JP4479458B2 - 車両およびその制御方法 - Google Patents
車両およびその制御方法 Download PDFInfo
- Publication number
- JP4479458B2 JP4479458B2 JP2004303796A JP2004303796A JP4479458B2 JP 4479458 B2 JP4479458 B2 JP 4479458B2 JP 2004303796 A JP2004303796 A JP 2004303796A JP 2004303796 A JP2004303796 A JP 2004303796A JP 4479458 B2 JP4479458 B2 JP 4479458B2
- Authority
- JP
- Japan
- Prior art keywords
- required torque
- vehicle
- operation amount
- torque
- accelerator operation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/52—Driving a plurality of drive axles, e.g. four-wheel drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
- B60W30/1882—Controlling power parameters of the driveline, e.g. determining the required power characterised by the working point of the engine, e.g. by using engine output chart
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/105—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the function converting demand to actuation, e.g. a map indicating relations between an accelerator pedal position and throttle valve opening or target engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/26—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators
- B60K2006/262—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the motors or the generators the motor or generator are used as clutch, e.g. between engine and driveshaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/40—Electrical machine applications
- B60L2220/42—Electrical machine applications with use of more than one motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2220/00—Electrical machine types; Structures or applications thereof
- B60L2220/50—Structural details of electrical machines
- B60L2220/52—Clutch motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
- B60L2240/16—Acceleration longitudinal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
- B60L2250/28—Accelerator pedal thresholds
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/145—Structure borne vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/16—Driving resistance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
動力出力装置からの動力により走行する車両であって、
運転者によるアクセル操作量を検出するアクセル操作量検出手段と、
車速を検出する車速検出手段と、
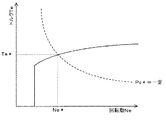
前記検出されたアクセル操作量に対して前記検出された車速が大きいほど第1の減少程度をもって減少する傾向に車両に要求される要求トルクを設定する第1要求トルク設定手段と、
少なくとも前記検出されたアクセル操作量が最大アクセル操作量未満の所定のアクセル操作範囲内にあるとき、前記第1要求トルク設定手段に代えて前記動力出力装置から出力可能な最大トルクを超えない範囲内で少なくとも前記第1の減少程度よりも小さな第2の減少程度をもって前記要求トルクを設定する第2要求トルク設定手段と、
前記設定された要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する駆動制御手段と
を備えることを要旨とする。
、前記検出されたアクセル操作量が前記所定のアクセル操作範囲内の所定操作量に近いほど大きくなる傾向に前記要求トルクを設定する手段であるものとすることもできる。
動力出力装置からの動力により走行する車両の制御方法であって、
(a)運転者によるアクセル操作量に対して車速が大きいほど第1の減少程度をもって減少する傾向に車両に要求される要求トルクを設定し、
(b)少なくとも前記アクセル操作量が最大アクセル操作量未満の所定のアクセル操作範囲内にあるとき、前記ステップ(a)に代えて前記動力出力装置から出力可能な最大トルクを超えない範囲内で少なくとも前記第1の減少程度よりも小さな第2の減少程度をもって前記要求トルクを設定し、
(c)前記設定された要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する
ことを要旨とする。
、車速が大きいほど要求トルクを減少させるものの他、車速が大きいほど要求トルクを増加させるものも含まれる。また、本発明の車両の制御方法としては、動力出力装置からの動力により走行する車両の制御方法であって、(a)運転者によるアクセル操作量に対して車速が大きいほど減少する傾向に車両に要求される要求トルクを設定し、(b)少なくとも前記アクセル操作量が最大アクセル操作量未満の所定アクセル操作範囲内にあるとき、前記動力出力装置から出力可能な最大トルクを超えない範囲内で前記アクセル操作量に基づいて前記設定された要求トルクにトルクを上乗せし、(c)前記要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御するものとすることもできる。
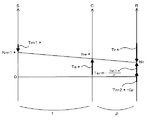
Tm1*=前回Tm1*+KP(Nm1*-Nm1)+KI∫(Nm1*-Nm1)dt (2)
Tm2min=(Win-Tm1*・Nm1)/Nm2 (4)
Tm2max=(Wout-Tm1*・Nm1)/Nm2 (5)
Claims (20)
- 動力出力装置からの動力により走行する車両であって、
運転者によるアクセル操作量を検出するアクセル操作量検出手段と、
車速を検出する車速検出手段と、
前記検出されたアクセル操作量に対して前記検出された車速が大きいほど第1の減少程度をもって減少する傾向に車両に要求される要求トルクを設定する第1要求トルク設定手段と、
少なくとも前記検出されたアクセル操作量がゼロよりも大きい第1の操作量から最大アクセル操作量よりも小さい第2の操作量までの範囲である所定のアクセル操作範囲内にあるとき、前記第1要求トルク設定手段に代えて前記動力出力装置から出力可能な最大トルクを超えない範囲内で少なくとも前記第1の減少程度よりも小さな第2の減少程度をもって前記要求トルクを設定する第2要求トルク設定手段と、
前記設定された要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する駆動制御手段と
を備える車両。 - 前記第2要求トルク設定手段は、前記第1要求トルク設定手段に比して前記検出されたアクセル操作量に対して前記検出された車速が大きいほど前記動力出力装置から出力されるパワーが大きくなる傾向に前記要求トルクを設定する手段である請求項1記載の車両。
- 前記第2要求トルク設定手段は、前記検出されたアクセル操作量が前記所定のアクセル操作範囲内の所定操作量に近いほど小さくなる減少程度をもって前記要求トルクを設定する手段である請求項1または2記載の車両。
- 前記第2要求トルク設定手段は、少なくとも前記検出されたアクセル操作量が前記所定のアクセル操作範囲内の所定操作量のとき、前記検出された車速が大きいほど増加する傾向に前記要求トルクを設定する手段である請求項1ないし3いずれか1項に記載の車両。
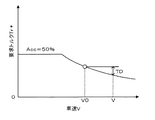
- 前記第2要求トルク設定手段は、少なくとも前記検出されたアクセル操作量が前記所定のアクセル操作範囲内の所定操作量のとき、所定車速範囲内で前記検出された車速に拘わらず該検出されたアクセル操作量に対して車両が略一定の加速度をもって加速するよう前記要求トルクを設定する手段である請求項1ないし4いずれか1項に記載の車両。
- 前記第2要求トルク設定手段は、前記第1要求トルク設定手段により設定される要求トルクよりも大きなトルクを前記要求トルクに設定する手段である請求項1ないし5いずれか1項に記載の車両。
- 前記第2要求トルク設定手段は、車両が加速しているときに該加速の開始から現在までに前記第1要求トルク設定手段により設定される要求トルクの減少分に基づいて前記大きなトルクを前記要求トルクに設定する手段である請求項6記載の車両。
- 前記第2要求トルク設定手段は、前記第1要求トルク設定手段により設定される要求トルクの減少分が大きいほど大きくなる傾向に前記要求トルクを設定する手段である請求項7記載の車両。
- 請求項6ないし8いずれか1項に記載の車両であって、
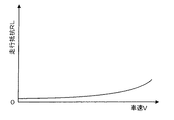
走行抵抗を検出する走行抵抗検出手段を備え、
前記第2要求トルク設定手段は、前記検出された走行抵抗に基づいて前記大きなトルクを前記要求トルクに設定する手段である
車両。 - 前記第2要求トルク設定手段は、前記検出された走行抵抗が大きいほど大きくなる傾向に前記要求トルクを設定する手段である請求項9記載の車両。
- 前記第2要求トルク設定手段は、前記検出されたアクセル操作量に基づいて前記大きなトルクを前記要求トルクに設定する手段である請求項6ないし10いずれか1項に記載の車両。
- 前記第2要求トルク設定手段は、前記検出されたアクセル操作量が前記所定のアクセル操作範囲内の所定操作量に近いほど大きくなる傾向に前記要求トルクを設定する手段である請求項11記載の車両。
- 前記動力出力装置は、内燃機関を備え、該内燃機関からの動力を無段階にトルク変換して出力可能な装置である請求項1ないし12いずれか1項に記載の車両。
- 前記動力出力装置は、内燃機関と、該内燃機関の出力軸と駆動輪に連結された駆動軸とに接続され該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、前記駆動軸に動力を入出力可能な電動機と、を備える装置である請求項1ないし13いずれか1項に記載の車両。
- 前記電力動力入出力手段は、前記内燃機関の出力軸と前記駆動軸と第3の回転軸の3軸に接続され該3軸のうちのいずれか2軸に入出力される動力に基づいて残余の1軸に動力を入出力させる3軸式の動力入出力手段と、前記第3の回転軸に動力を入出力可能な発電機とを備える手段である請求項14記載の車両。
- 前記電力動力入出力手段は、前記内燃機関の出力軸に接続された第1の回転子と前記駆動軸に接続された第2の回転子とを有し該第1の回転子と該第2の回転子との電磁的な作用による電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力する対回転子電動機である請求項14記載の車両。
- 動力出力装置からの動力により走行する車両であって、
運転者によるアクセル操作量を検出するアクセル操作量検出手段と、
車速を検出する車速検出手段と、
前記検出されたアクセル操作量に対して前記検出された車速が大きいほど減少する傾向に車両に要求される要求トルクを設定する要求トルク設定手段と、
少なくとも前記検出されたアクセル操作量がゼロよりも大きい第1の操作量から最大アクセル操作量よりも小さい第2の操作量までの範囲である所定のアクセル操作範囲内にあるとき、前記動力出力装置から出力可能な最大トルクを超えない範囲内で前記検出されたアクセル操作量に基づいて前記設定された要求トルクにトルクを上乗せする要求トルク補正手段と、
前記要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する駆動制御手段と
を備える車両。 - 前記要求トルク補正手段は、更に前記検出された車速が第1の車速から第2の車速までの範囲内にあるときに前記検出されたアクセル操作量に基づいて前記設定された要求トルクにトルクを上乗せする手段である請求項17記載の車両。
- 動力出力装置からの動力により走行する車両の制御方法であって、
(a)運転者によるアクセル操作量に対して車速が大きいほど第1の減少程度をもって減少する傾向に車両に要求される要求トルクを設定し、
(b)少なくとも前記アクセル操作量がゼロよりも大きい第1の操作量から最大アクセル操作量よりも小さい第2の操作量までの範囲である所定のアクセル操作範囲内にあるとき、前記ステップ(a)に代えて前記動力出力装置から出力可能な最大トルクを超えない範囲内で少なくとも前記第1の減少程度よりも小さな第2の減少程度をもって前記要求トルクを設定し、
(c)前記設定された要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する
車両の制御方法。 - 動力出力装置からの動力により走行する車両の制御方法であって、
(a)運転者によるアクセル操作量に対して車速が大きいほど減少する傾向に車両に要求される要求トルクを設定し、
(b)少なくとも前記アクセル操作量がゼロよりも大きい第1の操作量から最大アクセル操作量よりも小さい第2の操作量までの範囲である所定アクセル操作範囲内にあるとき、前記動力出力装置から出力可能な最大トルクを超えない範囲内で前記アクセル操作量に基づいて前記設定された要求トルクにトルクを上乗せし、
(c)前記要求トルクに基づくトルクにより走行するよう前記動力出力装置を駆動制御する
車両の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004303796A JP4479458B2 (ja) | 2004-10-19 | 2004-10-19 | 車両およびその制御方法 |
| CNB2005800358078A CN100509462C (zh) | 2004-10-19 | 2005-10-12 | 车辆和车辆控制方法 |
| PCT/JP2005/019159 WO2006043574A1 (en) | 2004-10-19 | 2005-10-12 | Vehicle and control method of the same |
| EP05795210A EP1819545A1 (en) | 2004-10-19 | 2005-10-12 | Vehicle and control method of the same |
| US11/662,544 US7729838B2 (en) | 2004-10-19 | 2005-10-12 | Vehicle and control method of the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004303796A JP4479458B2 (ja) | 2004-10-19 | 2004-10-19 | 車両およびその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006118359A JP2006118359A (ja) | 2006-05-11 |
| JP2006118359A5 JP2006118359A5 (ja) | 2007-11-22 |
| JP4479458B2 true JP4479458B2 (ja) | 2010-06-09 |
Family
ID=35482163
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004303796A Expired - Lifetime JP4479458B2 (ja) | 2004-10-19 | 2004-10-19 | 車両およびその制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7729838B2 (ja) |
| EP (1) | EP1819545A1 (ja) |
| JP (1) | JP4479458B2 (ja) |
| CN (1) | CN100509462C (ja) |
| WO (1) | WO2006043574A1 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5307394B2 (ja) * | 2006-05-16 | 2013-10-02 | 三菱電機株式会社 | エレベータの制御装置 |
| JP4270275B2 (ja) * | 2006-12-26 | 2009-05-27 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP4860741B2 (ja) * | 2009-09-30 | 2012-01-25 | ジヤトコ株式会社 | 電動駆動ユニット |
| JP2013043589A (ja) * | 2011-08-25 | 2013-03-04 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| KR101284344B1 (ko) * | 2011-12-09 | 2013-07-08 | 현대자동차주식회사 | 구동모터를 구비한 차량의 전류센서 재설정 방법 |
| US9020670B2 (en) * | 2011-12-21 | 2015-04-28 | Ford Global Technologies, Llc | Hybrid electric vehicle and method for smooth engine operation with fixed throttle position |
| WO2013150848A1 (ja) * | 2012-04-02 | 2013-10-10 | 日産自動車株式会社 | 変速比制御装置及び変速比制御方法 |
| GB2519054A (en) * | 2013-07-26 | 2015-04-15 | Equipmake Ltd | Energy saving in vehicles |
| GB201401181D0 (en) * | 2014-01-24 | 2014-03-12 | Jaguar Land Rover Ltd | Controller and method |
| CA3021187C (en) * | 2015-05-01 | 2023-06-27 | Blackburn Energy, Llc | Method and system for auxiliary power generation |
| CN107662603A (zh) * | 2016-07-29 | 2018-02-06 | 德州学院 | 一种混合动力电动汽车的电池管理系统 |
| CN110509777B (zh) * | 2018-05-21 | 2023-04-11 | 上海汽车集团股份有限公司 | 一种汽车、驱动系统及其控制方法 |
| CN112009477B (zh) * | 2019-05-29 | 2022-03-01 | 广州汽车集团股份有限公司 | 汽车控制方法、装置、设备和存储介质 |
| JP7251461B2 (ja) * | 2019-12-13 | 2023-04-04 | トヨタ自動車株式会社 | 制御システム |
| CN112026745B (zh) * | 2020-09-01 | 2021-12-21 | 潍柴动力股份有限公司 | 混合动力汽车驱动模式调节方法、装置和混合动力汽车 |
| CN112487550B (zh) * | 2020-11-16 | 2023-04-07 | 浙江吉利控股集团有限公司 | 一种车辆加速需求功率的确定方法、装置、电子设备及存储介质 |
| JP7310842B2 (ja) | 2021-03-01 | 2023-07-19 | いすゞ自動車株式会社 | 出力制御システム |
| DE102021112440A1 (de) * | 2021-05-12 | 2022-11-17 | Bayerische Motoren Werke Aktiengesellschaft | Steuervorrichtung zum Betrieb eines straßengekoppelten Allradfahrzeuges |
| CN113147721B (zh) * | 2021-05-27 | 2023-03-07 | 中国第一汽车股份有限公司 | 控制发动机起动方法、装置、电子设备以及存储介质 |
| CN115416679B (zh) * | 2022-09-27 | 2024-09-27 | 上汽通用五菱汽车股份有限公司 | 智能驾驶的加速度控制方法、装置、终端以及存储介质 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04203250A (ja) * | 1990-11-29 | 1992-07-23 | Mitsubishi Motors Corp | 走行負荷分補償式速度制御部付ドライブバイワイヤ式車両 |
| US5470290A (en) * | 1991-02-25 | 1995-11-28 | Hitachi, Ltd. | Change gear control device using acceleration and gear ratio as parameters for automatic transmission in a motor vehicle and the method therefor |
| JP3445291B2 (ja) * | 1992-10-13 | 2003-09-08 | 株式会社日立製作所 | 駆動トルク制御装置 |
| JP3050125B2 (ja) | 1996-05-20 | 2000-06-12 | トヨタ自動車株式会社 | 動力出力装置および動力出力装置の制御方法 |
| US6792344B2 (en) * | 1997-04-25 | 2004-09-14 | Hitachi, Ltd. | Automotive control apparatus and method |
| JP3216082B2 (ja) | 1997-09-17 | 2001-10-09 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| US6554088B2 (en) * | 1998-09-14 | 2003-04-29 | Paice Corporation | Hybrid vehicles |
| JP3397160B2 (ja) * | 1999-02-12 | 2003-04-14 | トヨタ自動車株式会社 | 動力源と無段変速機を備えた車両の制御装置 |
| JP3617467B2 (ja) | 2001-03-26 | 2005-02-02 | 日産自動車株式会社 | 車両用ハイブリッド・パワートレインの制御装置 |
| US7004018B2 (en) * | 2002-08-27 | 2006-02-28 | Nissan Motor Co., Ltd. | Vehicle driving force control apparatus |
| JP3809824B2 (ja) * | 2002-09-10 | 2006-08-16 | トヨタ自動車株式会社 | ハイブリッド車 |
| CN1238213C (zh) * | 2003-10-17 | 2006-01-25 | 清华大学 | 混合动力轿车动力总成的动力输出切换方法及其控制系统 |
| JP4196958B2 (ja) * | 2005-03-03 | 2008-12-17 | トヨタ自動車株式会社 | ハイブリッド車およびその制御方法 |
-
2004
- 2004-10-19 JP JP2004303796A patent/JP4479458B2/ja not_active Expired - Lifetime
-
2005
- 2005-10-12 WO PCT/JP2005/019159 patent/WO2006043574A1/en not_active Ceased
- 2005-10-12 CN CNB2005800358078A patent/CN100509462C/zh not_active Expired - Lifetime
- 2005-10-12 EP EP05795210A patent/EP1819545A1/en not_active Ceased
- 2005-10-12 US US11/662,544 patent/US7729838B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20080045377A1 (en) | 2008-02-21 |
| CN100509462C (zh) | 2009-07-08 |
| US7729838B2 (en) | 2010-06-01 |
| EP1819545A1 (en) | 2007-08-22 |
| JP2006118359A (ja) | 2006-05-11 |
| CN101044037A (zh) | 2007-09-26 |
| WO2006043574A1 (en) | 2006-04-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4086018B2 (ja) | ハイブリッド車およびその制御方法並びに動力出力装置 | |
| JP4479458B2 (ja) | 車両およびその制御方法 | |
| JP4135681B2 (ja) | 動力出力装置およびこれを搭載するハイブリッド車並びにこれらの制御方法 | |
| JP2009126450A (ja) | ハイブリッド車及びハイブリッド車の制御方法 | |
| JP2005020820A (ja) | ハイブリッド自動車およびその制御方法 | |
| JP2009126253A (ja) | ハイブリッド車およびその制御方法 | |
| JP5682639B2 (ja) | ハイブリッド自動車 | |
| JP2006020481A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2010064522A (ja) | 車両およびその制御方法 | |
| JP2005210841A (ja) | 自動車およびその制御方法 | |
| JP3894184B2 (ja) | 自動車およびその制御方法 | |
| JP2005051832A (ja) | 車両およびその制御方法 | |
| JP2007118918A (ja) | 車両およびその制御方法 | |
| JP4365354B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4196986B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4345765B2 (ja) | 車両およびその制御方法 | |
| JP2009184387A (ja) | ハイブリッド車およびその制御方法 | |
| JP4066985B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2008143426A (ja) | 車両およびその制御方法 | |
| JP4301252B2 (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP2004346781A (ja) | 動力出力装置およびその制御方法並びに自動車 | |
| JP4983626B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4258519B2 (ja) | 車両およびその制御方法 | |
| JP2009137384A (ja) | 車両および駆動装置並びに車両の制御方法 | |
| JP2009166659A (ja) | 車両およびその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100223 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100308 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130326 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4479458 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130326 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140326 Year of fee payment: 4 |
|
| EXPY | Cancellation because of completion of term |