JP4396665B2 - ハイブリッド車両のエンジン始動時クラッチ締結制御装置 - Google Patents
ハイブリッド車両のエンジン始動時クラッチ締結制御装置 Download PDFInfo
- Publication number
- JP4396665B2 JP4396665B2 JP2006164631A JP2006164631A JP4396665B2 JP 4396665 B2 JP4396665 B2 JP 4396665B2 JP 2006164631 A JP2006164631 A JP 2006164631A JP 2006164631 A JP2006164631 A JP 2006164631A JP 4396665 B2 JP4396665 B2 JP 4396665B2
- Authority
- JP
- Japan
- Prior art keywords
- clutch
- target value
- engine
- motor
- generator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Hydraulic Clutches, Magnetic Clutches, Fluid Clutches, And Fluid Joints (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
特に、前者のEVモードでの走行中にエンジン出力が必要になって後者のHEVモードへ切り換えるに際し要求されるエンジン始動を駆動力の途切れなしに行い得るようにしたクラッチの締結制御技術に係わる。
このハイブリッド駆動装置は、エンジン回転を変速機に向かわせる軸に結合して、これらエンジンおよび変速機間にモータ/ジェネレータを具え、エンジンおよびモータ/ジェネレータ間を切り離し可能に結合する第1クラッチを有すると共に、モータ/ジェネレータおよび変速機出力軸間を切り離し可能に結合する第2クラッチをトルクコンバータの代わりに有した構成になるものである。
モータ/ジェネレータおよび変速機間にあって締結状態の第2クラッチを一旦解放し、この状態で上記第1クラッチの締結およびモータ/ジェネレータによるエンジンの始動を行わせる技術も提案されている。
このクラッチ締結制御技術は、クラッチの入力側回転数を出力側回転数との関連においてモータにより制御しつつつ、これに応じてクラッチを締結制御するというものである。
かようにクラッチの出力側回転数が外乱によって変化すると、第2クラッチの入出力側回転数間における回転差である第2クラッチのスリップ回転が狙い通りのものにならず、目標とするクラッチのスリップ制御を実現し得ないことから、過大なスリップによりクラッチの劣化を早めたり、スリップの不足により前記した所定のショック防止効果を実現し得ないという問題を生ずる。
しかし、クラッチの入力側回転数について相変わらずフィードフォワード制御を行うというのでは、所望のスリップ回転数が得られるという保証がないため、目標とする第2クラッチのスリップ制御を実現し得ないばかりでなく、モータ/ジェネレータから第2クラッチへのトルクがエンジン始動負荷だけ低下されたときや、エンジン始動後に第2クラッチを締結させるためクラッチ油圧を上昇させるときに、第2クラッチの入力側回転数が出力側回転数に引き込まれて第2クラッチが急締結し、運転者にとって不快な加速度変動を生ずるという懸念があった。
かかる第2クラッチのスリップ制御に際し、上記諸々の問題を生ずることのないようにしたハイブリッド車両のエンジン始動時クラッチ締結制御装置、つまり、
外乱発生時もクラッチの入出側回転数が変化することがなくて狙い通りのエンジン始動時スリップ制御を実現することができると共に、
モータ/ジェネレータから第2クラッチへのトルクがエンジン始動負荷だけ低下された時や、エンジン始動後に第2クラッチを締結させるためクラッチ油圧を上昇させる時に、第2クラッチの入力側回転数が出力側回転数に引き込まれて第2クラッチが急締結し、不快な加速度変動が発生するという問題を生ずることのないようにしたハイブリッド車両のエンジン始動時クラッチ締結制御装置を提案することを目的とする。
まず前提となるハイブリッド車両につき説明するに、これは、
動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよびモータ/ジェネレータ間に伝達トルク容量を変更可能な第1クラッチを介在させ、モータ/ジェネレータおよび駆動車輪間に伝達トルク容量を変更可能な第2クラッチを介在させ、
エンジンを停止させ、第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチを共に締結することによりエンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能にしたものである。
運転者による車両の運転操作や、車両の走行状態から、前記第2クラッチの駆動車輪側における出力側回転数の目標値を演算する第2クラッチ出力側回転数目標値演算手段と、
前記第2クラッチの出力側回転数を検出する第2クラッチ出力側回転数検出手段と、
これら第2クラッチ出力側回転数目標値および第2クラッチ出力側回転数検出値間における第2クラッチ出力側回転数偏差を低下させる前記第2クラッチの伝達トルク容量目標値を演算する第2クラッチ伝達トルク容量目標値演算手段と、
前記第2クラッチをその伝達トルク容量が、前記第2クラッチ伝達トルク容量目標値となるよう締結制御する第2クラッチ伝達トルク容量制御手段と、
運転者による車両の運転操作や、車両の走行状態から、前記第2クラッチのモータ/ジェネレータ側における入力側回転数の目標値を演算する第2クラッチ入力側回転数目標値演算手段と、
前記第2クラッチの入力側回転数を検出する第2クラッチ入力側回転数検出手段と、
これら第2クラッチ入力側回転数目標値および第2クラッチ入力側回転数検出値間における第2クラッチ入力側回転数偏差を低下させる前記モータ/ジェネレータの出力トルク目標値を演算するモータ/ジェネレータ出力トルク目標値演算手段と、
前記モータ/ジェネレータをその出力トルクが、前記モータ/ジェネレータ出力トルク目標値となるよう駆動制御するモータ/ジェネレータ出力トルク制御手段とを設け、
第1クラッチ締結制御手段による前記第1クラッチの締結を介したモータ/ジェネレータによるエンジン始動時に、前記第2クラッチの入出力間スリップ回転が、エンジン始動前の前記第2クラッチ出力側回転数目標値および第2クラッチ入力側回転数目標値間におけるスリップ回転目標値よりも大きくなるよう構成したことを特徴とするものである。
エンジン始動時以外は、
第2クラッチの出力側回転数目標値および出力側回転数検出値間における偏差を低下させるよう第2クラッチの伝達トルク容量を制御すると共に、
第2クラッチの入力側回転数目標値および入力側回転数検出値間における偏差を低下させるようモータ/ジェネレータの出力トルクを制御する。
第2クラッチのスリップ回転が、エンジン始動前の上記第2クラッチ出力側回転数目標値および第2クラッチ入力側回転数目標値間におけるスリップ回転目標値よりも大きくなるよう第2クラッチをスリップ制御する。
このため、エンジン始動時に第2クラッチを完全に解放させずスリップ状態にしておくこととなり、エンジン始動中も駆動車輪に駆動力が伝達され続けて、図18につき前述した一時的な加速不足や減速感に関する問題を生ずることがない。
図1は、本発明のエンジン始動時クラッチ締結制御装置を具えたハイブリッド車両の車輪駆動系(パワートレーン)を、その制御システムと共に示し、
1は、第1動力源としてのモータ/ジェネレータ、2は、第2動力源としてのエンジン、3L,3Rはそれぞれ、左右駆動車輪(左右後輪)である。
このモータ/ジェネレータ1およびエンジン2間、詳しくは、軸5とエンジンクランクシャフト2aとの間に第1クラッチ6を介挿し、この第1クラッチ6によりエンジン2およびモータ/ジェネレータ1間を切り離し可能に結合する。
ここで第1クラッチ6は、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
第2クラッチ7も第1クラッチ6と同様、伝達トルク容量を連続的または段階的に変更可能なものとし、例えば、比例ソレノイドでクラッチ作動油流量およびクラッチ作動油圧を連続的に制御して伝達トルク容量を変更可能な湿式多板クラッチで構成する。
従って自動変速機4は、入力軸4aからの回転を選択変速段に応じたギヤ比で変速して出力軸4bに出力する。
この出力回転は、ディファレンシャルギヤ装置を含む終減速機8により左右後輪3L,3Rへ分配して伝達され、車両の走行に供される。
但し自動変速機4は、上記したような有段式のものに限られず、無段変速機であってもよいのは言うまでもない。
この状態でモータ/ジェネレータ1を駆動すると、当該モータ/ジェネレータ1からの出力回転のみが変速機入力軸4aに達することとなり、自動変速機4が当該入力軸4aへの回転を、選択中の変速段に応じ変速して変速機出力軸4bより出力する。
変速機出力軸4bからの回転はその後、ディファレンシャルギヤ装置を含む終減速機8を経て左右後輪3L,3Rに至り、車両をモータ/ジェネレータ1のみによって電気走行(EV走行)させることができる。
この状態では、エンジン2からの出力回転、または、エンジン2からの出力回転およびモータ/ジェネレータ1からの出力回転の双方が変速機入力軸4aに達することとなり、自動変速機4が当該入力軸4aへの回転を、選択中の変速段に応じ変速して、変速機出力軸4bより出力する。
変速機出力軸4bからの回転はその後、終減速機8を経て左右後輪3L,3Rに至り、車両をエンジン2およびモータ/ジェネレータ1の双方によってハイブリッド走行(HEV走行)させることができる。
図1の制御システムは、パワートレーンの動作点を統合制御する統合コントローラ20を具え、パワートレーンの動作点を、エンジントルク目標値tTeと、モータ/ジェネレータトルク目標値tTm(モータ/ジェネレータ回転数目標値tNmでもよい)と、第1クラッチ6の伝達トルク容量目標値tTc1(クラッチ油圧ソレノイド電流Ic1でもよい)と、第2クラッチ7の目標伝達トルク容量tTc2(クラッチ油圧ソレノイド電流Ic2でもよい)と、自動変速機4の目標変速段Gmとで規定する。
このときバッテリ21が過充電にならないよう、バッテリコントローラ23によりバッテリ21を充電制御する。
このためバッテリコントローラ23は、バッテリ21の蓄電状態SOC(持ち出し可能電力)を検出し、これに関する情報を統合コントローラ20に供給する。
エンジントルク目標値tTeはエンジンコントローラ24に供給され、モータ/ジェネレータトルク目標値tTmはモータ/ジェネレータコントローラ25に供給される。
モータ/ジェネレータコントローラ25はモータ/ジェネレータ1のトルクTmがモータ/ジェネレータトルク目標値tTmとなるよう、バッテリ21からの電力によりインバータ22を介してモータ/ジェネレータ1を制御する。
従ってモータ/ジェネレータコントローラ25は、モータ/ジェネレータ出力トルク制御手段に相当する。
クラッチコントローラ26は、一方で第1クラッチ伝達トルク容量目標値tTc1に対応したクラッチ油圧ソレノイド電流Ic1を第1クラッチ6の油圧制御ソレノイドに供給し、第1クラッチ6の伝達トルク容量Tc1が伝達トルク容量目標値tTc1に一致するよう第1クラッチ6を締結制御する。
クラッチコントローラ26は他方で、第2クラッチ伝達トルク容量目標値tTc2に対応したクラッチ油圧ソレノイド電流Ic2を第2クラッチ7の油圧制御ソレノイドに供給し、第2クラッチ7の伝達トルク容量Tc2が第2クラッチ伝達トルク容量目標値tTc2に一致するよう第2クラッチ7を締結制御する。
従ってクラッチコントローラ26は、第2クラッチ伝達トルク容量制御手段に相当する。
これがため、第2クラッチ7の入力側回転数Nc2iとしてモータ/ジェネレータ1の回転数を検出する第2クラッチ入力側回転数センサ13(第2クラッチ入力側回転数検出手段に相当する)、および、第2クラッチ7の出力側回転数Nc2oとして変速機入力軸4aの回転数を検出する第2クラッチ出力側回転数センサ14(第2クラッチ出力側回転数検出手段に相当する)、並びに、第2クラッチ7の作動油温Tempを検出する油温センサ16を設け、これら回転センサ13,14および油温センサ16からの信号をクラッチコントローラ26を経て統合コントローラ20に入力する。
この制御プログラムは定時割り込みにより繰り返し実行されるもので、
先ずステップS1において、各コントローラ23〜27からのデータを受信し、バッテリ蓄電状態SOCや、エンジン回転数Neや、第2クラッチ7の入力側回転数Nc2iおよび出力側回転数Nc2oや、第2クラッチ7の作動油温Tempや、自動変速機4の選択変速段(選択ギヤ比)Gmを読み込む。
次のステップS3においては、例えば図6に示す予定の駆動力マップをもとに、車速VSPおよびアクセル開度APOから車輪駆動トルク目標値tTdを検索により求める。
詳細は本発明と関係ないため省略するが、緩加速発進のような低負荷、低車速のもとでは、エンジン2の燃焼効率が比較的悪いため、エンジン2を使わずモータ/ジェネレータ1のみによるEV走行を行わせるため、第1クラッチ6を解放させるべきと判定して第1クラッチ制御モードフラグfCL1=0と決定する。
かかる第2クラッチ制御モードフラグCL2MODEは、図3の制御プログラムを実行して決定する。
fCL1=0であれば、つまり、第1クラッチ6を解放してエンジン2の停止によりEV走行すべきであれば、制御をステップS52に進め、ここで車速VSPが0の停車状態か否かをチェックする。
停車状態であればステップS53において、第2クラッチ7を発進に備えて締結させておくべきであるから第2クラッチ制御モードフラグCL2MODE=1(締結)に設定する。
しかし、ステップS52で車速VSPが0でないと判定する時は、つまり、車両が走行している(EV走行している)時は、ステップS54において、第2クラッチ7をエンジン始動に備えてスリップ締結させておくべきであるから第2クラッチ制御モードフラグCL2MODE=2(スリップ)に設定する。
ステップS56で駆動トルク目標値tTd<0と判定する逆駆動要求時は、EV走行中から第2クラッチ7をスリップ締結させておくと好適なエンジン始動が行われないから制御をステップS57に進め、第2クラッチ制御モードフラグCL2MODE=0(解放)に設定する。
ステップS58でCL2MODE(前回)=1と判定する時、つまり、第2クラッチが前回締結されていた場合は、ステップS53において第2クラッチ制御モードフラグCL2MODE=1(締結)に保つ。
ステップS59で第2クラッチ7のスリップ条件が成立したと判定する時は、第2クラッチ7をスリップ締結させるべきであるから、ステップS54において第2クラッチ制御モードフラグCL2MODE=2(スリップ)に設定し、
ステップS59で第2クラッチ7のスリップ条件が成立していないと判定する時は、第2クラッチ7をスリップさせるべきでないから、ステップS53において第2クラッチ制御モードフラグCL2MODE=1(締結)に設定する。
なお車輪駆動トルク目標値tTdの分担方法は任意であり、発明と関係ないため詳細な説明をここでは省略する。
このチェックに当たっては、例えば、ステップS5で設定した第2クラッチ制御モードCL2MODEが2(第2クラッチ7をスリップ締結させるべき)であり、且つ、第2クラッチ7の入力側回転数Nc2iおよび出力側回転数Nc2o間におけるスリップ量が設定値以上である間は、本発明が狙いとする第2クラッチ7のスリップ回転(締結)制御を行うべき(ON)と判定し、それ以外では第2クラッチ7の当該スリップ回転(締結)制御を行うべきでない(OFF)と判定する。
この基本第2クラッチ伝達トルク容量目標値tTc2baseは、例えばステップS3でアクセル開度APOおよび車速VSPから求めた車輪駆動トルク目標値tTdと同じ値にしてもよいが、以下のようにして求めることもできる。
つまり、第2クラッチ7の入力側回転数Nc2iに対する出力側回転数Nc2oの比で表される速度比E(=Nc2o/Nc2i)から、図7に例示するトルクコンバータ特性に基づき第2クラッチ7の伝達トルク容量係数Cc2を求め、これと、第2クラッチ7の入力側回転数Nc2iとを用いた次式の演算により、基本クラッチ伝達トルク容量目標値tTclbaseを求めてもよい。
tTc2base=Cc2×Nc2i2 ・・・(1)
第2クラッチ出力側回転数目標値演算手段および第2クラッチ入力側回転数目標値演算手段に相当する図2のステップS9においては、ステップS8で求めた基本第2クラッチ伝達トルク容量目標値tTc2baseと、ステップS4で設定した第1クラッチ制御モードフラグfCL1とから、第2クラッチ7の出力側回転数目標値tNc2oおよび入力側回転数目標値tNc2iを以下のようにして求める。
図5に第2クラッチ出力側回転数目標値演算部32として示すごとく、基本第2クラッチ伝達トルク容量目標値tTc2baseと、予め求めておいた平坦路での車両走行抵抗Trとに基づく次式の演算により、出力軸駆動トルク目標値tToを求め、
tTo=tTc2base−Tr ・・・(2)
次いで、この車輪駆動トルク目標値tTdと、車両慣性モーメントJoと、車輪駆動系における自動変速機4の選択変速段で決まる変速比Gmと、車輪駆動系における終減速機8の最終減速比Gfとに基づき、第2クラッチ7のクラッチ出力側回転数目標値tNc2oを次式
tNc2o={(Gm・Gf)2/Jo}×(1/s)×tTd ・・・(3)
の演算により求める。
tTo=tTc2base−Tr−(Tslope×Kslope) ・・・(4)
を前記(2)式の代わりに用い、(4)式の演算により出力軸駆動トルク目標値tToを求めることもできる。
路面勾配の推定に当たっては例えば、加速度センサによる車両加速度検出値と、車速VSPの時間微分値である車両加速度演算値との間における偏差から推定することができる。
勾配分走行抵抗係数Kslopeを0にした場合、勾配分車両走行抵抗Tslopeが出力軸駆動トルク目標値tToへ全く反映されず、(3)式により求めた第2クラッチ7のクラッチ出力側回転数目標値tNc2oを平坦路走行時と同じにして、平坦路走行時と同様な加速性能にすることができる。
従って、勾配分走行抵抗係数Kslopeを0〜1の間の任意の値に設定することで、望みの加速性能を自由に実現することができる。
そして、前記したようにして求めた第2クラッチ出力側回転数目標値tNc2oに上記の第2クラッチスリップ回転目標値tNc2slipを加算して第2クラッチ入力側回転数目標値tNc2iを求める。
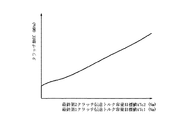
なお第2クラッチスリップ回転目標値tNc2slipは、図8から明らかなように、第2クラッチ伝達トルク容量目標値tTc2baseが大きいほど小さく、また、第2クラッチ作動油温Tempが高いほど小さく設定することにより、第2クラッチ7の過熱防止を図る。
このようにして求めた第2クラッチスリップ回転目標値tNc2slipを前記した第2クラッチ出力側回転数目標値tNc2oに加算して第2クラッチ入力側回転数目標値tNc2iを求める。
ここでエンジン始動用モータトルクTengstの演算に当たっては、例えば、バッテリ蓄電状態SOCからモータ/ジェネレータ1の出力可能最大トルクを推定し、このモータ出力可能最大トルクから、予め任意に設定しておいた車輪駆動用最大トルクを差し引いて求めたトルク値をエンジン始動用モータトルクTengstとする。
ここで、エンジン始動後も第2クラッチ7のスリップ締結制御を継続する場合、第2クラッチ7のスリップ回転数は、増加分を加算せずEV走行中のスリップ回転と同じとする。
ところで、上記したように第2クラッチ出力側回転数目標値tNc2oに第2クラッチスリップ回転目標値tNc2slipを加算して第2クラッチ入力側回転数目標値tNc2iを求める場合、仮に第2クラッチ7の出力側回転数Nc2oがその目標値tNc2oに一致しなくても、比較的制御性能(制御応答、トルクの絶対精度)に優れるモータ/ジェネレータ1により第2クラッチ7の入力側回転数Nc2iをその目標値tNc2iに一致させることができるから、第2クラッチ7のスリップ回転Nc2slipを目標値tNc2slipに一致させることができる。
Tc2ff=GFF(s)×tTc2base={Gc2ref(s)/Gc2(s)}×tTc2base
={(τc2・s+1)/ (τc2ref・s+1)}×tTc2base ・・・(5)
Gc2ref(s):第2クラッチの規範モデル
Gc2(s):第2クラッチの実際モデル
τc2 :第2クラッチのモデル時定数
τc2ref :第2クラッチ制御用規範応答時定数
Nc2oref=Gc2ref(s)×tNc2o
={1/ (τc2ref・s+1)}×tNc2o ・・・(6)
τc2ref :第2クラッチ制御用規範応答時定数
この第2クラッチ伝達トルク容量補正値Tc2fbの演算に当たっては実際には、タスティン近似などで離散化して得られた以下の漸化式を用いて当該演算を行うこととする。
Tc2fb={Kc2p+(Kc2i/s)}・Nc2oerr ・・・(7)
Kc2p:比例制御ゲイン
Kc2i:積分制御ゲイン
ステップS4で設定した第1クラッチ制御モードフラグfCL1が1で、第1クラッチ6を締結させるべきとの判定にもかかわらず、未だ第1クラッチ6が締結していない(Ne≠Nc2iである)場合、エンジン始動時第2クラッチ伝達トルク容量補正値ΔTc2eを、エンジン始動用モータトルクTengstと、アクセル開度APOとの関数として求め、例えば、図10に示すようなマップを基にエンジン始動用モータトルクTengstおよびアクセル開度APOからエンジン始動時第2クラッチ伝達トルク容量補正値ΔTc2eを検索する。
第2クラッチ伝達トルク容量目標値演算手段に相当するステップS14においては、前記したフィードフォワード制御用第2クラッチ伝達トルク容量目標値tTc2ffと、前記した第2クラッチ伝達トルク容量補正値Tc2fbとを合算した後、この合算値から前記したエンジン始動時第2クラッチ伝達トルク容量補正値ΔTc2eを差し引いて、第2クラッチスリップ回転制御用第2クラッチ伝達トルク容量目標値Tc2fbonを求め、
ステップS17においては、この第2クラッチスリップ回転制御用第2クラッチ伝達トルク容量目標値Tc2fbonを最終第2クラッチ伝達トルク容量目標値tTc2とする。
なお、第2クラッチ7を締結状態にしたり、この定常状態に保つためのクラッチ通常制御用クラッチ伝達トルク容量目標値tTc2fboffは、第2クラッチ7が実現可能な最大値とし、第2クラッチ7を解放状態にしたり、この定常状態に保つためのクラッチ通常制御用クラッチ伝達トルク容量目標値tTc2fboffは、第2クラッチ7の現在における伝達トルク容量から徐々に低下させる。
(1)第2クラッチの締結時
tTc2(前回値)<tTd×Ksafeであれば、
tTc2fboff=tTc2(前回値)+ΔTc2(L/U) とし、
tTc2(前回値)≧tTd×Ksafeであれば、
tTc2fboff=tTd×Ksafe とする。
但し、Ksafe:第2クラッチ伝達トルク容量安全率(>1)
ΔTc2(L/U):第2クラッチ締結進行時トルク容量増加率
(2)第2クラッチの解放時
無条件にtTc2fboff=0 とする。
(3)第2クラッチの締結状態からスリップ制御への移行時
無条件にtTc2fboff=tTc2(前回値)−ΔTc2(SLIP) とする。
但し、ΔTc2(SLIP):第2クラッチスリップ移行時トルク容量低下率
ステップS15およびステップS16を通るループが選択される場合、第2クラッチ7のスリップ締結制御を行うべきでないと判定したのに呼応して、ステップS16で求めた第2クラッチ通常制御用第2クラッチ伝達トルク容量目標値tTc2fboffを最終第2クラッチ伝達トルク容量目標値tTc2とする。
つまり、ステップS4で設定した第1クラッチ制御モードフラグfCL1が1(第1クラッチ6を締結させるべき)で、且つ、第2クラッチ7の実スリップ回転数Nc2slipが第2クラッチスリップ回転目標値tNc2slip(エンジン始動時はエンジン始動時第2クラッチスリップ回転目標値)以上である場合は、第1クラッチ伝達トルク容量目標値tTc1を第1クラッチ6の実現可能最大伝達トルク容量Tc1maxとし、
第1クラッチ制御モードフラグfCL1が0(第1クラッチ6を解放させるべき)である場合は、第1クラッチ伝達トルク容量目標値tTc1を0にする。
つまり、先ず図11に例示する予定のマップをもとに最終第2クラッチ伝達トルク容量目標値tTc2および第1クラッチ伝達トルク容量目標値tTc1を実現する第2クラッチ7および第1クラッチ6のクラッチ油圧を検索し、
次いで図12に例示するマップをもとに当該クラッチ油圧を発生する第2クラッチ7および第1クラッチ6の油圧ソレノイド電流Ic2,Ic1をそれぞれ決定する。
かように決定した第2クラッチ7の油圧ソレノイド電流をステップS17において、対応するクラッチコントローラ26へ供給し、このコントローラにより第2クラッチ7を、その伝達トルク容量が最終クラッチ伝達トルク容量目標値tTclに一致するよう締結制御する。
この選択に当たっては、ステップS7がステップS8〜ステップS14を通るループを選択する第2クラッチ7のスリップ締結制御中は、モータ/ジェネレータ1の制御指令値として前者の第2クラッチ入力側回転数目標値tNc2iを用いることにより、この第2クラッチ入力側回転数目標値tNc2iと第2クラッチ入力側回転数検出値Nc2iとの間における偏差Nc2ierrを0にして第2クラッチ入力側回転数検出値Nc2iを第2クラッチ入力側回転数目標値tNc2iに一致させるようモータ/ジェネレータ1の出力トルクを制御し、
ステップS7がステップS15およびステップS16を通るループを選択して第2クラッチ7をスリップ締結制御していない間は、モータ/ジェネレータ1の制御指令値として後者の基本モータトルク目標値tTmbaseを用いることにより、モータ/ジェネレータ1の出力トルクをこの目標値tTmbaseに一致させる。
従ってステップS20は、モータ/ジェネレータ1の制御指令値として前者の第2クラッチ入力側回転数目標値tNc2iを用いる間、モータ/ジェネレータ出力トルク目標値演算手段に相当する。
一方では、第2クラッチ出力側回転数目標値演算手段が運転者による車両の運転操作や、車両の走行状態から演算した第2クラッチ出力側回転数目標値tNc2oと、第2クラッチ出力側回転数検出手段からの第2クラッチ出力側回転数検出値Nc2oとの間における第2クラッチ出力側回転数偏差Nc2oerrを基に、第2クラッチ伝達トルク容量目標値演算手段がこの偏差を低下させる第2クラッチ伝達トルク容量目標値tTc2fbonを演算し、第2クラッチ伝達トルク容量制御手段が第2クラッチ7をこの第2クラッチ伝達トルク容量目標値tTc2fbonとなるよう締結制御し、
他方では、第2クラッチ入力側回転数目標値演算手段が運転者による車両の運転操作や、車両の走行状態から演算した第2クラッチ入力側回転数目標値tNc2iと、第2クラッチ入力側回転数検出手段からの第2クラッチ入力側回転数検出値Nc2iとの間における第2クラッチ入力側回転数偏差Nc2ierrを基に、モータ/ジェネレータ出力トルク目標値演算手段がこの偏差を低下させるモータ/ジェネレータ出力トルク目標値tTmを演算し、モータ/ジェネレータ出力トルク制御手段がモータ/ジェネレータ1をモータ/ジェネレータ出力トルク目標値tTmとなるよう駆動制御する。
第2クラッチ7の出力側回転数目標値tNc2oおよび出力側回転数検出値Nc2o間における偏差Nc2oerrを低下させるよう第2クラッチ7の伝達トルク容量を制御すると共に、第2クラッチの入力側回転数目標値tNc2iおよび入力側回転数検出値Nc2i間における偏差Nc2ierrを低下させるようモータ/ジェネレータ1の出力トルクを制御することとなり、
外乱が発生しても、第2クラッチ7の入出側回転数をそれぞれの目標値に一致させることができて、第2クラッチを狙い通りにスリップ制御することができ、過大なスリップにより第2クラッチの劣化を早めたり、スリップの不足により所定のショック防止効果を実現し得ないという問題を回避することができる。
第1クラッチ締結制御手段による第1クラッチ6の締結を介したモータ/ジェネレータ1によるエンジン始動時は、第2クラッチ7の入出力間スリップ回転Nc2slipが、エンジン始動前の第2クラッチ出力側回転数目標値tNc2oおよび第2クラッチ入力側回転数目標値tNc2i間におけるスリップ回転目標値よりも大きくなるよう、図2のステップS13で演算したエンジン始動時第2クラッチ伝達トルク容量補正値ΔTc2eだけ図5に示すごとく第2クラッチの伝達トルク容量を低下させる構成としたため、
エンジン始動時に第2クラッチ7を完全に解放させずスリップ状態にしておくこととなり、エンジン始動中も駆動車輪に駆動力が伝達され続けて、図18につき前述した一時的な加速不足や減速感に関する問題を生ずることがない。
このため、エンジン始動時に第2クラッチ7を完全に解放させずスリップ締結状態にしておくこととなり、エンジン始動中も駆動車輪に駆動力が伝達され続けて、エンジン始動要求時t1の直後における車両加速度波形から明らかなように一時的な加速不足や減速感を生ずることがない。
第2クラッチ入力側回転数目標値tNc2iを増大してこれが達成されるようモータ/ジェネレータ1の出力トルクを増大させて所期の目的が達成されるようにしたから、上記の作用効果を第2クラッチ伝達トルク容量制御よりも高応答なモータ/ジェネレータトルク制御により速やかに、且つ、高精度に達成することができる。
エンジン始動第2クラッチスリップ回転目標値tNc2slip(第2クラッチ入力側回転数目標値tNc2i)の増大量は、図15に例示するごとくモータ/ジェネレータ1のエンジン始動用モータトルクTengstが大きいほど大きくするのがよい。
この場合、バッテリ蓄電状態SOCの低下でエンジン始動用モータトルクTengstを大きく確保することができなくなった時においても、第2クラッチ7のスリップ増大により車両の加速度変動を抑制することができる。
エンジン始動要求時t1に至ってから締結状態の第2クラッチ7をスリップ状態へ移行させる場合に比べ、制御の応答性を高めて前記の作用効果を速やかに達成することができる。
この場合、第2クラッチ7の入力側回転数目標値tNc2iが、図15に示すと同じものを移記した図16に実線で示すものから破線A2で示すごときものとなり、エンジン始動要求時t1までのEV走行では第2クラッチ7をスリップ零の締結状態とし、エンジン始動要求時t1以後において第2クラッチ7の前記スリップ回転増大を実行すべく入力側回転数目標値tNc2iを増大させて第2クラッチ7をスリップ制御することとなる。
かかる構成によれば、EV走行中に第2クラッチ7が締結状態を保つため、その早期劣化や、油温上昇や、EV走行性能の低下を回避することができる。
図4に示す第2クラッチ制御モード決定プログラムは、図3におけるステップS52をステップS61に置換したもので、このステップS61においては、エンジン始動要求予測フラグfCL1ESTをチェックする。
ただし、エンジン始動要求予測フラグfCL1ESTは、図2のステップS4で設定する第1クラッチ制御モードフラグfCL1が1(第1クラッチ締結モード)となるエンジン始動要求時よりも前にエンジン始動要求を予測するものとし、これが実現されるよう、上記したバッテリ蓄電状態SOCに関する設定値および車速VSPに関する設定値をそれぞれ決定する。
ステップS61でエンジン始動要求予測フラグfCL1ESTが1と判定するときは、つまり、EV走行からHEV走行への切り替え要求(エンジン始動要求)が予測されるときは、ステップS54において第2クラッチ制御モードCL2MODEを2(第2クラッチスリップモード)とする。
そして、この入力側回転数目標値tNc2iが実線で示す値(図15に示すと同じ値)になったとき以後、入力側回転数目標値tNc2iは図15に示すと同様に経時変化される。
また、エンジン始動要求時t1よりも前のエンジン始動要求予測時t0より第2クラッチ7のスリップ制御を開始させるから、エンジン始動要求時t1よりも前から、第2クラッチ7をスリップさせておくべく第2クラッチ7をスリップ制御(目標スリップ回転数=50rpm)することとなり、
エンジン始動要求時t1に至ってから締結状態の第2クラッチ7をスリップ状態へ移行させる場合に比べ、制御の応答性を高めて前記の作用効果を速やかに達成することができる。
この場合、第2クラッチ7のスリップ増大によりモータ/ジェネレータ1に対する負荷が減少するため、第1クラッチ入力側回転数(エンジン回転数Ne)のエンジン始動時における立ち上がりを、A5に示すごとく、一点鎖線で示した経時変化(図14におけると同じもの)よりも急速なものとなし得て、エンジン始動を速やかに完遂させることができる。
かかる制御によれば、バッテリ蓄電状態SOCの低下でモータ/ジェネレータ1のエンジン始動用モータトルクTengstを小さくせざるを得ない場合においても、第2クラッチ7の伝達トルク容量低下によるスリップ増大で、エンジン始動用モータトルクTengstが大きい時と同様な短時間でエンジンを始動させることができる。
かかる制御によれば、車両の要求負荷(アクセル開度APO)が大きくて目標駆動力tTdが大きい場合においても、第2クラッチ7の伝達トルク容量低下によるスリップ増大で、車両の要求負荷(アクセル開度APO)が小さい時と同様な短時間でエンジンを始動させることができ、車両のアクセル応答性の改善を望み得る。
2 エンジン
3L,3R 左右駆動車輪
4 自動変速機
5 モータ/ジェネレータ軸
6 第1クラッチ
7 第2クラッチ
8 終減速機
11 アクセル開度センサ
12 車速センサ
13 第2クラッチ入力側回転センサ
14 第2クラッチ出力側回転センサ
15 エンジン回転センサ(第1クラッチ入力側回転センサ)
16 第2クラッチ作動油温センサ
20 統合コントローラ
21 バッテリ
22 インバータ
23 バッテリコントローラ
24 エンジンコントローラ
25 モータ/ジェネレータコントローラ
26 クラッチコントローラ
27 変速機コントローラ
31 フィードフォワード補償演算部
32 第2クラッチ出力側回転数目標値演算部
33 第2クラッチ出力側回転数規範値演算部
34 第2クラッチ出力側回転数偏差演算部
35 第2クラッチ伝達トルク容量補正値演算部
36 最終クラッチ伝達トルク容量目標値演算部
Claims (9)
- 動力源としてエンジンおよびモータ/ジェネレータを具え、これらエンジンおよびモータ/ジェネレータ間に伝達トルク容量を変更可能な第1クラッチを介在させ、モータ/ジェネレータおよび駆動車輪間に伝達トルク容量を変更可能な第2クラッチを介在させ、
エンジンを停止させ、第1クラッチを解放すると共に第2クラッチを締結することによりモータ/ジェネレータからの動力のみによる電気走行モードを選択可能で、第1クラッチおよび第2クラッチを共に締結することによりエンジンおよびモータ/ジェネレータの双方からの動力によるハイブリッド走行モードを選択可能なハイブリッド車両において、
運転者による車両の運転操作や、車両の走行状態から、前記第2クラッチの駆動車輪側における出力側回転数の目標値を演算する第2クラッチ出力側回転数目標値演算手段と、
前記第2クラッチの出力側回転数を検出する第2クラッチ出力側回転数検出手段と、
これら第2クラッチ出力側回転数目標値および第2クラッチ出力側回転数検出値間における第2クラッチ出力側回転数偏差を低下させる前記第2クラッチの伝達トルク容量目標値を演算する第2クラッチ伝達トルク容量目標値演算手段と、
前記第2クラッチをその伝達トルク容量が、前記第2クラッチ伝達トルク容量目標値となるよう締結制御する第2クラッチ伝達トルク容量制御手段と、
運転者による車両の運転操作や、車両の走行状態から、前記第2クラッチのモータ/ジェネレータ側における入力側回転数の目標値を演算する第2クラッチ入力側回転数目標値演算手段と、
前記第2クラッチの入力側回転数を検出する第2クラッチ入力側回転数検出手段と、
これら第2クラッチ入力側回転数目標値および第2クラッチ入力側回転数検出値間における第2クラッチ入力側回転数偏差を低下させる前記モータ/ジェネレータの出力トルク目標値を演算するモータ/ジェネレータ出力トルク目標値演算手段と、
前記モータ/ジェネレータをその出力トルクが、前記モータ/ジェネレータ出力トルク目標値となるよう駆動制御するモータ/ジェネレータ出力トルク制御手段とを具え、
第1クラッチ締結制御手段による前記第1クラッチの締結を介したモータ/ジェネレータによるエンジン始動時に、前記第2クラッチの入出力間スリップ回転が、エンジン始動前の前記第2クラッチ出力側回転数目標値および第2クラッチ入力側回転数目標値間におけるスリップ回転目標値よりも大きくなるよう構成したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1に記載のエンジン始動時クラッチ締結制御装置において、
前記第2クラッチのスリップ回転増大は、前記第2クラッチ入力側回転数目標値演算手段がエンジン始動時に、前記演算により求めた第2クラッチ入力側回転数目標値を増大させることにより実現するものであることを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1または2に記載のエンジン始動時クラッチ締結制御装置において、
前記第2クラッチのスリップ回転増大量を、前記モータ/ジェネレータのエンジン始動用モータトルクが大きいほど小さく設定したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1〜3のいずれか1項に記載のエンジン始動時クラッチ締結制御装置において、
前記第1クラッチを解放させた電気走行モードで前記第2クラッチをスリップさせておくべく第2クラッチをスリップ制御するよう構成したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1〜3のいずれか1項に記載のエンジン始動時クラッチ締結制御装置において、
前記第1クラッチを解放させた電気走行モードでは前記第2クラッチをスリップ零の締結状態とし、第1クラッチの締結を介しモータ/ジェネレータによりエンジンを始動させて行う電気走行モードからハイブリッド走行モードへの移行時に第2クラッチの前記スリップ回転増大を実行すべく第2クラッチをスリップ制御するよう構成したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1〜3のいずれか1項に記載のエンジン始動時クラッチ締結制御装置において、
前記モータ/ジェネレータ用バッテリのバッテリ蓄電状態や車両走行状態を基に、第1クラッチの締結を介しモータ/ジェネレータによりエンジンを始動させて行う電気走行モードからハイブリッド走行モードへの移行要求が発せられるのを事前に予測し、該予測がなされるまでの間は前記第2クラッチをスリップ零の締結状態とし、該予測がなされた時より第2クラッチの前記スリップ回転増大を実行すべく第2クラッチをスリップ制御するよう構成したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項1〜6のいずれか1項に記載のエンジン始動時クラッチ締結制御装置において、
前記第2クラッチ伝達トルク容量目標値演算手段がエンジン始動時に、前記演算により求めた第2クラッチの伝達トルク容量目標値を減少させるものであることを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項7に記載のエンジン始動時クラッチ締結制御装置において、
前記第2クラッチの伝達トルク容量目標値の減少量を、前記モータ/ジェネレータのエンジン始動用モータトルクが小さいほど大きく設定したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。 - 請求項7または8に記載のエンジン始動時クラッチ締結制御装置において、
前記第2クラッチの伝達トルク容量目標値の減少量を、運転者による車両の要求負荷が大きいほど大きく設定したことを特徴とするハイブリッド車両のエンジン始動時クラッチ締結制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006164631A JP4396665B2 (ja) | 2006-06-14 | 2006-06-14 | ハイブリッド車両のエンジン始動時クラッチ締結制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006164631A JP4396665B2 (ja) | 2006-06-14 | 2006-06-14 | ハイブリッド車両のエンジン始動時クラッチ締結制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007331534A JP2007331534A (ja) | 2007-12-27 |
| JP4396665B2 true JP4396665B2 (ja) | 2010-01-13 |
Family
ID=38931420
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006164631A Expired - Fee Related JP4396665B2 (ja) | 2006-06-14 | 2006-06-14 | ハイブリッド車両のエンジン始動時クラッチ締結制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4396665B2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5309676B2 (ja) * | 2008-04-25 | 2013-10-09 | 日産自動車株式会社 | 車両の発進制御装置 |
| JP5200734B2 (ja) * | 2008-07-29 | 2013-06-05 | 日産自動車株式会社 | 車両のクラッチ制御装置 |
| JP5195218B2 (ja) * | 2008-09-22 | 2013-05-08 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2010188785A (ja) * | 2009-02-16 | 2010-09-02 | Nissan Motor Co Ltd | ハイブリッド車両のクラッチ制御装置およびクラッチ制御方法 |
| JP2010201962A (ja) * | 2009-02-27 | 2010-09-16 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| KR101491939B1 (ko) * | 2010-10-26 | 2015-02-23 | 닛산 지도우샤 가부시키가이샤 | 하이브리드 차량의 제어 장치 및 제어 방법 |
| JP2012091620A (ja) * | 2010-10-26 | 2012-05-17 | Nissan Motor Co Ltd | ハイブリッド車両のエンジン始動制御装置 |
| JP5799493B2 (ja) * | 2010-10-26 | 2015-10-28 | 日産自動車株式会社 | ハイブリッド車両のモード切り替え時モータ回転数制御装置 |
| JP5696495B2 (ja) * | 2011-01-21 | 2015-04-08 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6360653B2 (ja) * | 2012-06-06 | 2018-07-18 | 日産自動車株式会社 | 車両の駆動装置 |
| JP5906142B2 (ja) * | 2012-06-25 | 2016-04-20 | 本田技研工業株式会社 | ハイブリッド車両の制御装置及び制御方法 |
| JP6044257B2 (ja) * | 2012-10-19 | 2016-12-14 | 日産自動車株式会社 | クラッチ制御装置 |
| US9321456B2 (en) | 2012-12-26 | 2016-04-26 | Nissan Motor Co., Ltd. | Hybrid vehicle control device |
| JP6004010B2 (ja) * | 2012-12-26 | 2016-10-05 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6060802B2 (ja) * | 2013-04-30 | 2017-01-18 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP7458434B2 (ja) * | 2022-03-29 | 2024-03-29 | 本田技研工業株式会社 | 移動体、及び移動体制御方法 |
-
2006
- 2006-06-14 JP JP2006164631A patent/JP4396665B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007331534A (ja) | 2007-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4396665B2 (ja) | ハイブリッド車両のエンジン始動時クラッチ締結制御装置 | |
| JP4797878B2 (ja) | ハイブリッド車両の電気走行制御装置 | |
| JP4396661B2 (ja) | ハイブリッド車両のクラッチ締結制御装置 | |
| US7758467B2 (en) | Hybrid vehicle control apparatus | |
| JP5679072B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4816291B2 (ja) | ハイブリッド車両のモータロック防止装置 | |
| JP2007314066A (ja) | ハイブリッド車両のクラッチ締結制御装置 | |
| JP4492593B2 (ja) | ハイブリッド車両のモータ駆動制御装置 | |
| JP5418690B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5141305B2 (ja) | ハイブリッド車両の制御装置 | |
| JP4389915B2 (ja) | ハイブリッド車両の降坂路走行制御装置 | |
| JP5928576B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5109467B2 (ja) | ハイブリッド車両の駆動制御装置 | |
| US20130297128A1 (en) | Hybrid vehicle engine start control device | |
| JP4949290B2 (ja) | 電動車両の駆動力制御装置 | |
| JP2007069804A (ja) | ハイブリッド車両のエンジン始動応答改善装置 | |
| JP2007099141A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP2007126091A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP5354046B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2012086738A (ja) | ハイブリッド車両のモード切り替え制御装置 | |
| JP2007069817A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP5407328B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2007261395A (ja) | ハイブリッド車両のエンジン始動制御装置 | |
| JP5151702B2 (ja) | 複合ブレーキの協調制御装置 | |
| JP5725087B2 (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090929 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4396665 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121030 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131030 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |