JP4250611B2 - 通信装置、通信パラメータ設定方法及び通信方法 - Google Patents
通信装置、通信パラメータ設定方法及び通信方法 Download PDFInfo
- Publication number
- JP4250611B2 JP4250611B2 JP2005130478A JP2005130478A JP4250611B2 JP 4250611 B2 JP4250611 B2 JP 4250611B2 JP 2005130478 A JP2005130478 A JP 2005130478A JP 2005130478 A JP2005130478 A JP 2005130478A JP 4250611 B2 JP4250611 B2 JP 4250611B2
- Authority
- JP
- Japan
- Prior art keywords
- communication
- master
- determined
- providing
- message
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title claims abstract description 423
- 238000000034 method Methods 0.000 title claims description 144
- 238000012546 transfer Methods 0.000 claims abstract description 82
- 238000012545 processing Methods 0.000 claims description 104
- 230000005540 biological transmission Effects 0.000 description 99
- 230000008569 process Effects 0.000 description 98
- 230000004044 response Effects 0.000 description 62
- 238000010586 diagram Methods 0.000 description 21
- 230000006870 function Effects 0.000 description 18
- 239000000370 acceptor Substances 0.000 description 9
- 230000004913 activation Effects 0.000 description 7
- 230000008901 benefit Effects 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 238000010129 solution processing Methods 0.000 description 2
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000007873 sieving Methods 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images




































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W28/00—Network traffic management; Network resource management
- H04W28/16—Central resource management; Negotiation of resources or communication parameters, e.g. negotiating bandwidth or QoS [Quality of Service]
- H04W28/18—Negotiating wireless communication parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L2101/00—Indexing scheme associated with group H04L61/00
- H04L2101/60—Types of network addresses
- H04L2101/618—Details of network addresses
- H04L2101/622—Layer-2 addresses, e.g. medium access control [MAC] addresses
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L61/00—Network arrangements, protocols or services for addressing or naming
- H04L61/35—Network arrangements, protocols or services for addressing or naming involving non-standard use of addresses for implementing network functionalities, e.g. coding subscription information within the address or functional addressing, i.e. assigning an address to a function
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W8/00—Network data management
- H04W8/005—Discovery of network devices, e.g. terminals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/18—Self-organising networks, e.g. ad-hoc networks or sensor networks
- H04W84/20—Master-slave selection or change arrangements
Description
また、本発明は、通信装置の制御方法であって、ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定工程と、前記決定工程において前記通信装置が前記受理装置に決定された場合、前記通信装置の識別情報と前記受理装置に決定された他の通信装置の識別情報とを前記提供装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知工程と、を有することを特徴とする。
また、本発明は、通信装置の制御方法であって、ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定工程と、前記決定工程において前記通信装置が前記受理装置に決定された場合、前記提供装置に決定された他の通信装置の識別情報を前記受理装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知工程と、を有することを特徴とする。
また、本発明は、通信装置であって、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する管理装置を決定する第1の決定手段と、前記第1の決定手段によって前記通信装置が前記管理装置に決定された場合、ネットワーク上に存在する通信装置の能力を示す情報に基づいて、前記提供装置と前記受理装置とを決定する第2の決定手段と、前記第2の決定手段によって決定された前記提供装置又は前記受理装置に前記通信パラメータの転送方向を通知する通知手段と、を有し、前記通知手段により通知された転送方向に従って前記提供装置から前記受理装置へ前記通信パラメータが転送され、転送された前記通信パラメータが前記受理装置に設定されることを特徴とする。
また、本発明は、通信装置であって、通信パラメータ設定時に他の機器との間で通信パラメータ設定用のネットワークを形成する手段と、他のネットワークを形成するための通信パラメータを提供する提供装置の決定を行う決定装置を決定する手段と、前記通信装置が前記決定装置に決定された場合に、他の機器の情報を収集する手段と、収集した情報に基づいて、前記提供装置を決定する手段と、を有し、前記提供装置から他の機器に前記他のネットワークを形成するための通信パラメータが通知されることを特徴とする。
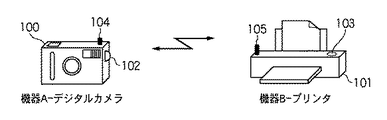
図1は、第1の実施形態における無線LANの構成の一例を示す図である。図1に示すように、無線通信機器AはIEEE802.11準拠の無線通信機能104を有するデジタルカメラ100であり、ユーザが通信パラメータ設定起動ボタン102を押下することにより通信パラメータ設定モードのネットワークを構成することが可能である。また、無線通信機器BはIEEE802.11準拠の無線通信機能105を有するプリンタ101であり、機器Aと同様に、ユーザが通信パラメータ設定起動ボタン103を押下することにより通信パラメータ設定モードのネットワークを構成することが可能である。
ここでは、機器Aと機器Bの間で通信パラメータ設定用ネットワークをアドホック接続によって形成する処理を行う。
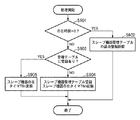
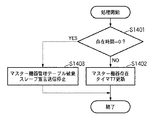
ここでは、機器Aと機器Bの間でどちらの機器が通信パラメータ設定用ネットワークのマスター機器となり、どちらの機器がスレーブ機器となるかを決定する処理と、各機器は相手が同一ネットワーク上に存在するか否かの監視処理を継続的に行う。
ここでは、ステップ402で決定されたマスター機器が同一ネットワーク上に存在するスレーブ機器が所有している機器能力属性値をスレーブ機器に問い合わせて収集する処理を行う。
ここでは、ステップ403でマスター機器が収集した各スレーブ機器の機器能力属性値と自マスター機器の機器能力属性値とを比較し、どの機器からどの機器へ通信パラメータの転送を行うかをマスター機器が決定し、かつ、各スレーブ機器に対して通信パラメータの転送を行う上で必要となる、あて先や発信元情報などの指示を転送する。
ここでは、ステップ404で決定された通信パラメータの転送方向に従って実際に通信パラメータ提供能力を持つ機器から通信パラメータ受理能力を持つ機器へ通信パラメータを転送する。
ここでは、ステップ405の転送終了をきっかけに通信パラメータ設定ネットワークを終了するために必要となる処理を行う。尚、通信パラメータ設定ネットワーク終了ステップ406が終了した後は、通信パラメータ転送ステップ405において転送された通信パラメータを用いて新たなネットワークを構築することになる。
次に、図面を参照しながら本発明に係る第2の実施形態について詳細に説明する。第1の実施形態では、2台の機器間における自動通信パラメータ設定について説明したが、第2の実施形態では複数の機器間における自動通信パラメータ設定の特徴的な部分について説明する。
第1及び第2の実施形態では、無線通信として、無線LANを例に挙げて説明したが、例えばBluetooth(登録商標)、WirelessUSB、Wireless1394、UWB、WiMAXなどの他の無線通信方式に本発明を適用することも可能である。
Claims (20)
- 通信装置であって、
ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定手段と、
前記決定手段によって前記通信装置が前記受理装置に決定された場合、前記通信装置の識別情報と前記受理装置に決定された他の通信装置の識別情報とを前記提供装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知手段と、
を有することを特徴とする通信装置。 - 前記複数の他の通信装置の能力を示す情報を収集する収集手段を更に有し、
前記決定手段は、前記収集した情報に基づいて前記通信パラメータを提供する提供装置と前記通信パラメータを受理する受理装置とを決定することを特徴とする請求項1記載の通信装置。 - 前記通知手段は、前記決定手段によって前記通信装置が前記提供装置に決定された場合、前記通信装置の識別情報を前記受理装置に決定された他の通信装置に通知することを特徴とする請求項1又は2記載の通信装置。
- 前記通知手段は、前記決定手段によって前記通信装置が前記受理装置に決定された場合、前記提供装置に決定された他の通信装置の識別情報を前記受理装置に決定された他の通信装置に通知することを特徴とする請求項1乃至3の何れか1項に記載の通信装置。
- 前記決定手段で2台以上の通信装置を前記提供装置と決定した場合、転送方向エラーを示すメッセージ情報を表示させる表示制御手段を有することを特徴とする請求項1乃至4の何れか1項に記載の通信装置。
- 通信装置の制御方法であって、
ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定工程と、
前記決定工程において前記通信装置が前記受理装置に決定された場合、前記通信装置の識別情報と前記受理装置に決定された他の通信装置の識別情報とを前記提供装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知工程と、
を有することを特徴とする通信装置の制御方法。 - 通信装置であって、
ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定手段と、
前記決定手段によって前記通信装置が前記受理装置に決定された場合、前記提供装置に決定された他の通信装置の識別情報を前記受理装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知手段と、
を有することを特徴とする通信装置。 - 前記通知手段は、前記決定手段により前記通信装置が前記提供装置に決定された場合、前記通信装置の識別情報を前記受理装置に決定された他の通信装置に通知することを特徴とする請求項7記載の通信装置。
- 通信装置の制御方法であって、
ネットワーク上に存在する複数の他の通信装置の能力を示す情報に基づいて、他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する決定工程と、
前記決定工程において前記通信装置が前記受理装置に決定された場合、前記提供装置に決定された他の通信装置の識別情報を前記受理装置に決定された他の通信装置へ通知することにより、前記通信パラメータの転送方向を通知する通知工程と、
を有することを特徴とする制御方法。 - 通信パラメータ設定方法であって、
他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する通信装置を決定する第1の決定工程と、
前記第1の決定工程において決定された通信装置が、ネットワーク上に存在する通信装置の能力を示す情報に基づいて、前記提供装置と前記受理装置とを決定する第2の決定工程と、
前記第2の決定工程で決定した前記提供装置又は前記受理装置に前記通信パラメータの転送方向を通知する通知工程と、
を有し、
前記通知工程で通知された転送方向に従って前記提供装置から前記受理装置へ前記通信パラメータが転送され、転送された前記通信パラメータが前記受理装置に設定されることを特徴とする通信パラメータ設定方法。 - 前記提供装置は、前記受理装置に対して認証処理を要求する工程と、前記認証処理で正しいと判断された前記受理装置に対して暗号鍵の交換を要求する工程と、前記暗号鍵を用いて前記通信パラメータを暗号化して前記受理装置に送信する工程と、
を実行し、
前記受理装置は、前記暗号鍵を用いて前記通信パラメータを復号化して記憶する工程を実行することを特徴とする請求項10記載の通信パラメータ設定方法。 - 通信装置であって、
他のネットワークを形成するための通信パラメータを提供する提供装置と該通信パラメータを受理する受理装置とを決定する管理装置を決定する第1の決定手段と、
前記第1の決定手段によって前記通信装置が前記管理装置に決定された場合、ネットワーク上に存在する通信装置の能力を示す情報に基づいて、前記提供装置と前記受理装置とを決定する第2の決定手段と、
前記第2の決定手段によって決定された前記提供装置又は前記受理装置に前記通信パラメータの転送方向を通知する通知手段と、
を有し、
前記通知手段により通知された転送方向に従って前記提供装置から前記受理装置へ前記通信パラメータが転送され、転送された前記通信パラメータが前記受理装置に設定されることを特徴とする通信装置。 - 通信方法であって、
通信パラメータ設定時に各機器で通信パラメータ設定用のネットワークを形成する工程と、
他のネットワークを形成するための通信パラメータを提供する提供装置を決定する決定装置を決定する工程と、
前記決定装置が、他の機器の情報を収集する工程と、
収集した情報に基づいて、前記提供装置を決定する工程と、
前記提供装置から他の機器に前記他のネットワークを形成するための通信パラメータを通知する工程とを実行することを特徴とする通信方法。 - 前記通信パラメータを用いて、前記他のネットワークを形成するステップを有することを特徴とする請求項13記載の通信方法。
- 前記提供装置の決定に伴い、前記提供装置から通信パラメータの提供を受ける受理装置を決定する工程と、
前記提供装置と受理装置の決定に基づいて、前記提供装置となったことを通知、もしくは、前記受理装置となったことを他の機器に通知する工程とを有することを特徴とする請求項13記載の通信方法。 - 前記提供装置に対して、受理装置の識別情報を通知する工程を有することを特徴とする請求項15記載の通信方法。
- 前記受理装置に対して、提供装置の識別情報を通知する工程を有することを特徴とする請求項15記載の通信方法。
- 通信装置であって、
通信パラメータ設定時に他の機器との間で通信パラメータ設定用のネットワークを形成する手段と、
他のネットワークを形成するための通信パラメータを提供する提供装置の決定を行う決定装置を決定する手段と、
前記通信装置が前記決定装置に決定された場合に、他の機器の情報を収集する手段と、
収集した情報に基づいて、前記提供装置を決定する手段と、
を有し、
前記提供装置から他の機器に前記他のネットワークを形成するための通信パラメータが通知されることを特徴とする通信装置。 - 請求項6又は8に記載の制御方法、もしくは請求項10又は11に記載の通信パラメータ設定方法もしくは請求項13乃至17の何れか1項に記載の通信方法をコンピュータに実行させるためのプログラム。
- 請求項19に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005130478A JP4250611B2 (ja) | 2005-04-27 | 2005-04-27 | 通信装置、通信パラメータ設定方法及び通信方法 |
| US11/409,314 US7882196B2 (en) | 2005-04-27 | 2006-04-24 | Communication apparatus, communication parameter configuration method and communication method |
| CN2006100745363A CN1855865B (zh) | 2005-04-27 | 2006-04-27 | 通信设备和通信参数配置方法 |
| KR20060038004A KR100719473B1 (ko) | 2005-04-27 | 2006-04-27 | 통신 장치, 통신 파라미터 설정 방법 및 통신 방법 |
| EP06252253.7A EP1718028B1 (en) | 2005-04-27 | 2006-04-27 | Apparatus and method for configuring communication parameters |
| CN201310556400.6A CN103686873B (zh) | 2005-04-27 | 2006-04-27 | 通信设备及其控制方法 |
| CN201310556158.2A CN103686871B (zh) | 2005-04-27 | 2006-04-27 | 通信设备以及通信方法 |
| CN201310556352.0A CN103686872B (zh) | 2005-04-27 | 2006-04-27 | 通信设备及其控制方法 |
| CN2008101080667A CN101335673B (zh) | 2005-04-27 | 2006-04-27 | 配置网络的方法 |
| EP16151360.1A EP3038324A1 (en) | 2005-04-27 | 2006-04-27 | Communication apparatus, communication parameter configuration method and communication method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005130478A JP4250611B2 (ja) | 2005-04-27 | 2005-04-27 | 通信装置、通信パラメータ設定方法及び通信方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007122795A Division JP4642807B2 (ja) | 2007-05-07 | 2007-05-07 | ネットワーク形成方法及び通信装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006311138A JP2006311138A (ja) | 2006-11-09 |
| JP2006311138A5 JP2006311138A5 (ja) | 2007-06-28 |
| JP4250611B2 true JP4250611B2 (ja) | 2009-04-08 |
Family
ID=36754133
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005130478A Active JP4250611B2 (ja) | 2005-04-27 | 2005-04-27 | 通信装置、通信パラメータ設定方法及び通信方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7882196B2 (ja) |
| EP (2) | EP1718028B1 (ja) |
| JP (1) | JP4250611B2 (ja) |
| KR (1) | KR100719473B1 (ja) |
| CN (5) | CN103686872B (ja) |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4125173B2 (ja) | 2003-04-23 | 2008-07-30 | キヤノン株式会社 | 情報処理装置の接続制御方法、情報処理装置、及びコンピュータプログラム |
| JP4136771B2 (ja) | 2003-04-23 | 2008-08-20 | キヤノン株式会社 | 通信システム、通信装置、及びその制御方法、並びにコンピュータプログラム |
| JP2006109296A (ja) * | 2004-10-08 | 2006-04-20 | Canon Inc | デジタルカメラ及びデジタルカメラの制御方法 |
| JP4356997B2 (ja) * | 2005-03-15 | 2009-11-04 | キヤノン株式会社 | 通信装置及びその通信方法 |
| JP4366323B2 (ja) * | 2005-03-15 | 2009-11-18 | キヤノン株式会社 | 通信装置およびその制御方法 |
| JP4502389B2 (ja) * | 2005-03-15 | 2010-07-14 | キヤノン株式会社 | 通信装置及びその制御方法 |
| JP4656637B2 (ja) * | 2005-04-27 | 2011-03-23 | キヤノン株式会社 | 通信装置及び通信システムとその通信パラメータ設定方法 |
| JP4900891B2 (ja) * | 2005-04-27 | 2012-03-21 | キヤノン株式会社 | 通信装置及び通信方法 |
| JP3925660B2 (ja) * | 2005-06-09 | 2007-06-06 | オムロン株式会社 | 通信マスタ局の起動時制御方法 |
| JP4266962B2 (ja) * | 2005-06-16 | 2009-05-27 | キヤノン株式会社 | 通信装置、その制御方法及びプログラム |
| US8619623B2 (en) * | 2006-08-08 | 2013-12-31 | Marvell World Trade Ltd. | Ad-hoc simple configuration |
| US8732315B2 (en) * | 2006-10-16 | 2014-05-20 | Marvell International Ltd. | Automatic ad-hoc network creation and coalescing using WiFi protected setup |
| US8233456B1 (en) | 2006-10-16 | 2012-07-31 | Marvell International Ltd. | Power save mechanisms for dynamic ad-hoc networks |
| JP4886463B2 (ja) | 2006-10-20 | 2012-02-29 | キヤノン株式会社 | 通信パラメータ設定方法、通信装置及び通信パラメータを管理する管理装置 |
| US9308455B1 (en) | 2006-10-25 | 2016-04-12 | Marvell International Ltd. | System and method for gaming in an ad-hoc network |
| JP4871696B2 (ja) | 2006-10-27 | 2012-02-08 | キヤノン株式会社 | 通信パラメータの設定処理方法、通信装置、通信装置の制御方法、プログラム |
| US9060325B2 (en) * | 2006-12-04 | 2015-06-16 | Intel Corporation | Method and apparatus for creating and connecting to an ad hoc wireless cell |
| US8391786B2 (en) * | 2007-01-25 | 2013-03-05 | Stephen Hodges | Motion triggered data transfer |
| JP4789817B2 (ja) * | 2007-01-29 | 2011-10-12 | キヤノン株式会社 | 通信装置及び通信装置の通信方法、プログラム |
| JP4956281B2 (ja) * | 2007-05-29 | 2012-06-20 | キヤノン株式会社 | 無線通信装置およびその制御方法 |
| JP5053715B2 (ja) | 2007-05-31 | 2012-10-17 | キヤノン株式会社 | 通信装置、通信装置の制御方法、当該制御方法をコンピュータに実行させるためのコンピュータプログラム |
| US8628420B2 (en) | 2007-07-03 | 2014-01-14 | Marvell World Trade Ltd. | Location aware ad-hoc gaming |
| JP5171167B2 (ja) * | 2007-09-05 | 2013-03-27 | キヤノン株式会社 | 通信パラメータの設定処理を行う通信装置、当該通信装置の制御方法、並びにコンピュータプログラム |
| JP5328142B2 (ja) * | 2007-12-05 | 2013-10-30 | キヤノン株式会社 | 通信装置、通信装置の制御方法、コンピュータプログラム |
| JP5328141B2 (ja) * | 2007-12-05 | 2013-10-30 | キヤノン株式会社 | 通信装置、通信装置の制御方法、コンピュータプログラム |
| US8411587B2 (en) * | 2008-02-11 | 2013-04-02 | Dell Products L.P. | System and method for configuring a network |
| JP5270937B2 (ja) | 2008-03-17 | 2013-08-21 | キヤノン株式会社 | 通信装置及びその制御方法 |
| JP5183307B2 (ja) * | 2008-06-10 | 2013-04-17 | キヤノン株式会社 | 通信装置、通信装置の通信方法、プログラム、記憶媒体 |
| JP5149715B2 (ja) * | 2008-06-30 | 2013-02-20 | キヤノン株式会社 | 通信システム、通信装置及びその制御方法、プログラム |
| JP5564774B2 (ja) * | 2008-09-24 | 2014-08-06 | ソニー株式会社 | 情報処理装置および方法、並びに、プログラム |
| US8489569B2 (en) | 2008-12-08 | 2013-07-16 | Microsoft Corporation | Digital media retrieval and display |
| JP5705415B2 (ja) | 2009-04-06 | 2015-04-22 | ソニー株式会社 | 無線通信装置、通信システム、通信方法及びプログラム |
| JP5235777B2 (ja) * | 2009-05-15 | 2013-07-10 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP5235778B2 (ja) | 2009-05-15 | 2013-07-10 | キヤノン株式会社 | 通信装置、通信装置の制御方法 |
| JP5409147B2 (ja) | 2009-07-03 | 2014-02-05 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| US8402272B2 (en) * | 2009-07-22 | 2013-03-19 | Panasonic Corporation | Master unit and slave unit |
| US8700780B2 (en) * | 2009-10-15 | 2014-04-15 | Qualcomm Incorporated | Group owner selection with crossing requests |
| JP5414452B2 (ja) | 2009-10-21 | 2014-02-12 | キヤノン株式会社 | 通信装置、通信方法、プログラム |
| JP2013530601A (ja) * | 2010-05-05 | 2013-07-25 | エスエムエスシイ・ホールディングス・エス エイ アール エル | Wi−Fi設定及び構成のための方法及びシステム |
| JP5312515B2 (ja) * | 2011-05-12 | 2013-10-09 | キヤノン株式会社 | 通信装置及び通信方法 |
| KR101797039B1 (ko) * | 2011-08-31 | 2017-11-13 | 삼성전자주식회사 | 적어도 두 개의 디바이스간 무선 연결방법 및 이를 이용한 무선연결 가능한 디바이스 |
| JP6019950B2 (ja) * | 2011-09-13 | 2016-11-02 | ソニー株式会社 | 電力供給装置および方法、並びにプログラム |
| US9516615B2 (en) | 2011-11-18 | 2016-12-06 | Apple Inc. | Selection of synchronization stations in a peer-to-peer network environment |
| US9473574B2 (en) | 2011-11-18 | 2016-10-18 | Apple Inc. | Synchronization of devices in a peer-to-peer network environment |
| US10271293B2 (en) | 2011-11-18 | 2019-04-23 | Apple Inc. | Group formation within a synchronized hierarchy of peer-to-peer devices |
| JP5967947B2 (ja) * | 2012-01-25 | 2016-08-10 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP6408753B2 (ja) | 2012-05-17 | 2018-10-17 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP6128844B2 (ja) * | 2012-12-28 | 2017-05-17 | キヤノン株式会社 | 通信装置およびその制御方法、プログラム並びに記憶媒体 |
| JP5539549B2 (ja) * | 2013-01-16 | 2014-07-02 | キヤノン株式会社 | 通信装置、通信装置の通信方法、プログラム、記憶媒体 |
| JP5442140B2 (ja) * | 2013-01-16 | 2014-03-12 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP5458195B2 (ja) * | 2013-02-18 | 2014-04-02 | キヤノン株式会社 | 通信装置及びその制御方法 |
| JP5587452B2 (ja) * | 2013-03-26 | 2014-09-10 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP2014241513A (ja) | 2013-06-11 | 2014-12-25 | キヤノン株式会社 | 通信装置、通信装置の制御方法、及びプログラム |
| JP2015095686A (ja) * | 2013-11-08 | 2015-05-18 | キヤノン株式会社 | 撮像装置、撮像システム、撮像装置の制御方法、撮像システムの制御方法、及びプログラム |
| JP6317576B2 (ja) | 2013-11-29 | 2018-04-25 | キヤノン株式会社 | 通信装置、通信装置の制御方法およびプログラム |
| JP5597299B2 (ja) * | 2013-12-19 | 2014-10-01 | キヤノン株式会社 | 通信装置、通信装置の制御方法、プログラム |
| JP2016136364A (ja) | 2015-01-23 | 2016-07-28 | キヤノン株式会社 | 通信装置及びその制御方法、プログラム |
| JP2016001919A (ja) * | 2015-08-26 | 2016-01-07 | ソニー株式会社 | 無線通信装置 |
| US10880704B2 (en) * | 2017-04-26 | 2020-12-29 | Nhn Entertainment Corporation | Method of exposing a received message, user terminal performing the same and computer readable medium for performing the same |
Family Cites Families (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5365523A (en) * | 1992-11-16 | 1994-11-15 | International Business Machines Corporation | Forming and maintaining access groups at the lan/wan interface |
| JPH09101767A (ja) * | 1995-07-31 | 1997-04-15 | Canon Inc | 端末装置、端末の制御方法、会議システム、およびコンピュータ可読メモリ |
| US6026303A (en) * | 1996-11-07 | 2000-02-15 | Nec Corporation | Method for determining optimal parent terminal and ad hoc network system for the same |
| JP2924828B2 (ja) | 1996-11-07 | 1999-07-26 | 日本電気株式会社 | アドホックネットワークシステムとその接続方法 |
| JPH10240552A (ja) * | 1996-12-26 | 1998-09-11 | Canon Inc | 情報処理装置及びその方法 |
| JPH10240551A (ja) * | 1996-12-26 | 1998-09-11 | Canon Inc | 情報処理システム及びその方法 |
| JPH11146030A (ja) | 1997-11-07 | 1999-05-28 | Nec Corp | 無線会議システムの仮親決定方式 |
| JP4040256B2 (ja) * | 1999-03-17 | 2008-01-30 | 富士通株式会社 | サーバシステム及び記録媒体 |
| US6434113B1 (en) * | 1999-04-09 | 2002-08-13 | Sharewave, Inc. | Dynamic network master handover scheme for wireless computer networks |
| JP2001014119A (ja) | 1999-07-02 | 2001-01-19 | Hitachi Ltd | 画像信号処理装置 |
| DE69942507D1 (de) | 1999-12-06 | 2010-07-29 | Ericsson Telefon Ab L M | Intelligente Herstellung von Piconets |
| US20010029530A1 (en) * | 2000-03-03 | 2001-10-11 | Yoshiko Naito | System and method of managing resource in network system |
| JP2001345827A (ja) * | 2000-06-02 | 2001-12-14 | Minolta Co Ltd | インターフェース装置、これを有するノード、インターフェースシステム、バスリセットの制御方法およびバスリセットの制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| US6876643B1 (en) * | 2000-08-08 | 2005-04-05 | International Business Machines Corporation | Clustering in wireless ad hoc networks |
| JP4187935B2 (ja) * | 2000-08-23 | 2008-11-26 | 株式会社東芝 | 無線通信システム、送信装置、受信装置及びコンテンツデータ転送方法 |
| US6865371B2 (en) * | 2000-12-29 | 2005-03-08 | International Business Machines Corporation | Method and apparatus for connecting devices via an ad hoc wireless communication network |
| JP4029629B2 (ja) * | 2001-03-27 | 2008-01-09 | セイコーエプソン株式会社 | 通信機器、通信方法およびプログラム |
| US7506047B2 (en) * | 2001-03-30 | 2009-03-17 | Bmc Software, Inc. | Synthetic transaction monitor with replay capability |
| EP1442388A2 (en) * | 2001-10-03 | 2004-08-04 | Shield One, LLC | Remotely controlled failsafe boot mechanism and remote manager for a network device |
| JP3937820B2 (ja) * | 2001-11-27 | 2007-06-27 | セイコーエプソン株式会社 | 無線ネットワークのアダプタ |
| AU2003202801A1 (en) | 2002-01-15 | 2003-09-02 | Matsushita Electric Industrial Co., Ltd. | Routing device and startup method thereof in a home network |
| JP2003218875A (ja) | 2002-01-18 | 2003-07-31 | Seiko Epson Corp | 無線通信装置へのパラメータの設定 |
| US7065526B2 (en) * | 2002-02-21 | 2006-06-20 | Intuit, Inc. | Scalable database management system |
| US20030191814A1 (en) * | 2002-04-03 | 2003-10-09 | Luu Tran | Personalization in a wireless portal server |
| KR20050016497A (ko) * | 2002-06-04 | 2005-02-21 | 캐논 가부시끼가이샤 | 인쇄 장치 및 그 제어 방법 및 인쇄 시스템 |
| US7024204B2 (en) * | 2002-07-10 | 2006-04-04 | Kabushiki Kaisha Toshiba | Wireless communication scheme with communication quality guarantee and copyright protection |
| JP3860513B2 (ja) | 2002-07-12 | 2006-12-20 | 株式会社東芝 | 送信装置、受信装置及び無線基地局 |
| US20040019681A1 (en) * | 2002-07-22 | 2004-01-29 | Tadashi Nakamura | Data management apparatus and data management system |
| US6985740B2 (en) * | 2002-08-08 | 2006-01-10 | Green Wireless Llc | System for and method of providing priority access service and cell load redistribution |
| US7016673B2 (en) * | 2002-10-01 | 2006-03-21 | Interdigital Technology Corporation | Wireless communication method and system with controlled WTRU peer-to-peer communications |
| JP3848235B2 (ja) * | 2002-10-04 | 2006-11-22 | ソニー株式会社 | 通信処理装置、通信処理システム、および方法、並びにコンピュータ・プログラム |
| JP4073808B2 (ja) * | 2003-03-17 | 2008-04-09 | シャープ株式会社 | ネットワーク再構築方法、ノード、ネットワーク再構築プログラム、および該プログラムを記録したコンピュータ読取り可能な記憶媒体 |
| JP2004320162A (ja) * | 2003-04-11 | 2004-11-11 | Sony Corp | 無線通信システムおよび方法、無線通信装置および方法、プログラム |
| JP4235481B2 (ja) * | 2003-04-15 | 2009-03-11 | キヤノン株式会社 | 通信機器及び通信機器のデータ処理方法 |
| US7305458B2 (en) * | 2003-04-22 | 2007-12-04 | Accton Technology Corporation | System and method for auto-configuring stackable network devices |
| JP4125172B2 (ja) * | 2003-04-23 | 2008-07-30 | キヤノン株式会社 | 無線通信システム、無線通信装置、及びその制御方法、並びにコンピュータプログラム |
| JP4136771B2 (ja) * | 2003-04-23 | 2008-08-20 | キヤノン株式会社 | 通信システム、通信装置、及びその制御方法、並びにコンピュータプログラム |
| JP4481079B2 (ja) * | 2003-06-12 | 2010-06-16 | パナソニック株式会社 | Bluetoothマスタ選択方法、Bluetoothマスタ選択プログラムおよびBluetooth装置 |
| KR100552490B1 (ko) | 2003-06-13 | 2006-02-15 | 삼성전자주식회사 | 무선 애드혹 네트워크 환경에서 중재자 교체방법 및 그방법을 사용하는 통신시스템 |
| CN100449989C (zh) * | 2003-07-16 | 2009-01-07 | 华为技术有限公司 | 一种触发802.1x认证过程的方法 |
| DE602004014935D1 (de) * | 2003-08-06 | 2008-08-21 | Matsushita Electric Ind Co Ltd | Endgeräteeinrichtung und verfahren zum master-slave-weiterreichen in einem media-zugangs-kommunikationssystem |
| JP2005065102A (ja) | 2003-08-19 | 2005-03-10 | Keio Gijuku | 無線通信装置およびアドホックシステム |
| WO2005018161A1 (ja) * | 2003-08-19 | 2005-02-24 | Keio University | 無線通信装置、アドホックシステムおよび通信システム |
| JP4136857B2 (ja) * | 2003-09-11 | 2008-08-20 | キヤノン株式会社 | 機器検索方法およびプログラム |
| US7463886B2 (en) * | 2003-09-16 | 2008-12-09 | Spyder Navigations L.L.C. | Method and system for supporting residual energy awareness in an ad hoc wireless communications network |
| US7631181B2 (en) * | 2003-09-22 | 2009-12-08 | Canon Kabushiki Kaisha | Communication apparatus and method, and program for applying security policy |
| JPWO2005034434A1 (ja) | 2003-10-03 | 2007-11-22 | シャープ株式会社 | 通信装置、その装置の動作モード起動方法、通信方法、通信システム、プログラム、および、そのプログラムを記録した記録媒体 |
| GB0323780D0 (en) * | 2003-10-10 | 2003-11-12 | Ibm | A data brokering method and system |
| US20050256934A1 (en) * | 2003-11-07 | 2005-11-17 | Tetsuro Motoyama | Method and system for controlling and communicating with machines using multiple communication formats |
| EP1699185A1 (en) * | 2004-01-30 | 2006-09-06 | Matsushita Electric Industries Co., Ltd. | Communication system, information processing system, information processing apparatus, tunnel management apparatus, information processing method, tunnel management method, and program |
| CN100340084C (zh) * | 2004-04-28 | 2007-09-26 | 联想(北京)有限公司 | 一种实现设备分组及分组设备间交互的方法 |
| US7461130B1 (en) * | 2004-11-24 | 2008-12-02 | Sun Microsystems, Inc. | Method and apparatus for self-organizing node groups on a network |
| JP4366323B2 (ja) * | 2005-03-15 | 2009-11-18 | キヤノン株式会社 | 通信装置およびその制御方法 |
| JP4656637B2 (ja) * | 2005-04-27 | 2011-03-23 | キヤノン株式会社 | 通信装置及び通信システムとその通信パラメータ設定方法 |
| JP4900891B2 (ja) * | 2005-04-27 | 2012-03-21 | キヤノン株式会社 | 通信装置及び通信方法 |
| JP4266962B2 (ja) * | 2005-06-16 | 2009-05-27 | キヤノン株式会社 | 通信装置、その制御方法及びプログラム |
-
2005
- 2005-04-27 JP JP2005130478A patent/JP4250611B2/ja active Active
-
2006
- 2006-04-24 US US11/409,314 patent/US7882196B2/en active Active
- 2006-04-27 EP EP06252253.7A patent/EP1718028B1/en active Active
- 2006-04-27 EP EP16151360.1A patent/EP3038324A1/en not_active Withdrawn
- 2006-04-27 CN CN201310556352.0A patent/CN103686872B/zh active Active
- 2006-04-27 CN CN201310556400.6A patent/CN103686873B/zh active Active
- 2006-04-27 CN CN2008101080667A patent/CN101335673B/zh active Active
- 2006-04-27 CN CN201310556158.2A patent/CN103686871B/zh active Active
- 2006-04-27 CN CN2006100745363A patent/CN1855865B/zh active Active
- 2006-04-27 KR KR20060038004A patent/KR100719473B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| CN101335673B (zh) | 2011-09-28 |
| CN103686873A (zh) | 2014-03-26 |
| EP3038324A1 (en) | 2016-06-29 |
| CN101335673A (zh) | 2008-12-31 |
| KR100719473B1 (ko) | 2007-05-18 |
| US7882196B2 (en) | 2011-02-01 |
| CN1855865A (zh) | 2006-11-01 |
| CN103686871A (zh) | 2014-03-26 |
| CN1855865B (zh) | 2013-11-27 |
| EP1718028A1 (en) | 2006-11-02 |
| CN103686872A (zh) | 2014-03-26 |
| KR20060113482A (ko) | 2006-11-02 |
| CN103686871B (zh) | 2017-07-14 |
| JP2006311138A (ja) | 2006-11-09 |
| CN103686872B (zh) | 2017-12-15 |
| US20060246947A1 (en) | 2006-11-02 |
| CN103686873B (zh) | 2017-07-14 |
| EP1718028B1 (en) | 2016-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4250611B2 (ja) | 通信装置、通信パラメータ設定方法及び通信方法 | |
| JP4900891B2 (ja) | 通信装置及び通信方法 | |
| EP1526444B1 (en) | Wireless lan system, communication terminal, and communications program | |
| KR100690406B1 (ko) | 정보처리장치 및 그 접속 제어 방법 | |
| JP4475639B2 (ja) | 無線端末装置及びその制御方法と通信制御方法 | |
| JP4642807B2 (ja) | ネットワーク形成方法及び通信装置 | |
| KR20060113481A (ko) | 통신장치 및 통신시스템과 그 통신장치의 통신 파라미터설정 방법 | |
| CN113940099B (zh) | 通信装置、通信装置的控制方法和存储介质 | |
| JP2022180593A (ja) | 通信装置、制御方法、及びプログラム | |
| JP7133898B2 (ja) | 通信装置、通信装置の制御方法、およびプログラム | |
| JP2006285090A (ja) | ネットワーク構築方法及び通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070507 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070507 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20070507 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080516 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090105 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090119 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120123 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4250611 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130123 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140123 Year of fee payment: 5 |