JP4602179B2 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP4602179B2 JP4602179B2 JP2005197904A JP2005197904A JP4602179B2 JP 4602179 B2 JP4602179 B2 JP 4602179B2 JP 2005197904 A JP2005197904 A JP 2005197904A JP 2005197904 A JP2005197904 A JP 2005197904A JP 4602179 B2 JP4602179 B2 JP 4602179B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- phase
- frequency
- frequency spectrum
- calculating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images























Description
図1は、この発明の実施の形態1によるレーダ装置を示す構成図である。
図示のように、実施の形態1のレーダ装置は、周波数スペクトル計算手段101、ピーク信号選択手段102、選択信号相対速度計測手段103、選択信号位相変化量算出手段104、選択信号位相補償手段105、振幅算出手段106、信号再構成手段107、積分手段108、閾値検出手段109を備えている。
先ず、パルスヒット毎に得られる信号のサンプル番号をm’とし、A/D変換後の受信ビデオ信号をU(m’)とおく。
周波数スペクトル計算手段101は、A/D変換後の受信ビデオ信号U(m’)を入力とし、コヒーレント処理が可能な時間、即ち、目標が静止,もしくは等速で移動しているとみなせる時間間隔(CPI)毎に、例えば高速フーリエ変換(Fast Fourier Transform:FFT)処理等を行い、周波数ビン毎の信号成分、即ち、周波数スペクトルXk(n)を求める。受信信号を連続波(Continuous Wave :CW)とし、CPIをM個のA/D変換後の受信ビデオ信号の観測時間とした場合、受信信号U(m’)をM点毎にN回FFT処理した信号は式(1)で表される。

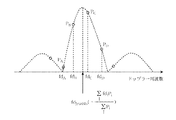
図2に、ピーク信号選択手段102の処理動作のイメージを示す。尚、図中、ハッチングで示す部分がピーク信号に相当している。
選択信号相対速度計測手段103は、ピーク信号選択手段102の出力としてCPI毎に選択されるピーク信号の存在する周波数ビンを選択周波数ビンselect(n)とし、select(n),(n=1,2,…,N)に相当するドップラー周波数fdselect(n)を式(2)より求め、式(3)によりピーク信号の相対速度vselect(n)に変換する。
選択信号位相変化量算出手段104は、CPI毎に選択信号相対速度計測手段103から出力されるピーク信号の相対速度vselect(n)を入力とし、n(n=1,2,…,N)番目のピーク信号に対する移動距離ΔRselect(n)(n=1,2,…,N)を式(4)より算出し、移動距離ΔRselect(n)(n=1,2,…,N)に相当する位相変化量を式(5)より算出する。
実施の形態2は、相対速度を高精度に計測するようにしたものである。
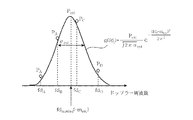
図3において、Δ/Σ相対速度計測手段110は、実施の形態1における選択信号相対速度計測手段103に置き換えて設けたもので、ピーク信号選択手段102で選択したピーク信号の発生周波数に近接する最も強度の大きい2信号の振幅値の差(Δ)を、その2信号の和(Σ)で割った値をΔ/Σ値として生成し、このΔ/Σ値と、予め求めたΔ/Σ値と周波数補正量との関係に基づいて、生成したΔ/Σ値に相当する周波数補正量を算出し、その周波数補正量で補正した周波数を前記ピーク信号の真の発生周波数として、この周波数に相当する相対速度を求める機能を有している。これ以外の構成は、実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
Δ/Σ相対速度計測手段110、もしくは重心相対速度計測手段111、もしくは非線形最小二乗相対速度計測手段112は、ピーク信号選択手段102により選択されたピーク信号を入力とし、ピーク信号及びその周囲の信号の情報を利用し、Δ/Σ処理、もしくは重心演算処理、もしくは非線形最小二乗処理等を行うことで、FFT分解能以上の精度でピーク信号の相対速度を計測する。これらのΔ/Σ相対速度計測手段110、重心相対速度計測手段111および非線形最小二乗相対速度計測手段112以外の処理については実施の形態1と同様の動作であるため、ここでの説明は省略する。
fdΔ/Σ=fdB+fdcomp (12)
図9は、本発明の実施の形態3によるレーダ装置の構成図である。
図9において、閾値判定手段113、ゲート設定手段114およびゲート内信号選択手段115以外の構成については、実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。閾値判定手段113は、周波数スペクトル計算手段101の出力である周波数スペクトルに対して閾値を設定し、この閾値を超えた全ての信号を目標信号の候補として仮検出する機能を有している。ゲート設定手段114は、閾値判定手段113で仮検出された各目標信号の候補毎にそれらの情報を利用し、次のCPI間隔に得られる周波数スペクトルに対して仮検出される可能性の高い領域にゲートを設定する機能を有している。ゲート内信号選択手段115は、ゲート設定手段114で設定されたゲート内で周波数スペクトルの強度が最大となるピーク信号を検出する機能を有している。
閾値判定手段113は、周波数スペクトル計算手段101から式(1)で表されるCPI毎に入力される周波数スペクトルXk(n)(n=1,2,…,N)に対し閾値を設定し、式(16)の関係を満たす信号を目標信号の候補として仮検出する。
Xk(n)>Th,(n=1,2,…,N)(k=1,2,…,M) (16)
ここで、k(k=1,2,…,M)は周波数ビン番号、n(n=1,2,…,N)はCPI番号を表し、M、NはそれぞれFFTポイント数およびCPI処理回数を表す。また、Thは予め設定される閾値レベルを表す。
上記以外の処理については、実施の形態1と同様の動作を有するため説明は省略する。
また、ここでは、実施の形態1に適用した場合を示したが、実施の形態2に適用しても同様の効果が得られる。
図11は、この発明の実施の形態4によるレーダ装置を示す構成図である。
図11において、初期目標ビン選択手段119は、目標の存在する周波数ビンを外部からの情報により予め選択する機能を有している。位相初期値算出手段120は、初期目標ビン選択手段119の出力である予め選択された周波数ビンの信号の位相を1番目のCPIに対する目標信号の位相初期値として算出する機能を有している。位相差算出手段121は、後述する選択信号位相補償手段123の出力であるCPI毎の周波数スペクトルの全周波数ビンの信号に対する補償後の位相と、位相初期値算出手段120の出力である位相初期値との位相差を算出する機能を有している。
これ以外の構成は、実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
初期目標ビン選択手段119は、1番目のCPIの周波数スペクトルに対してのみ、目標の存在する周波数ビンの信号を他のレーダ装置等の外部からの情報により選択する。位相初期値算出手段120は、1番目のCPIで周波数スペクトル計算手段101の出力として得られる周波数スペクトルから初期目標ビン選択手段119の出力として得られる1番目のCPIに対する目標の存在する周波数ビンの信号Xinitial(1)を求め、1番目のCPIに対する目標信号の位相初期値φinitial(1)を式(17)より算出する。
但し、1番目のCPIに対しては、1番目のCPIに対する目標の信号Xinitial(1)を選択(Xselect(1)=Xinitial(1))する。
尚、1番目のCPIに対しては位相初期値φinitial(1)を入力する。
ここで、2番目以降のCPIに対して、周波数スペクトル計算手段101からCPI毎に出力される周波数スペクトルXk(n’)(n’=2,…,N)の位相φk(n’)は式(20)で表される。
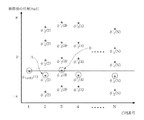
尚、ここでは、FFTポイント数Mが5個、すなわち、スペクトルの全周波数ビン数Mが5個の場合を例として説明する。図12は横軸をCPI番号、縦軸を補償後の位相として、各周波数ビンの補償後の位相をCPI毎にプロットしたものである。
図12に示すように、先ず、1番目のCPIについては、初期目標ビン選択手段119の出力として得られる1番目のCPIに対する目標の存在する周波数ビンの信号Xinitial(1)が選択されるので、位相初期値はφinitial(1)となる。次に、2番目以降のCPIについては、1CPI前までに選択された仮目標信号の情報を元に目標の移動に伴う位相変化を各周波数ビンに対して位相補償し、M個の補償後の位相の中で位相初期値に最も近い信号、すなわち、位相初期値との位相差が最小となる信号を仮目標信号として選択する。
図13は、本発明の実施の形態5によるレーダ装置の構成図である。
図13において、信号強度比較手段124以外の構成については実施の形態4と同様であるため、対応する部分に同一符号を付してその説明を省略する。信号強度比較手段124は、CPI毎に入力される周波数スペクトルに対し、閾値処理等によって、信号強度が閾値よりも大きな信号を仮目標信号の候補として選択し、位相初期値算出手段120、選択信号位相補償手段123および振幅算出手段140へ出力する機能を有している。
図14は、本発明の実施の形態6によるレーダ装置の構成図である。
図14において、信号再選択手段125以外の構成については実施の形態4と同様であるため、対応する部分に同一符号を付してその説明を省略する。信号再選択手段125は、位相差最小信号選択手段122において選択された信号の位相差φ’dif_min(n)が式(21)を満たさなかった場合、過去に選択された仮目標信号が誤りであったと判断し、仮目標信号を再度選択し直す機能を有している。仮目標信号を再選択する方法としては、例えば、前回選択された仮目標信号の次に補償後の位相差が小さな信号を選ぶ等の処理を実施し、式(21)の関係を満足するまで信号を選び直す。
図18は、本発明の実施の形態7によるレーダ装置の構成図である。
図18において、ゲート設定手段130、ゲート内位相差算出手段131以外の構成については実施の形態4と同様であるため、対応する部分に同一符号を付してその説明を省略する。
図20は、本発明の実施の形態8によるレーダ装置の構成図である。
図20において、コヒーレント積分手段116以外の構成については実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。即ち、実施の形態8は、実施の形態1における積分手段108の代わりにコヒーレント積分手段116を設けたものである。このコヒーレント積分手段116は、信号再構成手段107でCPI毎に生成される複数の位相補償されたピーク信号をコヒーレントに積分する機能を有している。即ち、積分手段108における積分処理が、選択信号位相補償手段105において完全に誤差なく位相補償されているものとして単純に加算するのに対して、コヒーレント積分手段116における積分処理は、選択信号位相補償手段105において位相補償誤差が存在する場合にもその誤差を再度位相補償しながら積分するものである。また、閾値検出手段109は、このコヒーレント積分手段116の出力に対して目標の有無を判定するよう構成されている。
図21は、実施の形態8の動作を示す説明図である。
コヒーレント積分手段116は、信号再構成手段107の出力である式(9)で表される位相補償されたN個のピーク信号hselect(n)(n=1,2,…,N)を、例えば式(23)で示されるようなFFT処理等によってコヒーレントな積分を実施する。
コヒーレント積分手段116以外の処理については上記実施の形態1と同様の動作を有するため説明は省略する。
図21に示すように、目標が等速運動する条件では、FFT分解能の制限による相対速度計測誤差はCPI毎に得られるピーク信号に対して常に一定の値をとる。即ち、FFTの周波数分解能の制限により、出力できる値は離散的な値でしかないため、図21に示すように真値と計測値との間には周波数計測誤差(相対速度計測誤差)が存在することになる。そして、この誤差は、目標が等速運動する条件では、CPI毎に得られるピーク信号に対して常に一定の値となる。
図23は、本発明の実施の形態9によるレーダ装置の構成図である。
図23において、FFTポイント数設定手段117以外の構成については実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
実施の形態9では、周波数スペクトル計算手段101がFFT処理を実施することを想定し、FFTポイント数設定手段117は、そのFFTポイント数を予め設定する機能を有するものである。即ち、実施の形態8では誤差を補償するよう構成したのに対して、実施の形態9では誤差そのものを小さくするよう構成したものである。
先ず、パルスヒット毎に得られる信号のサンプル番号をm’とし、A/D変換後の受信ビデオ信号をU(m’)とおく。
FFTポイント数設定手段117は、CPIをL個のA/D変換後の受信ビデオ信号の観測時間とした場合、式(24)に示すように、FFTポイント数Mが2のべき乗で、かつ、Lより大きくなるように設定する。
M=2aかつM>L (24)
但し、aは1以上の整数とする。
尚、式(25)において、受信信号U(m’)のデータ数LはFFTポイント数M(M=2aかつM>L)より小さいため、受信信号U(m’)のデータ数がM(M=2aかつM>L)になるまで受信信号の後ろに0を加える。
FFTポイント数設定手段117以外の処理については上記実施の形態1と同様の動作を有するため説明は省略する。
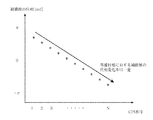
図24に示すように、FFTポイント数Mが2a、2a+1、2a+2と増加するにつれて、FFTの周波数分解能は向上する。即ち、FFTポイント数Mを増やすことにより相対速度計測精度を改善することが可能となる。従って、相対速度計測精度の改善により、位相補償精度も改善されるので、検出性能の改善が期待できる。
図25は、本発明の実施の形態10によるレーダ装置の構成図である。
図25において、処理データ設定手段118以外の構成については実施の形態1と同様であるため、対応する部分に同一符号を付してその説明を省略する。
処理データ設定手段118は、入力される受信信号に対し、それぞれデータ取得間隔だけずれたCPIの長さをもつN個の受信信号を出力する機能を有するものである。また、周波数スペクトル計算手段101は、上記データ取得間隔だけずれたCPIの長さをもつN個の受信信号をFFT処理し、周波数スペクトルを求めるよう構成されている。
処理データ設定手段118は、A/D変換後の受信ビデオ信号を入力とし、入力される受信信号に対し、それぞれデータ取得間隔だけずれたCPIの長さをもつN個の受信信号を周波数スペクトル計算手段101に出力する。
つまり、実施の形態1では、図26に示すように、CPI毎に入力されるCPIの長さをもつN個の受信信号に対して周波数スペクトルを求めるため、受信信号の観測には式(26)で表される時間Tobs_Aを必要とする。
Tobs_A=CPI・N (26)
ここで、CPIはコヒーレント処理可能な時間、NはCPI処理回数を表す。
Tobs_B=CPI+ΔT・(N−1) (27)
処理データ設定手段118以外の処理については上記実施の形態1と同様の動作を有するため説明は省略する。
また、ここでは、実施の形態1に対して適用した例を示したが、実施の形態2〜9に適用しても同様の効果が得られる。
Claims (12)
- コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
前記周波数スペクトルの強度が最大となるピーク信号を選択するピーク信号選択手段と、
前記ピーク信号の発生周波数に相当する相対速度を計測する選択信号相対速度計測手段と、
計測された前記相対速度に基づいて前記CPI毎の位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて前記ピーク信号の位相を補償する選択信号位相補償手段と、
前記ピーク信号の振幅値を算出する振幅算出手段と、
前記選択信号位相補償手段の出力である前記ピーク信号の補償後の位相と前記振幅算出手段の出力である前記ピーク信号の振幅値とから位相補償されたピーク信号を再構成する信号再構成手段と、
前記CPI毎に生成される複数の前記位相補償されたピーク信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
前記周波数スペクトルの強度が最大となるピーク信号を選択するピーク信号選択手段と、
前記ピーク信号の発生周波数に近接する最も強度の大きい2信号の振幅値の差(Δ)を当該2信号の和(Σ)で割った値をΔ/Σ値として生成し、当該Δ/Σ値と、予め求めたΔ/Σ値と周波数補正量との関係に基づいて、前記生成したΔ/Σ値に相当する周波数補正量を算出し、当該周波数補正量で補正した周波数を前記ピーク信号の真の発生周波数として、この周波数に相当する相対速度を求めるΔ/Σ相対速度計測手段と、
前記相対速度に基づいて前記CPI毎の位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて前記ピーク信号の位相を補償する選択信号位相補償手段と、
前記ピーク信号の振幅値を算出する振幅算出手段と、
前記選択信号位相補償手段の出力である前記ピーク信号の補償後の位相と前記振幅算出手段の出力である前記ピーク信号の振幅値とから位相補償されたピーク信号を再構成する信号再構成手段と、
前記CPI毎に生成される複数の前記位相補償されたピーク信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
前記周波数スペクトルの強度が最大となるピーク信号を選択するピーク信号選択手段と、
前記ピーク信号の発生周波数に近接する複数の信号の重心を求め、当該重心の周波数を前記ピーク信号の真の発生周波数として、この周波数に相当する相対速度を算出する重心相対速度計測手段と、
前記相対速度に基づいて前記CPI毎の位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて前記ピーク信号の位相を補償する選択信号位相補償手段と、
前記ピーク信号の振幅値を算出する振幅算出手段と、
前記選択信号位相補償手段の出力である前記ピーク信号の補償後の位相と前記振幅算出手段の出力である前記ピーク信号の振幅値とから位相補償されたピーク信号を再構成する信号再構成手段と、
前記CPI毎に生成される複数の前記位相補償されたピーク信号を加算する積分手段と、前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
前記周波数スペクトルの強度が最大となるピーク信号を選択するピーク信号選択手段と、
前記ピーク信号の発生周波数に近接する複数の信号を用いて非線形最小二乗処理を行い、強度が最大となる周波数を前記ピーク信号の真の発生周波数として、この周波数に相当する相対速度を算出する非線形最小二乗相対速度計測手段と、
前記相対速度に基づいて前記CPI毎の位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて前記ピーク信号の位相を補償する選択信号位相補償手段と、
前記ピーク信号の振幅値を算出する振幅算出手段と、
前記選択信号位相補償手段の出力である前記ピーク信号の補償後の位相と前記振幅算出手段の出力である前記ピーク信号の振幅値とから位相補償されたピーク信号を再構成する信号再構成手段と、
前記CPI毎に生成される複数の前記位相補償されたピーク信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - 周波数スペクトル計算手段の出力である周波数スペクトルに対し閾値を設定し、閾値を超えた全ての信号を目標信号の候補として仮検出する閾値判定手段と、
仮検出された前記各目標信号の候補毎にそれらの情報を利用し、次のCPIに得られる周波数スペクトルに対して仮検出される可能性の高い領域にゲートを設定するゲート設定手段と、
ピーク信号選択手段に代えて、各前記ゲート内で周波数スペクトルの強度が最大となるピーク信号を選択するゲート内ピーク信号選択手段を備えたことを特徴とする請求項1から請求項4のうちのいずれか1項記載のレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
目標の存在する周波数ビンを外部からの情報により予め選択する初期周波数ビン選択手段と、
前記周波数スペクトル計算手段より出力される1番目のCPIの周波数スペクトルの中の前記選択された周波数ビンの信号の位相を1番目のCPIに対する目標信号の位相初期値として算出する位相初期値算出手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の補償後の位相と前記位相初期値との位相差を算出する位相差算出手段と、
全周波数ビンの信号に対して算出された前記位相差のうち、位相差が最小となる信号を位相差最小信号として選択する位相差最小信号選択手段と、
選択された前記位相差最小信号の発生周波数に相当する相対速度を計測する選択信号相対速度計測手段と、
計測された前記相対速度に基づいて前記位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて、前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の位相を補償する選択信号位相補償手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の中から前記位相差最小信号の周波数ビンの信号の振幅値を前記位相差最小信号の振幅値として算出する振幅算出手段と、
前記位相差最小信号選択手段の出力である前記位相差最小信号の補償後の位相と前記振幅算出手段の出力である前記位相差最小信号の振幅値とから位相補償された位相差最小信号を再構成する信号再構成手段と、
CPI毎に生成される複数の前記位相補償された位相差最小信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
目標の存在する周波数ビンを外部からの情報により予め選択する初期周波数ビン選択手段と、
前記周波数スペクトル計算手段より出力される1番目のCPIの周波数スペクトルの中の前記選択された周波数ビンの信号の位相を1番目のCPIに対する目標信号の位相初期値として算出する位相初期値算出手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルに対し、信号強度が閾値よりも大きな複数の信号を仮目標信号の候補として選択する信号強度比較手段と、
前記信号強度が閾値よりも大きな複数の信号の補償後の位相と前記位相初期値との位相差を算出する位相差算出手段と、
前記信号強度が閾値よりも大きな複数の信号に対して算出された前記位相差のうち、位相差が最小となる信号を位相差最小信号として選択する位相差最小信号選択手段と、
選択された前記位相差最小信号の発生周波数に相当する相対速度を計測する選択信号相対速度計測手段と、
計測された前記相対速度に基づいて位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて、前記信号強度比較手段より出力される前記信号強度が閾値よりも大きな複数の信号の位相を補償する選択信号位相補償手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の中から前記位相差最小信号の周波数ビンの信号の振幅値を前記位相差最小信号の振幅値として算出する振幅算出手段
前記位相差最小信号選択手段の出力である前記位相差最小信号の補償後の位相と前記振幅算出手段の出力である前記位相差最小信号の振幅値とから位相補償された位相差最小信号を再構成する信号再構成手段と、
CPI毎に生成される複数の前記位相補償された位相差最小信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - コヒーレント処理が可能な時間間隔(CPI)毎に入力された受信信号の周波数スペクトルを求める周波数スペクトル計算手段と、
目標の存在する周波数ビンを外部からの情報により予め選択する初期周波数ビン選択手段と、
前記周波数スペクトル計算手段より出力される1番目のCPIの周波数スペクトルの中の前記選択された周波数ビンの信号の位相を1番目のCPIに対する目標信号の位相初期値として算出する位相初期値算出手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の補償後の位相と前記位相初期値との位相差を算出する位相差算出手段と、
全周波数ビンの信号に対して算出された前記位相差のうち、位相差が最小となる信号を位相差最小信号として選択する位相差最小信号選択手段と、
過去のCPIにおいて選択された前記位相差最小信号が誤りであると判断した場合に、前記位相差最小信号を再度選択し直す信号再選択手段と、
選択された前記位相差最小信号の発生周波数に相当する相対速度を計測する選択信号相対速度計測手段と、
計測された前記相対速度に基づいて前記位相変化量を算出する選択信号位相変化量算出手段と、
前記位相変化量を用いて、前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の位相を補償する選択信号位相補償手段と、
前記周波数スペクトル計算手段より出力される周波数スペクトルの全周波数ビンの信号の中から前記位相差最小信号の周波数ビンの信号の振幅値を前記位相差最小信号の振幅値として算出する振幅算出手段と、
前記位相差最小信号選択手段の出力である前記位相差最小信号の補償後の位相と前記振幅算出手段の出力である前記位相差最小信号の振幅値とから位相補償された位相差最小信号を再構成する信号再構成手段と、
CPI毎に生成される複数の前記位相補償された位相差最小信号を加算する積分手段と、
前記積分手段の出力信号に対して目標の有無を判定する閾値検出手段とを備えたことを特徴とするレーダ装置。 - 位相差最小信号選択手段の出力である位相差最小信号の周波数ビンの情報を利用し、次のCPIに得られる周波数スペクトルに対してゲートを設定するゲート設定手段と、
位相差算出手段に代えて、各前記ゲート内で補償後の位相と位相初期値との位相差を算出するゲート内位相差算出手段を備えたことを特徴とする請求項6から請求項8のうちのいずれか1項記載のレーダ装置。 - 積分手段に代えて、信号再構成手段でCPI毎に生成される複数の位相補償されたピーク信号もしくは位相差最小信号に対してコヒーレントに積分するコヒーレント積分手段を備え、閾値検出手段は、前記コヒーレント積分手段の出力信号に対して目標の有無を判定することを特徴とする請求項1から請求項9のうちのいずれか1項記載のレーダ装置。
- 高速フーリエ変換処理のポイント数を予め設定するFFTポイント数設定手段を備え、周波数スペクトル計算手段は、前記FFTポイント数設定手段により設定された高速フーリエ変換処理のポイント数に従ってCPI毎に入力される受信信号を高速フーリエ変換処理し、周波数スペクトルを求めることを特徴とする請求項1から請求項10のうちのいずれか1項記載のレーダ装置。
- 入力される受信信号に対し、それぞれデータ取得間隔だけずれたCPIの長さを有する受信信号を、所定の観測を行うための個数を単位として、周波数スペクトル計算手段に出力する処理データ設定手段を備えたことを特徴とする請求項1から請求項11のうちのいずれか1項記載のレーダ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005197904A JP4602179B2 (ja) | 2005-02-15 | 2005-07-06 | レーダ装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005037838 | 2005-02-15 | ||
| JP2005197904A JP4602179B2 (ja) | 2005-02-15 | 2005-07-06 | レーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006258786A JP2006258786A (ja) | 2006-09-28 |
| JP4602179B2 true JP4602179B2 (ja) | 2010-12-22 |
Family
ID=37098196
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005197904A Expired - Fee Related JP4602179B2 (ja) | 2005-02-15 | 2005-07-06 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4602179B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4912762B2 (ja) * | 2006-06-14 | 2012-04-11 | 三菱電機株式会社 | 目標検出装置 |
| JP4937782B2 (ja) * | 2007-02-19 | 2012-05-23 | 三菱電機株式会社 | レーダ装置 |
| JP5036392B2 (ja) * | 2007-04-25 | 2012-09-26 | 三菱電機株式会社 | 目標検出装置 |
| JP2009156807A (ja) * | 2007-12-27 | 2009-07-16 | Toshiba Corp | 測角装置 |
| JP5422140B2 (ja) * | 2008-04-24 | 2014-02-19 | 株式会社東芝 | 目標検出装置 |
| EP2677343B1 (en) | 2011-02-18 | 2021-03-24 | Mitsubishi Electric Corporation | Passive radar device |
| JP5578683B2 (ja) * | 2011-10-03 | 2014-08-27 | 公立大学法人首都大学東京 | 身体情報測定装置及び身体情報測定方法 |
| JP5865794B2 (ja) * | 2012-07-13 | 2016-02-17 | 三菱電機株式会社 | レーダ装置 |
| KR101348548B1 (ko) * | 2012-11-09 | 2014-01-16 | 재단법인대구경북과학기술원 | 레이더 간섭 제거 장치 및 그 방법 |
| JP6207376B2 (ja) * | 2013-12-17 | 2017-10-04 | 三菱電機株式会社 | 目標検出装置 |
| JP6410445B2 (ja) * | 2014-03-28 | 2018-10-24 | 三菱電機株式会社 | レーダ装置 |
| CN112068117B (zh) * | 2020-09-11 | 2023-11-03 | 上海航天电子通讯设备研究所 | 基于pd检测的精确测速修正方法及系统 |
| CN113030871B (zh) * | 2021-03-18 | 2023-05-16 | 中国电子科技集团公司第三十八研究所 | 适用于火星次表层探测雷达的高低频回波交替处理方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0351388U (ja) * | 1989-09-27 | 1991-05-20 | ||
| JPH0445983U (ja) * | 1990-08-22 | 1992-04-20 | ||
| JP2005326297A (ja) * | 2004-05-14 | 2005-11-24 | Mitsubishi Electric Corp | レーダ装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03128478A (ja) * | 1989-10-13 | 1991-05-31 | Mitsubishi Electric Corp | レーダの積分回路 |
| JPH03218486A (ja) * | 1989-11-30 | 1991-09-26 | Mitsubishi Electric Corp | パルスドツプラーレーダー装置 |
| JP2737434B2 (ja) * | 1991-03-29 | 1998-04-08 | 三菱電機株式会社 | パルスドップラ−レ−ダ装置 |
| JPH06294864A (ja) * | 1993-04-08 | 1994-10-21 | Mitsubishi Electric Corp | レーダ装置 |
-
2005
- 2005-07-06 JP JP2005197904A patent/JP4602179B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0351388U (ja) * | 1989-09-27 | 1991-05-20 | ||
| JPH0445983U (ja) * | 1990-08-22 | 1992-04-20 | ||
| JP2005326297A (ja) * | 2004-05-14 | 2005-11-24 | Mitsubishi Electric Corp | レーダ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006258786A (ja) | 2006-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4602179B2 (ja) | レーダ装置 | |
| JP5709476B2 (ja) | レーダ装置 | |
| JP2011127910A (ja) | レーダ装置及びレーダシステム | |
| JP6279193B2 (ja) | 物体検出装置及びセンサ装置 | |
| JPWO2006013614A1 (ja) | レーダ装置 | |
| AU2015295795B2 (en) | Method and apparatus for detecting a speed and a distance of at least one object with respect to a receiver of a reception signal | |
| US9753120B2 (en) | Method to “zoom into” specific objects of interest in a radar | |
| JP2006275828A (ja) | レーダ装置 | |
| JP2009139321A (ja) | レーダ信号処理装置および方法 | |
| JP2010014488A (ja) | Fmcwレーダ装置用信号処理装置、fmcwレーダ装置用信号処理方法、fmcwレーダ装置 | |
| JP2010286404A (ja) | 移動目標検出装置 | |
| US7312745B2 (en) | Radar | |
| JP3720662B2 (ja) | 車載用レーダ装置 | |
| US6788247B2 (en) | Distance/velocity measuring method and radar signal processing device | |
| JP4429102B2 (ja) | レーダ装置およびレーダ信号処理方法 | |
| JP5508877B2 (ja) | レーダ装置 | |
| JP5925264B2 (ja) | レーダ装置 | |
| JP2009085743A (ja) | 目標検出装置 | |
| JP5132338B2 (ja) | レーダ装置 | |
| JP2021099244A (ja) | レーダ装置及びそのレーダ信号処理方法 | |
| JP2014153088A (ja) | レーダ装置および追尾処理装置 | |
| JP4754981B2 (ja) | パルスレーダ装置 | |
| JP6763169B2 (ja) | Fm−cwレーダ装置およびfm−cwレーダ方法 | |
| JP4867190B2 (ja) | レーダ装置及び測角方法 | |
| KR101877216B1 (ko) | 표적 탐지 장치의 위상오차 보상장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20071005 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080609 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20080624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100921 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100929 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131008 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4602179 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |