JP4254635B2 - 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 - Google Patents
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 Download PDFInfo
- Publication number
- JP4254635B2 JP4254635B2 JP2004198432A JP2004198432A JP4254635B2 JP 4254635 B2 JP4254635 B2 JP 4254635B2 JP 2004198432 A JP2004198432 A JP 2004198432A JP 2004198432 A JP2004198432 A JP 2004198432A JP 4254635 B2 JP4254635 B2 JP 4254635B2
- Authority
- JP
- Japan
- Prior art keywords
- power
- output
- internal combustion
- combustion engine
- rotational speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
駆動軸に動力を出力可能な動力出力装置であって、
内燃機関と、
該内燃機関の出力軸と前記駆動軸とに接続され、電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、
前記駆動軸に動力を入出力可能な電動機と、
前記電力動力入出力手段および前記電動機と電力をやり取り可能な蓄電手段と、
操作者の操作に基づいて前記駆動軸の要求駆動力を設定する要求駆動力設定手段と、
該設定された要求駆動力に基づいて前記内燃機関の目標動力を設定する目標動力設定手段と、
通常時には前記設定された目標動力が前記内燃機関から出力されると共に前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動機とを駆動制御する通常制御を行ない、少なくとも前記目標動力の符号が変化するときには該変化の前後で前記内燃機関の回転数が維持されながら前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動
機とを駆動制御する回転数維持制御を行なう駆動制御手段と
を備えることを要旨とする。
の入力制限の範囲内となるよう前記下限回転数を設定する手段であるものとすることもできる。
上述した各態様のいずれかの本発明の動力出力装置、即ち、基本的には、駆動軸に動力を出力可能な動力出力装置であって、内燃機関と、該内燃機関の出力軸と前記駆動軸とに接続され電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、前記駆動軸に動力を入出力可能な電動機と、前記電力動力入出力手段および前記電動機と電力をやり取り可能な蓄電手段と、操作者の操作に基づいて前記駆動軸の要求駆動力を設定する要求駆動力設定手段と、該設定された要求駆動力に基づいて前記内燃機関の目標動力を設定する目標動力設定手段と、通常時には前記設定された目標動力が前記内燃機関から出力されると共に前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動機とを駆動制御する通常制御を行ない、少なくとも前記目標動力の符号が変化するときには該変化の前後で前記内燃機関の回転数が維持されながら前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動機とを駆動制御する回転数維持制御を行なう駆動制御手段とを備える動力出力装置を搭載し、前記駆動軸に車軸が接続されて走行する
ことを要旨とする。
内燃機関と、該内燃機関の出力軸と前記駆動軸とに接続され電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、前記駆動軸に動力を入出力可能な電動機と、前記電力動力入出力手段および前記電動機と電力をやり取り可能な蓄電手段と、を備える動力出力装置の制御方法であって、
(a)操作者の操作に基づいて前記駆動軸の要求駆動力を設定し、
(b)該設定された要求駆動力に基づいて前記内燃機関の目標動力を設定し、
(c)通常時には前記設定された目標動力が前記内燃機関から出力されると共に前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動機とを駆動制御する通常制御を行ない、少なくとも前記目標動力の符号が変化するときには該変化の前後で前記内燃機関の回転数が維持されながら前記要求駆動力に基づく駆動力が前記駆動軸に出力されるよう該内燃機関と前記電力動力入出力手段と前記電動機とを駆動制御する回転数維持制御を行なう
ことを要旨とする。
MG2と、動力出力装置全体をコントロールするハイブリッド用電子制御ユニット70とを備える。
Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。なお、バッテリECU52では、バッテリ50を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)も演算している。
ジションセンサ82によりBレンジが検知されているときに所定時間毎(例えば、8msec毎)に繰り返し実行される。
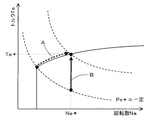
8)。エンジン要求パワーPe*が値0未満でない(値0以上)と判定されたときには、設定されたエンジン要求パワーPe*に基づいてエンジン22の運転ポイントとしての目標回転数Ne*と目標トルクTe*とを設定する(ステップS110)。この設定は、エンジン22を効率よく動作させる動作ラインとエンジン要求パワーPe*とに基づいて目標回転数Ne*と目標トルクTe*とを設定することにより行なわれる。エンジン22の動作ラインの一例および目標回転数Ne*と目標トルクTe*とを設定する様子を図5に示す。図示するように、目標回転数Ne*と目標トルクTe*は、動作ラインとエンジン要求パワーPe*(Ne*×Te*)が一定の曲線との交点により求めることができる。
Tm1*=前回Tm1*+KP(Nm1*−Nm1)+KI∫(Nm1*−Nm1)dt (2)
(5)によりモータMG2から出力してもよいトルクの下限,上限としてのトルク制限Tm2min,Tm2maxを計算し(ステップS120)、仮モータトルクTm2tmpと計算したトルク制限Tm2maxとのうち小さい方を変数Tに設定し、この変数Tとトルク制限Tm2minとのうち大きい方をモータMG2のトルク指令Tm2*に設定する(ステップS122)。これにより、モータMG2のトルク指令Tm2*をバッテリ50の入出力制限Win,Woutの範囲内で制限したトルクとして設定することができる。
Tm2min=(Win−Tm1*・Nm1)/Nm2 (4)
Tm2max=(Wout−Tm1*・Nm1)/Nm2 (5)
テリ50が入力制限Winの範囲を超える過大な電力により充電されるのを抑制することができる。
リッド自動車20Bは、第1実施例のハイブリッド自動車20と同一のハード構成により構成されており、図2のBレンジ操作時駆動制御ルーチンに代えて図10のBレンジ操作時駆動制御ルーチンを実行する点が異なる。したがって、第2実施例のハイブリッド自動車20Bでは、第1実施例のハイブリッド自動車20の符号を用いて説明し、その図示は省略する。
転数Neminをもってエンジン22の目標回転数Ne*にガードを掛けるから、エンジン要求パワーPe*の符号の変化の前後でアクセルペダル83の操作に基づいて運転者が考えるエンジン22の動きとは異なる動きとなるのを防止することができる。この結果、運転フィーリングを向上させることができる。もとより、エンジン要求パワーPe*が負の値のときにエンジン22の目標回転数Ne*を下限回転数Neminでガードを掛ける際、エンジン22は燃料カットを維持しながら下限回転数Neminで運転するものとしエンジン22から出力される不足分のパワーはモータMG2から出力するから、要求トルクTr*を駆動軸としてのリングギヤ軸32aに出力することができる。しかも、バッテリ50の出力制限Woutが所定値Wref2以下のときには、下限回転数Neminによるエンジン22の目標回転数Ne*のガード処理は行なわないから、バッテリ50が出力制限Woutの範囲を超えて過大な電力により放電されるのを抑制することができる。
Claims (12)
- 自動車に搭載され、車軸に接続された駆動軸に動力を出力可能な動力出力装置であって、
内燃機関と、
該内燃機関の出力軸と前記駆動軸とに接続され、電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、
前記駆動軸に動力を入出力可能な電動機と、
前記電力動力入出力手段および前記電動機と電力をやり取り可能な蓄電手段と、
操作者の操作に基づいて前記駆動軸の要求駆動力を設定する要求駆動力設定手段と、
該設定された要求駆動力に基づいて前記内燃機関の目標動力を設定する目標動力設定手段と、
車速に基づいて前記内燃機関の下限回転数を設定する下限回転数設定手段と、
前記設定された目標動力が負でないとき、前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数以上のときには該運転ポイントで前記内燃機関が運転されると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力動力入出力手段と前記電動機とを制御し前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数未満のときには該下限回転数で前記内燃機関が運転されると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力動力入出力手段と前記電動機とを制御し、前記設定された目標動力が負のとき、前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数以上のときには燃料カットを伴って該目標回転数で前記内燃機関が運転されるよう該内燃機関と前記電力動力入出力手段とを制御すると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記電動機を制御し前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数未満のときには前記内燃機関から負でない所定動力の出力を伴って該下限回転数で該内燃機関が運転されるよう該内燃機関と前記電力動力入出力手段とを制御すると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記電動機を制御する制御手段と
を備える動力出力装置。 - 前記下限回転数設定手段は、車速が高いほど高くなる傾向で前記下限回転数を設定する手段である請求項1記載の動力出力装置。
- 前記制御手段は、前記蓄電手段の入力制限の範囲内で前記内燃機関と前記電力動力入出力手段と前記電動機とを制御する手段である請求項1または2記載の動力出力装置。
- 前記制御手段は、前記目標回転数が前記下限回転数未満のときに該下限回転数で前記内燃機関を運転すると、前記蓄電手段に入力制限を超える電力が入力されるときには、前記目標回転数が前記下限回転数未満に拘わらず該目標回転数で前記内燃機関が運転されるよう制御する手段である請求項3記載の動力出力装置。
- 前記下限回転数設定手段は、前記蓄電手段の入力制限の範囲内となるよう前記下限回転数を設定する手段である請求項1または2記載の動力出力装置。
- 前記所定動力は、前記内燃機関から出力可能な正の動力のうち最も小さい動力である請求項1ないし5いずれか1項に記載の動力出力装置。
- 前記制御手段による制御は、操作者の操作に基づいて行なわれる制御である請求項1ないし6いずれか1項に記載の動力出力装置。
- 前記電力動力入出力手段は、前記内燃機関の出力軸と前記駆動軸と第3の回転軸の3軸に接続され該3軸のうちのいずれか2軸に入出力される動力が決定されると残余の軸に入出力される動力が決定される3軸式動力入出力手段と、前記第3の回転軸に動力を入出力可能な発電機とを備える手段である請求項1ないし7いずれか1項に記載の動力出力装置。
- 前記電力動力入出力手段は、前記内燃機関の出力軸に取り付けられた第1の回転子と前記駆動軸に取り付けられた第2の回転子とを有し、該第1の回転子と該第2の回転子との電磁作用による電力の入出力を伴って該内燃機関からの動力の少なくとも一部を該駆動軸に出力する対回転子電動機を備える手段である請求項1ないし7いずれか1項に記載の動力出力装置。
- 請求項1ないし9いずれか1項に記載の動力出力装置を搭載し、前記駆動軸に車軸が接続されて走行する自動車。
- 前記制御手段による制御は、操作者により前記内燃機関から前記駆動軸への制動力の出力を可能とするブレーキレンジにシフト操作されたときに行なわれる制御である請求項10記載の自動車。
- 駆動軸に車軸が接続された自動車に搭載され、内燃機関と、該内燃機関の出力軸と前記駆動軸とに接続され電力と動力の入出力により該内燃機関からの動力の少なくとも一部を該駆動軸に出力可能な電力動力入出力手段と、前記駆動軸に動力を入出力可能な電動機と、前記電力動力入出力手段および前記電動機と電力をやり取り可能な蓄電手段と、を備える動力出力装置の制御方法であって、
(a)操作者の操作に基づいて前記駆動軸の要求駆動力を設定し、
(b)該設定された要求駆動力に基づいて前記内燃機関の目標動力を設定し、
(c)車速に基づいて前記内燃機関の下限回転数を設定し、
(d)前記設定された目標動力が負でないとき、前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数以上のときには該運転ポイントで前記内燃機関が運転されると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力動力入出力手段と前記電動機とを制御し前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数未満のときには該下限回転数で前記内燃機関が運転されると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記内燃機関と前記電力動力入出力手段と前記電動機とを制御し、前記設定された目標動力が負のとき、前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数以上のときには燃料カットを伴って該目標回転数で前記内燃機関が運転されるよう該内燃機関と前記電力動力入出力手段とを制御すると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記電動機を制御し前記目標動力を出力するための前記内燃機関の運転ポイントにおける目標回転数が前記設定された下限回転数未満のときには前記内燃機関から負でない所定動力の出力を伴って該下限回転数で該内燃機関が運転されるよう該内燃機関と前記電力動力入出力手段とを制御すると共に前記設定された要求駆動力に基づく駆動力が前記駆動軸に出力されるよう前記電動機を制御する
動力出力装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004198432A JP4254635B2 (ja) | 2004-07-05 | 2004-07-05 | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004198432A JP4254635B2 (ja) | 2004-07-05 | 2004-07-05 | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006020481A JP2006020481A (ja) | 2006-01-19 |
| JP4254635B2 true JP4254635B2 (ja) | 2009-04-15 |
Family
ID=35794202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004198432A Expired - Lifetime JP4254635B2 (ja) | 2004-07-05 | 2004-07-05 | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4254635B2 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4779800B2 (ja) * | 2006-05-23 | 2011-09-28 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP4165596B2 (ja) | 2006-10-18 | 2008-10-15 | トヨタ自動車株式会社 | 制駆動力制御装置 |
| JP4569566B2 (ja) * | 2006-12-18 | 2010-10-27 | トヨタ自動車株式会社 | 動力出力装置およびその制御方法並びに車両 |
| JP4222415B2 (ja) | 2006-12-19 | 2009-02-12 | トヨタ自動車株式会社 | 車両の制御装置、制御方法およびその制御方法をコンピュータで実現させるプログラムならびにそのプログラムが記録された記録媒体 |
| JP5092439B2 (ja) * | 2007-02-14 | 2012-12-05 | トヨタ自動車株式会社 | 駆動力制御装置 |
| JP4263750B2 (ja) | 2007-03-29 | 2009-05-13 | トヨタ自動車株式会社 | ハイブリッド自動車およびその制御方法 |
| JP2009001097A (ja) * | 2007-06-20 | 2009-01-08 | Toyota Motor Corp | 車両およびその制御方法 |
| JP2011201329A (ja) * | 2010-03-24 | 2011-10-13 | Toyota Motor Corp | ハイブリッド自動車およびその制御方法 |
| WO2012086061A1 (ja) * | 2010-12-24 | 2012-06-28 | トヨタ自動車株式会社 | 車両および車両用制御方法 |
| JP2013006443A (ja) * | 2011-06-22 | 2013-01-10 | Toyota Motor Corp | ハイブリッド車両の制御装置 |
| JPWO2017158960A1 (ja) * | 2016-03-16 | 2018-11-08 | オートモーティブエナジーサプライ株式会社 | ハイブリッド型電気自動車およびハイブリッド型電気自動車用のリチウムイオン二次電池の選定方法 |
-
2004
- 2004-07-05 JP JP2004198432A patent/JP4254635B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006020481A (ja) | 2006-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4086018B2 (ja) | ハイブリッド車およびその制御方法並びに動力出力装置 | |
| JP4192873B2 (ja) | 動力出力装置およびこれを搭載する自動車 | |
| JP4479458B2 (ja) | 車両およびその制御方法 | |
| JP2006094626A (ja) | ハイブリッド車およびその制御方法 | |
| JP4254635B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4222332B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4055771B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4176080B2 (ja) | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 | |
| JP4001119B2 (ja) | 駆動装置およびこれを搭載するハイブリッド自動車並びに駆動装置の制御方法、内燃機関の制動装置 | |
| JP2005151620A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4103794B2 (ja) | 自動車および自動車の制御装置 | |
| JP2005051832A (ja) | 車両およびその制御方法 | |
| JP4365354B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2006199213A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP3998002B2 (ja) | ハイブリッド自動車およびその制御方法 | |
| JP2004343838A (ja) | 動力出力装置およびその制御方法並びに自動車 | |
| JP4067000B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2009227074A (ja) | ハイブリッド車およびその制御方法 | |
| JP4301252B2 (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP4215030B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP4345738B2 (ja) | 車両及びその制御方法 | |
| JP2007112291A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP2007137266A (ja) | ハイブリッド車およびその制御方法 | |
| JP4258519B2 (ja) | 車両およびその制御方法 | |
| JP4196961B2 (ja) | 動力出力装置およびこれを搭載する自動車並びにその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070315 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080708 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080905 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081118 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20081202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090119 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120206 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4254635 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120206 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120206 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130206 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130206 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140206 Year of fee payment: 5 |
|
| EXPY | Cancellation because of completion of term |