JP2020519433A - 超音波自己洗浄システム - Google Patents
超音波自己洗浄システム Download PDFInfo
- Publication number
- JP2020519433A JP2020519433A JP2019561134A JP2019561134A JP2020519433A JP 2020519433 A JP2020519433 A JP 2020519433A JP 2019561134 A JP2019561134 A JP 2019561134A JP 2019561134 A JP2019561134 A JP 2019561134A JP 2020519433 A JP2020519433 A JP 2020519433A
- Authority
- JP
- Japan
- Prior art keywords
- optical component
- cleaning
- self
- thin film
- cleaned
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 71
- 230000003287 optical effect Effects 0.000 claims abstract description 134
- 238000000034 method Methods 0.000 claims abstract description 28
- 238000003860 storage Methods 0.000 claims description 28
- 239000010409 thin film Substances 0.000 claims description 25
- 230000005284 excitation Effects 0.000 claims description 20
- 238000012545 processing Methods 0.000 claims description 19
- 238000004590 computer program Methods 0.000 claims description 11
- 239000012790 adhesive layer Substances 0.000 claims description 5
- 238000005303 weighing Methods 0.000 claims 1
- 238000010586 diagram Methods 0.000 abstract description 20
- 230000009471 action Effects 0.000 description 24
- 239000010410 layer Substances 0.000 description 13
- 230000006870 function Effects 0.000 description 10
- 239000012528 membrane Substances 0.000 description 10
- 239000011248 coating agent Substances 0.000 description 9
- 238000000576 coating method Methods 0.000 description 9
- 239000000463 material Substances 0.000 description 9
- 230000008859 change Effects 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 5
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 239000000356 contaminant Substances 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 229920000515 polycarbonate Polymers 0.000 description 4
- 239000004417 polycarbonate Substances 0.000 description 4
- 239000010453 quartz Substances 0.000 description 4
- 230000001960 triggered effect Effects 0.000 description 4
- 239000010408 film Substances 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 238000003306 harvesting Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- 238000002834 transmittance Methods 0.000 description 3
- 238000011282 treatment Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 229920006397 acrylic thermoplastic Polymers 0.000 description 2
- 230000003466 anti-cipated effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000007772 electrode material Substances 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 230000002209 hydrophobic effect Effects 0.000 description 2
- 238000010801 machine learning Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229920003229 poly(methyl methacrylate) Polymers 0.000 description 2
- 230000001902 propagating effect Effects 0.000 description 2
- 229910052594 sapphire Inorganic materials 0.000 description 2
- 239000010980 sapphire Substances 0.000 description 2
- ISXSCDLOGDJUNJ-UHFFFAOYSA-N tert-butyl prop-2-enoate Chemical compound CC(C)(C)OC(=O)C=C ISXSCDLOGDJUNJ-UHFFFAOYSA-N 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229920001651 Cyanoacrylate Polymers 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 238000005299 abrasion Methods 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- NLCKLZIHJQEMCU-UHFFFAOYSA-N cyano prop-2-enoate Chemical class C=CC(=O)OC#N NLCKLZIHJQEMCU-UHFFFAOYSA-N 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- -1 dirt Substances 0.000 description 1
- 230000005670 electromagnetic radiation Effects 0.000 description 1
- 239000003822 epoxy resin Substances 0.000 description 1
- 239000005350 fused silica glass Substances 0.000 description 1
- LNEPOXFFQSENCJ-UHFFFAOYSA-N haloperidol Chemical compound C1CC(O)(C=2C=CC(Cl)=CC=2)CCN1CCCC(=O)C1=CC=C(F)C=C1 LNEPOXFFQSENCJ-UHFFFAOYSA-N 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 229920000647 polyepoxide Polymers 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- ZDHXKXAHOVTTAH-UHFFFAOYSA-N trichlorosilane Chemical compound Cl[SiH](Cl)Cl ZDHXKXAHOVTTAH-UHFFFAOYSA-N 0.000 description 1
- 239000005052 trichlorosilane Substances 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B13/00—Accessories or details of general applicability for machines or apparatus for cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B7/00—Cleaning by methods not provided for in a single other subclass or a single group in this subclass
- B08B7/02—Cleaning by methods not provided for in a single other subclass or a single group in this subclass by distortion, beating, or vibration of the surface to be cleaned
- B08B7/026—Using sound waves
- B08B7/028—Using ultrasounds
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M11/00—Testing of optical apparatus; Testing structures by optical methods not otherwise provided for
- G01M11/02—Testing optical properties
- G01M11/0242—Testing optical properties by measuring geometrical properties or aberrations
- G01M11/0278—Detecting defects of the object to be tested, e.g. scratches or dust
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0006—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means to keep optical surfaces clean, e.g. by preventing or removing dirt, stains, contamination, condensation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/06—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction
- B06B1/0644—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction using a single piezoelectric element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/56—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H1/00—Measuring characteristics of vibrations in solids by using direct conduction to the detector
- G01H1/04—Measuring characteristics of vibrations in solids by using direct conduction to the detector of vibrations which are transverse to direction of propagation
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Geometry (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Cleaning In General (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Camera Bodies And Camera Details Or Accessories (AREA)
Abstract
Description
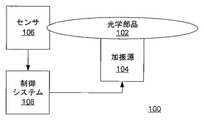
102 光学部品
104 加振源
106 センサ
108 制御システム
Claims (22)
- 光学部品を洗浄するための方法であって、
前記光学部品の状態を測定することと、
前記光学部品が洗浄される必要があるかどうかを前記光学部品の前記測定された状態に基づいて判定することと、
前記光学部品が洗浄される必要がある場合に超音波振動で前記光学部品を洗浄することと、
を含む、方法。 - 前記光学部品の前記状態を測定することが、
光源で光を生成することと、
前記光が前記光学部品と相互作用した後に前記生成された光の強度を測定することと、
を含む、請求項1に記載の方法。 - 前記光学部品の前記状態を測定することが、前記光学部品の重さを量ることを含む、請求項1ないし2のいずれか一項に記載の方法。
- 前記光学部品の前記状態を測定することが、
複数の異なる周波数で前記光学部品を振動させることと、
前記複数の異なる周波数の各々で前記光学部品の振動振幅を測定することと、
を含む、請求項1ないし3のいずれか一項に記載の方法。 - 前記光学部品が洗浄される必要があるかどうかを判定することが、前記光学部品の前記測定された状態をきれいであると知られた値と比較することを含む、請求項1ないし4のいずれか一項に記載の方法。
- 前記光学部品が洗浄される必要があるかどうかを判定することが、前記光学部品の前記測定された状態と前記きれいであると知られた値との差を閾値と比較することを含む、請求項5に記載の方法。
- 前記光学部品を洗浄することが、前記光学部品と接触するトランスデューサ用いて超音波振動を生成することを含む、請求項1ないし6のいずれか一項に記載の方法。
- 前記光学部品を洗浄することが、前記光学部品上の薄膜と接触する圧電素子を用いて超音波振動を生成することを含む、請求項1ないし7のいずれか一項に記載の方法。
- 前記光学部品がレンズである、請求項1ないし8のいずれか一項に記載の方法。
- 光学部品と、
前記光学部品の状態を測定するように構成されたセンサと、
前記光学部品の前記測定された状態に基づいて前記光学部品が洗浄される必要があるかどうかを判定するように構成された制御システムと、
前記光学部品が洗浄される必要がある場合に超音波振動で前記光学部品を洗浄するように構成された加振源と、
を備える、自己洗浄光学部品システム。 - 前記センサが、
光を生成するように構成された光源と、
前記光が前記光学部品と相互作用した後に前記生成された光の強度を測定するように構成された光センサと、
を備える、請求項10に記載の自己洗浄光学部品システム。 - 前記センサが、前記光学部品の重さを量るように構成された重量センサを備える、請求項10または11のいずれかに記載の自己洗浄光学部品システム。
- 前記センサが、
複数の異なる周波数で前記光学部品を振動させるように構成された加振源と、
前記複数の異なる周波数の各々で前記光学部品の振動振幅を測定するように構成された振動センサと、
を備える、請求項10ないし12のいずれか一項に記載の自己洗浄光学部品システム。 - 前記制御システムが、前記光学部品の前記測定された状態をきれいであると知られた値と比較するように構成される、請求項10ないし13のいずれか一項に記載の自己洗浄光学部品システム。
- 前記制御システムが、
前記光学部品の前記測定された状態と前記きれいであると知られた値との差を閾値と比較するようにさらに構成される、請求項14に記載の自己洗浄光学部品システム。 - 前記加振源が、前記光学部品と接触するトランスデューサを備える、請求項10ないし15のいずれか一項に記載の自己洗浄光学部品システム。
- 前記加振源が、前記光学部品の薄膜と接触する圧電素子を備える、請求項10ないし16のいずれか一項に記載の自己洗浄光学部品システム。
- 前記薄膜が、第1の接着層によって前記光学部品に貼り付けられる、請求項17に記載の自己洗浄光学部品システム。
- 前記光学部品がレンズである、請求項10ないし18のいずれか一項に記載の自己洗浄光学部品システム。
- 前記システムが、
前記レンズを覆う薄膜と、
前記薄膜の状態を測定するように構成されたセンサと、
を備え、前記制御システムが、前記薄膜の前記測定された状態をきれいであると知られた値と比較して前記薄膜が洗浄される必要があるかどうかを判定するように構成された制御システムを備え、
前記加振源が、前記薄膜が洗浄される必要がある場合に超音波振動で前記薄膜を洗浄するように構成された前記薄膜上の圧電式加振源を備える、請求項19に記載の自己洗浄光学部品システム。 - 光学部品を洗浄するためのコンピュータ・プログラム製品であって、
処理回路によって読み取り可能であって、請求項1ないし9のいずれか一項に記載の方法を実行するために前記処理回路によって実行するための命令を記憶する、コンピュータ可読記憶媒体
を備える、コンピュータ・プログラム製品。 - 請求項1ないし9のいずれか一項に記載の方法を実行するための、コンピュータ可読媒体に記憶されたコンピュータ・プログラムであり、前記プログラムがコンピュータで実行されるとき、ソフトウェア・コード部分を備える、デジタル・コンピュータの内部メモリにロード可能なコンピュータ・プログラム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/593,605 US10527843B2 (en) | 2017-05-12 | 2017-05-12 | Ultra-sonic self-cleaning system |
| US15/593,605 | 2017-05-12 | ||
| US15/806,698 | 2017-11-08 | ||
| US15/806,698 US10520723B2 (en) | 2017-05-12 | 2017-11-08 | Ultra-sonic self-cleaning system |
| PCT/IB2018/052692 WO2018207041A1 (en) | 2017-05-12 | 2018-04-18 | Ultra-sonic self-cleaning system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020519433A true JP2020519433A (ja) | 2020-07-02 |
| JP2020519433A5 JP2020519433A5 (ja) | 2020-08-13 |
Family
ID=64096063
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019561134A Pending JP2020519433A (ja) | 2017-05-12 | 2018-04-18 | 超音波自己洗浄システム |
Country Status (6)
| Country | Link |
|---|---|
| US (3) | US10527843B2 (ja) |
| JP (1) | JP2020519433A (ja) |
| CN (1) | CN110612480B (ja) |
| DE (1) | DE112018000917T5 (ja) |
| GB (1) | GB2577416B (ja) |
| WO (1) | WO2018207041A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022004060A1 (ja) * | 2020-07-03 | 2022-01-06 | 株式会社村田製作所 | 洗浄装置、洗浄装置を備える撮像ユニット、および制御方法 |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10384239B2 (en) | 2016-09-27 | 2019-08-20 | Texas Instruments Incorporated | Methods and apparatus for ultrasonic lens cleaner using configurable filter banks |
| US10682675B2 (en) | 2016-11-01 | 2020-06-16 | Texas Instruments Incorporated | Ultrasonic lens cleaning system with impedance monitoring to detect faults or degradation |
| US11237387B2 (en) | 2016-12-05 | 2022-02-01 | Texas Instruments Incorporated | Ultrasonic lens cleaning system with foreign material detection |
| US10695805B2 (en) | 2017-02-03 | 2020-06-30 | Texas Instruments Incorporated | Control system for a sensor assembly |
| US10663418B2 (en) | 2017-02-03 | 2020-05-26 | Texas Instruments Incorporated | Transducer temperature sensing |
| US11042026B2 (en) | 2017-02-24 | 2021-06-22 | Texas Instruments Incorporated | Transducer-induced heating and cleaning |
| US11420238B2 (en) | 2017-02-27 | 2022-08-23 | Texas Instruments Incorporated | Transducer-induced heating-facilitated cleaning |
| US11607704B2 (en) | 2017-04-20 | 2023-03-21 | Texas Instruments Incorporated | Methods and apparatus for electrostatic control of expelled material for lens cleaners |
| US10780467B2 (en) | 2017-04-20 | 2020-09-22 | Texas Instruments Incorporated | Methods and apparatus for surface wetting control |
| US10908414B2 (en) | 2017-05-10 | 2021-02-02 | Texas Instruments Incorporated | Lens cleaning via electrowetting |
| US10527843B2 (en) * | 2017-05-12 | 2020-01-07 | International Business Machines Corporation | Ultra-sonic self-cleaning system |
| EA039904B1 (ru) * | 2017-12-28 | 2022-03-25 | Кимикал Холдинг Инк. | Автоматическая установка для очистки пресс-форм для шин |
| DE102018100805A1 (de) * | 2018-01-16 | 2019-07-18 | Connaught Electronics Ltd. | Reinigungsvorrichtung zum Reinigen eines lichtdurchlässigen Frontelements eines optischen Sensors für ein Kraftfahrzeug, Anordnung sowie Verfahren |
| US20190322245A1 (en) * | 2018-04-23 | 2019-10-24 | Dlhbowles, Inc. | Vehicle sensor cleaning system and method for operating same |
| EP3794331B1 (en) * | 2018-05-15 | 2023-12-13 | Carrier Corporation | Vibration based actuator system for cleaning of optical surface |
| CN109739010B (zh) * | 2018-12-06 | 2020-11-27 | 同济大学 | 一种自清洁离轴三反射镜装置 |
| US11448873B2 (en) | 2019-09-23 | 2022-09-20 | Cnh Industrial Canada, Ltd. | System and method for cleaning vision sensors of an agricultural machine |
| EP4065938B1 (en) * | 2019-11-29 | 2023-10-25 | AMS Sensors Singapore Pte. Ltd. | Apparatus for monitoring mechanical integrity of an eye-safety component of an illuminator |
| TWI740346B (zh) * | 2020-01-10 | 2021-09-21 | 茂達電子股份有限公司 | 異物偵測系統及方法 |
| DE102020102352B4 (de) | 2020-01-31 | 2021-12-02 | Audi Aktiengesellschaft | Verfahren zum Planen einer Fahrt mit einem Kraftfahrzeug, Fahrtvorbereitungseinrichtung, und Kraftfahrzeug |
| US11719928B2 (en) * | 2020-09-28 | 2023-08-08 | Waymo Llc | Cleaning for rotating sensors |
| CN112147120A (zh) * | 2020-10-19 | 2020-12-29 | 赵启涛 | 自带超声清洁功能的荧光溶解氧传感膜及制备方法与应用 |
| CN112904594A (zh) * | 2021-01-28 | 2021-06-04 | 维沃移动通信有限公司 | 智能穿戴设备 |
| DE102021206782A1 (de) | 2021-06-30 | 2023-01-05 | Robert Bosch Gesellschaft mit beschränkter Haftung | Sensorreinigungssystem und -verfahren |
| US12025482B2 (en) * | 2022-02-09 | 2024-07-02 | Simmonds Precision Products, Inc. | Contamination detection for optical pressure sensors |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0415146A (ja) * | 1990-05-08 | 1992-01-20 | Seiko Epson Corp | 窓払拭装置 |
| JPH04123756U (ja) * | 1991-04-19 | 1992-11-10 | 株式会社ゼクセル | ウインドガラスの霜除け装置 |
| JP2010226395A (ja) * | 2009-03-23 | 2010-10-07 | Canon Inc | 撮像装置、その制御方法及びプログラム |
| WO2012157407A1 (ja) * | 2011-05-13 | 2012-11-22 | 富士フイルム株式会社 | 撮像装置及び合焦制御方法 |
| JP2016064397A (ja) * | 2014-07-03 | 2016-04-28 | アスモ株式会社 | 液滴除去方法及び液滴除去装置 |
| WO2016085999A1 (en) * | 2014-11-26 | 2016-06-02 | Nec Laboratories America, Inc. | Open path optical sensing system having an ultrasonic cleaner and method |
| JP2016527138A (ja) * | 2013-07-22 | 2016-09-08 | エコーヴィスタ ゲーエムベーハーEchovista Gmbh | 降水の超音波清掃 |
| US20160266379A1 (en) * | 2015-03-11 | 2016-09-15 | Texas Instruments Incorporated | Ultrasonic lens cleaning system with current sensing |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS519412B1 (ja) | 1969-01-04 | 1976-03-26 | ||
| JPS5752548B2 (ja) | 1973-12-25 | 1982-11-08 | ||
| JPS5913087B2 (ja) | 1974-07-12 | 1984-03-27 | パイオニア株式会社 | 磁気録音再生装置 |
| JPS58139112A (ja) | 1982-02-12 | 1983-08-18 | Omron Tateisi Electronics Co | 光電スイツチ |
| JP2006035139A (ja) | 2004-07-28 | 2006-02-09 | Ptc Engineering:Kk | 超音波洗浄装置 |
| JP4315448B2 (ja) | 2004-08-31 | 2009-08-19 | 京セラキンセキ株式会社 | 光学ローパスフィルタ及びそれを使用した光学機器 |
| US8473262B2 (en) * | 2008-08-14 | 2013-06-25 | ARETé ASSOCIATES | Self-cleaning submerged instrumentation |
| JP5109412B2 (ja) | 2007-03-02 | 2012-12-26 | セイコーエプソン株式会社 | 防塵基板及びそれを用いた電気光学装置 |
| JP5098364B2 (ja) | 2007-03-02 | 2012-12-12 | セイコーエプソン株式会社 | 防塵ガラス及びそれを用いた電気光学装置 |
| US7999173B1 (en) | 2007-03-21 | 2011-08-16 | The United States Of America As Represented By The Administrator Of National Aeronautics And Space Administration | Dust removal from solar cells |
| US7958899B2 (en) * | 2007-08-21 | 2011-06-14 | Dainippon Screen Mfg. Co., Ltd. | Substrate cleaning apparatus and substrate cleaning method |
| US8854505B2 (en) | 2008-11-13 | 2014-10-07 | Nikon Corporation | Dust-removal optical device, a dust-removal imaging device, and method of manufacturing an optical device for removing dust |
| IN2012DN01781A (ja) * | 2009-08-28 | 2015-06-05 | Lonza Ag | |
| CN201579230U (zh) | 2009-10-23 | 2010-09-15 | 河北先河环保科技股份有限公司 | 水下光学测量分析仪的微型超声波清洗装置 |
| JP2011175107A (ja) | 2010-02-24 | 2011-09-08 | Sony Corp | 光学素子および光学機器 |
| CN102445458B (zh) | 2011-10-18 | 2013-07-31 | 中国科学院合肥物质科学研究院 | 一种光学透镜测污装置 |
| DE102012213136A1 (de) * | 2012-07-26 | 2014-01-30 | Siemens Aktiengesellschaft | Photovoltaikmodul und Verfahren zum Reinigen des Photovoltaikmoduls |
| KR20150115845A (ko) * | 2013-01-29 | 2015-10-14 | 캐논 가부시끼가이샤 | 압전 재료, 압전 소자, 적층 압전 소자, 액체 토출 헤드, 액체 토출 장치, 초음파 모터, 광학 장치, 진동 장치, 먼지 제거 장치, 촬상 장치 및 전자 기기 |
| US9083864B2 (en) | 2013-07-31 | 2015-07-14 | Ford Global Technologies, Llc | Self-cleaning camera lens |
| US9192278B2 (en) * | 2013-09-30 | 2015-11-24 | Elwha Llc | Self-cleaning substrate |
| DE102014200219A1 (de) * | 2014-01-09 | 2015-07-09 | Application Solutions (Electronics and Vision) Ltd. | Vorrichtung zur Reinigung eines optischen Elements eines Kamerasystems |
| KR101539050B1 (ko) | 2014-05-12 | 2015-07-23 | 울산대학교 산학협력단 | 강유전 고분자를 이용한 초음파 변환기 |
| JP2016010809A (ja) * | 2014-06-30 | 2016-01-21 | 株式会社ディスコ | レーザー加工装置 |
| CN204228198U (zh) | 2014-10-28 | 2015-03-25 | 南昌航空大学 | 基于聚偏氟乙烯压电薄膜的多物理量传感识别系统 |
| WO2016149046A1 (en) | 2015-03-16 | 2016-09-22 | Innovasonic, Inc. | Transparent ultrasonic transducer fabrication method and device |
| JP6763852B2 (ja) * | 2015-05-13 | 2020-09-30 | 株式会社エアレックス | パーティクル制御方法 |
| US9667191B2 (en) * | 2015-07-14 | 2017-05-30 | Texas Instruments Incorporated | Ultrasound lens cleaner driver with frequency selectable oscillator |
| CN105772380A (zh) | 2016-04-05 | 2016-07-20 | 湖南大学 | 一种pvdf超声换能器电极的制作方法及pvdf超声换能器 |
| US10527843B2 (en) * | 2017-05-12 | 2020-01-07 | International Business Machines Corporation | Ultra-sonic self-cleaning system |
-
2017
- 2017-05-12 US US15/593,605 patent/US10527843B2/en active Active
- 2017-11-08 US US15/806,698 patent/US10520723B2/en active Active
-
2018
- 2018-04-18 CN CN201880031272.4A patent/CN110612480B/zh active Active
- 2018-04-18 DE DE112018000917.3T patent/DE112018000917T5/de active Pending
- 2018-04-18 JP JP2019561134A patent/JP2020519433A/ja active Pending
- 2018-04-18 GB GB1917374.9A patent/GB2577416B/en active Active
- 2018-04-18 WO PCT/IB2018/052692 patent/WO2018207041A1/en active Application Filing
-
2019
- 2019-11-01 US US16/671,704 patent/US11073687B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0415146A (ja) * | 1990-05-08 | 1992-01-20 | Seiko Epson Corp | 窓払拭装置 |
| JPH04123756U (ja) * | 1991-04-19 | 1992-11-10 | 株式会社ゼクセル | ウインドガラスの霜除け装置 |
| JP2010226395A (ja) * | 2009-03-23 | 2010-10-07 | Canon Inc | 撮像装置、その制御方法及びプログラム |
| WO2012157407A1 (ja) * | 2011-05-13 | 2012-11-22 | 富士フイルム株式会社 | 撮像装置及び合焦制御方法 |
| JP2016527138A (ja) * | 2013-07-22 | 2016-09-08 | エコーヴィスタ ゲーエムベーハーEchovista Gmbh | 降水の超音波清掃 |
| JP2016064397A (ja) * | 2014-07-03 | 2016-04-28 | アスモ株式会社 | 液滴除去方法及び液滴除去装置 |
| WO2016085999A1 (en) * | 2014-11-26 | 2016-06-02 | Nec Laboratories America, Inc. | Open path optical sensing system having an ultrasonic cleaner and method |
| US20160266379A1 (en) * | 2015-03-11 | 2016-09-15 | Texas Instruments Incorporated | Ultrasonic lens cleaning system with current sensing |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022004060A1 (ja) * | 2020-07-03 | 2022-01-06 | 株式会社村田製作所 | 洗浄装置、洗浄装置を備える撮像ユニット、および制御方法 |
| JP7031803B1 (ja) * | 2020-07-03 | 2022-03-08 | 株式会社村田製作所 | 洗浄装置、洗浄装置を備える撮像ユニット、および制御方法 |
| CN114616059A (zh) * | 2020-07-03 | 2022-06-10 | 株式会社村田制作所 | 清洗装置、具备清洗装置的摄像单元以及控制方法 |
| CN114616059B (zh) * | 2020-07-03 | 2023-08-29 | 株式会社村田制作所 | 清洗装置、具备清洗装置的摄像单元以及控制方法 |
| US12115947B2 (en) | 2020-07-03 | 2024-10-15 | Murata Manufacturing Co., Ltd. | Cleaning device, imaging unit including cleaning device, and control method |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018207041A1 (en) | 2018-11-15 |
| CN110612480B (zh) | 2022-01-28 |
| US10520723B2 (en) | 2019-12-31 |
| GB201917374D0 (en) | 2020-01-15 |
| GB2577416A (en) | 2020-03-25 |
| CN110612480A (zh) | 2019-12-24 |
| US20180329205A1 (en) | 2018-11-15 |
| US20200064624A1 (en) | 2020-02-27 |
| GB2577416B (en) | 2022-03-09 |
| DE112018000917T5 (de) | 2019-11-14 |
| US20180329206A1 (en) | 2018-11-15 |
| US11073687B2 (en) | 2021-07-27 |
| US10527843B2 (en) | 2020-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11073687B2 (en) | Ultra-sonic self-cleaning system | |
| JP4759635B2 (ja) | 振動装置 | |
| WO2018198465A1 (ja) | 洗浄装置および洗浄装置を備える撮像ユニット | |
| JP4759636B2 (ja) | 振動装置 | |
| JP2020519433A5 (ja) | ||
| US9925570B2 (en) | Open path optical sensing system having an ultrasonic cleaner and method | |
| JP6819844B1 (ja) | 振動装置、および振動装置を備える撮像ユニット | |
| JP5725882B2 (ja) | 異物除去ユニットおよびそれを備える光学機器 | |
| JP2020181079A (ja) | 振動装置及び光学検出装置 | |
| JPWO2018198417A1 (ja) | 振動装置 | |
| KR20180025374A (ko) | 차량용 광학 장치 | |
| JP5889712B2 (ja) | 超音波センサ | |
| CN112703063B (zh) | 振动装置和光学检测装置 | |
| KR20080104058A (ko) | 광 검출 장치 및 방법 | |
| JP2021180411A (ja) | 撮像装置および撮像装置の制御方法 | |
| WO2023188515A1 (ja) | 振動装置を制御する制御装置及び振動装置を制御する方法 | |
| JPWO2023188515A5 (ja) | ||
| WO2020137262A1 (ja) | 振動装置及び光学検出装置 | |
| WO2023100399A1 (ja) | 光学モジュールおよび光学装置 | |
| JPH10192802A (ja) | 水中計測器用超音波洗浄装置 | |
| JP5482548B2 (ja) | 撮像装置 | |
| WO2024084728A1 (ja) | 光学装置、および光学装置を備える撮像ユニット | |
| JP2009284227A (ja) | 撮像装置、検査装置および検査方法 | |
| JP2016220757A (ja) | 液滴除去装置 | |
| JP2005347996A (ja) | 矩形波発振回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200526 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200909 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211005 |
|
| RD12 | Notification of acceptance of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7432 Effective date: 20211125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20211126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211217 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20220502 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220517 |
|
| RD14 | Notification of resignation of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7434 Effective date: 20220627 |