JP4391925B2 - 原子間力顕微鏡 - Google Patents
原子間力顕微鏡 Download PDFInfo
- Publication number
- JP4391925B2 JP4391925B2 JP2004342494A JP2004342494A JP4391925B2 JP 4391925 B2 JP4391925 B2 JP 4391925B2 JP 2004342494 A JP2004342494 A JP 2004342494A JP 2004342494 A JP2004342494 A JP 2004342494A JP 4391925 B2 JP4391925 B2 JP 4391925B2
- Authority
- JP
- Japan
- Prior art keywords
- cantilever
- vibration
- sample
- glass plate
- liquid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000523 sample Substances 0.000 claims description 79
- 239000011521 glass Substances 0.000 claims description 61
- 239000007788 liquid Substances 0.000 claims description 37
- 230000005540 biological transmission Effects 0.000 claims description 31
- 238000001514 detection method Methods 0.000 claims description 21
- 230000005284 excitation Effects 0.000 claims description 18
- 239000011810 insulating material Substances 0.000 claims description 15
- 239000011345 viscous material Substances 0.000 claims description 7
- 238000006073 displacement reaction Methods 0.000 description 23
- 230000003287 optical effect Effects 0.000 description 12
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 8
- 239000012472 biological sample Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000002238 attenuated effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000005871 repellent Substances 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 239000003153 chemical reaction reagent Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000004651 near-field scanning optical microscopy Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002940 repellent Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000005641 tunneling Effects 0.000 description 1
Images





Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Description
Claims (5)
- 液体中の試料を観察するための原子間力顕微鏡であり、
試料を保持する試料保持部と、
自由端に探針を持つ弾性変形可能なカンチレバーと、
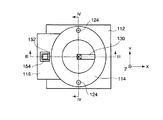
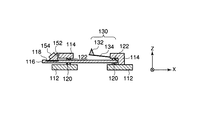
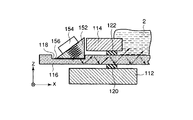
カンチレバーと液体を保持するステージとを備えており、ステージは、液体を保持するガラス板と、カンチレバーを保持するカンチレバーホルダーと、カンチレバーホルダーを支持するステージベースと、ガラス板とカンチレバーホルダーの間とガラス板とステージベースの間に配置された振動絶縁材とを有し、カンチレバーホルダーとステージベースは振動絶縁材を介してガラス板を保持しており、試料はガラス板に保持された液体の中に置かれ、カンチレバーは試料に正対するように液体の中に置かれ、さらに、
ガラス板に設けられ、ガラス板と液体を介してカンチレバーを振動させるための励振手段と、
試料保持部をXY方向に走査するためのXY走査手段と、
カンチレバーの自由端の振動を光学的に検出するための振動検出手段と、
XY走査手段・振動検出手段からの情報に基づいて試料情報を取得するための情報取得手段とを備えている、原子間力顕微鏡。 - 請求項1において、振動検出手段によって得られる情報に基づいて試料保持部をZ方向に走査するためのZ走査手段をさらに備え、情報取得手段はXY走査手段・Z走査手段からの情報に基づいて試料情報を取得する、原子間力顕微鏡。
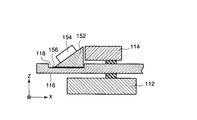
- 請求項1または請求項2において、励振手段は、電気信号の供給に応じて振動を生成する振動子と、振動子の振動をガラス板に伝達する振動伝達ブロックとを備えている、原子間力顕微鏡。
- 請求項3において、振動伝達ブロックは粘性材を介してガラス板に取り付けられている、原子間力顕微鏡。
- 請求項3または請求項4において、振動伝達ブロックにおける振動の伝達方向は、ガラス板の液体を保持する面に対して30度から60度の角度をなしている、原子間力顕微鏡。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004342494A JP4391925B2 (ja) | 2004-11-26 | 2004-11-26 | 原子間力顕微鏡 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004342494A JP4391925B2 (ja) | 2004-11-26 | 2004-11-26 | 原子間力顕微鏡 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006153574A JP2006153574A (ja) | 2006-06-15 |
| JP2006153574A5 JP2006153574A5 (ja) | 2007-11-29 |
| JP4391925B2 true JP4391925B2 (ja) | 2009-12-24 |
Family
ID=36632074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004342494A Expired - Fee Related JP4391925B2 (ja) | 2004-11-26 | 2004-11-26 | 原子間力顕微鏡 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4391925B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008122325A (ja) * | 2006-11-15 | 2008-05-29 | Jeol Ltd | 走査プローブ顕微鏡 |
| JP2008134190A (ja) | 2006-11-29 | 2008-06-12 | Olympus Corp | カンチレバーホルダーおよびこれを備えた走査型プローブ顕微鏡 |
| JP4910949B2 (ja) * | 2007-08-29 | 2012-04-04 | 株式会社島津製作所 | 液中試料の分析方法 |
| JP5185723B2 (ja) * | 2008-08-01 | 2013-04-17 | オリンパス株式会社 | 原子間力顕微鏡 |
| KR101065981B1 (ko) | 2009-05-20 | 2011-09-19 | 인하대학교 산학협력단 | 소리굽쇠-주사탐침 결합 진동계 |
| WO2011016256A1 (ja) | 2009-08-06 | 2011-02-10 | 国立大学法人 金沢大学 | カンチレバー励振装置及び走査型プローブ顕微鏡 |
| KR101097768B1 (ko) | 2009-11-30 | 2011-12-23 | 한국표준과학연구원 | 소리굽쇠 진동을 이용한 마이크로 힘센서 및 마이크로 힘 측정방법 |
| FR3054667B1 (fr) * | 2016-07-26 | 2020-07-10 | Universite De Bourgogne | Dispositif d'analyse volumetrique d'un echantillon organique ou inorganique |
| WO2020044548A1 (ja) * | 2018-08-31 | 2020-03-05 | オリンパス株式会社 | 原子間力顕微鏡 |
-
2004
- 2004-11-26 JP JP2004342494A patent/JP4391925B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006153574A (ja) | 2006-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8322220B2 (en) | Non-destructive wafer-scale sub-surface ultrasonic microscopy employing near field AFM detection | |
| JP2730673B2 (ja) | 超音波を導入するカンチレバーを用いた物性の計測方法および装置 | |
| US5481908A (en) | Resonance contact scanning force microscope | |
| JP2002107285A (ja) | 磁気力顕微鏡 | |
| JPH0821846A (ja) | 試料測定用プローブ装置 | |
| JP4391925B2 (ja) | 原子間力顕微鏡 | |
| JP4688643B2 (ja) | 加振型カンチレバーホルダ及び走査型プローブ顕微鏡 | |
| JP2004198427A (ja) | プローブ装置 | |
| US5681987A (en) | Resonance contact scanning force microscope | |
| JP4446929B2 (ja) | 走査型プローブ顕微鏡用カンチレバーホルダおよびそれを用いた走査型プローブ顕微鏡 | |
| JP2000146804A (ja) | 近視野ゾンデと検査対象試料表面の間の距離を決定する方法および近視野顕微鏡 | |
| JP2007171021A (ja) | 走査プローブ装置及び走査プローブ装置用の駆動ステージ | |
| JP5585965B2 (ja) | カンチレバー励振装置及び走査型プローブ顕微鏡 | |
| JP4474556B2 (ja) | 走査型プローブ顕微鏡 | |
| JP2003329565A (ja) | 走査プローブ顕微鏡 | |
| JP4816414B2 (ja) | 走査型プローブ顕微鏡 | |
| JP2004156958A (ja) | 走査型プローブ顕微鏡 | |
| JPH0792464B2 (ja) | 原子間力顕微鏡における超音波振動検出方法及び原子間力顕微鏡における試料観察方法 | |
| JP2004156959A (ja) | 走査型プローブ顕微鏡 | |
| JP2010190590A (ja) | 走査プローブ顕微鏡及びその動作方法 | |
| JPH10267950A (ja) | 横励振摩擦力顕微鏡 | |
| JPH10160742A (ja) | 走査型プローブ顕微鏡の試料ホルダー | |
| JPH07174767A (ja) | 走査型プローブ顕微鏡 | |
| JP2002082037A (ja) | 原子間力顕微鏡用光てこ光学系 | |
| JP3859275B2 (ja) | 走査型プローブ顕微鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071017 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071017 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090915 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091008 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121016 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4391925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121016 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131016 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |