JP4190041B2 - 自動変速機の制御装置 - Google Patents
自動変速機の制御装置 Download PDFInfo
- Publication number
- JP4190041B2 JP4190041B2 JP25591597A JP25591597A JP4190041B2 JP 4190041 B2 JP4190041 B2 JP 4190041B2 JP 25591597 A JP25591597 A JP 25591597A JP 25591597 A JP25591597 A JP 25591597A JP 4190041 B2 JP4190041 B2 JP 4190041B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- automatic transmission
- control
- vehicle
- control amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Traffic Control Systems (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Control Of Fluid Gearings (AREA)
- Control Of Transmission Device (AREA)
Description
【発明の属する該術分野】
この発明は、自動変速機を制御する制御装置に関するものである。
【0002】
【従来の技術】
車両前方に障害物がある場合には、一般に運転者は、フットブレーキを作動させて自動車を減速または停止させるか、或いはステアリングを操作して自動車を操縦して、該障害物に追突しないようにしている。
しかし、運転者がそのような障害物に気付かなかったり、その障害物がすぐ前方を走行する自動車である場合には、その自動車との相対速度や車間距離の目測を誤ったりすることがあり、その結果、自動車が該先行車に追突する可能性が高まる。このような課題を解決するため、本出願人は、特開平4−95653号を提案した。この技術では、レーダ装置により先行車までの距離を測定することで、接近速度を求め、車間距離が短く且つ接近速度が早いときには自動変速機(以下A/T)の変速段を落とす(シフトダウン)ことで、車両に自動的に制動力が加わるようにしている。
【0003】
【発明が解決しようとする課題】
上記技術では、前方車両との車間距離や接近速度に基づいてA/Tを制御しているが、シフトダウンを前方車両との車間距離や接近速度に基づいてのみ開始している。特開平4−95653においては、所定の変速比を有する複数の変速段を段階的に設定した自動変速機を制御するようにしている。このため、以下の課題が発生する。
車間距離や接近速度については、運転者による個人差が大きく画一的に自動変速機の制御を行うと、運転者に違和感を与えることになる。例えば、車間距離の取り方は運転者により異なり、同じ条件(相対距離、相対速度)で自動変速機のシフトダウンを行うと、車間距離を詰め気味に運転する者にとっては、減速開始が早く感じ、反対に、車間距離を広めに取る者に対しては、減速開始が遅く感じさせることになる。
【0004】
また、同じ運転者が運転していても、走行環境によって車間距離及び接近距離が微妙に変化する。例えば、同じ速度(例えば40Km/h )で走行していても、渋滞中の高速道路の場合と、一般路走行中では、運転者の取り得る車間距離が異なってくる。また、高速道路であっも、車線数が少なく、車線幅が狭い都市高速と、車線数が多く車線幅の広い一般高速道路とでは、車間距離の取り方が異なり、接近速度の変化の仕方も相違する。更に、市街地複数車線路と郊外片側1車線路とでも、状況が異なる。このように、走行環境により車間距離、接近速度が異なるのに、一律に相対距離、相対速度に基づいて自動変速機のシフトダウン制御を行うと、運転者に違和感を与えることになる。
【0005】
更に、特開平4−95653号の技術では、先行車との車間距離が詰まった際に、自動変速機の変速段を4速から3速、3速から2速と自動的にシフトダウンするため、制動力の大きさが、変速段に応じて決定されることもあり、運転者の要求に応じた細かく設定された制動力を与えることはできなかった。。
【0006】
本発明は、上述した課題を解決するためになされたものであり、その目的とするところは、運転者に違和感を与えることなく追突事故を未然に防ぎ、また運転者の要求に応じたエンジンブレーキによる制動力を与えることができる自動変速機の制御装置を提案することにある。
【0007】
【課題を解決するための手段】
請求項1の自動変速機の制御装置は、上記目的を達成するため、トルクコンバータ内のロックアップクラッチをスリップ制御し得る自動変速機の制御装置であって、
運転者による減速動作の開始を検出する減速操作検出手段と、
前方車両との距離及び相対速度を検出する速度検出手段と、
前記速度検出手段により検出された前方車両との距離、相対速度、及び、自車速度に応じ、相対速度毎に用意され一方の軸上に相対距離、他方の軸上に自車速度を取ったマップであって、相対距離及び自車速度に応じた変速段と共に、各変速段でのスリップ量、各変速段でのロックアップの要否を決定するマップを用いて自動変速機の変速段及びトルクコンバータのロックアップクラッチの係合状態の制御量を決定する制御量決定手段と、
前記減速操作検出手段により、運転者による減速動作の開始が検出された際に、前記制御量決定手段により決定された制御量に従い自動変速機を制御する制御手段と、を備えることを技術的特徴とする。
【0011】
【課題を解決するための手段】
請求項1の自動変速機の制御装置は、上記目的を達成するため、トルクコンバータ内のロックアップクラッチをスリップ制御し得る自動変速機の制御装置であって、
運転者による減速動作の開始を検出する減速操作検出手段と、
前方車両との距離及び相対速度を検出する速度検出手段と、
前記速度検出手段により検出された前方車両との距離、相対速度、及び、自車速度に応じて自動変速機の変速段及びトルクコンバータのロックアップクラッチの係合状態の制御量を決定する制御量決定手段と、
前記減速操作検出手段により、運転者による減速動作の開始が検出された際に、前記制御量決定手段により決定された制御量に従い自動変速機を制御する制御手段と、を備えることを技術的特徴とする。
【0014】
請求項1の発明では、前方車両との距離、相対速度及び自車速度が測定され、即ち、前方車両との接近が検出された際に、シフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調整することができる。また、運転者による減速動作の開始(アクセルペダルのオフ、ブレーキペダルのオン)を検出したタイミングで自動変速機のシフトダウンを行うため、運転者に違和感を与えることなく減速して、前方車への追突を回避することができる。
【0015】
請求項2〜5の発明では、
前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じて、シフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
また、運転者による減速動作の開始(アクセルペダルのオフ、ブレーキペダルのオン)を検出したタイミングで自動変速機のシフトダウンを行うため、運転者に違和感を与えることなく減速して、カーブを円滑に走行し得るように変速段を自動的に切り替えることができる。
【0016】
請求項6の発明では、前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じてシフトダウンを行う制御と、道路の勾配と現在車速に応じてシフトダウンを行う制御のいずれか1つを選択して、道路の状況及び走行状況に対応してシフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
【0017】
請求項7の発明では、前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じてシフトダウンを行う制御と、道路の勾配と現在車速に応じてシフトダウンを行う制御と、前方車両との距離、相対速度及び自車速度が測定され、即ち、前方車両との接近が検出された際に、シフトダウンを行う制御のいずれか1つを選択して、道路の状況及び走行状況に対応してシフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
【0018】
【発明の実施の形態】
以下、本発明の第1実施形態に係る自動変速機の制御装置について図を参照して説明する。
図1は第1実施態様の自動変速機の制御装置の構成を示すブロック図である。
制御装置10には、車速を検出する車速センサ32と、ステアリングの操作(舵角)を検出する舵角センサ34と、ウインカーの操作によりオン−オフするウインカースイッチ36と、アクセルペダルの踏み込み量を検出するアクセルセンサ38と、ブレーキペダルの操作を検出するブレーキスイッチ39とが接続されている。
【0019】
該制御装置10は、自動変速機制御ユニット12に制御信号を与えるように構成されている。また、該制御装置10には、先行車までの距離を検出するための距離検出装置20が接続されている。該距離検出装置20は、レーザ光を送出する発信装置26と、先行車にて反射されたレーザ光を受信する受信装置22とから構成されている。
【0020】
上述した距離検出装置20は、レーザ光を障害物に反射させる構成を採用しているが、障害物までの距離を検出する装置としては、電波、超音波等を用いて障害物からの反射波の到達時間、ドプラー効果による周波数の偏位を測定するのもの他、CCDカメラを2台用いることもできる。
【0021】
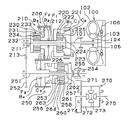
図2は、自動変速機の制御ユニット12により制御させる自動変速機の構成を示している。自動変速機は、流体式トルクコンバータ100と、該トルクコンバータ100の出力軸101に同軸的に連結され、前進3段、後進1段の変速を行うための第1のアンダードライブ変速機210、該第1のアンダードライブ変速機210に並列して連結され前進2段の変速を行うための第2のアンダードライブ変速機250の出力軸に連結されたディファレンシャルギア270とからなるギアトレーン200とで構成されている。
【0022】
トルクコンバータ100は、エンジンの出力軸に連結されたポンプインペラ102、出力軸101に連結されたタービンランナ103、一方向クラッチ104を介して自動変速機ケースに固定されたステータ105からなっており、ロックアップクラッチ106を備えている。
【0023】
トルクコンバータ100の出力軸101を入力軸とし、該入力軸と該入力軸の左方(図示左方、以下同じ)に同軸的に配された出力軸211との間に、第1のアンダードライブ変速機210は、第1のプラネタリギヤセット220、第2のプラネタリギヤセット230及びこれらプラネタリギヤセットの構成要素を係合、解放または固定する多板クラッチCl、C2、バンドブレーキBl、多板ブレーキB2、B3、一方向クラッチなど摩擦係合装置を配置してなる。
【0024】
第1のプラネタリギヤセット220は、トルクコンバータ100の出力軸101に連結されたリングギヤ222、第1のアンダードライブ変速機210の出力軸211に外嵌されるとともに回転自在に支持されたリングギヤ軸212の右端(図示右端、以下同じ)に形成されたサンギヤ223、出力軸の右端に連結されたキャリア224、リングギヤ222とサンギヤ223との間に噛み合いされるとともにキャリア224に回転自在に保持されたプラネタリギヤ225からなる。サンギヤ軸212には第1のプラネタリギヤセット220を収納する状態でドラム226がその左端(図示左端)側壁において取り付けられ、該ドラム226は開口した右端が多板クラッチC2を介してシリンダ221に連結されるとともに外周がバンドブレーキBlを介して自動変速機ケースに固定されるようになっている。また、サンギヤ軸212は、中間ブレーキが一方向クラッチFlおよび該一方向クラッチFlと直列に配役された多板ブレーキB2を介して自動変速機ケースに固定されている。
【0025】
第2のプラネタリギヤセット230は、第1のアンダードライブ変速機の出力軸211の左側部に連結されたリングギヤ231、サンギヤ軸212の左端に形成されたサンギヤ232、一方向クラッチF2および該一方向クラッチF2と並列に配設された多板ブレーキB3を介して自動変速機ケースに固定されるキャリア233、リングギヤ231およびサンギヤ232の間に噛み合いされるとともにキャリア233に回転自在に支持されたプラネタリギヤ234からなる。
第1のアンダードライブ変速機の出力軸211の左端には第1のアンダードライブ変速機210の出力ギア213が固着されており、該出力軸213は第2のアンダードライブ変速機250の入力軸251の左端に固着された入力ギア252と噛合している。
【0026】
第2のアンダードライブ変速機250は、第1のアンダードライブ変速機の入出力軸と並列に配設された入力軸251と該入力軸251の左端に外嵌され回転自在に支持され外周に出力ギア255に形成された中空出力軸254との間に第3のプラネタリギヤセット260と、その構成要素を係合、開放または固定する多板クラッチC3、多板ブレーキB4、および一方向クラッチF3など摩擦係合装置を配してなる。
【0027】
第3のプラネタリギヤセット260は、第2のアンダードライブ変速機の入力軸251の右側部に連結されたリングギヤ261、入力軸25lに回転自在に外嵌されるとともに左側部がブレーキB4および該ブレーキB4と並列に配設された一方向クラッチF3を介して自動変速機ケースに固定されるサンギヤ軸253の右端部に形成されたサンギヤ262、第3のプラネタリギヤセット260を収納するとともに、右端は出力軸254に連結され左端は多板クラッチC3を介してサンギヤ軸253の左側部に連結され、外周にガバナドライブギア256およびパーキングギア257が形成されているドラム258に連結されたキャリア263、およびリングギヤ261とサンギヤ262との間に噛合されるとともにキャリア263に回転自在に支持されたプラネタリギヤ264とからなる。
ディファレンシヤルギア270は、第2のアンダードライブ変速機の出力ギア255と噛合する駆動大歯車271、ディファレンシャルギアボックス272、差動ギア273、駆動車輪に連結される出力軸274および275からなる。
【0028】
ここで、図示しない油圧制御機構により図2に示す構成の自動変速機は制御される。ここで、シフトレバー(図示せず)がドライブレンジに入れられると、該油圧制御機構によりクラッチC1が係合され、ブレーキB1、B2、B3が開放され、ブレーキB4が作動して1速にシフトされる。そして、車速センサ32にて検出された車速が予め設定した大きさになったとき、ブレーキB2が係合するとともに、クラッチC1及びブレーキB4が係合状態を保持し2速へアップシフトする。
【0029】
車速センサ34及びアクセルセンサ38にて検出された車速、スロットル開度等が上昇して所定値に達したとき、クラッチC2が係合し、クラッチC1及びブレーキB3、B4が係合状態に保持される。これにより3速にアップシフトする。車速、及び、スロットル開度が更に上昇して所定値に達したとき、クラッチC3が係合するとともに、ブレーキB4が開放し、また、ブレーキB2が係合状態に保持される。これにより4速へアップシフトする。
【0030】
上記ロックアップクラッチ106は、エンジン水温や車速及びスロットル開度等に依存した所定条件が整ったときに油圧回路により駆動され、ポンプインペラ102とタービンランナ103とを(所定のスリップ量で)係合(締結)する。このロックアップクラッチ106は、トルクコンバータ100の入力側と出力側とを直結すると共に、入力側のポンプ回転速度(エンジン回転速度に対応)と出力側のタービン回転速度との回転差に応じて、該ロックアップクラッチ106の係合力を所定の状態にフィードバック制御(スリップ制御)を行う。
【0031】
ここで、該ロックアップクラッチ106がスリップ制御される条件として、タービン回転速度或いはエンジン回転速度が所定範囲に入っていること、例えば、1000rpm 〜4000rpm の範囲に入っていること、エンジン冷却水が所定の範囲、例えば、70°C〜120°Cの範囲に入っていること、変速が終了していること等を必要とする。
【0032】
ここで、第1実施態様の制御装置10は、先行車との相対速度、相対距離(車間距離)、自車速度を算出し、先行車へ追突する可能性があるとき、即ち、相対速度に対して相対距離が短いときに、運転者による減速動作の開始(イベント)を検出すると、自動変速機のシフトダウンを行わしめる。このシフトダウン制御は、制御装置10に保持された図3に示す内容のマップに基づき行われる。
【0033】
ここで、該マップは、相対速度毎に用意されており、縦軸上に相対距離(車間距離)が、横軸上に自車速度が取られている。該マップは、相対速度、相対距離、自車速度に応じて、追突を未然に防ぐよう減速するのに最適な変速段、流体式トルクコンバータの状態(スリップ量)は何かという観点で作られている。マップ中の4速、3速、2速はそれぞれの変速段を示し、4速、3速中のS(最大スリップ)は、ロックアップクラッチ106により最大限にスリップさせる場合を示し(ここでは、流体式トルクコンバータ100により20%エンジントルクがスリップするものとする)。また、LP(ロックアップ)は、ロックアップクラッチ106によりエンジン側と変速機220とが流体式トルクコンバータ100を介さず直結(スリップ0%)された状態を示している。ここで、S(最大スリップ)からLP(ロックアップ)の間は、20%〜0%の間で、ロックアップクラッチ106により制御されるスリップ量を調整することで、最適なエンジンブレーキによる制動力を得るようにする。
【0034】
上述したマップに従う制御動作について、図4の説明図を参照して説明する。図4(A)、図4(B)、図4(C)は、自車VMと先行車VFとの相対速度を同一条件とし、相対距離、自車速度が異なる場合をそれぞれ示している。
ここで、図4(A)は、相対距離がL1で短い場合(自車速度V1)を示している。ここでは、大きな制動力が必要となる。このため、図3中のマップに示すように2速へのシフトダウンが必要となる。
【0035】
図4(B)は、相対距離がL2で比較的余裕がある場合(自車速度V2)を示している。ここでは、有る程度制動力を必要とするが、2速では、制動力が強すぎるが、3速でスリップのある状態では弱い。このため、3速で、ロックアップ状態が必要となる。即ち、流体式トルクコンバータをスリップ状態ではなく、完全にエンジン出力と変速機を直結することで、スリップ状態と比較して大きな制動力を得る。
【0036】
図4(C)は、相対距離がL3で更に余裕がある場合(自車速度V2)を示している。ここでは、3速ロックアップ状態では、制動力が強すぎる。このため、3速でスリップ状態が必要とされるが、スリップ量として15%が制御目標とされる。ここでは、自動変速機の変速段と流体式トルクコンバータのスリップ量とを組み合わせることにより、より細かな制動力を得ている。
【0037】
引き続き、図5のフローチャートを参照して図1に示す制御装置10及び自動変速機制御ユニット12による処理について説明する。
先ず、制御装置10は、車両側のデータを入力する(S10)。ここでは、車速センサ32からの車速、舵角センサ34からのステアリング舵角、ウインカースイッチ36からのウインカー操作、アクセルセンサ38からのアクセルペダルの踏み込み量、ブレーキセンサ39からのブレーキペダル操作のデータ、距離検出装置20から先行車との相対距離(車間距離)を入力する。その後、前回測定した先行車との相対距離と今回検出した相対距離の差と、この測定時間間隔に基づいて、相対速度Vrを算出する(S12)。
【0038】
そして、相対速度、相対距離、自車速度より最適A/T変速段、流体式トルクコンバータ100の状態(スリップ量)を図3を参照して上述したマップから判定する(S14)。即ち、算出された相対速度ごとに設定されたマップに基づき、相対距離、自車速度に応じて変速段、スリップ量を決定する。
【0039】
次に、入力された自車速度とスロットル開度とに基づき、予め設定されている通常制御用変速段マップ(図示せず)から自動変速機の通常の変速段を決定する(S16)。即ち、図3を参照して上述した減速制御を行わない通常時の自動変速機の制御に基づく変速段を決定する。引き続き、入力されたアクセル開度及びブレーキの踏み込み量の信号から、アクセルペダルのオンからオフの動作、ブレーキペダルのオフからオンの動作(以下イベントとして参照する)、即ち、運転者による積極的な減速動作の開始を検出する。
【0040】
ここで、イベントがあるまでは(S20がNo)、ステップ22へ進み、上述したステップ16にて判定した基本的な変速段に基づき自動変速機を制御する。
【0041】
他方、イベントがあった際に(S20がYes)、即ち、アクセルペダルオフ、又は、ブレーキペダルオンされたタイミングで、上記ステップ14にて判定した変速段及び流体式トルクコンバータの状態に自動変速機を制御する(S24)。ここでは、上述したステップ16で決定された変速段よりも、ステップ14にて判定した変速段が低い際に、該低い変速段に従い変速を行う。例えば、ステップ16で、基本変速段として4速が判定され、ステップ14にて減速のために3速ロックアップ状態が判定された場合には、該3速ロックアップ状態に自動変速機を制御する。
【0042】
そして、自動変速機のシフトダウン、スロットルの閉成、ブレーキの動作により、先行車との相対距離が開き、又、相対速度が下がり自動変速機の減速制御が不要になると(S26がYes)、ステップ22へ移行し、車速及びスロットル開度に基づく通常の変速段制御を再開する。
【0043】
なお、上述した実施態様では、イベントの検出により自動変速機のシフトダウンをおこなったが、所定の相対距離、相対速度が検出された際に、直ちに、自動変速機のシフトダウンを行うように制御することも可能である。
【0044】
引き続き、本発明を具体化した第2の実施態様について図6〜図15を参照して説明する。
図6は、本発明の本実施態様に係る車両制御装置の構成を示している。この車両制御装置は、車両用ナビゲーション装置110と、オートマチックトランスミッションと、距離検出装置20により構成されている。
車両用ナビゲーション装置110は、現在位置を検出する現在位置検出部、道路データを保持する道路データ保持部、現在地から目的地への経路探索案内を行う経路探索案内部を有している。
【0045】
ナビゲーション装置110の現在位置検出部は、GPS(グローバルポジショニングセンサ)、ジャイロセンサ、車速センサを備え、これらセンサの出力信号に基づいて、車両の現在地が道路上のいかなる位置であるかを検出している。
道路データ保持部は、CDーROM114を主体とする記憶手段にから構成される。また、オートマチックトランスミッションは、プラネタリギアを主体としたギアトレーン及びギアトレーンの各構成要素を係合、解放して変速段を形成する油圧回路からなる機構部(図中、A/Tという)160と、この機構部160を制御する電気制御回路部(以下、 A/T ECUという)120とを備えている。
【0046】
またナビゲーション装置110には、先行車までの距離を検出するための距離検出装置20が接続されている。
該距離検出装置20は、レーザ光を送出する発信装置26と、先行車にて反射されたレーザ光を受信する受信装置22とから構成されている。
そして、ナビゲーション装置110は、距離検出装置20の出力から先行車との相対速度、相対距離(車間距離)を算出する。
上述した距離検出装置20は、レーザ光を障害物に反射される構成を採用しているが、障害物までの距離を検出する装置としては、電波、超音波等を用いて障害物からの反射波の到達時間、ドプラー効果による周波数の偏位を測定するものの他、CCDカメラを2台用いることもできる。
【0047】
ナビゲーション装置110とA/T ECU120とは、相互に通信線で接続され適宜通信が行なわれる。
またナビゲーション装置110と距離検出装置20とは、相互に通信線で接続され適宜通信が行われる。
A/T ECU120は、アクセルペダルセンサ170及びブレーキペダルセンサ172と接続されており、アクセルペダルセンサ170からはアクセルペダルの踏込み量信号(スロットル開度に対応する)が入力され、ブレーキペダルセンサ172からはブレーキが踏まれたかどうかのブレーキ信号が入力される。さらに、機構部160に取り付けられた図示しないシフトポジションセンサからはシフトレバー174により選択されたシフトポジションに対応したシフトポジション信号が入力され、機構部160に取り付けられた図示しない車速センサからの車速信号が入力される。一方、A/T ECU120から機構部160の油圧回路内のアクチュエータ(油圧ソレノイド)に対して駆動信号が出力され、この駆動信号に基づき上記アクチュエータが作動して変速段の形成等を行う。A/T
【0048】
ECU120は、また、EEPROM22に記憶された制御プログラムにより制御されており、例えば、変速段の選択は、アクセルペダルセンサ170により検出されるアクセルペダルの踏込み量と、機構部160に取り付けられた車速センサからの車速とに基づき、メモリテーブル(変速マップ)に基づき行なわれるように構成されている。この変速マップがオートマチックトランスミッション固有の変速段を決定する。
【0049】
本実施態様では、この固有の変速マップを変化させることなく、変速段の高速側(上限)を制限することにより、結果的に変速段が低速側にシフトされたような制御を実行している。したがって、固有の変速マップとして、どのような変速マップを用いることもできる。
【0050】
シフトレバー174は、パーキングレンジ、リバースレンジ、ニュートラルレンジ、ドライブレンジ、セカンドレンジ、ロウレンジの6つのシフトポジションが選択可能な6ポジションタイプで、機構部160に取り付けられた図示しないシフトポジションセンサと機械的に接続されている。
【0051】
ドライブレンジのシフトポジションでは、1〜4速の間で変速段が選択され、セカンドレンジでは、1〜2速の間で変速段が選択され、ロウレンジでは、1速の変速段のみが設定される。
【0052】
本実施態様では、シフトレバー174がドライブレンジのシフトポジションに保持されている場合にのみ、ナビゲーション装置110による変速段の規制が実行可能な構成となっている。
【0053】
エンジンコントロールユニット130は、スロットル開度の信号と、エンジン150からのエンジン回転数その他(冷却水温、センサ信号等)とに基づき、燃料噴射指令等を変化させて、エンジン150を制御する。
【0054】
次に、CDーROM114に記録された道路データの構造について、図8を参照して説明する。
図8は道路データの構造を模式的に示している。図中で、実線Rは道路の形状を示している。ここで、道路は、ノード点(N1、N2、・・・)と、ノード点を結ぶ線分(以下、リンクという)によって表現される。そして、ノード点は、少なくとも座標(ここでは、絶対座標である緯度・経度)によって定義されている。
【0055】
本実施態様では、道路形状はノード点やリンクのみならず、標高によっても定義される。標高データは、左右上下250m間隔のマトリクス状の各点において保持されており、例えば、図中に10−10で指した地点の標高は20mであり、図中10−11で指した地点の標高点は標高22mというようにデータを持っている。
【0056】
本実施態様では、ノード点の位置と、該ノード点を取り囲む各標高データとの位置関係によって道路勾配を求める。なお、データ量を小さくするため、マトリクス状に標高点を保持しているが、ノード点毎に標高のデータを持つことも可能である。
【0057】
又、道路の区間ごとに、例えば、リンクごとに勾配値を予め持つようにしておいて、これを用いることもできる。
ナビゲーション装置110とA/T ECU120による変速段の選択制御について、図9〜図14のフローチャートを参照して説明する。ここで、図9は、ナビゲーション装置110で実行される処理の一部としての上限設定ルーチンを示している。図10は、A/T ECU120で実行される処理の一部としての変速段出力ルーチンを示している。
【0058】
図9に示すように、上限設定ルーチンは、車間距離制御処理ルーチン(S10)、最適変速段決定処理ルーチン(S30)、コーナー制御ルーチン(S40)、変速段スタンドバイ制御ルーチン(S80)、降坂制御処理ルーチン(S90)、上限指令値選択処理制御ルーチン(S100)から成る。
【0059】
又、図10に示すように、変速段出力ルーチンはEEPROM22の変速マップに基づき、固有の変速段がいかなる変速段であるかを判断し(S190)、上記ナビゲーション装置110側からの変速段上限指令値(いかなる範囲内で変速段を選択可能とする指令)を受信し(S200)、自己の選択した変速段と比較してその範囲内で変速段を決定し(S210)、変速用アクチュエータを駆動すべくA/Tの機構部160に対して指令信号を出力する(S220)。
【0060】
ここで、車間距離制御処理(S10)の内容を説明する。
具体的な内容は、第1実施態様の図5のフローチャートに示される内容と略同様であるので、変更点を中心に説明する。
尚、第1実施態様では制御装置10が図5に示すフローチャートの処理を行ったが、今回の第2実施態様では、ナビゲーション装置110がこの処理を行う。
【0061】
図5における、S14にて最適A/T変速段、T/C状態を決定しているが、第2実施態様における車間距離制御処理では、最適A/T変速段、T/C状態を上限の変速段とする上限指令値を決定する。
すなわち、S14にて図3に示すマップから、例えば最適A/T変速段T/C状態を3速、ロックアップクラッチの状態を係合状態と判定し、S20にてアクセル及びブレーキのイベントがあった際に、上記S14にて判定した変速段及び流体式トルクコンバータの状態(ここでは、3速のロックアップ状態)を上限とする上限指令を設定する(S24)。
【0062】
ここでは、上述したステップ16で決定された変速段よりも、ステップ14にて判定した上限指令値の方が低い際に、該低い上限指令値に従い上限指令値を設定する。
他方、ステップ16で決定された変速段の方が低い場合、または、前記イベントが検出される。
【0063】
図11のフローチャートを参照して最適変速段決定処理(S30)の内容を説明する。
先ず、ナビゲーション装置110は、前方の道路上のノード点ごとにそのノード点を含む所定区間の道路の曲率を算出し(S152)、当該ノード点を含む道路の曲率に応じた推奨車速Vo を検索する(S154)。ここで、特定ノードを含む道路の曲率の算出方法としてはさまざまな方法が有り、いかなる方法も採用できる。例えば、そのノードと隣接する2つのノードに対して曲率をもとめることができる。
【0064】
ナビゲーション装置110には、図7に示す内容の推奨車速検索用マップが用意されており、該マップを検索することでそのノードの地点を通過する場合の推奨車速Vo を求める。
このマップにおいては、道路の曲率が小さくなると、推奨速度Vo が低くなり、反対に、曲率が大きくなると、推奨速度Vo が高くなる。
ここで推奨車速Voが一番低くなるノードの地点(道路の曲率が小さくなる点)を特定ノード点Nとする。
【0065】
次に、現在位置から特定ノード点までの道路勾配を上述したように算出した後(S156)、減速加速度G3と、その値を考慮した減速加速度G2とを設定し、規制用変速段マップ(図15)に基づき、変速段規制制御の必要性を判断する(S158)。
【0066】
図15に示されている規制用変速段マップは、変速段の変更及びロックアップクラッチの制御による減速度合、安全な減速、車両挙動等を考慮して、推奨される減速度を設定し、各減速度に応じて最も適切と思われる変速段を設定したマップである。
この減速加速度G3は、これ以上減速加速度(減速の度合い)が大きい場合は、変速段が3速以下であることが望ましいと考えられる減速加速度であり、減速加速度G2は、これ以上減速加速度(減速の度合い)が大きい場合は、変速段が2速以下であることが望ましい減速加速度である。
【0067】
この減速加速度G3よりも下の領域には、さらに変速段の上限が4速に設定される領域、4速のロックアップスリップ制御が設定される領域、4速のロックアップ制御が設定される領域が同時に設けられる。
また同様に、減速加速度G3よりも大きく、G2よりも小さい領域には、変速段の上限が3速設定される領域、3速のロックアップスリップ制御が設定される領域、3速のロックアップ制御が設定される領域が設けられる。
また同様に、減速加速度G2よりも大きい領域には、さらに変速段の上限が2速に設定される領域、2速のロックアップスリップ制御が設定される領域、2速のロックアップ制御が設定される領域が設けられる。
これは、変速段が低速側にある方が、減速時の車両の安定性と制動に有利であるためと細かな制動力を設定するためである。
【0068】
さらに、この減速加速度という概念は、本実施態様では道路の勾配を考慮した概念となっている。これは、平地において、同じ距離を減速する場合と登坂路又は降坂路を減速する場合とでは、減速の度合いが異なるからである。例えば、登坂路の場合に、運転者が減速の意思を持った場合、積極的にシフトダウンをしなくとも十分な減速が自然にできる場合もあるからである。
【0069】
減速加速度G3、G2を道路の勾配に対応して複数持っていてもよいし、平地用に1つのG3、G2データを持っておいて、勾配データにより補正してもよい。又、このG3、G2データは、車両の重量を算出することにより1名乗車と4名乗車とでは異なる車両の減速加速度に対応するよう補正を行ってもよい。尚、この車両の重量は、例えば、特定の出力軸トルクが発生している場合の加速度によって算出することができる。
【0070】
次に、ナビゲーション装置110は、現在位置から特定ノード点(即ち、推奨車速Vo にて通過する位置)までの区間距離Lを算出する(S160)。
そして、推奨車速Vo に基づき、区間距離Lと減速加速度G3から車速V4ー3を算出する。この車速V4ー3は、区間距離Lを減速加速度G3で減速すると仮定した場合、現在の車速はいかなる値であるかを示すものである。
【0071】
又、推奨車速Vo に基づき、区間距離Lと減速加速度G2から車速V3ー2を算出する。この車速V3ー2は、区間距離Lを減速加速度G2で減速すると仮定した場合、現在の車速はいかなる値であるかを示すものである。
【0072】
次に、車速V4ー3が現在車速Vnow 以下かどうかを判断する(S166)。車速V4ー3が現在車速Vnow 以下であるということは、その時点において、現在車速から推奨車速まで減速する場合、その減速加速度はG3よりも大きな値となることを意味する。上記減速加速度G3は、これ以上減速加速度(減速の度合い)が大きい場合は、変速段が3速以下であることが望ましいと考えられる減速加速度であるので、減速加速度がG3よりも小さな値である場合には、特に変速段の規制は必要なくロックアップクラッチの制御で必要な減速を行い得ると考えられるので、車速V4ー3が現在車速Vnow よりも大きい場合には(S166がNo)、現在車速Vnow が減速加速度G3より下の領域のどの位置に存在するかで、ロックアップクラッチの制御内容を決定する。即ち、本実施態様では、変速段の上限は機構的に4速であるので、最適変速段を4速とし、ロックアップクラッチの状態を解放、スリップ、係合(ロックアップ)のいずれかに設定する旨を決定し(S174)、リターンする。
【0073】
一方、車速V4ー3が現在車速Vnow よりも小さい場合には(S166がYes)、車速V3ー2が現在車速Vnow 以下であるかどうかを判断する(S168)。
【0074】
車速V4ー3が現在車速Vnow 以下で、かつ、車速V3ー2が現在車速Vnow よりも大きい場合には、最適変速段として3速、ロックアップクラッチの状態を解放、スリップ、係合(ロックアップ)のいずれかに決定し(S172)、リターンする。即ち、この場合には、変速段が3速以下であることが望ましいが2速以下であることが要求されていない場合である。
【0075】
車速V4ー3が現在車速Vnow 以下で、かつ、車速V3ー2も現在車速Vnow 以下の場合には、最適変速段として2速、
ロックアップクラッチの状態を解放、スリップ、係合(ロックアップ)のいずれかに決定し(S170)、リターンする。即ち、この場合には、変速段が2速以下であることが望ましい場合である。
【0076】
コーナー制御(S40)について、当該処理のサブルーチンを示す図12を参照して説明する。
先ず、ステップS62では、ナビゲーション装置110は、ステップS170、ステップS172、ステップS174で決定された最適変速段Nが4速、3速、2速のいずれであるかを判断する(S62)。
【0077】
最適変速段として4速が選択されているときには、変速段の上限としての4速及び決定されたロックアップクラッチの状態を指令して(S78)、当該ルーチンの処理を終了してメインルーチンへリターンする。
【0078】
他方、3速が選択されているときには、ステップS68へ進み、アクセルペダルが踏まれている状態からオフ状態になったか、或いは、ブレーキペダルが踏まれていない状態から踏まれている状態になったか否かを判断する(S68)。なお、ここで、アクセルペダルが踏まれている状態からオフ状態になったか否かという運転者の動作の変化があったことをイベント有りという。また、ブレーキペダルが踏まれていない状態から踏まれている状態になったか否かについても同様である。
【0079】
そして、アクセルペダルオフ変化、或いは、ブレーキペダルオン変化の動作が生じない限り(S68がNo)、制御を行うことなくリターンする。即ち、本実施態様では何も制御しないことを意味する上限4速でロックアップクラッチを解放させる旨の指令値を設定する。
他方、アクセルペダルオフ変化、或いは、ブレーキペダルオン変化の動作があった際には(S68がYes)、3速を上限とし、及び決定されたロックアップクラッチの状態を指令する旨の指令値を設定する(S77)。
【0080】
ここで、上述したステップS62において、最適変速段として2速が選択されているときには、ステップS70へ進み、ブレーキペダルがオン変化があったか否かを判断する(S70)。そして、ブレーキペダルがオフからオンへの変化がない限り(S70がNo)、3速を上限とし、ロックアップクラッチを解放させる旨の指令値を設定する(S77)。即ち、最適変速段が2速の場合は、アクセルオフイベントがなくとも3速を上限とする指令値を設定されることになる。
【0081】
一方、ブレーキペダルがオフからオンになった場合には(S70がYes)、ステップS76へ進み2速を上限とし、及び決定されたロックアップクラッチの状態を指令する旨の指令値を設定する。
この2速や、3速の指令値は、そのままA/T ECU120に出力されるのでなく、後述するように、他の制御(車間距離制御処理、変速段スタンドバイ処理、降坂制御処理)に設定される指令値と併せて比較判断し、最も低い変速段の指令値がこのナビゲーション装置110の上限設定ルーチンにおいて決定される。
【0082】
次に、図13に示す変速段スタンドバイ処理(ステップ80)を説明する。
この処理は、上記イベントがあった時点では変速段の制限が必要ないと判断され、その後、イベントが生じない場合に対処する制御である。
【0083】
図13に示すように、スタンドバイ処理用マップから変速段を判断する(S81)。スタンドバイ処理用マップに基づき、4速と判断した場合、上限4速を指令し、2速と判断した場合、上限2速を指令し(S83)、リターンする。また、3速と判断した場合、上限3速を指令し(S84)、リターンする。スタンドバイ処理用マップは、車速のみをパラメータとしており、車速に対応して変速段が判断されることとなっている。これは、アクセルペダルがオフ状態となっていることを想定したものである。
【0084】
尚、スタンドバイ処理用マップの内容に車速の外に他の要素を用いたマップを使用してもよく、又、マップの適用条件として、ブレーキのオン状態等の条件を付加してもよい。
【0085】
次に、降坂制御(ステップ90)を説明する。
この処理は、算出された道路の勾配(S156にて算出)に対処する制御である。
図16に示す様に、検出された道路の降り勾配の程度と車速に応じて予め設定された勾配処理用マップにより、勾配の程度に応じた変速段の上限を設定する。
このマップは、同じ車速で比較すると、勾配の程度が大きくなる程、変速段の上限を3速、上限を2速と規制するように作られている。
【0086】
これは、一般的に、車両が下り坂を走行する場合には、最高速段(ここでは4速)で走行するとエンジンブレーキ力不足を感じる場合があり、3速もしくは2速といった低速段側のギヤで走行してエンジンブレーキを効かせて走行した方が、安定して走行させることができる点を考慮したためである。
このため、降り坂を走行する場合は、勾配の程度および車速に応じて、上限が例えば3速に規制されることで、最高速段(ここでは4速)が選択れることがないので、十分にエンジンブレーキを効かせて走行することができる。
【0087】
またさらにこの変速段の上限は、当然の事ながら、ロックアップクラッチの係合制御を含んでいる。
すなわち、前期勾配処理マップにおいて、勾配値と車速に応じて、変速段の上限が4速に設定される領域、4速のロックアップスリップ制御が設定される領域、4速のロックアップ制御が設定される領域、上限が3速に設定される領域、3速のロックアップスリップ制御が設定される領域、3速のロックアップ制御が設定される領域、変速段の上限が2速に設定される領域、2速のロックアップスリップ制御が設定される領域、2速のロックアップ制御が設定される領域が各々設けられる。
これは、車両が降り道路を走行する場合に細かなエンジンブレーキ力を設定するためである。またエンジンのシフトダウンによるオーバーレブを考慮して、勾配が同じでも車速が高くなるほど上限を高く設定する。
【0088】
図14に上限指令値選択処理(ステップ100の)を示す。
ナビゲーション装置110は、ステップ10の車間距離制御処理ルーチン、ステップ40のコーナー処理ルーチン、ステップ80の変速段スタンドバイ制御ルーチン(ステップ90の降坂制御ルーチン)のそれぞれにおいて決定された上限指令のうち、一番上限の最も低いものを選択する(S102)。
【0089】
即ち、例えば、車間距離制御ルーチン(S10)で3速が指令値として設定され、コーナー処理ルーチン(S40)で3速が指令値として設定され、変速段スタンドバイ制御ルーチン(S80)で2速が指令値として設定され、降坂制御処理ルーチン(S90)で3速が指令値として設定された場合には、2速を指令値として設定する。
また、コーナー処理ルーチン(S40)で3速ロックアップ係合状態が指令値として設定され、変速段スタンドバイ制御ルーチン(S80)及びその他の制御(S10、S40、S90)で3速が指令値として設定された場合には、3速ロックアップ係合状態を指令値として設定する。このように上限の変速段が同じ場合には、ロックアップクラッチの係合状態により優先順位を決定するのである。
【0090】
この優先順位は、ロックアップクラッチ係合状態が一番高く、ロックアップクラッチスリップ状態が次ぎに高く、ロックアップクラッチ解放状態が一番低くなる。
そして、ステップ102で選択した上限指令値をA/T ECU120へ指令する(S104)。この指令値をA/T ECU120は、上述したステップ200で受信する。
【0091】
本実施態様では、アクセルペダルセンサとブレーキペダルセンサが運転者の動作を検出する動作検出手段として用いられているが、運転者の動作を検出する手段としては、さらにステアリングの回動又はその代用特性を検出するためのステアリングセンサ、ウインカーの指示がされたかどうかを検出するセンサ、あるいは視線や脳波から運転者のしようとする動作を間接的に検出するセンサを動作検出手段として用いることもできる。
【0092】
本実施態様では、最適変速段の如何に関らず、4速から直接2速にシフトダウンされることが防止されている。これは、滑らかな減速を可能にするためである。また、2速へのシフトダウンはブレーキペダルを踏み込む動作に基づいて行なわれる。これは2速のエンジンブレーキが、3速よりも大きいことを考慮して、運転者の減速しようというより明確な意思を確認するためである。又、3速へのシフトダウンをアクセルオフに基づいて行うのは、そのような、運転者の動作、車両の操作こそが運転者の意思の現れであり、運転者はその時少なくとも加速を望んでおらず、又、自己の行為に起因して車両がシフトダウンに対応した挙動を示すので、違和感がなく、かつ運転者の意思にそったものと成りやすいためである。
【0093】
本実施態様では、ナビゲーション装置110とA/T ECU120が通信によって、夫々の制御を行っている。しかしながら、この制御はどちらの装置が全部行ってもよいし、又、分担を新たに決めることもできる。たとえば、道路データから最適変速段を決定するルーチン(実施態様における「最適変速段決定処理ルーチン」)のみをナビゲーション装置110に実行させ、アクセルペダル又はブレーキペダルの変化により変速段を選択する範囲を決定する指令を出力するルーチン(実施態様における「コーナー処理ルーチン」)はA/T ECU120でおこなうこととしてもよい。この場合、実施態様では、アクセルセンサ及びブレーキセンサの信号がA/T ECU 120に入力されるので、通信の無駄が少なくなる。
【0096】
【効果】
請求項1の発明では、前方車両との距離、相対速度及び自車速度が測定され、即ち、前方車両との接近が検出された際に、シフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調整することができる。また、運転者による減速動作の開始(アクセルペダルのオフ、ブレーキペダルのオン)を検出したタイミングで自動変速機のシフトダウンを行うため、運転者に違和感を与えることなく減速して、前方車への追突を回避することができる。
【0097】
請求項2〜5の発明では、前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じて、シフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
また、運転者による減速動作の開始(アクセルペダルのオフ、ブレーキペダルのオン)を検出したタイミングで自動変速機のシフトダウンを行うため、運転者に違和感を与えることなく減速して、カーブを円滑に走行し得るように変速段を自動的に切り替えることができる。
【0098】
請求項6の発明では、前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じてシフトダウンを行う制御と、道路の勾配と現在車速に応じてシフトダウンを行う制御のいずれか1つを選択して、道路の状況及び走行状況に対応してシフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
【0099】
請求項7の発明では、前方のカーブとみなされた特定点と現在地間の距離と、前記特定点の推奨走行速度と現在車速との速度差に応じてシフトダウンを行う制御と、道路の勾配と現在車速に応じてシフトダウンを行う制御と、前方車両との距離、相対速度及び自車速度が測定され、即ち、前方車両との接近が検出された際に、シフトダウンを行う制御のいずれか1つを選択して、道路の状況及び走行状況に対応してシフトダウンを行うが、シフトダウンを行う際に、ロックアップクラッチのスリップ量を制御することで、運転者に違和感を与えない範囲にエンジンブレーキの効かせ方を調節することができる。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係る自動変速機の制御装置の構成を示すブロック図である。
【図2】自動変速機の構成を示す構成図である。
【図3】制御装置による自動変速機の減速制御用のマップの説明図である。
【図4】図4(A)、図4(B)、図4(C)は、先行車と自車との相対距離及び自車速度の関係を示す説明図である。
【図5】制御装置による自動変速機の減速制御を示すフローチャートである。
【図6】本発明の本実施態様に係る変速段制御を行う車両制御装置のブロック図である。
【図7】推奨車速のカーブの曲率との関係を示すグラフである。
【図8】本実施態様の道路データの内容を示す説明図である。
【図9】本実施態様のナビゲーション装置による上限設定ルーチンを示すフローチャートである。
【図10】A/T ECUによる変速段出力ルーチンを示すフローチャートである。
【図11】図9に示す最適変速段決定処理のサブルーチンを示すフローチャートである。
【図12】図9に示すコーナー処理のサブルーチンを示すフローチャートである。
【図13】図9に示す変速段スタンドバイ処理のサブルーチンを示すフローチャートである。
【図14】図9に示す上限指令値選択処理のサブルーチンを示すフローチャートである。
【図15】変速段を制御を説明するためのグラフである。
【図16】自車速度と勾配とのグラフである。
【符号の説明】
10 制御装置
20 距離検出装置
22 受信装置
26 発信装置
32 車速センサ
38 アクセルセンサ
39 ブレーキスイッチ
100 流体式トルクコンバータ
106 ロックアップクラッチ
110 ナビゲーション装置
120 A/T ECU
130 E/G ECU
150 エンジン
160 オートマチックトランスミッション
170 アクセルペダル
172 ブレーキペダル
174 シフトレバー
Claims (7)
- トルクコンバータ内のロックアップクラッチをスリップ制御し得る自動変速機の制御装置であって、
運転者による減速動作の開始を検出する減速操作検出手段と、
前方車両との距離及び相対速度を検出する速度検出手段と、
前記速度検出手段により検出された前方車両との距離、相対速度、及び、自車速度に応じ、相対速度毎に用意され一方の軸上に相対距離、他方の軸上に自車速度を取ったマップであって、相対距離及び自車速度に応じた変速段と共に、各変速段でのスリップ量、各変速段でのロックアップの要否を決定するマップを用いて自動変速機の変速段及びトルクコンバータのロックアップクラッチの係合状態の制御量を決定する制御量決定手段と、
前記減速操作検出手段により、運転者による減速動作の開始が検出された際に、前記制御量決定手段により決定された制御量に従い自動変速機を制御する制御手段と、を備えることを特徴とする自動変速機の制御装置。 - 道路データを記憶する道路データ記憶手段と、
現在地を検出する現在地検出手段と、
自車の車速を検出する車速検出手段と、
自車位置の進行方向にある特定点の推奨走行速度を算出する推奨走行速度算出手段と、
運転者による減速動作の開始を検出する減速操作検出手段と、
前記特定点と現在地間の距離及び前記特定点の推奨走行速度と現在の車速との速度差に応じ、一方の軸上に速度差、他方の軸上に距離を取ったマップであって、速度差及び距離に応じた変速段と共に、各変速段でのスリップ量、各変速段でのロックアップの要否を決定するマップを用いて自動変速機の変速段及びトルクコンバータのロックアップクラッチの係合状態の制御量を決定する第1の制御量決定手段と、
前記減速操作決定手段により、運転者による減速の開始が検出された際に、
前記第1の制御量決定手段により決定された制御量に従い自動変速機を制御する制御手段と、を備えることを特徴とする自動変速機の制御装置。 - 前記特定点は道路形状を表現するノードを基準として定めたことを特徴とする請求項2に記載の自動変速機の制御装置。
- 前記減速操作検出手段が、運転者によるアクセルペダルのオフ操作を検出することを特徴とする請求項2、又は3に記載の自動変速機の制御装置。
- 前記減速操作検出手段が、運転者によるブレーキペダルのオン操作を検出することを特徴とする請求項2、3、4のいずれか1つに記載の自動変速機の制御装置。
- さらに、道路の勾配を検出する勾配検出手段と、
前記勾配検出手段により検出された勾配と車速に応じて、自動変速機の変速段及びトルクコンバータのロックアップクラッチの係合状態の制御量を決定する第2の制御量決定手段とを有し、
前記制御手段は、
前記第1の制御量決定手段により決定された第1の制御量と、第2の制御量決定手段により決定された第2の制御量の何れか1つに従い自動変速機を制御することを特徴とする請求項2、3、4、5のいずれか1つに記載の自動変速機の制御装置。 - さらに、前方車両との距離及び相対速度を検出する速度検出手段と、
前記速度検出手段により検出された前方車両との距離、相対速度、及び自車速度に応じて自動変速機の制御量を決定する第3の制御量決定手段とを有し、
前記制御手段は、
前記第1の制御量決定手段により決定された第1の制御量と、前記第2の制御量決定手段により決定された第2の制御量と、前記第3の制御量決定手段により決定された第3の制御量の何れか1つに従い自動変速機を制御することを特徴とする請求項2、3、4、5、6のいずれか1つに記載の自動変速機の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25591597A JP4190041B2 (ja) | 1997-09-04 | 1997-09-04 | 自動変速機の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP25591597A JP4190041B2 (ja) | 1997-09-04 | 1997-09-04 | 自動変速機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1182731A JPH1182731A (ja) | 1999-03-26 |
| JP4190041B2 true JP4190041B2 (ja) | 2008-12-03 |
Family
ID=17285343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP25591597A Expired - Fee Related JP4190041B2 (ja) | 1997-09-04 | 1997-09-04 | 自動変速機の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4190041B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11046181B2 (en) | 2019-06-11 | 2021-06-29 | Hyundai Motor Company | Apparatus and method for controlling transmission of vehicle |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4608706B2 (ja) * | 1999-03-31 | 2011-01-12 | 株式会社エクォス・リサーチ | 車両制御装置 |
| JP2005147292A (ja) * | 2003-11-17 | 2005-06-09 | Toyota Motor Corp | 変速機の変速制御装置及び変速機の変速制御方法 |
| JP4517710B2 (ja) * | 2004-04-26 | 2010-08-04 | トヨタ自動車株式会社 | 変速機の制御装置 |
| JP2007078167A (ja) * | 2005-09-16 | 2007-03-29 | Toyota Motor Corp | 車両の減速制御装置 |
| JP4946021B2 (ja) * | 2005-12-01 | 2012-06-06 | トヨタ自動車株式会社 | 変速機の制御装置 |
| JP4816112B2 (ja) * | 2006-01-31 | 2011-11-16 | トヨタ自動車株式会社 | 車両用駆動力制御装置 |
| JP4689546B2 (ja) * | 2006-07-06 | 2011-05-25 | 本田技研工業株式会社 | 車両用物体検出装置 |
| CN110758416B (zh) * | 2019-10-31 | 2020-11-10 | 北京易控智驾科技有限公司 | 无人驾驶矿车档位限制的控制系统及控制方法 |
-
1997
- 1997-09-04 JP JP25591597A patent/JP4190041B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11046181B2 (en) | 2019-06-11 | 2021-06-29 | Hyundai Motor Company | Apparatus and method for controlling transmission of vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH1182731A (ja) | 1999-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4168585B2 (ja) | 車両制御装置 | |
| US11009872B2 (en) | Vehicle controller | |
| KR100261364B1 (ko) | 변속기의 제어장치 | |
| KR100582491B1 (ko) | 차량의 감속 제어 장치 및 차량의 감속 제어 방법 | |
| US6626797B2 (en) | Vehicular control apparatus and method for controlling automatic gear change | |
| JPH10184877A (ja) | 有段変速機の制御装置 | |
| JP4531876B2 (ja) | 車輌の変速制御装置 | |
| US6725144B2 (en) | Control apparatus and applicable control method and control program for vehicle | |
| JP4190041B2 (ja) | 自動変速機の制御装置 | |
| JP2000120859A (ja) | 自動変速機の制御装置 | |
| JP2000127803A (ja) | 車両の運転指向推定装置 | |
| JP4697990B2 (ja) | 車輌の変速制御装置 | |
| JPH10299890A (ja) | 車両制御装置 | |
| JP3973421B2 (ja) | 車輌用制御装置及び当該制御方法、並びに当該制御プログラム | |
| JP2005172164A (ja) | 車両の制御装置 | |
| US11618437B2 (en) | Control apparatus of power transmission system for vehicle | |
| JP4531879B2 (ja) | 車輌の変速制御装置 | |
| JP4531878B2 (ja) | 車輌の変速制御装置 | |
| JP3091421B2 (ja) | 車両制御装置 | |
| JP2003301941A (ja) | 車両用自動変速機の制御装置 | |
| JP2007016826A (ja) | 運転者指向判定装置 | |
| JP3737882B2 (ja) | 車両の制御装置 | |
| JP3552680B2 (ja) | 車両制御装置 | |
| JP3156786B2 (ja) | 車両制御装置 | |
| JP3173000B2 (ja) | 車両制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040902 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040902 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20050908 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070925 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080513 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080916 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080916 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110926 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110926 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120926 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120926 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130926 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |