記録時に使用するノズル数(768個)に比べて先後端部記録時に使用するノズル数(64個)を低減させており、その低減の割合((768−64)/768=11/12)を比較的大きくし、1回の走査における記録幅を比較的小さくすることで、高品位印字を実現している。一方、高速記録モードでは、中央部記録時に使用するノズル数(768個)に比べて先後端部記録時に使用するノズル数(256個)を低減させているが、その低減の割合((768−256)/768=2/3)を比較的小さく、1回の走査における記録幅を比較的大きくすることで、高速印字を実現している。
図12(A)は、本実施形態の高速記録モードにおいて、記録媒体の中央部で適用するマスクパターンの記録率分布を示した図である。ここでは、4パスのマルチパス記録を実行するものとし、図7の曲線aで示したマスクパターンが適用されている。すなわち、全ノズル数768のうち、最端部のノズルの記録率は15%、中央部のノズルの記録率は35%、更に端部記録率比は0.6となっている。
図12(B)は、上記記録率および端部記録率比を図12(A)と同値に保ったまま、記録に用いるノズル数を128まで制限した状態のマスクパターンを示している。従来、一般的に適用されてきた先後端部領域におけるマスクパターンは、このように中央部で適用されるマスクパターンと同等の端部記録率比を有するものであった。
図12(C)は、本実施形態において、高速記録モードの先後端部領域で適用するマスクパターンを示している。ここでは、使用するノズル数を従来の2倍の256とし、図7において曲線dとして示したものと同等の記録率を有するマスクパターンを適用している。すなわち、中央部のノズルの記録率は42.5%、最端部のノズルの記録率は7.5%、端部記録率比は0.3となっている。
再度、図11を参照するに、搬送誤差については、端部記録率比が小さい程、その許容範囲が広くなっている。端部記録率比が0.6である曲線aに対し、端部記録率比が0.3である曲線dは、搬送誤差の許容範囲が2倍以上にも増大している。よって、記録幅すなわち記録に用いるノズル数を図12(B)の2倍に設定し、それに伴い搬送量も2倍に設定し、記録時間を1/2に短縮しても、画像品位は従来の状態を維持すること出来るのである。
図13(A)は、本実施形態の高品位記録モードにおいて、記録媒体の中央部で適用するマスクパターンの記録率分布を示した図である。ここでは、より画像品位を高めるために、8パスのマルチパス記録を実行する。全ノズル数768のうち、最端部のノズルの記録率は7.5%、中央部のノズルの記録率は17.5%となり、高速記録モードに比べて全体的に記録率が半減されている。ただし、端部記録率比は高速記録モード同等の0.6となっている。
図13(B)は、本実施形態との比較例として、上記記録率および端部記録率比を図13(A)と同値に保ったまま、記録に用いるノズル数を128まで制限した状態のマスクパターンを示している。
図13(C)は、本実施形態において、高品位記録モードの先後端部領域で適用するマスクパターンを示している。ここでは、使用するノズル数を図13(B)の1/2の64としている。但し、中央部および最端部のノズルの記録率は、夫々、図13(B)と同等の17.5%および7.5%としており、端部記録率比も0.6となっている。先にも説明したが、先端部および後端部における画像品位の乱れは、搬送量のばらつきによるもののみではない。紙間距離が不安定になることも、画像品位を劣化させる原因の1つである。本実施形態の高品位モードでは、この紙間距離の変動の影響も極力抑えるために、あえて使用するノズル数を低減した。以下に、この効果を具体的に説明する。
図14(A)および(B)は、本実施形態の高速記録モードと高品位記録モードにおける、記録に用いるノズル領域(使用ノズル数)と紙間距離の様子を説明するための模式図である。
図14(A)および(B)において、H1000は記録ヘッドであり、202は、記録ヘッドH1000上に配設された768本のノズル領域を示している。M3060は、記録媒体を搬送するための搬送ローラであり、M3070は、搬送ローラM3060とともに記録媒体を挟持し、高い精度で搬送するためのピンチローラである。M3100は、主に記録媒体の排紙を実行するための排紙ローラ、M3120は排紙時の記録媒体を支える拍車である。
M3040は、記録領域を通過する記録媒体を支持するプラテンである。208は、余白無し記録を実行する際に、記録媒体の最端部より外側にはみ出したインクを回収するために設けられたプラテン内の溝である。この溝208には、斜線部で示されるインク吸収体が設置されている。インク吸収体に吸収されたインクは、その後、記録装置本体の下部に設けられている不図示の廃インク吸収体に移動していく構成となっている。
209は、プラテンM3040に取り付けられたリブの一部である。余白無し記録時には、記録媒体の先後端のみでなく左右端に対しても、インクが記録媒体からはみ出して吐出される。図中の左側に位置する上流側リブ209と右側に位置する下流側リブ209との間隔は、この左右端の記録時に用いられる最大ノズル数(本実施形態の場合は、768ノズル)に対応した長さよりも大きい。また、210もプラテンに取り付けられたリブの一部である。図中の左側に位置する上流側リブ210と右側に位置する下流側リブ210との間隔は、記録媒体の先後端記録時に用いられる最大ノズル数(本実施形態の場合は、256ノズル)に対応した長さよりも大きい。
ここで、図14(A)は、高速記録モードにおける記録媒体Pの後端部への記録状態を示している。211は、後端部を記録する際に記録に用いる256本のノズルに対応する記録領域を示している。記録媒体Pが搬送ローラM3060から外れた以降、その最後端部は、一般に図14Aのように湾曲することが知られている。湾曲の程度は、記録環境、記録媒体の材質、画像の記録デューティーなどに影響されるが、多かれ少なかれ湾曲は起こり、記録領域211との紙間距離は、最後端部領域において急激に変化する。但し、湾曲の程度および紙間距離の変動も、記録媒体Pの最後端部がリブ210の上に位置しているか否かで変わってくる。図14(A)のように、記録媒体を支えている下流側リブ210から比較的大きな距離を隔てて記録媒体の最後端部が存在する場合には、湾曲の程度が大きく、紙間距離も通常値を大きく上回っている。これに対し、図14(B)のように、記録媒体の最後端部が、下流側リブ210に比較的近い場合には、湾曲の程度も少なく、紙間距離も通常値の変動が少ない。すなわち、なるべく下流側リブ210に接近した一部のノズルを用いて記録する状態を維持することにより、紙間距離の変動による画像品位の劣化を抑制することが出来るのである。
本実施形態の高品位記録モードでは、図14(B)の213で示したように、全768ノズルのうち、最も下流側リブ210に接近した64ノズルを記録領域213としている。これにより、後端部への記録においても紙間距離を好ましい状態に維持している。また、マルチパス数が8パスであることから、記録走査ごとに行われる搬送量も、64/8=8ノズル分と非常に少ない値になる。よって、搬送に伴う誤差も更に一層低減され、品位の高い余白無し記録が実現可能となる。但し、記録走査ごとに行われる搬送量が低減された分、記録走査の回数が増し、記録時間が増大する。
これに対し、図14(A)で示した高速記録モードでは、後端部の記録であっても256ノズルを記録に用い、且つ4パスのマルチパス記録としている。よって、記録走査ごとの搬送量は256/4=64ノズル分となり、後端部だけでも高品位記録モードに比べて8倍の速度で記録できる。但し、図14Aでも示したように、記録媒体を支えるリブ210から、より離れた位置のノズルまで記録に用いるので、紙間距離のばらつきによる画像品位の劣化は免れ得ない。しかし、この高速記録モードでは、図12A〜12Cで説明したように、後端部記録時に使用するノズルの端部に対応したマスクパターンの記録率(図12(C)参照)を中央部記録時(図12(A)参照)に比べ下げているため、端部ノズルから吐出されるインクの着弾ズレが減り、後端部での画像劣化の程度は従来よりも抑制される。
このように、本実施形態においては、目的の異なる2つの記録モードを用意し、それぞれに適切な記録方法で記録媒体の先端部および後端部の記録を実施している。ユーザは、記録を実行する際、画像品位や記録速度それぞれの重要度を考慮したうえで、上記2つのモードから1つを選択することが出来る。
図15は、本実施形態において、記録品位あるいは記録時間が互いに異なる記録モードに応じた記録方法を決定する際の処理工程を説明するためのフローチャートである。
まず、ステップS301において、記録装置が図27で説明した通り記録データを受信する。この記録データには、図27で説明した通り、ハーフトーン処理J0005によって生成された画像データ(記録イメージデータともいう)の他に、ユーザがプリンタドライバにおいて設定した記録制御情報も含まれている。記録制御情報には、例えば余白無し記録を行うか否かを示す余白無し記録指定情報や、高品位モードで記録するか高速モードで記録するか等の内容に相当する記録品位情報等が含まれる。
記録データの受信が終了すると、ステップS302に進み、当該記録が余白無し記録であるか否かを判断する。余白無し記録でない場合、ステップS303へ進み、記録媒体の端部に余白を設けて画像を記録する通常の記録モードを実行する。
ステップS302で余白無し記録であると判断された場合、ステップS304へ進み、記録モードが高品位モードであるか高速モードであるかを判断する。
ステップS304で、高速モードであると判断された場合は、ステップS305へ進む。ステップS305では、記録媒体の中央部を記録する際の記録モードとして、記録使用ノズル数を768、マルチパス数を4パス、記録媒体の搬送量を192ノズル相当に設定する。
次にステップS306に進み、記録媒体の先後端部を記録する際の記録モードとして、記録使用ノズル数を256、マルチパス数を4パス、記録媒体の搬送量を64ノズル相当に設定する。
更に、ステップS307に進み、中央部を記録する際に適用するマスクパターンを選択する。ここでは、図12(A)で示したマスクパターンが選択される。
次に、ステップS308に進み、先後端部を記録する際に適用するマスクパターンを選択する。ここでは、図12(C)で示したマスクパターンが選択される。
更に、ステップS309に進み、余白無し記録の高速モードが実行された後、本処理が終了する。
一方、ステップS304で、高品位モードであると判断された場合は、ステップS310へ進む。ステップS310では、記録媒体の中央部を記録する際の記録モードとして、記録使用ノズル数を768、マルチパス数を8パス、記録媒体の搬送量を96ノズル相当に設定する。
次にステップS311に進み、記録媒体の先後端部を記録する際の記録モードとして、記録使用ノズル数を64、マルチパス数を8パス、記録媒体の搬送量を8ノズル相当に設定する。
更に、ステップS312に進み、中央部を記録する際に適用するマスクパターンを選択する。ここでは、図13(A)で示したマスクパターンが選択される。
次に、ステップS313に進み、先後端部を記録する際に適用するマスクパターンを選択する。ここでは、図13(C)で示したマスクパターンが選択される。
更に、ステップS314に進み、余白無し記録の高品位モードが実行された後、本処理が終了する。
以上説明したように本実施形態においては、目的の異なる2つの記録モードで、記録媒体の先後端部への記録手法を異ならせている。ユーザは、記録を実行する際、画像品位や記録速度それぞれの重要度を考慮したうえで、複数のモードから1つを選択することが出来る。よって、意に反して記録時間を浪費してしまったり、予想以上に低品位の画像しか得られなかったりなどの状況は起こらず、満足のいく出力を実現することが可能となる。
なお、本実施形態においては、余白無し記録を実現する際の記録方法として説明してきたが、本発明は余白無し記録に限定されるものではない。余白のある画像であっても、図1〜図3で説明したように先端部または後端部の画像品位の劣化の恐れはある。このような問題は、余白無し記録を実行するか否かではなく、搬送ローラ、排紙ローラおよび記録ヘッドの記録領域の位置関係と精度、あるいは記録媒体の種類などによって、その現れ方はまちまちである。いずれが主な要因であれ、記録媒体の先後端部における画像品位の劣化が起こるような状況を、ユーザの目的に適応した速度と品位で対応することが出来れば、本発明は有効となる。
また、以上の説明では、記録媒体の先端部と後端部ともに、同じマスクパターンを適用したが、本発明はその構成に限定されるものではない。例えば、より搬送精度の低下が予想される後端部と、後端部ほど搬送精度が低下しないことが予想される先端部とで、異なるノズル数および異なるマスクパターンを適用してもよい。
更に、本発明で適用可能なマスクパターンの形態(記録許容エリアの配列形態)は、上述した図12A〜12Cや図13A〜13Cで示したグラデーションマスクに限定されるものではない。例えば、図4で示したような、各パスの記録率が均等となるように記録許容エリアが配列されたマスクパターンであっても良い。また、特開平6−330616号公報に開示されているような、記録許容エリアの配列にランダム性を持たせたマスクパターンであってもよい。また、特開2002−144522に記載されているような、記録許容エリアの配列に所定の分散性を持たせたマスクパターンを適用しても本発明は有効である。
また、上記実施形態では、4パスおよび8パスのマルチパス記録について説明してきたが、無論、本発明の効果は、これに限定されるものではなく、より多いパス数、あるいはより少ないパス数のマルチバス記録を適用してもよい。本発明の効果は、複数の記録モードそれぞれが、相応に目的を達成していれば、充分に発揮される。
更にまた、上記実施形態では、インクを滴として吐出するインクジェット記録ヘッドを用いて説明してきたが、本発明の効果はこのような記録方法に限定されるものではない。複数の記録素子を有する記録ヘッドが、図1〜図3で説明した搬送ローラおよび排紙ローラのような、記録媒体の搬送を促す少なくとも2つのローラの間に備えられた状態で、記録媒体の先端部、中央部あるいは後端部に画像を形成できる構成であれば、如何なる記録方法を適用したとしても本発明の効果を得ることは出来る。