WO2023188515A1 - 振動装置を制御する制御装置及び振動装置を制御する方法 - Google Patents
振動装置を制御する制御装置及び振動装置を制御する方法 Download PDFInfo
- Publication number
- WO2023188515A1 WO2023188515A1 PCT/JP2022/042058 JP2022042058W WO2023188515A1 WO 2023188515 A1 WO2023188515 A1 WO 2023188515A1 JP 2022042058 W JP2022042058 W JP 2022042058W WO 2023188515 A1 WO2023188515 A1 WO 2023188515A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- clocks
- piezoelectric element
- impedance
- control device
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 62
- 230000008859 change Effects 0.000 abstract description 4
- 238000003384 imaging method Methods 0.000 description 22
- 238000004140 cleaning Methods 0.000 description 16
- 230000004048 modification Effects 0.000 description 13
- 238000012986 modification Methods 0.000 description 13
- 239000007788 liquid Substances 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 238000010408 sweeping Methods 0.000 description 2
- 239000010936 titanium Substances 0.000 description 2
- 229910000737 Duralumin Inorganic materials 0.000 description 1
- 229910013641 LiNbO 3 Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 229910002115 bismuth titanate Inorganic materials 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
Definitions
- the present disclosure relates to a control device for controlling a vibration device and a method for controlling the vibration device.
- Patent Document 1 discloses a piezoelectric motor drive circuit that controls and drives the piezoelectric element so that the alternating current flowing through the piezoelectric element remains approximately constant even if the resonant frequency characteristics of the piezoelectric element vary due to changes in ambient temperature, etc. .
- an object of the present disclosure is to provide a control device for controlling a vibration device and a method for controlling the vibration device, which can appropriately control the drive frequency for driving a piezoelectric element.
- a method includes: A method for controlling a vibration device including a piezoelectric element using a control device, the method comprising: changing the frequency of a drive signal that drives the piezoelectric element; Measuring a value related to impedance of the piezoelectric element; determining a driving frequency for driving the piezoelectric element based on the measured value regarding the impedance of the piezoelectric element; including;
- the step of changing the frequency of the drive signal includes changing the clock width so that the clock width of some clocks among the plurality of clocks included in the drive signal is different from the clock width of other clocks; has.
- a control device includes: A control device for controlling a vibration device including a piezoelectric element, a processor; a memory storing instructions to be executed by the processor; Equipped with The said instruction is changing the frequency of a drive signal for driving the piezoelectric element from the processor; Measuring a value related to impedance of the piezoelectric element; determining a driving frequency for driving the piezoelectric element based on the measured value regarding the impedance of the piezoelectric element; including;
- the step of changing the frequency of the drive signal includes changing the clock width so that the clock width of some clocks among the plurality of clocks included in the drive signal is different from the clock width of other clocks; has.
- vibration device control device and vibration device control method it is possible to appropriately control the drive frequency for driving the piezoelectric element.
- FIG. 1 is a perspective view for explaining the configuration of an imaging unit according to Embodiment 1.
- FIG. 1 is a schematic cross-sectional view showing a cross-sectional configuration of an imaging unit according to Embodiment 1.
- FIG. 1 is a schematic cross-sectional view showing a cross-sectional configuration of a vibrating device according to Embodiment 1.
- FIG. 2 is an exploded perspective view showing each component of the vibration device according to the first embodiment.
- FIG. 2 is a block diagram for explaining the configuration of a control device that controls the vibration device according to the first embodiment.
- FIG. 3 is an operation mode transition diagram for explaining the operation of the control device that controls the vibration device according to the first embodiment. 3 is a flowchart for explaining the operation of the control device that controls the vibration device according to the first embodiment.
- FIG. 7 is a flowchart for explaining the operation of the control device that controls the vibration device according to Modification 1 of Embodiment 1.
- FIG. 7 is a flowchart for explaining the operation of a control device that controls a vibration device according to a second modification of the first embodiment.
- 7 is a flowchart for explaining the operation of the control device that controls the vibration device according to the second embodiment.
- FIG. 10 An example of a plurality of clocks included in a drive signal whose clock widths have been changed in the method of controlling the vibration device by a control device according to the second embodiment is shown.
- 10 shows the relationship between the frequency of a drive signal and the resonant frequency in a graph showing the relationship between the resonant frequency and impedance of a piezoelectric element.
- 7 is a flowchart for explaining the operation of a control device that controls a vibration device according to Modification 1 of Embodiment 2.
- FIG. An example of a plurality of clocks included in a drive signal whose clock widths have been changed in a method of controlling a vibration device using a control device according to Modification 2 of Embodiment 2 is shown.
- An imaging unit is provided at the front or rear of a vehicle, and images captured by the imaging unit are used to control safety devices and perform automatic driving control. Since such an imaging unit is often installed outside the vehicle, foreign matter such as raindrops, mud, and dust may adhere to a transparent body such as a lens or protective glass that covers the outside. If foreign matter adheres to the transparent body, the foreign matter will be reflected in the image captured by the imaging unit, making it impossible to obtain a clear image.
- a vibration device that vibrates a transparent body to remove foreign substances.
- Such a vibration device uses a piezoelectric element to vibrate a transparent body, but the resonance frequency of the piezoelectric element is affected by various factors such as heat generated by the piezoelectric element and foreign matter attached to the transparent body. Varies depending on factors. Therefore, unless the driving frequency for driving the piezoelectric element is appropriately controlled, the transparent body cannot be efficiently vibrated.
- a control device that searches for the resonance frequency of the piezoelectric element.
- one possible method for improving the resonant frequency search performance is to increase the performance of the processor of the control device.
- increasing the performance of the processor in the control device causes problems such as increased manufacturing cost and increased mounting area of the processor.
- a method includes: A method for controlling a vibration device including a piezoelectric element using a control device, the method comprising: changing the frequency of a drive signal that drives the piezoelectric element; Measuring a value related to impedance of the piezoelectric element; determining a driving frequency for driving the piezoelectric element based on the measured value regarding the impedance of the piezoelectric element; including;
- the step of changing the frequency of the drive signal includes changing the clock width so that the clock width of some clocks among the plurality of clocks included in the drive signal is different from the clock width of other clocks; has.
- the drive frequency for driving the piezoelectric element can be appropriately controlled. Furthermore, manufacturing costs can be reduced.
- the several clocks may be located periodically in the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the several clocks may be located at equal intervals among the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the clock width of some of the clocks among the plurality of clocks may be changed to 0.5 times or more and less than 1 time, or more than 1 time and 1.5 times or less of the clock width of other clocks. good.
- the drive frequency of the piezoelectric element can be controlled more appropriately.
- the clock width may be changed to 0.1% or more and 99.9% or less of the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the impedance-related value is an impedance value
- the step of determining the driving frequency includes: determining whether the value related to the impedance is less than or equal to a predetermined threshold; determining the frequency of the drive signal as the drive frequency when it is determined that the value related to the impedance is less than or equal to a predetermined threshold; It may have.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the method includes, in the step of determining the driving frequency, further changing the clock width if the driving frequency cannot be determined based on the value related to the impedance measured after changing the clock width. But that's fine.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the step of changing the frequency of the drive signal includes changing the frequency while keeping the clock widths of the plurality of clocks constant;
- the step of measuring the impedance-related value includes measuring the impedance-related value while keeping the clock width constant and changing the frequency,
- the step of determining the driving frequency if the driving frequency cannot be determined based on the value related to the impedance measured while the clock width is kept constant and the frequency is changing, changing the clock width. may be executed.
- the drive frequency of the piezoelectric element can be controlled more appropriately.
- a control device includes: A control device for controlling a vibration device including a piezoelectric element, a processor; a memory storing instructions to be executed by the processor; Equipped with The said instruction is changing the frequency of a drive signal sent from the processor to the piezoelectric element; Measuring a value related to impedance of the piezoelectric element; determining a driving frequency for driving the piezoelectric element based on the measured value regarding the impedance of the piezoelectric element; including;
- the step of changing the frequency of the drive signal includes changing the clock width so that the clock width of some clocks among the plurality of clocks included in the drive signal is different from the clock width of other clocks; has.
- the drive frequency of the piezoelectric element can be appropriately controlled. Furthermore, manufacturing costs can be reduced.
- the several clocks may be positioned periodically among the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the several clocks may be located at equal intervals among the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the clock width of some of the clocks among the plurality of clocks is changed to 0.5 times or more and less than 1 time, or more than 1 time and 1.5 times or less of the clock width of other clocks. Good too.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the clock width may be changed to a clock width of 0.1% or more and 99.9% or less among the plurality of clocks.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the value related to impedance is an impedance value
- the step of determining the driving frequency includes: determining whether the value related to the impedance is less than or equal to a predetermined threshold; determining the frequency of the drive signal as the drive frequency when it is determined that the value related to the impedance is less than or equal to a predetermined threshold; It may have.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the instructions include, in the step of determining the driving frequency, if the driving frequency cannot be determined based on the impedance-related value measured after changing the clock width, further changing the clock width. But that's fine.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- the step of changing the frequency of the drive signal includes changing the frequency while keeping the clock widths of the plurality of clocks constant;
- the step of measuring the impedance-related value includes measuring the impedance-related value while keeping the clock width constant and changing the frequency, In the step of determining the resonant frequency, if the resonant frequency cannot be determined based on the value related to the impedance measured while the clock width is kept constant and the frequency is varied, changing the clock width. may be executed.
- the drive frequency of the piezoelectric element can be appropriately controlled.
- first, second, etc. are used for descriptive purposes only and are not to be understood as expressing or implying relative importance or ranking of technical features. Shouldn't. Features defined as “first” and “second” are expressly or implied to include one or more such features.
- FIG. 1 is a perspective view for explaining the configuration of an imaging unit according to the first embodiment.
- FIG. 2 is a schematic cross-sectional view showing the cross-sectional configuration of the imaging unit according to the first embodiment.
- FIG. 3 is a schematic cross-sectional view showing the cross-sectional configuration of the vibration device according to the first embodiment.
- FIG. 4 is an exploded perspective view showing each component of the vibration device according to the first embodiment.
- the imaging unit 100 includes a housing 1, a vibration device 10, and an imaging device 5.
- the housing 1 includes an imaging device 5.
- the housing 1 exposes a part of the vibration device 10.
- the material of the housing 1 is, for example, resin.
- the vibration device 10 includes a transparent body 2, a vibrating body 12 that vibrates the transparent body 2, and a retainer 13 that supports the transparent body 2 at its outer periphery. As shown in FIG. 1, in the vibrating device 10, a portion of the transparent body 2, the retainer 13, and the vibrating body 12 are exposed through a hole provided in the housing 1. The vibration device 10 vibrates the transparent body 2 to remove foreign matter attached to the transparent body 2 .
- the transparent body 2 is placed in front of the imaging device 5.
- the vibration device 10 removes foreign matter attached to the transparent body 2.
- the light-transmitting body 2 has a light-transmitting property that allows energy rays or light having a wavelength detected by the imaging device 5 to pass therethrough.
- the light-transmitting body 2 may be a lens having light-condensing properties.
- the vibrating body 12 vibrates the transparent body 2 to remove attached foreign matter.
- the vibrating body 12 has a cylindrical shape.
- the vibrating body 12 is provided with, for example, a hollow circular piezoelectric element 14 on a surface opposite to the surface in contact with the transparent body 2, that is, an annular piezoelectric element 14.
- a wiring 15 having a hollow circular, ie, ring-shaped electrode is provided on the opposite surface of the surface that is in contact with the vibrating body 12.
- the position of the piezoelectric element 14 provided on the vibrating body 12 is not limited to the position shown in FIG. 3.
- the retainer 13 is connected to the vibrating body 12.
- the retainer 13 and the vibrating body 12 are each threaded, and the retainer 13 and the vibrating body 12 are connected by fitting the respective threaded parts.
- the material of the retainer 13 may be, for example, not only metal such as stainless steel, aluminum, iron, titanium, and duralumin, but also plastic.
- the vibrating device 10 may further include a configuration for discharging a cleaning liquid (cleaning body) onto the transparent body 2 to remove attached foreign matter.
- a cleaning nozzle 3 shown in FIG. 1 that discharges a cleaning liquid onto the transparent body 2 discharges the cleaning liquid onto the transparent body 2 to remove attached foreign matter.
- the imaging device 5 images an object to be imaged outside the vibration device 10 through the transparent body 2 of the vibration device 10.
- the imaging device 5 includes, for example, an optical element, an image sensor, a sensor component, and the like.
- FIG. 5 is a block diagram for explaining the configuration of a control device that controls the vibration device according to the first embodiment.
- the control device 50 includes a processor 20, a piezoelectric drive section 30, an impedance detection section 70, and a power supply circuit 80.
- the processor 20 is a control unit that processes the imaging signal from the imaging device 5 and supplies a control signal to the piezoelectric drive unit 30.
- the processor 20 includes a CPU (Central Processing Unit) as a control center, a ROM (Read Only Memory) that stores programs and control data for the CPU to operate, and a RAM (Random Access Memory) that functions as a work area for the CPU. y ), input/output interfaces, etc. are provided to maintain signal integrity with peripheral devices.
- the processor 20 also includes a microcomputer, an MPU (Micro-Processing Unit), a GPU (Graphics Processing Unit), a DSP (Digital Signal Processor), and an FPGA (Field Pr. grammable Gate Array) or ASIC (Application Specific Integrated Circuit).
- MPU Micro-Processing Unit
- GPU Graphics Processing Unit
- DSP Digital Signal Processor
- FPGA Field Pr. grammable Gate Array
- ASIC Application Specific Integrated Circuit
- the piezoelectric drive unit 30 generates a drive signal according to the drive voltage and frequency for driving the piezoelectric element 14 based on the control signal from the processor 20.
- the piezoelectric element 14 is applied with a drive signal generated by the piezoelectric drive unit 30 and vibrates.
- the vibration of the piezoelectric element 14 causes the vibrating body 12 and the transparent body 2 to vibrate, thereby removing foreign matter.
- Examples of materials forming the piezoelectric element 14 include barium titanate (BaTiO 3 ), lead zirconate titanate (PZT: PbTiO 3 ⁇ PbZrO 3 ), lead titanate (PbTiO 3 ), and lead metaniobate (PbNb 2 ) .
- piezoelectric ceramics such as O 6 ), bismuth titanate (Bi 4 Ti 3 O 12 ), and (K,Na)NbO 3 , or appropriate piezoelectric single crystals such as LiTaO 3 and LiNbO 3 can be used.
- the impedance detection unit 70 monitors the value related to the impedance of the piezoelectric drive unit 30 when the piezoelectric element 14 is vibrated.
- the value related to impedance is, for example, current, impedance, etc.
- the power supply circuit 80 outputs an alternating current signal.
- the effective voltage of the power supply circuit 80 is, for example, 0V or more and 70V or less.
- the piezoelectric drive section 30 and the impedance detection section 70 can be realized by, for example, an electronic circuit.
- the functions of the piezoelectric drive section 30 and the impedance detection section 70 may be configured only by hardware, or may be realized by a combination of hardware and software.
- the piezoelectric drive unit 30 and the impedance detection unit 70 may realize predetermined functions by reading data and programs stored in a storage unit such as a memory and performing various calculation processes.
- FIG. 6 is an operation mode transition diagram for explaining the operation of the control device that controls the vibration device according to the first embodiment.
- FIG. 7 is a flowchart for explaining the operation of the control device that controls the vibration device according to the first embodiment.
- the control device 50 drives the piezoelectric element 14 in a search mode and a drive mode.
- the piezoelectric element 14 is vibrated in order to determine the resonance frequency fc of the piezoelectric element 14.
- the piezoelectric element 14 is vibrated to remove foreign matter attached to the surface of the transparent body 2 by vibrating the vibrating body 12 at the resonance frequency fc determined in the search mode.
- Search mode and drive mode are performed alternately. The detailed steps of the search mode will be explained below.
- the search mode in the first embodiment includes a first search step and a second search step.
- the resonance frequency fc of the piezoelectric element 14 is searched for by sweeping the frequency fr of the drive signal between fmin and fmax. Sweeping means changing the frequency fr in stages as time passes. For example, the frequency fr may be increased by ⁇ f every time ⁇ t passes.
- fmin is the minimum value of the frequency fr of the drive signal
- fmax is the maximum value of the frequency fr of the drive signal.
- the second search step is performed when the resonant frequency fc cannot be found in the first search step.
- the resonance frequency fc is searched for by changing the drive voltage Vpp applied to the piezoelectric element 14.
- the control device 50 sets the drive voltage Vpp of the drive signal that drives the piezoelectric element 14 to the voltage V1 (step S1), and sets the number of updates Nv of the drive voltage Vpp to 1 (step S2).
- the drive voltage Vpp is, for example, an alternating current voltage.
- the effective voltage of the voltage V1 is, for example, 0V or more and 70V or less.
- the control device 50 sets the frequency fr of the drive signal to the frequency fmin (step S3).
- the frequency fmin is, for example, 20 kHz or more and 1 MHz or less.
- control device 50 applies the drive signal having the drive voltage Vpp set in step S1 and the frequency fr set in step S3 to the piezoelectric element 14 (step S4).
- control device 50 measures the impedance value Z of the piezoelectric element 14 at the frequency fr of the drive signal (step S5).
- control device 50 determines whether the measured impedance value Z is less than or equal to a predetermined threshold value Zth (step S6).
- the threshold value Zth is, for example, greater than 0 ⁇ and less than or equal to 1 k ⁇ .
- FIG. 8 shows the relationship between the resonance frequency fc of the piezoelectric element 14 and the impedance Z when the drive voltage Vpp is constant.
- the horizontal axis represents frequency [kHz]
- the vertical axis represents impedance [ ⁇ ].
- the frequency where the impedance rapidly changes is the resonant frequency fc of the piezoelectric element 14.
- the measured impedance value Z of the piezoelectric element 14 is equal to or lower than the threshold value Zth.
- the control device 50 determines the frequency fr of the drive signal as the resonance frequency fc of the piezoelectric element 14 (step S7).
- the control device 50 operates in a drive mode in which the piezoelectric element 14 is vibrated at the resonance frequency fc to remove foreign matter attached to the transparent body 2 (step S8). Specifically, the control device 50 determines the resonance frequency fc of the piezoelectric element 14 as the driving frequency, and drives the piezoelectric element 14 at the determined driving frequency. In the drive mode, in conjunction with the vibration of the piezoelectric element 14, cleaning liquid may be ejected from the cleaning nozzle 3 shown in FIG. 1 to remove foreign matter attached to the transparent body 2.
- step S6 If it is determined in step S6 that the measured impedance value Z is not equal to or less than the threshold value Zth, the control device 50 updates the frequency fr of the drive signal to fr+ ⁇ f (step S9).
- ⁇ f is, for example, 1 Hz or more and 1 kHz or less.
- control device 50 determines whether the frequency fr of the drive signal exceeds the frequency fmax (step S10).
- the frequency fmax is, for example, 1 MHz or less.
- step S10 If it is determined in step S10 that the frequency fr of the drive signal does not exceed the frequency fmax, the process returns to step S4.
- steps S1 to S10 are the first search steps. If it is determined in step S10 that the frequency fr of the drive signal exceeds the frequency fmax, the following second search step is performed.
- step S10 If it is determined in step S10 that the frequency fr of the drive signal exceeds the frequency fmax, the control device 50 changes the voltage waveform of the drive voltage Vpp.
- the voltage waveform of the drive signal applied to the piezoelectric element 14 changes.
- the effective voltage of the voltage waveform changes.
- the amplitude of the voltage waveform changes.
- the amplitude of the voltage waveform increases.
- the amplitude of the voltage waveform decreases.
- the drive voltage Vpp is updated to Vpp+ ⁇ V (step S11).
- ⁇ V may be a positive value or a negative value. That is, the amplitude of the voltage waveform applied to the piezoelectric element 14 increases or decreases.
- the absolute value of ⁇ V is, for example, greater than 0V and less than or equal to 70V.
- control device 50 updates the number of updates Nv of the drive voltage Vpp to Nv+1 (step S12).
- control device 50 determines whether the number of updates Nv updated in step S12 exceeds the maximum number of updates Nvmax (step S13).
- the maximum number of updates Nvmax may be a predetermined number of times. Nvmax is, for example, 1 to 10 times.
- step S13 If it is determined in step S13 that the number of updates Nv exceeds Nvmax, the control device 50 detects an error (ERROR) (step S14) and ends the operation in the search mode (step S15).
- ERPOR error
- step S13 If it is determined in step S13 that the number of updates Nv does not exceed Nvmax, the process returns to step S3.
- FIG. 9A shows an example of a change in the resonant frequency fc of the piezoelectric element 14 when the effective voltage is changed in steps of 10 from 10V to 50V.
- the resonance frequency fc of the piezoelectric element 14 decreases as the effective voltage increases.
- the horizontal axis represents frequency [kHz]
- the vertical axis represents impedance [ ⁇ ].
- the graph shown in FIG. 9B shows how the resonance frequency changes when the effective voltage is changed from Vpp1 to Vpp3.
- the frequency f1 in FIG. 9B is an example of the frequency fr of the drive signal where fmin ⁇ f1 ⁇ fmax. From the graph of FIG. 9B, when the effective voltages are Vpp1 and Vpp2, the impedance value Z is larger than the threshold value Zth with the drive signal of frequency f1 or frequency f1+ ⁇ f, and the resonant frequency fc cannot be searched.
- the effective voltage is Vpp3
- a frequency at which the impedance value Z becomes equal to or less than the threshold value Zth can be searched for using the drive signal of the frequency f1. That is, by changing the drive voltage Vpp by Vpp + ⁇ V in step S11 and further performing the steps after step S3, the resonance frequency fc of the piezoelectric element 14 is made to match the frequency fr of the drive signal, or is made to match the frequency fr of the drive signal. You can get close.
- the search performance for the resonant frequency fc of the piezoelectric element 14 can be improved. Further, the above control method can improve the resonant frequency search performance without changing the performance of the processor 20, and can reduce manufacturing costs.
- FIG. 10 is a flowchart for explaining the operation of the control device that controls the vibration device according to this modification.
- control device 50 sets the frequency fr of the drive signal to f0 (step S101).
- f0 is, for example, an arbitrary resonance frequency searched in the preceding search mode.
- control device 50 sets the drive voltage Vpp to V1 (step S102), and sets the number of updates Nv of the drive voltage Vpp to 1 (step S103).
- control device 50 applies a drive signal having the frequency fr set in step S101 and the drive voltage Vpp set in step S102 to the piezoelectric element 14 (step S104).
- control device 50 measures the impedance value Z of the piezoelectric element 14 at the frequency fr of the drive signal (step S105).
- control device 50 determines whether the measured impedance value is less than or equal to a predetermined threshold Zth (step S106).
- control device 50 determines the frequency fr of the drive signal as the resonance frequency fc of the piezoelectric element 14 (step S107).
- the control device 50 operates in a drive mode that vibrates the piezoelectric element 14 at the resonance frequency fc to remove foreign matter attached to the transparent body 2 (step S108). Specifically, the control device 50 determines the resonance frequency fc of the piezoelectric element 14 as the driving frequency, and drives the piezoelectric element 14 at the determined driving frequency. In the drive mode, in conjunction with the vibration of the piezoelectric element 14, cleaning liquid may be ejected from the cleaning nozzle 3 shown in FIG. 1 to remove foreign matter attached to the transparent body 2.
- step S106 If it is determined in step S106 that the impedance value Z exceeds the predetermined threshold Zth, the control device 50 updates the drive voltage Vpp to Vpp+ ⁇ V (step S109).
- control device 50 updates the number of updates Nv of the drive voltage Vpp to Nv+1 (step S110).
- control device 50 determines whether the number of updates Nv updated in step S110 exceeds the maximum number of updates Nvmax (step S111).
- step S111 If it is determined in step S111 that the number of updates Nv exceeds Nvmax, the control device 50 detects an error (ERROR) (step S112) and ends the operation in the search mode (step S113).
- ERPOR error
- step S111 If it is determined in step S111 that the number of updates Nv does not exceed Nvmax, the process returns to step S104.
- the above control method can improve the search performance for the resonant frequency fc of the piezoelectric element 14. Further, the above control method can simplify the control steps and shorten the frequency search time.
- control device 50 detects the impedance value Z of the piezoelectric element 14, but the control device 50 may detect the current value I of the piezoelectric element 14.
- the current value is the reciprocal of impedance
- the control device 50 detects the current value I of the piezoelectric element 14
- the current value I is measured in step S5 of the above control method, and the current value I is determined to be a predetermined value in step S6. It is determined whether or not it is larger than a threshold value Ith.
- FIG. 11 shows a flowchart for explaining the operation of the control device that controls the vibration device according to this modification.
- steps S1 to S4 of the first embodiment shown in FIG. 7 are performed.
- control device 50 measures the current value I of the piezoelectric element 14 (step S5A).
- control device 50 determines whether the current value I measured in step S5A is larger than a predetermined threshold value Ith (step S6A).
- step S6A if it is determined that the current value I is larger than the predetermined threshold value Ith, step S7 and step S8 of the first embodiment shown in FIG. 7 are performed.
- step S6A If it is determined in step S6A that the current value I is not larger than the predetermined threshold value Ith, step S9 and step S15 of the first embodiment shown in FIG. 7 are performed.
- the drive frequency for driving the piezoelectric element 14 can be appropriately controlled. Specifically, since the search performance for the resonance frequency of the piezoelectric element 14 can be improved, the drive frequency can be determined appropriately. Further, in the above control method, the measurement value for determining the resonance frequency fc of the piezoelectric element 14 is the current value I of the piezoelectric element 14, and therefore measurement is easy.
- Embodiment 2 differs from Embodiment 1 in the method of searching for the resonance number frequency in search mode.
- the search mode in the second embodiment includes a first search step and a third search step.
- the first search step differs from the first embodiment in that the frequency fr of the drive signal is swept between fmin and fmax to search for the resonance frequency fc of the piezoelectric element 14.
- the third search step is performed when the resonance frequency fc of the piezoelectric element 14 cannot be found in the first search step.
- the third search step searches for the resonant frequency fc of the piezoelectric element 14 by changing the clock widths of some clocks among the plurality of clocks included in the drive signal.
- the clock width may be changed by changing the duty ratio.
- FIG. 12 is a flowchart for explaining the operation of the control device that controls the vibration device according to the second embodiment. With reference to FIG. 12, a method of controlling the vibration device according to the second embodiment will be described.
- control device 50 sets the drive voltage Vpp to Vdr (step S201).
- the effective voltage of the voltage Vdr is, for example, 0V or more and 70V or less.
- the control device 50 sets the clock width a of the plurality of clocks included in the drive signal to amin (step S202), and sets the number of updates Nc of the clock width a to 1 (step S203).
- amin is the minimum value of the clock width a, and is, for example, a preset value. amin is, for example, 1 usec (1 MHz) or more and 50 usec (20 kHz) or less.
- fr the frequency fr of the drive signal depends on the clock width
- control device 50 applies a drive signal having the drive voltage Vpp set in step S201 and the frequency fr set in step S202 to the piezoelectric element 14 (step S204).
- control device 50 measures the impedance value Z of the piezoelectric element 14 at the frequency fr of the drive signal (step S205).
- the control device 50 determines whether the measured impedance value Z is less than or equal to a predetermined threshold value Zth (step S206).
- control device 50 determines the frequency fr of the drive signal as the resonance frequency fc of the piezoelectric element 14 (step S207).
- step S207 the control device 50 operates in a drive mode in which the piezoelectric element 14 is vibrated at the resonance frequency fc determined in step S207 to remove foreign matter attached to the transparent body 2 (step S208).
- the drive mode in conjunction with the vibration of the piezoelectric element 14, cleaning liquid may be ejected from the cleaning nozzle 3 shown in FIG. 1 to remove foreign matter attached to the transparent body 2.
- ⁇ a is, for example, 1 Hz or more and 1 kHz or less.
- control device 50 updates the number of updates Nc of the clock width a to Nc+1 (step S210).
- control device 50 determines whether the number of updates Nc updated in step S210 exceeds a predetermined threshold Ncth1 (step S211).
- Ncth1 is, for example, 1 or more times and 10 times or less.
- step S211 If it is determined in step S211 that the number of updates Nc does not exceed Ncth1, the process returns to step S203.
- steps S201 to S211 are the first search steps in this embodiment, and when it is determined in step S211 that the number of updates Nc exceeds Ncth1, the frequency fr of the drive signal has reached fmax. . Therefore, in the first search step, the frequency fr of the drive signal is swept from fmin to fmax. That is, in the first search step, the clock width changes from amin to amax. If it is determined in step S211 that the number of updates Nc exceeds Ncth1, the following third search step is performed.
- step S211 If it is determined in step S211 that the number of updates Nc exceeds Ncth1, the control device 50 changes the clock widths so that the clock widths of some clocks among the plurality of clocks are different from the clock widths of other clocks.
- Step S212 some clocks are referred to as a plurality of first clocks, and the remaining clocks are referred to as a plurality of second clocks, and the clock width of the plurality of first clocks is maintained at amax, and the clock width of the plurality of second clocks is maintained at amax. Change to a1.
- the clock width a1 is, for example, a value less than 1 time the clock width amax, preferably a value of 0.5 times or more and less than 1 time, and more preferably a value of 0.99 times or more and less than 1 time. That is, the control device 50 sets the clock width of some clocks among the plurality of clocks to a value less than 1 times the clock width of other clocks, preferably to a value 0.5 times or more and less than 1 time, and further Preferably, the value is changed to 0.99 times or more and less than 1 times. Further, the width a1 is, for example, amax ⁇ a, and ⁇ a is, for example, the same as ⁇ a in step S209.
- the width of the plurality of second clocks among the plurality of clocks is less than one time the width of the plurality of first clocks, but the invention is not limited to this.
- the clock width may be greater than one time the plurality of first clock widths.
- the plurality of second clock widths are greater than one time and less than or equal to 1.5 times the plurality of first clock widths, preferably greater than one time and less than or equal to 1.01 times.
- step S212 the control device 50 changes the clock width of 0.1% or more and 99.9% or less of the plurality of clocks included in the drive signal, for example.
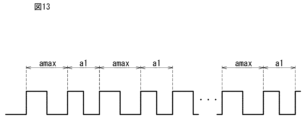
- FIG. 13 shows an example of a plurality of clocks included in a drive signal, the clock width of which has been changed. As shown in FIG. 13, the control device 50 changes the clock width of 1/2 (50%) of the clocks included in the drive signal to the width amax, and changes the clock width of the remaining 1/2 (50%) The clock width of the clock is changed to width a1.
- step S212 the control device 50 periodically changes the clock widths of the plurality of clocks, for example.
- some clocks are located periodically in multiple clocks.
- some clocks are equally spaced among multiple clocks.
- the control device 50 periodically changes the clock widths of the plurality of clocks so that among the plurality of clocks included in the drive signal, a clock with a width amax and a clock with a width a1 are alternately included. .
- control device 50 updates the number of updates Nc of the clock width a to Nc+1 (step S213).
- control device 50 measures the impedance value Z of the piezoelectric element 14 at the frequency fr(a(amax, a1)) of the drive signal (step S214).
- control device 50 determines whether the impedance value Z measured in step S214 is less than or equal to a predetermined threshold value Zth (step S215).
- control device 50 determines the frequency fr of the drive signal as the resonance frequency fc of the piezoelectric element 14 (step S216).
- the control device 50 operates in a drive mode in which the piezoelectric element 14 is vibrated at the resonance frequency fc determined in step S216 to remove foreign matter attached to the transparent body 2 (step S217). Specifically, the control device 50 determines the resonance frequency fc of the piezoelectric element 14 as the driving frequency, and drives the piezoelectric element 14 at the determined driving frequency. In the drive mode, in conjunction with the vibration of the piezoelectric element 14, cleaning liquid may be ejected from the cleaning nozzle 3 shown in FIG. 1 to remove foreign matter attached to the transparent body 2.
- step S215 If it is determined in step S215 that the measured impedance value Z is not equal to or less than the threshold value Zth, the control device 50 updates the clock width to a ⁇ a of the plurality of clocks included in the drive signal (step S218). As a result, the frequency fr of the drive signal is updated to fr(a ⁇ a). Updating to clock width a ⁇ a means, for example, decreasing both clock width amax and clock width a1 by ⁇ a. ⁇ a is, for example, the same as ⁇ a in step S209.
- control device 50 updates the number of updates Nc of the clock width a to Nc+1 (step S219).
- control device 50 determines whether the number of updates Nc updated in step S219 exceeds the threshold value Ncth2 (step S220).
- Ncth2 is, for example, 1 or more times and 10 times or less.
- step S220 If it is determined in step S220 that the number of updates Nc does not exceed Ncth2, the process returns to step S214.
- step S220 If it is determined in step S220 that the number of updates Nc exceeds Ncth2, the control device 50 detects an error (ERROR) and ends the operation in the search mode (step S221).
- ERPOR error
- the frequency fr of the drive signal becomes a frequency fr that depends on the two or more clock widths.
- the frequency fr of the drive signal is expressed by the following equation 1.
- the drive signal The frequency fr is expressed by the following equation 2.
- FIG. 14 shows the relationship between the frequency of the drive signal and the resonance frequency in a graph showing the relationship between the resonance frequency and impedance of the piezoelectric element.
- the horizontal axis represents frequency [kHz] and the vertical axis represents impedance [ ⁇ ].
- the resonance frequency fc of the piezoelectric element 14 exists between f(amax) and f(amax ⁇ a).
- the frequency fr of the drive signal is f(amax) or f(amax ⁇ a)
- the measured impedance Z is larger than the threshold value Zth. Therefore, it cannot be searched in the first search step.
- Equation 2 by performing the third search step, the frequency fr(a(amax, amax- ⁇ a)) with a value between fr(amax) and fr(amax- ⁇ a) can be found.
- a driving signal having the following characteristics can be emitted. Thereby, it is possible to search for the resonance frequency fc existing between fr(amax) and fr(amax- ⁇ a), which could not be searched in the first search step.
- the frequency resolution can be improved regardless of the performance of the processor 20.
- the drive frequency of the piezoelectric element 14 can be appropriately controlled.
- the search performance for the resonance frequency fc of the piezoelectric element 14 can be further improved, the driving frequency of the piezoelectric element 14 can be determined appropriately.
- an increase in manufacturing costs can be suppressed.
- FIG. 15 is a flowchart for explaining the operation of the control device that controls the vibration device according to this modification.
- control device 50 sets the drive voltage Vpp to Vdr (step S301).
- the control device 50 sets clock widths such that the clock widths of some of the plurality of clocks are different from the clock widths of other clocks (step S302).
- the clock width of 50% of the clocks included in the drive signal is set to the width amax
- the clock width of the remaining 50% of the clocks is set to the width a1.
- the width a1 is, for example, amax ⁇ a
- ⁇ a is, for example, the same as ⁇ a in step S209 of the second embodiment.
- the frequency fr of the drive signal is set to fr(a(amax, a1)).
- step S302 the method in which the control device 50 makes the clock widths of some clocks different from the clock widths of other clocks among the plurality of clocks is the method of changing the clock width in step S212 of the second embodiment. A similar method can be adopted.
- control device 50 sets the number of updates Nc of the clock width a to 1 (step S303).
- control device 50 applies a drive signal having the drive voltage Vpp set in step S301 and the frequency fr(a(amax, a1)) set in step S302 to the piezoelectric element 14 (step S304).
- control device 50 measures the impedance value Z of the piezoelectric element 14 at the frequency fr(a(amax, a1)) of the drive signal (step S305).
- control device 50 determines whether the impedance value Z measured in step S305 is less than or equal to a predetermined threshold value Zth (step S306).
- the control device 50 determines the frequency fr of the drive signal to be the resonance frequency fc of the piezoelectric element 14 (step S307).
- the control device 50 operates in a drive mode in which the piezoelectric element 14 is vibrated at the resonance frequency fc determined in step S407 to remove foreign matter attached to the transparent body 2 (step S308).
- the cleaning liquid may be ejected from the cleaning nozzle 3 in conjunction with the vibration of the piezoelectric element 14 to remove foreign matter attached to the transparent body 2 .
- step S306 If it is determined in step S306 that the measured impedance value Z is not equal to or less than the threshold value Zth, the control device 50 updates the clock width a ⁇ a of the plurality of clocks included in the drive signal (step S309). As a result, the frequency fr of the drive signal is updated to fr(a ⁇ a). Updating to clock width a ⁇ a means, for example, decreasing both clock width amax and clock width a1 by ⁇ a. ⁇ a is, for example, the same as ⁇ a in step S209 of the second embodiment.
- control device 50 updates the number of updates Nc of the clock width a to Nc+1 (step S310).
- control device 50 determines whether the number of updates Nc updated in step S410 exceeds zNcmax (step S311).
- the maximum number of updates Ncmax may be a preset number of updates. Ncmax is, for example, 1 or more times and 10 times or less.
- step S311 If it is determined in step S311 that the number of updates Nc does not exceed Ncmax, the process returns to step S305.
- step S311 If it is determined in step S311 that the number of updates Nc exceeds Ncmax, the control device 50 detects an error (ERROR) (step S312) and ends the operation in the search mode (step S313).
- ERPOR error
- the above control method can improve the search performance for the resonant frequency fc of the piezoelectric element 14. Moreover, the above control method can simplify control and shorten frequency search time.
- step S212 the control device 50 maintains the clock width of 1/2 (50%) of the plurality of clocks included in the drive signal at the width amax, and maintains the clock width of the remaining 1/2 (50%) clocks at the width amax.
- the clock width of the /2 (50%) clock is changed to width a1.
- the method by which the processor 20 changes the clock widths such that the clock widths of some of the plurality of clocks are different from the clock widths of the other clocks is not limited to this.
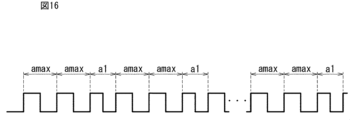
- the control device 50 maintains the clock width of 2/3 of the clocks included in the drive signal at the width amax, and maintains the clock width of the remaining 1/3 of the clocks at the width amax. It may be changed to a1.
- a clock having a clock width a1 is issued, for example, once every three times.
- the frequency fr of the drive signal is expressed by the following equation 3.
- a drive signal that includes clocks with a width amax at a ratio of 2/3 and clocks with a clock width a1 at a ratio of 1/3, and a drive signal that includes clocks with a width amax and clocks with a width a1 at the same ratio.
- a drive signal having a frequency fr different from that of the drive signal can be generated.
- control device 50 determines the resonant frequency of the piezoelectric element 14 and uses the determined resonant frequency as the drive frequency for driving the piezoelectric element 14, but the control device 50 is not limited to this.
- the control device 50 may determine the drive frequency based on a change in the value related to the impedance of the piezoelectric element 14 without determining the resonance frequency of the piezoelectric element 14.
- the control method for controlling a vibration device and the control device for a vibration device according to the present disclosure can be applied to a vibration device used in a vehicle-mounted camera used outdoors, a surveillance camera, or a light sensor such as LiDAR.
- Housing 2 Transparent body 3 Cleaning nozzle 5 Imaging device 10 Vibrating device 12 Vibrating body 13 Retainer 14 Piezoelectric element 15 Wiring 20 Processor 30 Piezoelectric drive section 50 Control device 70 Impedance detection section 80 Power supply circuit 100 Imaging unit
Landscapes
- Apparatuses For Generation Of Mechanical Vibrations (AREA)
Abstract
本開示の方法は、圧電素子を備えた振動装置を制御装置によって制御する方法であって、前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、前記圧電素子のインピーダンスに関する値を測定するステップと、測定された前記圧電素子の前記インピーダンスに関する値の変化に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、を含み、前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、を有する。
Description
本開示は、振動装置を制御する制御装置及び振動装置を制御する方法に関する。
振動装置等に設けられた圧電素子の共振周波数は、様々な要因によって変化する。特許文献1には、周囲温度等の変動によって、圧電素子の共振周波数特性が変動したとしても、圧電素子に流れる交流電流が略一定になるように制御駆動する圧電モーター駆動回路が開示されている。
近年、圧電素子を備える振動装置において、圧電素子を駆動する駆動周波数を適切に制御することが求められている。
そこで、本開示は、圧電素子を駆動する駆動周波数を適切に制御することができる振動装置を制御する制御装置及び振動装置を制御する方法を提供することを目的とする。
本開示に係る一態様の方法は、
圧電素子を備えた振動装置を制御装置によって制御する方法であって、
前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
圧電素子を備えた振動装置を制御装置によって制御する方法であって、
前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
本開示に係る一態様の制御装置は、
圧電素子を備える振動装置を制御する制御装置であって、
プロセッサと、
前記プロセッサにより実行される命令を記憶したメモリと、
を備え、
前記命令は、
前記プロセッサから前記圧電素子を駆動させる駆動信号の周波数を変化させるステップと、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
圧電素子を備える振動装置を制御する制御装置であって、
プロセッサと、
前記プロセッサにより実行される命令を記憶したメモリと、
を備え、
前記命令は、
前記プロセッサから前記圧電素子を駆動させる駆動信号の周波数を変化させるステップと、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
本開示に係る振動装置の制御装置及び振動装置の制御方法によれば、圧電素子を駆動する駆動周波数を適切に制御することができる。
(本開示に至った経緯)
車両の前部や後部に撮像ユニットを設けて、当該撮像ユニットで撮像した画像を利用して安全装置を制御したり、自動運転制御を行ったりしている。このような撮像ユニットは、車外に設けられることが多いため、外部を覆うレンズや保護ガラスなどの透光体に雨滴、泥、塵埃等の異物が付着することがある。透光体に異物が付着すると、当該撮像ユニットで撮像した画像に付着した異物が映り込み、鮮明な画像が得られなくなる。
車両の前部や後部に撮像ユニットを設けて、当該撮像ユニットで撮像した画像を利用して安全装置を制御したり、自動運転制御を行ったりしている。このような撮像ユニットは、車外に設けられることが多いため、外部を覆うレンズや保護ガラスなどの透光体に雨滴、泥、塵埃等の異物が付着することがある。透光体に異物が付着すると、当該撮像ユニットで撮像した画像に付着した異物が映り込み、鮮明な画像が得られなくなる。
そこで、透光体を振動させて異物を除去する振動装置が開発されている。このような振動装置は、例えば、圧電素子を利用して透光体を振動させているが、圧電素子の共振周波数は、圧電素子が発する熱や、透光体に付着した異物等、様々な要因によって変化する。このため、圧電素子を駆動する駆動周波数を適切に制御しないと、透光体を効率良く振動させることができない。
例えば、圧電素子を駆動する駆動周波数を制御するために、圧電素子の共振周波数を探索する制御装置が開発されている。圧電素子の共振周波数の探索性能が高くなるほど、圧電素子の駆動周波数を適切に制御することができる。例えば、共振周波数の探索性能を向上させる方法の1つとして、制御装置のプロセッサの性能を高くする方法が考えられる。しかしながら、制御装置のプロセッサの性能を高くすると、製造コストが高くなることや、プロセッサの実装面積が大きくなるという問題がある。
そこで、本発明者は、これらの課題を解決するために鋭意検討し、本開示に至った。
本開示に係る一態様の方法は、
圧電素子を備えた振動装置を制御装置によって制御する方法であって、
前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
圧電素子を備えた振動装置を制御装置によって制御する方法であって、
前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
このような構成により、圧電素子を駆動する駆動周波数を適切に制御することができる。また、製造コストを抑えることができる。
前記方法において、前記いくつかのクロックは、前記複数のクロックにおいて周期的に位置してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記方法において、前記いくつかのクロックは、前記複数のクロックにおいて等間隔に位置してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記方法において、前記複数のクロックのうち、前記いくつかのクロックのクロック幅を他のクロックのクロック幅の0.5倍以上1倍未満又は1倍より大きく1.5倍以下に変更してもよい。
このような構成により、圧電素子の駆動周波数をより適切に制御することができる。
前記方法において、前記複数のクロックのうち、0.1%以上99.9%以下のクロックのクロック幅に変更してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記方法において、前記インピーダンスに関する値は、インピーダンス値であり、
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有してもよい。
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記方法は、前記駆動周波数を決定するステップにおいて、前記クロック幅を変更した後に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅をさらに変更するステップ、を含んでもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記方法において、前記駆動信号の周波数を変化させるステップは、前記複数のクロックのクロック幅を一定にして前記周波数を変化させること、を有し、
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記駆動周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅を変更することが実行されてもよい。
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記駆動周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅を変更することが実行されてもよい。
このような構成により、圧電素子の駆動周波数をより適切に制御することができる。
本開示に係る一態様の制御装置は、
圧電素子を備える振動装置を制御する制御装置であって、
プロセッサと、
前記プロセッサにより実行される命令を記憶したメモリと、
を備え、
前記命令は、
前記プロセッサから前記圧電素子に送信される駆動信号の周波数を変化させるステップと、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
圧電素子を備える振動装置を制御する制御装置であって、
プロセッサと、
前記プロセッサにより実行される命令を記憶したメモリと、
を備え、
前記命令は、
前記プロセッサから前記圧電素子に送信される駆動信号の周波数を変化させるステップと、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。また、製造コストを抑えることができる。
前記制御装置において、前記いくつかのクロックは、前記複数のクロックにおいて周期的に位置してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記制御装置において、前記いくつかのクロックは、前記複数のクロックにおいて等間隔に位置してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記制御装置において、前記複数のクロックのうち、前記いくつかのクロックのクロック幅を他のクロックのクロック幅の0.5倍以上1倍未満又は1倍より大きく1.5倍以下に変更してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記制御装置において、前記複数のクロックのうち、0.1%以上99.9%以下のクロックのクロック幅に変更してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記インピーダンスに関する値は、インピーダンス値であり、
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有してもよい。
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有してもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記命令は、前記駆動周波数を決定するステップにおいて、前記クロック幅を変更した後に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅をさらに変更するステップ、を含んでもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
前記駆動信号の周波数を変化させるステップは、前記複数のクロックのクロック幅を一定にして前記周波数を変化させること、を有し、
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記共振周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記共振周波数を決定できなかった場合、前記クロック幅を変更することが実行されてもよい。
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記共振周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記共振周波数を決定できなかった場合、前記クロック幅を変更することが実行されてもよい。
このような構成により、圧電素子の駆動周波数を適切に制御することができる。
以下、本開示の実施の形態について、添付の図面を参照しながら説明する。また、各図においては、説明を容易なものとするため、各要素を誇張して示している。
本明細書において、「第1」、「第2」などの用語は、説明のためだけに用いられるものであり、相対的な重要性または技術的特徴の順位を明示または暗示するものとして理解されるべきではない。「第1」と「第2」と限定されている特徴は、1つまたはさらに多くの当該特徴を含むことを明示または暗示するものである。
(実施の形態1)
<振動装置の全体構造>
以下に、本実施の形態1に係る振動装置を備える撮像ユニットについて図面を参照しながら説明する。図1は、実施の形態1に係る撮像ユニットの構成を説明するための斜視図である。図2は、実施の形態1に係る撮像ユニットの断面構成を示す概略断面図である。図3は、実施の形態1に係る振動装置の断面構成を示す概略断面図である。図4は、実施の形態1に係る振動装置の各構成部材を示す分解斜視図である。
<振動装置の全体構造>
以下に、本実施の形態1に係る振動装置を備える撮像ユニットについて図面を参照しながら説明する。図1は、実施の形態1に係る撮像ユニットの構成を説明するための斜視図である。図2は、実施の形態1に係る撮像ユニットの断面構成を示す概略断面図である。図3は、実施の形態1に係る振動装置の断面構成を示す概略断面図である。図4は、実施の形態1に係る振動装置の各構成部材を示す分解斜視図である。
図1及び図2に示すように、撮像ユニット100は、筐体1と、振動装置10と、撮像装置5と、を備える。
図1及び図2に示すように、筐体1は、撮像装置5を内包する。筐体1は、振動装置10の一部を露出させる。筐体1の材料は、例えば樹脂である。
図3及び図4に示すように、振動装置10は、透光体2と、透光体2を振動させる振動体12と、透光体2の外周縁で支持するリテーナー13と、を備える。図1に示すように、振動装置10において、透光体2、リテーナー13及び振動体12の一部は、筐体1に設けられた孔から露出している。振動装置10は、透光体2を振動させることにより、透光体2に付着した異物を除去する。
透光体2は、撮像装置5の前面に配置される。振動装置10は、透光体2に付着した異物を除去する。透光体2は、撮像装置5が検出する波長のエネルギー線又は光が透過する透光性を有する。また、透光体2は、集光性を有するレンズであってもよい。
振動体12は、透光体2を振動させて付着した異物を除去する。図4に示すように、振動体12は、筒形状を有する。振動体12には、例えば、透光体2と接する面の反対側の面に中空円状、即ち、環状の圧電素子14が設けられている。さらに、圧電素子14においては、振動体12と接する面の反対側の面に中空円状、即ち環状の電極を有する配線15が設けられている。当該配線15に電圧を印加して圧電素子14を筒状体の振動体12の貫通方向に振動させることにより、振動体12を介して透光体2を振動体12の貫通方向に振動させることができる。
なお、振動体12に設ける圧電素子14の位置は、図3に示す位置に限定されるものではない。
リテーナー13は、振動体12と接続されている。リテーナー13と振動体12とはそれぞれねじ切り加工がされており、リテーナー13と振動体12とはそれぞれのねじ切り加工部分が嵌合して接続されている。リテーナー13の材料は、例えば、ステンレス、アルミニウム、鉄、チタン、ジュラルミン等の金属だけでなく、プラスチックであってもよい。
振動装置10はさらに、透光体2に洗浄液(洗浄体)を吐出して付着した異物を除去する構成をさらに有していてもよい。例えば、図1に示す、透光体2に洗浄液を吐出する洗浄ノズル3は、透光体2に洗浄液を吐出して付着した異物を除去する。
撮像装置5は、振動装置10の透光体2を通して、振動装置10の外部の撮像対象物の撮像を行う。撮像装置5は、例えば、光学素子、撮像素子、センサ部品等を内蔵する。
次に、振動装置10を制御する制御装置50の構成について図を用いて説明する。図5は、本実施の形態1に係る振動装置を制御する制御装置の構成を説明するためのブロック図である。
制御装置50は、プロセッサ20、圧電駆動部30、インピーダンス検出部70、および電源回路80を含んでいる。プロセッサ20は、撮像装置5からの撮像信号を処理するとともに、圧電駆動部30に対して制御信号を供給する制御部である。
プロセッサ20は、制御中枢としてのCPU(Central Processing Unit)、CPUが動作するためのプログラムや制御データ等を記憶しているROM(Read Only Memory)、CPUのワークエリアとして機能するRAM(Random Access Memory)、周辺機器との信号の整合性を保つための入出力インターフェイス等を設けてある。プロセッサ20はまた、マイコン、MPU(Micro-Processing Unit)、GPU(Graphics Processong Unit)、DSP(Digital Signal Processor)、FPGA(Field Programmable Gate Array)、ASIC(Application Specific Integrated Circuit)であってもよい。
圧電駆動部30は、プロセッサ20からの制御信号により、圧電素子14を駆動する駆動電圧、周波数に応じた駆動信号を生成する。
圧電素子14は、圧電駆動部30によって生成された駆動信号が印加され振動する。圧電素子14の振動により、振動体12および透光体2が振動し異物が除去される。圧電素子14を形成する材料としては、例えば、チタン酸バリウム(BaTiO3)、チタン酸・ジルコン酸鉛(PZT:PbTiO3・PbZrO3)、チタン酸鉛(PbTiO3)、メタニオブ酸鉛(PbNb2O6)、チタン酸ビスマス(Bi4Ti3O12)、(K,Na)NbO3などの適宜の圧電セラミックス、またはLiTaO3、LiNbO3などの適宜の圧電単結晶などを用いることができる。
インピーダンス検出部70は、圧電素子14を振動させている場合に、圧電駆動部30のインピーダンスに関する値をモニタしている。インピーダンスに関する値とは、例えば、電流、インピーダンス等である。
電源回路80は、交流電流の信号を出力する。電源回路80の実効電圧は、例えば、0V以上70V以下である。
圧電駆動部30及びインピーダンス検出部70は、例えば、電子回路で実現可能である。圧電駆動部30及びインピーダンス検出部70の機能は、ハードウェアのみで構成してもよいし、ハードウェアとソフトウェアとを組み合わせることにより実現してもよい。圧電駆動部30及びインピーダンス検出部70は、メモリなどの記憶部に格納されたデータやプログラムを読み出して種々の演算処理を行うことで、所定の機能を実現してもよい。
次に、制御装置50の動作について遷移図およびフローチャートに基づいて説明する。図6は、実施の形態1に係る振動装置を制御する制御装置の動作を説明するための動作モードの遷移図である。図7は、実施の形態1に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。
図6に示すように、制御装置50は、サーチモードと駆動モードとで圧電素子14を駆動する。サーチモードは、圧電素子14の共振周波数fcを決定するために圧電素子14を振動させる。駆動モードは、サーチモードで決定した共振周波数fcで振動体12を振動させて透光体2の表面に付着した異物を除去するために圧電素子14を振動させる。サーチモードと駆動モードとは交互に実施される。以下に、サーチモードの詳細なステップを説明する。
実施の形態1におけるサーチモードは、第1サーチステップと第2サーチステップとを含む。第1サーチステップは、駆動信号の周波数frをfminからfmaxの間でスイープさせて圧電素子14の共振周波数fcを探索する。スイープとは、時間経過に伴い、周波数frを段階的に変化させることである。例えば、時間Δt経過毎に周波数frをΔf増加させることである。また、fminは、駆動信号の周波数frの最小値であり、fmaxは、駆動信号の周波数frの最大値である。第2サーチステップは、第1サーチステップで共振周波数fcを探索できなかった場合に実施される。第2サーチステップは、圧電素子14に印加する駆動電圧Vppを変化させることで共振周波数fcを探索する。
まず、制御装置50は、圧電素子14を駆動する駆動信号の駆動電圧Vppを電圧V1に設定し(ステップS1)、駆動電圧Vppの更新回数Nvを1に設定する(ステップS2)。駆動電圧Vppは、例えば交流電圧である。電圧V1の実効電圧は、例えば、0V以上70V以下である。
次に、制御装置50は、駆動信号の周波数frを周波数fminに設定する(ステップS3)。周波数fminは、例えば、20kHz以上1MHz以下である。
次に、制御装置50は、ステップS1で設定した駆動電圧Vpp、及びステップS3で設定した周波数frの駆動信号を圧電素子14に印加する(ステップS4)。
次に、制御装置50は、駆動信号の周波数frにおける圧電素子14のインピーダンス値Zを測定する(ステップS5)。
次に、制御装置50は、測定したインピーダンス値Zが所定の閾値Zth以下であるか否か判定する(ステップS6)。閾値Zthは、例えば、0Ωより大きく、1kΩ以下である。
ここで、図8を参照して、圧電素子14のインピーダンスと共振周波数との関係を説明する。図8は、駆動電圧Vppが一定のときの圧電素子14の共振周波数fcとインピーダンスZとの関係を示す。図8では、横軸を周波数[kHz]、縦軸をインピーダンス[Ω]としている。図8に示すグラフでは、インピーダンスが急激に変化している箇所の周波数が圧電素子14の共振周波数fcである。そのため、駆動信号の周波数frが圧電素子14の共振周波数fcと一致、又は圧電素子14の共振周波数fcに近いとき、測定される圧電素子14のインピーダンス値Zは、閾値Zth以下である。
従って、ステップS5で測定したインピーダンス値Zが閾値Zth以下であると判定した場合、制御装置50は、駆動信号の周波数frを圧電素子14の共振周波数fcとして決定する(ステップS7)。
ステップS5の次に、制御装置50は、共振周波数fcで圧電素子14を振動させて透光体2に付着した異物を除去する駆動モードで動作する(ステップS8)。具体的には、制御装置50は、圧電素子14の共振周波数fcを駆動周波数として決定し、決定した駆動周波数で圧電素子14を駆動する。駆動モードでは、圧電素子14の振動とあわせて、図1に示す洗浄ノズル3から洗浄液を吐出して透光体2に付着した異物を除去してもよい。
ステップS6において、測定したインピーダンス値Zが閾値Zth以下でないと判定した場合、制御装置50は、駆動信号の周波数frをfr+Δfに更新する(ステップS9)。Δfは、例えば、1Hz以上1kHz以下である。
次に、制御装置50は、駆動信号の周波数frが周波数fmaxを超えているか否かを判定する(ステップS10)。周波数fmaxは、例えば、1MHz以下である。
ステップS10で、駆動信号の周波数frが周波数fmaxを超えていないと判定した場合、ステップS4に戻る。
上記のステップS1からステップS10までが第1サーチステップである。ステップS10で、駆動信号の周波数frが周波数fmaxを超えていると判定した場合、以下の第2サーチステップが実施される。
ステップS10で、駆動信号の周波数frが周波数fmaxを超えていると判定した場合、制御装置50は、駆動電圧Vppの電圧波形を変化させる。これにより、圧電素子14に印加する駆動信号の電圧波形が変化する。例えば、電圧波形の実効電圧が変化する。例えば、電圧波形の振幅が変化する。また、例えば、電圧波形の振幅が増加する。また、例えば、電圧波形の振幅が減少する。具体的には、駆動電圧VppをVpp+ΔVに更新する(ステップS11)。ΔVは、正の値であってもよいし、負の値であってもよい。すなわち、圧電素子14に印加する電圧波形の振幅が増加、又は減少する。ΔVの絶対値は、例えば0Vより大きく70V以下である。
次に、制御装置50は、駆動電圧Vppの更新回数NvをNv+1に更新する(ステップS12)。
次に、制御装置50は、ステップS12で更新した更新回数Nvが最大更新回数Nvmaxを超えているか否かを判定する(ステップS13)。最大更新回数Nvmaxは、予め決定された回数であってもよい。Nvmax、例えば、1回以上10回以下である。
ステップS13で更新回数NvがNvmaxを超えていると判定した場合、制御装置50は、エラー(ERROR)を検出し(ステップS14)、サーチモードでの動作を終了する(ステップS15)。
ステップS13で更新回数NvがNvmaxを超えていないと判定した場合、ステップS3に戻る。
ここで、図9A及び図9Bを参照して、駆動電圧Vppの実効電圧が変化したときの圧電素子14の共振周波数とインピーダンスとの関係を説明する。図9Aでは、横軸を実効電圧[V]、縦軸を共振周波数[Hz]としている。図9Aは、実効電圧を10Vから50Vまで10ずつに変化させたときの圧電素子14の共振周波数fcの変化の一例である。図9Aに示すグラフから分かるように、実効電圧が大きくなるに従って圧電素子14の共振周波数fcは減少する。図9Bでは、横軸を周波数[kHz]、縦軸をインピーダンス[Ω]としている。図9Bに示すグラフでは、実効電圧をVpp1からVpp3まで変化させた場合の共振周波数の変化の様子が図示されている。図9Bに示される実効電圧では、Vpp1>Vpp2>Vpp3となっている。図9Bの周波数f1は、fmin≦f1≦fmaxである駆動信号の周波数frの一例である。図9Bのグラフより、実効電圧がVpp1及びVpp2の場合、周波数f1や周波数f1+Δfの駆動信号では、インピーダンス値Zが閾値Zthより大きく、共振周波数fcを探索できない。しかしながら、実効電圧がVpp3の場合、周波数f1の駆動信号により、インピーダンス値Zが閾値Zth以下になる周波数を探索できる。すなわち、ステップS11で駆動電圧VppをVpp+ΔV変化させて、さらにステップS3以降のステップを実施することで、圧電素子14の共振周波数fcを駆動信号の周波数frと一致させる、又は駆動信号の周波数frに近づけることができる。
したがって、上記の制御方法の第2サーチステップを実施することにより、圧電素子14の共振周波数fcの探索性能を向上させることができる。また、上記の制御方法は、プロセッサ20の性能を変更することなく共振周波数の探索性能を向上させることができ、製造コストを抑えることができる。
(実施の形態1の変形例1)
実施の形態1では、第1サーチステップを実施した後に第2サーチステップを実施しているが、第1サーチステップは省略することができる。図10を参照して、本変形例における撮像ユニット100の振動装置10の動作を説明する。図10は、本変形例に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。
実施の形態1では、第1サーチステップを実施した後に第2サーチステップを実施しているが、第1サーチステップは省略することができる。図10を参照して、本変形例における撮像ユニット100の振動装置10の動作を説明する。図10は、本変形例に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。
まず、制御装置50は、駆動信号の周波数frをf0に設定する(ステップS101)。f0は、例えば、先行するサーチモードで探索した任意の共振周波数である。
次に、制御装置50は、駆動電圧VppをV1に設定し(ステップS102)、駆動電圧Vppの更新回数Nvを1に設定する(ステップS103)。
次に、制御装置50は、ステップS101で設定した周波数fr、ステップS102で設定した駆動電圧Vppの駆動信号を圧電素子14に印加する(ステップS104)。
次に、制御装置50は、駆動信号の周波数frにおける圧電素子14のインピーダンス値Zを測定する(ステップS105)。
次に、制御装置50は、測定したインピーダンス値が所定の閾値Zth以下であるか否か判定する(ステップS106)。
ステップS106で測定したインピーダンス値Zが所定の閾値Zth以下であると判定した場合、制御装置50は、駆動信号の周波数frを圧電素子14の共振周波数fcとして決定する(ステップS107)。
ステップS107の次に、制御装置50は、共振周波数fcで圧電素子14を振動させて透光体2に付着した異物を除去する駆動モードで動作する(ステップS108)。具体的には、制御装置50は、圧電素子14の共振周波数fcを駆動周波数として決定し、決定した駆動周波数で圧電素子14を駆動する。駆動モードでは、圧電素子14の振動とあわせて、図1に示す洗浄ノズル3から洗浄液を吐出して透光体2に付着した異物を除去してもよい。
ステップS106で、インピーダンス値Zが所定の閾値Zthを超えていると判定した場合、制御装置50は、駆動電圧VppをVpp+ΔVに更新する(ステップS109)。
次に、制御装置50は、駆動電圧Vppの更新回数NvをNv+1に更新する(ステップS110)。
次に、制御装置50は、ステップS110で更新した更新回数Nvが最大更新回数Nvmaxを超えているか否かを判定する(ステップS111)。
ステップS111で更新回数NvがNvmaxを超えていると判定した場合、制御装置50は、エラー(ERROR)を検出し(ステップS112)、サーチモードでの動作を終了する(ステップS113)。
ステップS111で更新回数NvがNvmaxを超えていないと判定した場合、ステップS104に戻る。
[効果]
上記の制御方法に、圧電素子14の共振周波数fcの探索性能を向上させることができる。また、上記の制御方法は、制御ステップを簡易なものにでき、周波数探索の時間を短縮することができる。
上記の制御方法に、圧電素子14の共振周波数fcの探索性能を向上させることができる。また、上記の制御方法は、制御ステップを簡易なものにでき、周波数探索の時間を短縮することができる。
(実施の形態1の変形例2)
上記の制御方法では、制御装置50は、圧電素子14のインピーダンス値Zを検出しているが、制御装置50は、圧電素子14の電流値Iを検出してもよい。
上記の制御方法では、制御装置50は、圧電素子14のインピーダンス値Zを検出しているが、制御装置50は、圧電素子14の電流値Iを検出してもよい。
電流値はインピーダンスの逆数であるため、制御装置50が圧電素子14の電流値Iを検出する場合、上記の制御方法のステップS5で電流値Iを測定し、ステップS6で電流値Iが所定の閾値Ithより大きいか否かを判定する。
図11に、本変形例に係る振動装置を制御する制御装置の動作を説明するためのフローチャートを示す。
まず、図7に示す実施の形態1のステップS1からステップS4を実施する。
次に、制御装置50によって、圧電素子14の電流値Iを測定する(ステップS5A)。
次に、制御装置50は、ステップS5Aで測定した電流値Iが所定の閾値Ithより大きいか否かを判定する(ステップS6A)。
ステップS6Aにおいて、電流値Iが所定の閾値Ithより大きいと判定した場合、図7に示す実施の形態1のステップS7及びステップS8を実施する。
ステップS6Aにおいて、電流値Iが所定の閾値Ithより大きくないと判定した場合、図7に示す実施の形態1のステップS9及びステップS15を実施する。
[効果]
上記の制御方法によれば、圧電素子14を駆動する駆動周波数を適切に制御できる。具体的には、圧電素子14の共振周波数の探索性能を向上させることができるため、駆動周波数を適切に決定できる。また、上記の制御方法は、圧電素子14の共振周波数fcを決定するための測定値が圧電素子14の電流値Iであるため、測定が容易である。
上記の制御方法によれば、圧電素子14を駆動する駆動周波数を適切に制御できる。具体的には、圧電素子14の共振周波数の探索性能を向上させることができるため、駆動周波数を適切に決定できる。また、上記の制御方法は、圧電素子14の共振周波数fcを決定するための測定値が圧電素子14の電流値Iであるため、測定が容易である。
(実施の形態2)
実施の形態2は、サーチモードで共振数周波数を探索する方法が実施の形態1と異なる。実施の形態2におけるサーチモードは、第1サーチステップと第3サーチステップとを含む。第1サーチステップは、駆動信号の周波数frをfminからfmaxの間でスイープさせて圧電素子14の共振周波数fcを探索する点で、実施の形態1と異なる。第3サーチステップは、第1サーチステップで圧電素子14の共振周波数fcを探索できなかった場合に実施される。第3サーチステップは、駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅を変更することで圧電素子14の共振周波数fcを探索する。ここで、クロック幅を変更することは、デューティ比を変更して行ってもよい。
実施の形態2は、サーチモードで共振数周波数を探索する方法が実施の形態1と異なる。実施の形態2におけるサーチモードは、第1サーチステップと第3サーチステップとを含む。第1サーチステップは、駆動信号の周波数frをfminからfmaxの間でスイープさせて圧電素子14の共振周波数fcを探索する点で、実施の形態1と異なる。第3サーチステップは、第1サーチステップで圧電素子14の共振周波数fcを探索できなかった場合に実施される。第3サーチステップは、駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅を変更することで圧電素子14の共振周波数fcを探索する。ここで、クロック幅を変更することは、デューティ比を変更して行ってもよい。
図12は、実施の形態2に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。図12を参照して、実施の形態2における振動装置の制御方法を説明する。
まず、制御装置50は、駆動電圧VppをVdrに設定する(ステップS201)。電圧Vdrの実効電圧は、例えば、0V以上70V以下である。
次に、制御装置50は、駆動信号に含まれる複数のクロックのクロック幅aをaminに設定し(ステップS202)、クロック幅aの更新回数Ncを1に設定する(ステップS203)。aminは、クロック幅aの最小値であり、例えば、予め設定された値である。aminは、例えば、1usec(1MHz)以上50usec(20kHz)以下である。ここで、駆動信号の周波数frはクロック幅に依拠するため、クロック幅aを設定すると、駆動信号の周波数frはfr(a)に設定される。また、複数のクロックのクロック幅が単一の幅aである場合、fr=fr(a)=aである。そのため、クロック幅aをaminに設定すると、周波数frはfr(a)=amin=fminに設定される。
次に、制御装置50は、ステップS201で設定した駆動電圧Vpp、ステップS202で設定した周波数frの駆動信号を圧電素子14に印加する(ステップS204)。
次に、制御装置50は、駆動信号の周波数frにおける圧電素子14のインピーダンス値Zを測定する(ステップS205)。
制御装置50は、測定したインピーダンス値Zが所定の閾値Zth以下であるか否か判定する(ステップS206)。
ステップS206において測定したインピーダンス値Zが閾値Zth以下であると判定した場合、制御装置50は、駆動信号の周波数frを圧電素子14の共振周波数fcとして決定する(ステップS207)。
ステップS207の次に、制御装置50は、ステップS207で決定した共振周波数fcで圧電素子14を振動させて透光体2に付着した異物を除去する駆動モードで動作する(ステップS208)。駆動モードでは、圧電素子14の振動とあわせて、図1に示す洗浄ノズル3から洗浄液を吐出して透光体2に付着した異物を除去してもよい。
ステップS206において測定したインピーダンス値Zが閾値Zth以下でないと判定した場合、制御装置50は、駆動信号に含まれる複数のクロックのクロック幅aをa+Δaに更新する(ステップS209)。これにより、駆動信号の周波数frはfr(a+Δa)=a+Δaに更新される。Δaは、例えば、1Hz以上1kHz以下である。
次に、制御装置50は、クロック幅aの更新回数NcをNc+1に更新する(ステップS210)。
次に、制御装置50は、ステップS210で更新した更新回数Ncが所定の閾値Ncth1を超えているか否かを判定する(ステップS211)。Ncth1は、例えば、1回以上10回以下である。
ステップS211で更新回数NcがNcth1を超えていないと判定した場合、ステップS203に戻る。
上記のステップS201からステップS211までが本実施の形態における第1サーチステップであり、ステップS211で更新回数NcがNcth1を超えていると判定するとき、駆動信号の周波数frはfmaxに到達している。したがって、第1サーチステップにおいて、駆動信号の周波数frがfminからfmaxまでスイープされる。すなわち、第1サーチステップにおいて、クロック幅はaminからamaxまで変化する。ステップS211で、更新回数NcがNcth1を超えていると判定した場合、以下の第3サーチステップが実施される。
ステップS211において更新回数NcがNcth1を超えていると判定した場合、制御装置50は、複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更する(ステップS212)。言い換えると、いくつかのクロックを複数の第1クロック、残りのクロックを複数の第2クロック、と称し、複数の第1クロックのクロック幅をamaxに維持し、複数の第2クロックのクロック幅をa1に変更する。クロック幅a1は、例えば、クロック幅amaxの1倍未満の値であり、好ましくは0.5倍以上1倍未満の値であり、さらに好ましくは0.99倍以上1倍未満の値である。すなわち、制御装置50は、複数のクロックのうち、いくつかのクロックのクロック幅を他のクロックのクロック幅の1倍未満の値に、好ましくは0.5倍以上1倍未満の値に、さらに好ましくは0.99倍以上1倍未満の値に変更する。また、幅a1は、例えばamax-Δaであり、Δaは、例えばステップS209のΔaと同一である。クロック幅aの変更に伴い、駆動信号の周波数frは、fr(a(amax、a1))に変更される。なお、本実施形態では、複数のクロックのうち複数の第2クロック幅を複数の第1クロック幅の1倍未満としているが、これに限定するものではなく、複数のクロックのうち複数の第2クロック幅を複数の第1クロック幅の1倍より大きくしてもよい。この場合、例えば、複数の第2クロック幅は複数の第1クロック幅の1倍より大きく、1.5倍以下の値であり、好ましくは、1倍より大きく、1.01倍以下である。
また、ステップS212において、制御装置50は、例えば、駆動信号に含まれる複数のクロックのうち0.1%以上99.9%以下のクロックのクロック幅を変更する。図13を参照して具体例を説明する。図13は、クロック幅が変更された、駆動信号に含まれる複数のクロックの一例を示す。図13に示すように、制御装置50は、駆動信号に含まれる複数のクロックのうち1/2(50%)のクロックのクロック幅を幅amaxに変更し、残りの1/2(50%)のクロックのクロック幅を幅a1に変更する。
また、ステップS212において、制御装置50は、例えば、複数のクロックのクロック幅を周期的に変更する。これにより、いくつかのクロックは、複数のクロックにおいて周期的に位置する。例えば、いくつかのクロックは、複数のクロックにおいて等間隔に位置する。具体的には、制御装置50は、駆動信号に含まれる複数のクロックのうち幅amaxのクロックと幅a1のクロックとが交互に含まれるように、複数のクロックのクロック幅を周期的に変更する。
次に、制御装置50は、クロック幅aの更新回数NcをNc+1に更新する(ステップS213)。
次に、制御装置50は、駆動信号の周波数fr(a(amax、a1))における圧電素子14のインピーダンス値Zを測定する(ステップS214)。
次に、制御装置50は、ステップS214で測定したインピーダンス値Zが所定の閾値Zth以下であるか否か判定する(ステップS215)。
ステップS215で測定したインピーダンス値Zが所定の閾値Zth以下であると判定した場合、制御装置50は、駆動信号の周波数frを圧電素子14の共振周波数fcとして決定する(ステップS216)。
ステップS216の次に、制御装置50は、ステップS216で決定した共振周波数fcで圧電素子14を振動させて透光体2に付着した異物を除去する駆動モードで動作する(ステップS217)。具体的には、制御装置50は、圧電素子14の共振周波数fcを駆動周波数として決定し、決定した駆動周波数で圧電素子14を駆動する。駆動モードでは、圧電素子14の振動とあわせて、図1に示す洗浄ノズル3から洗浄液を吐出して透光体2に付着した異物を除去してもよい。
ステップS215において、測定したインピーダンス値Zが閾値Zth以下でないと判定した場合、制御装置50は、駆動信号に含まれる複数のクロックのクロック幅a-Δaに更新する(ステップS218)。これにより、駆動信号の周波数frがfr(a-Δa)に更新される。クロック幅a-Δaに更新するとは、例えば、クロック幅amax及びクロック幅a1を共にΔa減少させることを意味する。Δaは、例えばステップS209のΔaと同一である。
次に、制御装置50は、クロック幅aの更新回数NcをNc+1に更新する(ステップS219)。
次に、制御装置50は、ステップS219で更新した更新回数Ncが閾値Ncth2を超えているか否かを判定する(ステップS220)。Ncth2は、例えば、1回以上10回以下である。
ステップS220で更新回数NcがNcth2を超えていないと判定した場合、ステップS214に戻る。
ステップS220で更新回数NcがNcth2を超えていると判定した場合、制御装置50は、エラー(ERROR)を検出し、サーチモードでの動作を終了する(ステップS221)。
駆動信号に含まれる複数のクロックが2以上のクロック幅を含むと、駆動信号の周波数frは、該2以上のクロック幅に依拠する周波数frとなる。例えば、駆動信号に含まれる複数のクロックがクロック幅A1のクロックをN1%の割合で含み、クロック幅A2のクロックをN2%(N2=100-N1)の割合で含む場合、駆動信号の周波数frは、以下の式1で表される。
(式1)
fr=fr(a(A1、A2))
=N1/100×A1+N2/100×A2
=N1/100×fr(A1)+N2/100×fr(A2)
fr=fr(a(A1、A2))
=N1/100×A1+N2/100×A2
=N1/100×fr(A1)+N2/100×fr(A2)
具体的には、例えば、駆動信号に含まれる複数のクロックが、クロック幅amaxのクロックを50%の割合で含み、クロック幅a1=amax-Δaのクロックを50%の割合で含む場合、駆動信号の周波数frは、以下の式2で表される。
(式2)
fr=fr(a(amax、a1))
=fr(a(amax、amax-Δa))
=50/100×amax+50/100×(amax-Δa)
=1/2×amax+1/2×(amax-Δa)
=1/2×fr(amax)+1/2×fr(amax-Δa)
fr=fr(a(amax、a1))
=fr(a(amax、amax-Δa))
=50/100×amax+50/100×(amax-Δa)
=1/2×amax+1/2×(amax-Δa)
=1/2×fr(amax)+1/2×fr(amax-Δa)
従って、第3サーチステップを実施することにより、fr(amax)とfr(amax-Δa)との間の値の周波数frを有する駆動信号を発出することができる。
ここで図14を参照する。図14は、圧電素子の共振周波数とインピーダンスとの関係を示すグラフにおける、駆動信号の周波数と共振周波数との関係を示す。図14に示すグラフは、横軸を周波数[kHz]、縦軸をインピーダンス[Ω]としている。図14に示す例では、圧電素子14の共振周波数fcがf(amax)とf(amax-Δa)の間に存在する。また、駆動信号の周波数frがf(amax)又はf(amax-Δa)のとき、測定されるインピーダンスZが閾値Zthより大きい。したがって、第1サーチステップでは探索できない。しかしながら、式2に示したように、第3サーチステップを実施することにより、fr(amax)とfr(amax-Δa)との間の値の周波数fr(a(amax、amax‐Δa))を有する駆動信号を発出することができる。これにより、第1サーチステップでは探索できなかったfr(amax)とfr(amax-Δa)との間に存在する共振周波数fcを探索することができる。
[効果]
したがって、上記の制御方法の第3サーチステップにより、プロセッサ20の性能に依らずに、周波数分解能を向上させることができる。これにより、圧電素子14の駆動周波数を適切に制御できる。具体的には、圧電素子14の共振周波数fcの探索性能をより向上させることができるため、圧電素子14の駆動周波数を適切に決定できる。また、高価なプロセッサ20を用いなくてもよいため、製造コストの増大を抑制することができる。
したがって、上記の制御方法の第3サーチステップにより、プロセッサ20の性能に依らずに、周波数分解能を向上させることができる。これにより、圧電素子14の駆動周波数を適切に制御できる。具体的には、圧電素子14の共振周波数fcの探索性能をより向上させることができるため、圧電素子14の駆動周波数を適切に決定できる。また、高価なプロセッサ20を用いなくてもよいため、製造コストの増大を抑制することができる。
(実施の形態2の変形例1)
実施の形態2の制御方法では、第1サーチステップを実施した後に第3サーチステップを実施しているが、第1サーチステップは省略することができる。図15を参照して、本変形例における撮像ユニット100の振動装置10の動作を説明する。図15は、本変形例に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。
実施の形態2の制御方法では、第1サーチステップを実施した後に第3サーチステップを実施しているが、第1サーチステップは省略することができる。図15を参照して、本変形例における撮像ユニット100の振動装置10の動作を説明する。図15は、本変形例に係る振動装置を制御する制御装置の動作を説明するためのフローチャートである。
まず、制御装置50は、駆動電圧VppをVdrに設定する(ステップS301)。
次に、制御装置50は、複数のクロックのうちいくつかのクロックのクロック幅が他のクロックのクロック幅と異なるようにクロック幅を設定する(ステップS302)。例えば、駆動信号に含まれる複数のクロックのうち50%のクロックのクロック幅を幅amaxに設定し、残りの50%のクロックのクロック幅を幅a1に設定する。幅a1は、例えばamax-Δaであり、Δaは、例えば、実施の形態2のステップS209のΔaと同一である。クロック幅の変更に伴い、駆動信号の周波数frは、fr(a(amax、a1))に設定される。
また、ステップS302において、制御装置50が、複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とを異ならせる方法は、実施の形態2のステップS212におけるクロック幅を変更方法と同様の方法を採用できる。
次に、制御装置50は、クロック幅aの更新回数Ncを1に設定する(ステップS303)。
次に、制御装置50は、ステップS301で設定した駆動電圧Vpp、ステップS302で設定した周波数fr(a(amax、a1))の駆動信号を圧電素子14に印加する(ステップS304)。
次に、制御装置50は、駆動信号の周波数fr(a(amax、a1))における圧電素子14のインピーダンス値Zを測定する(ステップS305)。
次に、制御装置50は、ステップS305で測定したインピーダンス値Zが所定の閾値Zth以下であるか否か判定する(ステップS306)。
ステップS305で測定したインピーダンス値Zが閾値Zth以下であると判定した場合、制御装置50は、駆動信号の周波数frを圧電素子14の共振周波数fcと決定する(ステップS307)。
ステップS307の次に、制御装置50は、ステップS407で決定した共振周波数fcで圧電素子14を振動させて透光体2に付着した異物を除去する駆動モードで動作する(ステップS308)。駆動モードでは、圧電素子14の振動とあわせて、洗浄ノズル3から洗浄液を吐出して透光体2に付着した異物を除去してもよい。
ステップS306において、測定したインピーダンス値Zが閾値Zth以下でないと判定した場合、制御装置50は、駆動信号に含まれる複数のクロックのクロック幅a-Δaに更新する(ステップS309)。これにより、駆動信号の周波数frがfr(a-Δa)に更新される。クロック幅a-Δaに更新するとは、例えば、クロック幅amax及びクロック幅a1を共にΔa減少させることを意味する。Δaは、例えば、実施の形態2のステップS209におけるΔaと同一である。
次に、制御装置50は、クロック幅aの更新回数NcをNc+1に更新する(ステップS310)。
次に、制御装置50は、ステップS410で更新した更新回数NcがzNcmaxを超えているか否かを判定する(ステップS311)。最大更新回数Ncmaxは、予め設定された更新回数であってもよい。Ncmaxは、例えば、1回以上10回以下である。
ステップS311で更新回数NcがNcmaxを超えていないと判定した場合、ステップS305に戻る。
ステップS311で更新回数NcがNcmaxを超えていると判定した場合、制御装置50は、エラー(ERROR)を検出し(ステップS312)、サーチモードでの動作を終了する(ステップS313)。
[効果]
上記の制御方法に、圧電素子14の共振周波数fcの探索性能を向上させることができる。また、上記の制御方法は、制御を簡易なものにでき、周波数探索の時間を短縮することができる。
上記の制御方法に、圧電素子14の共振周波数fcの探索性能を向上させることができる。また、上記の制御方法は、制御を簡易なものにでき、周波数探索の時間を短縮することができる。
(実施の形態2の変形例2)
実施の形態2の制御方法では、ステップS212において、制御装置50は、駆動信号に含まれる複数のクロックのうち1/2(50%)のクロックのクロック幅を幅amaxに維持し、残りの1/2(50%)のクロックのクロック幅を幅a1に変更している。しかしながら、プロセッサ20が、複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更する方法はこれに限定されるものではない。
実施の形態2の制御方法では、ステップS212において、制御装置50は、駆動信号に含まれる複数のクロックのうち1/2(50%)のクロックのクロック幅を幅amaxに維持し、残りの1/2(50%)のクロックのクロック幅を幅a1に変更している。しかしながら、プロセッサ20が、複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更する方法はこれに限定されるものではない。
制御装置50は、例えば図16に示すように、駆動信号に含まれる複数のクロックのうち2/3のクロックのクロック幅を幅amaxに維持し、残りの1/3のクロックのクロック幅を幅a1に変更してもよい。この場合、クロック幅a1のクロックは、例えば、3回に1回の周期で発出される。また、この場合、駆動信号の周波数frは、以下の式3で表される。
(式3)
fr=fr(a(amax、a1))
=fr(a(amax、amax-Δa))
=2/3×amax+1/3×(amax-Δa)
=2/3×fr(amax)+1/3×fr(amax-Δa)
fr=fr(a(amax、a1))
=fr(a(amax、amax-Δa))
=2/3×amax+1/3×(amax-Δa)
=2/3×fr(amax)+1/3×fr(amax-Δa)
すなわち、幅amaxのクロックを2/3の割合で含み、クロック幅a1のクロックを1/3の割合で含む駆動信号と、幅amaxのクロックと幅a1のクロックとを同じ割合で含んでいる駆動信号とは異なる周波数frを有する駆動信号を発出できる。
[効果]
上記より、駆動信号に含まれる複数のクロックのクロック幅の変更方法に応じて、種々の周波数frを有する駆動信号を発出することが可能になる。これにより、圧電素子14の駆動周波数を適切に制御できる。具体的には、所望の周波数の駆動信号を発出することができ、共振周波数fcの探索性能を向上させることができるため、圧電素子14の駆動周波数を適切に決定できる。
上記より、駆動信号に含まれる複数のクロックのクロック幅の変更方法に応じて、種々の周波数frを有する駆動信号を発出することが可能になる。これにより、圧電素子14の駆動周波数を適切に制御できる。具体的には、所望の周波数の駆動信号を発出することができ、共振周波数fcの探索性能を向上させることができるため、圧電素子14の駆動周波数を適切に決定できる。
なお、上記実施形態では、制御装置50は、圧電素子14の共振周波数を決定し、決定した共振周波数を、圧電素子14を駆動する駆動周波数とする例について説明したが、これに限定されない。例えば、制御装置50は、圧電素子14の共振周波数を決定せず、圧電素子14のインピーダンスに関する値の変化に基づいて駆動周波数を決定してもよい。
本開示の振動装置を制御する制御方法および振動装置の制御装置は、屋外で使用する車載カメラ、監視カメラ、またはLiDAR等の光センサに利用される振動装置に適用できる。
1 筐体
2 透光体
3 洗浄ノズル
5 撮像装置
10 振動装置
12 振動体
13 リテーナー
14 圧電素子
15 配線
20 プロセッサ
30 圧電駆動部
50 制御装置
70 インピーダンス検出部
80 電源回路
100 撮像ユニット
2 透光体
3 洗浄ノズル
5 撮像装置
10 振動装置
12 振動体
13 リテーナー
14 圧電素子
15 配線
20 プロセッサ
30 圧電駆動部
50 制御装置
70 インピーダンス検出部
80 電源回路
100 撮像ユニット
Claims (16)
- 圧電素子を備えた振動装置を制御装置によって制御する方法であって、
前記圧電素子を駆動する駆動信号の周波数を変化させるステップ、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、
を有する、
方法。 - 前記いくつかのクロックは、前記複数のクロックにおいて周期的に位置する、
請求項1に記載の方法。 - 前記いくつかのクロックは、前記複数のクロックにおいて等間隔に位置する、
請求項1又は2に記載の方法。 - 前記複数のクロックのうち、前記いくつかのクロックのクロック幅を他のクロックのクロック幅の0.5倍以上1倍未満又は1倍より大きく1.5倍以下である、
請求項1から3のいずれか1項に記載の方法。 - 前記複数のクロックのうち、0.1%以上99.9%以下のクロックのクロック幅に変更可能である、
請求項1から4のいずれか1項に記載の方法。 - 前記インピーダンスに関する値は、インピーダンス値であり、
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有する、
請求項1から5のいずれか1項に記載の方法。 - 前記方法は、前記駆動周波数を決定するステップにおいて、前記クロック幅を変更した後に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅をさらに変更するステップ、を含む、
請求項1から6のいずれか1項に記載の方法。 - 前記駆動信号の周波数を変化させるステップは、前記複数のクロックのクロック幅を一定にして前記周波数を変化させること、を有し、
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記駆動周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅を変更することが実行される、
請求項1から7のいずれか1項に記載の方法。 - 圧電素子を備える振動装置を制御する制御装置であって、
プロセッサと、
前記プロセッサにより実行される命令を記憶したメモリと、
を備え、
前記命令は、
前記プロセッサから前記圧電素子に送信される駆動信号の周波数を変化させるステップと、
前記圧電素子のインピーダンスに関する値を測定するステップと、
測定された前記圧電素子の前記インピーダンスに関する値に基づいて前記圧電素子を駆動する駆動周波数を決定するステップと、
を含み、
前記駆動信号の周波数を変化させるステップは、前記駆動信号に含まれる複数のクロックのうちいくつかのクロックのクロック幅と他のクロックのクロック幅とが異なるようにクロック幅を変更すること、を有する、
制御装置。 - 前記いくつかのクロックは、前記複数のクロックにおいて周期的に位置する、
請求項9に記載の制御装置。 - 前記いくつかのクロックは、前記複数のクロックにおいて等間隔に位置する、
請求項9又は10に記載の制御装置。 - 前記複数のクロックのうち、前記いくつかのクロックのクロック幅を他のクロックのクロック幅の0.5倍以上1倍未満又は1倍より大きく1.5倍以下である、
請求項9から11のいずれか1項に記載の制御装置。 - 前記複数のクロックのうち、0.1%以上99.9%以下のクロックのクロック幅に変更可能である、
請求項9から12のいずれか1項に記載の制御装置。 - 前記インピーダンスに関する値は、インピーダンス値であり、
前記駆動周波数を決定するステップは、
前記インピーダンスに関する値が所定の閾値以下であるか否か判定することと、
前記インピーダンスに関する値が所定の閾値以下であると判定したときの前記駆動信号の周波数を前記駆動周波数として決定することと、
を有する、
請求項9から13のいずれか1項に記載の制御装置。 - 前記命令は、前記駆動周波数を決定するステップにおいて、前記クロック幅を変更した後に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅をさらに変更するステップ、を含む、
請求項9から14のいずれか1項に記載の制御装置。 - 前記駆動信号の周波数を変化させるステップは、前記複数のクロックのクロック幅を一定にして前記周波数を変化させること、を有し、
前記インピーダンスに関する値を測定するステップは、クロック幅を一定にして前記周波数を変化させている間、前記インピーダンスに関する値を測定すること、を有し、
前記駆動周波数を決定するステップにおいて、クロック幅を一定にして前記周波数が変化している間に測定した前記インピーダンスに関する値に基づいて前記駆動周波数を決定できなかった場合、前記クロック幅を変更することが実行される、
請求項9から15のいずれか1項に記載の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024511195A JPWO2023188515A1 (ja) | 2022-03-31 | 2022-11-11 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022059993 | 2022-03-31 | ||
| JP2022-059993 | 2022-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023188515A1 true WO2023188515A1 (ja) | 2023-10-05 |
Family
ID=88199938
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/042058 WO2023188515A1 (ja) | 2022-03-31 | 2022-11-11 | 振動装置を制御する制御装置及び振動装置を制御する方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023188515A1 (ja) |
| WO (1) | WO2023188515A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003174784A (ja) * | 2001-12-06 | 2003-06-20 | Asmo Co Ltd | 超音波モータの制御装置、及び超音波モータの制御方法 |
| JP2006033907A (ja) * | 2004-07-12 | 2006-02-02 | Seiko Epson Corp | 圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体 |
| WO2020217600A1 (ja) * | 2019-04-26 | 2020-10-29 | 株式会社村田製作所 | 洗浄装置、洗浄装置を備える撮像ユニット、および洗浄方法 |
-
2022
- 2022-11-11 WO PCT/JP2022/042058 patent/WO2023188515A1/ja unknown
- 2022-11-11 JP JP2024511195A patent/JPWO2023188515A1/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003174784A (ja) * | 2001-12-06 | 2003-06-20 | Asmo Co Ltd | 超音波モータの制御装置、及び超音波モータの制御方法 |
| JP2006033907A (ja) * | 2004-07-12 | 2006-02-02 | Seiko Epson Corp | 圧電アクチュエータの駆動方法、圧電アクチュエータの駆動装置、電子機器、圧電アクチュエータの駆動装置の制御プログラム及び記憶媒体 |
| WO2020217600A1 (ja) * | 2019-04-26 | 2020-10-29 | 株式会社村田製作所 | 洗浄装置、洗浄装置を備える撮像ユニット、および洗浄方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023188515A1 (ja) | 2023-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11073687B2 (en) | Ultra-sonic self-cleaning system | |
| US11467396B2 (en) | Cleaning device, and image capturing apparatus including cleaning device | |
| US10401618B2 (en) | Ultrasonic lens cleaning system with current sensing | |
| US11979669B2 (en) | Cleaning device, imaging unit including the same, and cleaning method | |
| CN110234989B (zh) | 传感器组件的控制系统 | |
| EP1363154A1 (en) | Digital camera having piezo-driven vibrating dust-off glass plate | |
| JP2020501200A (ja) | 異物検出を備える超音波レンズクリーニングシステム | |
| US20210018748A1 (en) | Ultrasound Lens Structure Cleaner Architecture and Method Using Standing and Traveling Waves | |
| US11433426B2 (en) | Vibration device and imaging unit including vibration device | |
| US9667191B2 (en) | Ultrasound lens cleaner driver with frequency selectable oscillator | |
| US11383274B2 (en) | Vibration device and imaging unit including vibration device | |
| US11369996B2 (en) | Vibration device and imaging unit including vibration device | |
| US20210080714A1 (en) | Optical device and optical unit including optical device | |
| WO2023188515A1 (ja) | 振動装置を制御する制御装置及び振動装置を制御する方法 | |
| WO2023188516A1 (ja) | 振動装置を制御する制御装置及び振動装置を制御する方法 | |
| WO2021220539A1 (ja) | 洗浄装置、洗浄装置を備える撮像ユニット、および洗浄方法 | |
| JPWO2023188515A5 (ja) | ||
| CN113891820A (zh) | 振动装置和振动控制方法 | |
| WO2024084743A1 (ja) | 光学装置、および光学装置を備える撮像ユニット | |
| WO2022004060A1 (ja) | 洗浄装置、洗浄装置を備える撮像ユニット、および制御方法 | |
| US20230258924A1 (en) | Cleaning device, imaging unit including cleaning device, and cleaning method | |
| JP2021180411A (ja) | 撮像装置および撮像装置の制御方法 | |
| JPH09126979A (ja) | 水滴検出装置 | |
| JPH0980521A (ja) | カメラ装置 | |
| JPH01215653A (ja) | 水滴除去装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22935644 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2024511195 Country of ref document: JP Kind code of ref document: A |