JP2013216428A - 高所作業車 - Google Patents
高所作業車 Download PDFInfo
- Publication number
- JP2013216428A JP2013216428A JP2012087447A JP2012087447A JP2013216428A JP 2013216428 A JP2013216428 A JP 2013216428A JP 2012087447 A JP2012087447 A JP 2012087447A JP 2012087447 A JP2012087447 A JP 2012087447A JP 2013216428 A JP2013216428 A JP 2013216428A
- Authority
- JP
- Japan
- Prior art keywords
- boom
- work table
- storage
- work
- stored
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Abstract
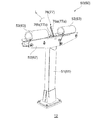
【解決手段】高所作業車1は、ブーム30と、作業台40と、作業台40の昇降作動を制御するコントロールユニットと、格納されたブーム30を支持するブーム受け50と、格納された作業台40を支持する作業台受け60と、ブーム30の格納を検出するブーム格納検出器と、作業台40の格納を検出する作業台格納検出器とを有し、コントロールユニットは、作業台40を最も降下させた最降下位置から、格納上下位置を超えて作業台格納準備位置に位置させるように作業台40を上昇させる制御を行いながらブーム30を倒伏させ、ブーム30の格納が検出されることに応じてブーム30の倒伏を停止させるとともに作業台40を降下させ、作業台40の格納が検出されたときに作業台40の降下作動を停止させる。
【選択図】図1
Description
10 車体
30 ブーム
40 作業台
42 操作レバー(起伏操作手段)
43 作業台自動格納スイッチ(自動格納操作装置)
50 ブーム受け(ブーム支持手段)
60 作業台受け(作業台支持手段)
71 旋回角度検出器(旋回角検出手段)
72 起伏角度検出器(起伏角検出手段)
73 伸長量検出器(伸縮状態検出手段)
76 ブーム格納検出器(ブーム格納検出手段)
77 作業台格納検出器(作業台格納検出手段)
80 コントロールユニット(昇降作動制御手段)
Claims (7)
- 車体に起伏動等が自在に設けられ、前記車体上に倒伏されて格納されるブームと、
前記ブームの先端部に上下方向に昇降動自在に設けられ、前記ブームが格納された状態で前記車体上に格納される作業台と、
前記作業台の昇降作動を制御する昇降作動制御手段と、
前記車体に設けられ、前記車体上に格納された前記ブームを載置させて支持するブーム支持手段と、
前記車体に設けられ、前記車体上に格納された前記作業台を載置させて支持する作業台支持手段と、
前記ブーム支持手段への前記ブームの格納を検出するブーム格納検出手段と、
前記作業台支持手段への前記作業台の格納を検出する作業台格納検出手段とを有する高所作業車であって、
前記昇降作動制御手段は、前記ブームを前記ブーム支持手段に載置支持させて格納し、前記作業台を前記作業台支持手段に載置支持させて格納するときに、
前記作業台を前記ブームの先端部に対して最も降下させた最降下位置から、格納状態における前記作業台の格納上下位置を超えて前記格納上下位置よりも所定高さだけ上昇させた作業台格納準備位置に位置させるように前記作業台を上昇させる制御を行いながら、もしくは前記上昇させる制御を行った後に、前記ブームを倒伏させ、
前記ブーム格納検出手段により前記ブーム支持手段への前記ブームの格納が検出されることに応じて、前記ブームの倒伏作動を停止させるとともに前記作業台を降下させ、
前記作業台格納検出手段により前記作業台支持手段への前記作業台の格納が検出されたときに前記作業台の降下作動を停止させる制御を行うように構成されたことを特徴とする高所作業車。 - 車体に起伏動等が自在に設けられ、前記車体上に倒伏されて格納されるブームと、
前記ブームの先端部に上下方向に昇降動自在に設けられ、前記ブームが格納された状態で前記車体上に格納される作業台と、
前記作業台の昇降作動を制御する昇降作動制御手段と、
前記車体に設けられ、前記車体上に格納された前記ブームを載置させて支持するブーム支持手段と、
前記車体に設けられ、前記車体上に格納された前記作業台を載置させて支持する作業台支持手段と、
前記作業台支持手段への前記作業台の格納を検出する作業台格納検出手段と、
前記ブームが格納位置よりも所定量だけ上方に起伏したブーム格納準備位置に位置することを検出する格納準備位置検出手段とを有する高所作業車であって、
前記昇降作動制御手段は、前記ブームを前記ブーム支持手段に載置支持させて格納し、前記作業台を前記作業台支持手段に載置支持させて格納するときに、
前記作業台を前記ブームの先端部に対して最も降下させた最降下位置から、格納状態における前記作業台の格納上下位置を超えて前記格納上下位置よりも所定高さだけ上昇させた作業台格納準備位置に位置させるように前記作業台を上昇させる制御を行い、
前記格納準備位置検出手段により前記ブームが前記ブーム格納準備位置に位置することが検出されることに応じて、前記ブームを倒伏させながら前記作業台を降下させ、
前記ブーム格納検出手段により前記ブーム支持手段への前記ブームの格納が検出されることに応じて前記ブームの倒伏作動を停止させ、前記作業台格納検出手段により前記作業台支持手段への前記作業台の格納が検出されたときに前記作業台の降下作動を停止させる制御を行うように構成されたことを特徴とする高所作業車。 - 前記ブームは、基端部が前記車体に取り付けられて前記起伏動、旋回動および伸縮動が自在に設けられ、
前記ブームを起伏させるための操作が行われる起伏操作手段と、
前記ブームの起伏角を検出する起伏角検出手段と、
前記ブームの旋回角を検出する旋回角検出手段と、
前記ブームの伸縮状態を検出する伸縮状態検出手段とを備えており、
前記昇降作動制御手段は、前記起伏角検出手段、前記旋回角検出手段および前記伸縮状態検出手段で検出された検出結果に基づいて前記ブームが全縮状態となって前記ブーム格納準備位置に位置することを検出し、且つ、前記ブームを倒伏させるように前記起伏操作手段が操作されたことを検出したときに、前記作業台を前記最降下位置から前記作業台格納準備位置に位置させるように上昇させる制御を行うように構成されたことを特徴とする請求項1または2に記載の高所作業車。 - 前記作業台支持手段に前記作業台を自動で載置支持させて自動格納させる自動格納操作が行われる自動格納操作装置を備えており、
前記昇降作動制御手段は、前記自動格納操作装置に対する前記自動格納操作の検出に応じて、前記作業台を前記最降下位置から前記作業台格納準備位置に位置させるように上昇させる制御を行うように構成されたことを特徴とする請求項1または2に記載の高所作業車。 - 車体に起伏動等が自在に設けられ、前記車体上に倒伏されて格納されるブームと、
前記ブームの先端部に上下方向に昇降動自在に設けられ、前記ブームが格納された状態で前記車体上に格納される作業台と、
前記作業台の昇降作動を制御する昇降作動制御手段と、
前記車体に設けられ、前記車体上に格納された前記ブームを載置させて支持するブーム支持手段と、
前記車体に設けられ、前記車体上に格納された前記作業台を載置させて支持する作業台支持手段と、
前記ブーム支持手段への前記ブームの格納を検出するブーム格納検出手段と、
前記作業台支持手段への前記作業台の格納を検出する作業台格納検出手段とを有する高所作業車であって、
前記昇降作動制御手段は、前記ブームを前記ブーム支持手段に載置支持させて格納し、前記作業台を前記作業台支持手段に載置支持させて格納するときに、
前記ブーム格納検出手段により前記ブームが非格納であることが検出されている状態で前記作業台格納検出手段により前記作業台支持手段への前記作業台の格納が検出されたときには、前記作業台を前記ブームの先端部に対して最も降下させた最降下位置から、格納状態における前記作業台の格納上下位置を超えて前記格納上下位置よりも所定高さだけ上昇させた作業台格納準備位置に位置させるように前記作業台を上昇させる制御を行いながら、もしくは前記上昇させる制御を行った後に、前記ブームを倒伏させ、
前記ブーム格納検出手段により前記ブーム支持手段への前記ブームの格納が検出されることに応じて、前記ブームの倒伏作動を停止させるとともに前記作業台を降下させ、
前記作業台格納検出手段により前記作業台支持手段への前記作業台の格納が検出されたときに、前記作業台の降下作動を停止させる制御を行うように構成されたことを特徴とする高所作業車。 - 前記作業台は、前記最降下位置近傍に位置した状態で前記作業台支持手段に載置支持されて格納されることを特徴とする請求項1〜5のいずれか一項に記載の高所作業車。
- 前記昇降作動制御手段は、前記作業台を昇降作動させる作動速度と、前記作動速度で前記作業台を昇降作動させる作動時間とに基づいて設定される作動条件に基づいて、前記作業台を前記最降下位置から前記作業台格納準備位置に位置させるように上昇させる制御を行うように構成されたことを特徴とする請求項1〜6のいずれか一項に記載の高所作業車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012087447A JP5944722B2 (ja) | 2012-04-06 | 2012-04-06 | 高所作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012087447A JP5944722B2 (ja) | 2012-04-06 | 2012-04-06 | 高所作業車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013216428A true JP2013216428A (ja) | 2013-10-24 |
| JP5944722B2 JP5944722B2 (ja) | 2016-07-05 |
Family
ID=49589050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012087447A Active JP5944722B2 (ja) | 2012-04-06 | 2012-04-06 | 高所作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5944722B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101955609B1 (ko) * | 2017-09-21 | 2019-03-08 | 주식회사 동해기계항공 | 고소작업차의 버켓 레스트 |
| WO2020189578A1 (ja) * | 2019-03-18 | 2020-09-24 | 住友重機械工業株式会社 | 作業機械 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH066397U (ja) * | 1992-02-17 | 1994-01-25 | 株式会社アイチコーポレーション | 高所作業車のバケット支持装置 |
| JP2002362897A (ja) * | 2001-06-08 | 2002-12-18 | Aichi Corp | 高所作業車の作業台格納装置 |
| JP2003040589A (ja) * | 2001-07-27 | 2003-02-13 | Aichi Corp | 高所作業車の作業台昇降装置 |
| JP2003321198A (ja) * | 2002-05-01 | 2003-11-11 | Aichi Corp | 高所作業車の格納制御装置 |
-
2012
- 2012-04-06 JP JP2012087447A patent/JP5944722B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH066397U (ja) * | 1992-02-17 | 1994-01-25 | 株式会社アイチコーポレーション | 高所作業車のバケット支持装置 |
| JP2002362897A (ja) * | 2001-06-08 | 2002-12-18 | Aichi Corp | 高所作業車の作業台格納装置 |
| JP2003040589A (ja) * | 2001-07-27 | 2003-02-13 | Aichi Corp | 高所作業車の作業台昇降装置 |
| JP2003321198A (ja) * | 2002-05-01 | 2003-11-11 | Aichi Corp | 高所作業車の格納制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101955609B1 (ko) * | 2017-09-21 | 2019-03-08 | 주식회사 동해기계항공 | 고소작업차의 버켓 레스트 |
| WO2020189578A1 (ja) * | 2019-03-18 | 2020-09-24 | 住友重機械工業株式会社 | 作業機械 |
| JP2020152473A (ja) * | 2019-03-18 | 2020-09-24 | 住友重機械工業株式会社 | 作業機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5944722B2 (ja) | 2016-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5944722B2 (ja) | 高所作業車 | |
| JP5022626B2 (ja) | 高所作業車 | |
| JP5086032B2 (ja) | 高所作業車のブーム自動格納装置 | |
| JP4658463B2 (ja) | 高所作業車の制御装置 | |
| JP4166966B2 (ja) | 高所作業車の作業台格納装置 | |
| JP4538309B2 (ja) | 軌陸作業車 | |
| JP2008110840A (ja) | 高所作業車の制御装置 | |
| JP2014218331A (ja) | 高所作業車 | |
| JP2001233587A (ja) | 車載式作業機のブーム倒伏規制装置 | |
| JP4528688B2 (ja) | 作業用車両 | |
| JP2006341995A (ja) | 高所作業車の地上乗込制御装置 | |
| JP4080853B2 (ja) | 高所作業車 | |
| JP3923362B2 (ja) | 高所作業車の安全装置 | |
| JP4039819B2 (ja) | 屈伸ブーム式高所作業車 | |
| JP2003321196A (ja) | 高所作業車 | |
| JP3886093B2 (ja) | ブーム作業車の安全装置 | |
| JP4890788B2 (ja) | 高所作業車 | |
| JP3943397B2 (ja) | ブーム作業車 | |
| JPH10236798A (ja) | ブーム作動制御装置 | |
| JP4731895B2 (ja) | 高所作業車の制御装置 | |
| JP2006151628A (ja) | 高所作業車の制御装置 | |
| JPH0723798U (ja) | 高所作業車の安全装置 | |
| JP6041639B2 (ja) | 高所作業車のサブブーム装置 | |
| JP2004175561A (ja) | ブーム式高所作業車の作業範囲規制装置 | |
| JP2006036525A (ja) | ブーム作業車の安全装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160517 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160526 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5944722 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |