JP4560342B2 - 高所作業車の安全装置 - Google Patents
高所作業車の安全装置 Download PDFInfo
- Publication number
- JP4560342B2 JP4560342B2 JP2004202570A JP2004202570A JP4560342B2 JP 4560342 B2 JP4560342 B2 JP 4560342B2 JP 2004202570 A JP2004202570 A JP 2004202570A JP 2004202570 A JP2004202570 A JP 2004202570A JP 4560342 B2 JP4560342 B2 JP 4560342B2
- Authority
- JP
- Japan
- Prior art keywords
- jack
- state
- outrigger
- work table
- worker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Forklifts And Lifting Vehicles (AREA)
Description
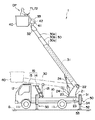
10 走行体
16 ステップ
17 フック係止金具(安全索係止手段)
17a フック係止金具の孔
30 ブーム
40 作業台
45 作業台積載荷重検出器(作業者搭乗検出手段、作業台積載荷重検出手段)
50 アウトリガジャッキ
55 ジャッキ格納検出器
56 ジャッキ接地検出器(接地検出手段)
60 コントローラ
62 ジャッキ作動制御部(ジャッキ作動制御手段、第1の警報手段、第2の警報手段)
63 規制部(第1の規制手段、第2の規制手段)
64 判断部(作業者搭乗検出手段、判断手段)
73 ジャッキ操作レバー(ジャッキ操作手段)
83 ステップ足掛け検出器(ステップ足掛け検出手段)
84 走行可能状態検出器(走行可能状態検出手段)
101 警報装置(第1の警報手段、第2の警報手段)
Claims (8)
- 走行体と、
前記走行体上に起伏、伸縮、旋回動自在に設けられたブームと、
前記ブームの先端部に取り付けられた作業台と、
前記走行体の複数箇所に設けられ、下方に張り出して前記走行体を安定的に支持するアウトリガジャッキと、
前記アウトリガジャッキの操作入力を行うジャッキ操作手段と、
前記ジャッキ操作手段の操作入力に応じて前記各アウトリガジャッキを作動させるジャッキ作動制御手段と、
前記作業台に作業者が搭乗しているか否かの検出を行う作業者搭乗検出手段と、
前記ブームが格納位置に格納されている状態において、前記作業者搭乗検出手段により前記作業台に作業者が搭乗していることが検出されているとき、前記ジャッキ作動制御手段が行う前記各アウトリガジャッキの作動を規制する第1の規制手段とを備えたことを特徴とする高所作業車の安全装置。 - 前記作業者搭乗検出手段は、前記作業台の積載荷重を検出する作業台積載荷重検出手段と、前記作業台積載荷重検出手段により検出された前記作業台の積載荷重が予め定めた所定値を超えているか否かに基づいて前記作業台に作業者が搭乗しているか否かの判断を行う判断手段とからなることを特徴とする請求項1記載の高所作業車の安全装置。
- 前記作業者搭乗検出手段は、前記作業台に搭乗した作業者自身に取り付けられた安全索と、前記安全索が前記作業台に備えられた安全索係止手段に係止されているか否かを検出する安全索係止検出手段とからなることを特徴とする請求項1記載の高所作業車の安全装置。
- 前記各アウトリガジャッキが接地状態にあるか否かを検出する接地検出手段と、前記接地検出手段により前記複数のアウトリガジャッキの少なくとも1つが非接地状態にあることが検出されている状態において、前記作業者搭乗検出手段により前記作業台に作業者が搭乗したことが検出されたときに警報作動を行う第1の警報手段とを備えたことを特徴とする請求項1〜3のいずれかに記載の高所作業車の安全装置。
- 前記走行体が走行可能な状態にあるか否かを検出する走行可能状態検出手段と、前記走行可能状態検出手段により前記走行体が走行可能な状態にあることが検出されている状態において、前記作業者搭乗検出手段により前記作業台に作業者が搭乗したことが検出されたときに警報作動を行う第2の警報手段とを備えたことを特徴とする請求項1〜4のいずれかに記載の高所作業車の安全装置。
- 走行体と、
前記走行体上に起伏、伸縮、旋回動自在に設けられたブームと、
前記ブームの先端部に取り付けられた作業台と、
前記走行体の複数箇所に設けられ、下方に張り出して前記走行体を安定的に支持するアウトリガジャッキと、
前記各アウトリガジャッキの操作入力を行うジャッキ操作手段と、
前記ジャッキ操作手段の操作入力に応じて前記各アウトリガジャッキを作動させるジャッキ作動制御手段と、
作業者が前記作業台に搭乗するためのステップと、
作業者が前記ステップを使用しているか否かの検出を行うステップ使用検出手段と、
前記ブームが格納位置に格納されている状態において、前記ステップ使用検出手段により作業者が前記ステップを使用していることが検出されているとき、前記ジャッキ作動制御手段が行う前記各アウトリガジャッキの作動を規制する第2の規制手段とを備えたことを特徴とする高所作業車の安全装置。 - 前記各アウトリガジャッキが接地状態にあるか否かを検出する接地検出手段と、前記接地検出手段により前記複数のアウトリガジャッキの少なくとも1つが非接地状態にあることが検出されている状態において、前記ステップ使用検出手段により作業者が前記ステップを使用している状態が検出されたときに警報作動を行う第3の警報手段とを備えたことを特徴とする請求項6記載の高所作業車の安全装置。
- 前記走行体が走行可能な状態にあるか否かを検出する走行可能状態検出手段と、前記走行可能状態検出手段により前記走行体が走行可能な状態にあることが検出されている状態において、前記ステップ使用検出手段により作業者が前記ステップを使用していることが検出されたときに警報作動を行う第4の警報手段とを備えたことを特徴とする請求項6もしくは7に記載の高所作業車の安全装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004202570A JP4560342B2 (ja) | 2004-07-09 | 2004-07-09 | 高所作業車の安全装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004202570A JP4560342B2 (ja) | 2004-07-09 | 2004-07-09 | 高所作業車の安全装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006021897A JP2006021897A (ja) | 2006-01-26 |
| JP2006021897A5 JP2006021897A5 (ja) | 2006-12-28 |
| JP4560342B2 true JP4560342B2 (ja) | 2010-10-13 |
Family
ID=35795452
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004202570A Expired - Fee Related JP4560342B2 (ja) | 2004-07-09 | 2004-07-09 | 高所作業車の安全装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4560342B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006151628A (ja) * | 2004-11-30 | 2006-06-15 | Aichi Corp | 高所作業車の制御装置 |
| JP5481799B2 (ja) * | 2008-04-01 | 2014-04-23 | 株式会社豊田自動織機 | 自動倉庫 |
| KR101643906B1 (ko) * | 2016-01-20 | 2016-07-29 | 주식회사 광림 | 인터록을 구비하는 고소작업차의 탑승안전 시스템 및 그 제어방법 |
| JP7484559B2 (ja) | 2020-08-19 | 2024-05-16 | 株式会社タダノ | 作業車操作システム、作業車の操作方法及びプログラム |
| KR102224284B1 (ko) * | 2020-12-18 | 2021-03-08 | 주식회사 대양계기 | 고소작업대 안전 보조 장치 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01118998U (ja) * | 1988-01-31 | 1989-08-11 | ||
| JPH0362098U (ja) * | 1989-10-19 | 1991-06-18 | ||
| JPH0414298U (ja) * | 1990-05-24 | 1992-02-05 | ||
| JPH0639898U (ja) * | 1992-10-30 | 1994-05-27 | 株式会社タダノ | 高所作業車の安全装置 |
| JPH0649499U (ja) * | 1992-12-18 | 1994-07-08 | 株式会社アイチコーポレーション | 作業車の支持状態表示装置 |
| JP2003285998A (ja) * | 2002-03-28 | 2003-10-07 | Aichi Corp | 高所作業車の安全装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3068531B2 (ja) * | 1997-09-26 | 2000-07-24 | 株式会社アイチコーポレーション | 高所作業車の安全装置 |
-
2004
- 2004-07-09 JP JP2004202570A patent/JP4560342B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01118998U (ja) * | 1988-01-31 | 1989-08-11 | ||
| JPH0362098U (ja) * | 1989-10-19 | 1991-06-18 | ||
| JPH0414298U (ja) * | 1990-05-24 | 1992-02-05 | ||
| JPH0639898U (ja) * | 1992-10-30 | 1994-05-27 | 株式会社タダノ | 高所作業車の安全装置 |
| JPH0649499U (ja) * | 1992-12-18 | 1994-07-08 | 株式会社アイチコーポレーション | 作業車の支持状態表示装置 |
| JP2003285998A (ja) * | 2002-03-28 | 2003-10-07 | Aichi Corp | 高所作業車の安全装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006021897A (ja) | 2006-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4560342B2 (ja) | 高所作業車の安全装置 | |
| JP4388738B2 (ja) | 高所作業車のブーム作動制御装置 | |
| JP4854318B2 (ja) | 高所作業車 | |
| JP4658463B2 (ja) | 高所作業車の制御装置 | |
| JP2007297151A (ja) | 高所作業車 | |
| JP3712558B2 (ja) | ブーム式作業車の安全装置 | |
| JP2002046998A (ja) | ブーム作業車の車体傾斜角検出装置 | |
| JP4288106B2 (ja) | 高所作業車の安全装置 | |
| JP4528688B2 (ja) | 作業用車両 | |
| JP4878767B2 (ja) | 高所作業車 | |
| JP4991132B2 (ja) | 作業車の安全装置 | |
| JP4847025B2 (ja) | 高所作業車 | |
| JP2009035387A (ja) | 作業車の安全装置 | |
| JP2006036525A (ja) | ブーム作業車の安全装置 | |
| JP2003128393A (ja) | 高所作業車 | |
| JP2013216428A (ja) | 高所作業車 | |
| JP2012030943A (ja) | 高所作業車 | |
| JP3886093B2 (ja) | ブーム作業車の安全装置 | |
| JP2010260698A (ja) | ブーム作業車の作動制御装置 | |
| JP2006160502A (ja) | 作業車の安全制御装置 | |
| JP2006168925A (ja) | 作業車の安全制御装置 | |
| JP2023009349A (ja) | 輪止め装置 | |
| JP2014151991A (ja) | 高所作業車 | |
| JP2007099434A (ja) | 作業車のブーム自動格納装置 | |
| JP2008143606A (ja) | 作業車の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061114 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090729 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091225 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100702 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100726 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130730 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |