JP2020163548A - 水平多関節ロボットおよびロボットシステム - Google Patents
水平多関節ロボットおよびロボットシステム Download PDFInfo
- Publication number
- JP2020163548A JP2020163548A JP2019068684A JP2019068684A JP2020163548A JP 2020163548 A JP2020163548 A JP 2020163548A JP 2019068684 A JP2019068684 A JP 2019068684A JP 2019068684 A JP2019068684 A JP 2019068684A JP 2020163548 A JP2020163548 A JP 2020163548A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- axis
- motor
- robot
- force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 abstract description 25
- 239000003638 chemical reducing agent Substances 0.000 description 27
- 239000012636 effector Substances 0.000 description 26
- 238000000034 method Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 125000006850 spacer group Chemical group 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0241—One-dimensional joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
- B25J9/044—Cylindrical coordinate type comprising an articulated arm with forearm providing vertical linear movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
Abstract
Description
前記基台に接続され、第1軸回りに回動する第1アームと、
前記第1アームに接続され、前記第1軸と平行な第2軸回りに回動する第2アームと、
前記第2アームに接続され、前記第1軸と平行な第3軸回りに回動し、かつ、前記第3軸に沿って移動する第3アームと、
前記第2アームに設けられ、前記第3アームを駆動するモーターと、
前記モーターと前記第2アームとの間に設けられ、前記モーターの駆動による反力を検出する力検出部と、を備えることを特徴とする。
前記力検出部によって検出された前記反力に基づいて、前記第3アームの駆動を制御する制御部と、を備えることを特徴とする。
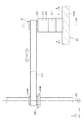
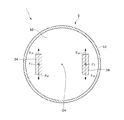
図1は、本発明の水平多関節ロボットおよびロボットシステムの実施形態を示す側面図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示す水平多関節ロボットの第2アームの内部を示す側面図である。図4は、図3中に示す第2アームの内部の一部拡大図である。図5は、図4中A−A線断面図である。図6は、図4中破線で示す領域の拡大断面図である。
図1に示すように、ロボット2は、基台21と、第1アーム22と、第2アーム23と、作業ヘッドである第3アーム24と、力検出部5と、を備えている。第1アーム22、第2アーム23および第3アーム24等によりロボットアーム20が構成される。
ロボット2では、図3に示すように、第2アーム23の筐体230内に、第3アーム24をz軸回りに回転させるu駆動ユニット27と、第3アーム24をz軸方向に移動させるz駆動ユニット28と、ベルト274と、ベルト284と、が設けられている。
図3および図4に示すように、力検出部5は、前述したように第3アーム24に加わる力を検出するセンサーである。本実施形態では、ボールねじナット243と、ベース部230Aとの間に設けられており、これらに固定され、挟持されている。また、図6に示すように、力検出部5は、第1プレート51と、第2プレート52と、第1プレート51と第2プレート52との間に配置された筒状部53と、複数、本実施形態では、2つの素子54とを有する。また、2つの素子54は、第1プレート51と、第2プレート52との間で挟持されている。
図5に示すように、各素子54は、モーター271の出力軸O4を介して対向配置されている。すなわち、第3軸O3の軸方向から見て、モーター271の出力軸O4は、複数の素子54の間にある。これにより、各素子54に加わる力が可及的に均一になり、正確に力を検出することができる。
Claims (5)
- 基台と、
前記基台に接続され、第1軸回りに回動する第1アームと、
前記第1アームに接続され、前記第1軸と平行な第2軸回りに回動する第2アームと、
前記第2アームに接続され、前記第1軸と平行な第3軸回りに回動し、かつ、前記第3軸に沿って移動する第3アームと、
前記第2アームに設けられ、前記第3アームを駆動するモーターと、
前記モーターと前記第2アームとの間に設けられ、前記モーターの駆動による反力を検出する力検出部と、を備えることを特徴とする水平多関節ロボット。 - 前記力検出部は、第1プレートと、第2プレートと、前記第1プレートと前記第2プレートとに挟持されている複数の素子と、を有し、
前記第1プレートは、前記モーターに固定され、
前記第2プレートは、前記第2アームに固定されている請求項1に記載の水平多関節ロボット。 - 前記第3軸の軸方向から見て、前記モーターの出力軸は、前記複数の素子の間にある請求項2に記載の水平多関節ロボット。
- 前記力検出部は、前記第2軸と前記第3軸との間に設置されている請求項1ないし3のいずれか1項に記載の水平多関節ロボット。
- 請求項1ないし4のいずれか1項に記載の水平多関節ロボットと、
前記力検出部によって検出された前記反力に基づいて、前記第3アームの駆動を制御する制御部と、を備えることを特徴とするロボットシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019068684A JP2020163548A (ja) | 2019-03-29 | 2019-03-29 | 水平多関節ロボットおよびロボットシステム |
| CN202010223324.7A CN111745633B (zh) | 2019-03-29 | 2020-03-26 | 水平多关节机器人及机器人系统 |
| US16/832,272 US11458625B2 (en) | 2019-03-29 | 2020-03-27 | Horizontal articulated robot and robot system |
| EP20166305.1A EP3715060B1 (en) | 2019-03-29 | 2020-03-27 | Horizontal articulated robot and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019068684A JP2020163548A (ja) | 2019-03-29 | 2019-03-29 | 水平多関節ロボットおよびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020163548A true JP2020163548A (ja) | 2020-10-08 |
| JP2020163548A5 JP2020163548A5 (ja) | 2022-03-08 |
Family
ID=70108043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019068684A Pending JP2020163548A (ja) | 2019-03-29 | 2019-03-29 | 水平多関節ロボットおよびロボットシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11458625B2 (ja) |
| EP (1) | EP3715060B1 (ja) |
| JP (1) | JP2020163548A (ja) |
| CN (1) | CN111745633B (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07100781A (ja) * | 1993-10-05 | 1995-04-18 | Ricoh Co Ltd | 多関節型ロボット |
| JP2011101907A (ja) * | 2009-11-10 | 2011-05-26 | Seiko Epson Corp | スカラーロボット |
| JP2017177263A (ja) * | 2016-03-29 | 2017-10-05 | セイコーエプソン株式会社 | ロボット、ロボット制御装置、及びロボットシステム |
Family Cites Families (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4573362A (en) * | 1984-07-09 | 1986-03-04 | Eaton Corporation | Multi-axis load transducer |
| WO1987005721A1 (en) * | 1986-03-14 | 1987-09-24 | Fanuc Ltd | Robot controller |
| US4836034A (en) * | 1986-07-15 | 1989-06-06 | Ricoh Company, Ltd. | Force sensing apparatus |
| US4894908A (en) * | 1987-08-20 | 1990-01-23 | Gmf Robotics Corporation | Method for automated assembly of assemblies such as automotive assemblies and system utilizing same |
| US4951517A (en) * | 1987-10-28 | 1990-08-28 | Canon Kabushiki Kaisha | Rotational driving apparatus with frictional engagement and robot using the same |
| US4821584A (en) * | 1988-03-15 | 1989-04-18 | The United States Of America As Represented By The United States Department Of Energy | Piezoelectric film load cell robot collision detector |
| US5144211A (en) * | 1989-01-31 | 1992-09-01 | Staubli International Ag | Multiaxis robot controller having workpoint torque control |
| US5425133A (en) * | 1990-01-24 | 1995-06-13 | Canon Kabushiki Kaisha | Robot apparatus with an electrical driver for controlling a detachable rotor hand |
| US5203748A (en) * | 1990-05-09 | 1993-04-20 | Canon Kabushiki Kaisha | Rotary driving system and robot operating thereon |
| JP2826556B2 (ja) * | 1990-11-28 | 1998-11-18 | キヤノン株式会社 | 工業用ロボツト |
| JPH04256590A (ja) | 1991-02-04 | 1992-09-11 | Fujitsu Ltd | ロボットの制御方法 |
| IT1251017B (it) * | 1991-05-21 | 1995-04-28 | Ugo Crippa | Meccanismo per compiere traiettorie prefissate assimilabili ad ellittiche |
| DE29514892U1 (de) * | 1995-09-16 | 1995-11-23 | Zeiss Carl Fa | Kollisionsschutz für den Meßarm eines Koordinatenmeßgerätes |
| CH690865A5 (de) * | 1996-05-09 | 2001-02-15 | Kk Holding Ag | Kraft- und Momentmessanordnung. |
| US6212968B1 (en) * | 1998-07-29 | 2001-04-10 | Janome Sewing Machine Co., Ltd, | SCARA robot |
| JP2001096480A (ja) * | 1999-09-28 | 2001-04-10 | Tatsumo Kk | 水平多関節型産業用ロボット |
| DE10349452A1 (de) * | 2003-10-23 | 2005-05-25 | Bosch Rexroth Ag | Roboter vom Scara-Typ |
| JP4203051B2 (ja) * | 2005-06-28 | 2008-12-24 | 本田技研工業株式会社 | 力覚センサ |
| JP2008213129A (ja) * | 2007-03-07 | 2008-09-18 | Seiko Epson Corp | 生産システム用汎用セル及び該汎用セルを用いた生産システム |
| DE102008023836B4 (de) * | 2007-05-17 | 2020-10-29 | Denso Wave Inc. | Roboter mit einem linear beweglichen Unterstützungsteil, das an einer Greifvorrichtung befestigt ist |
| JP5235376B2 (ja) * | 2007-10-05 | 2013-07-10 | 川崎重工業株式会社 | ロボットのターゲット位置検出装置 |
| EP2671689B1 (en) * | 2011-01-31 | 2015-02-25 | Toyota Jidosha Kabushiki Kaisha | Multi-joint arm robot, control method, and control program |
| JP2013066954A (ja) * | 2011-09-21 | 2013-04-18 | Seiko Epson Corp | ロボット及びロボットの制御方法 |
| JP6008112B2 (ja) * | 2012-10-23 | 2016-10-19 | セイコーエプソン株式会社 | 水平多関節ロボット |
| TWI546170B (zh) * | 2012-12-24 | 2016-08-21 | 台達電子工業股份有限公司 | 平面關節型機器人驅動機構及其驅動方法 |
| JP2015071214A (ja) * | 2013-10-04 | 2015-04-16 | キヤノン株式会社 | 力覚センサ保護機構、エンドエフェクタ及びロボットアーム |
| CN104596675B (zh) * | 2013-10-31 | 2019-05-14 | 精工爱普生株式会社 | 传感器元件、力检测装置、机器人、电子部件输送装置 |
| TW201521979A (zh) * | 2013-12-10 | 2015-06-16 | Hiwin Tech Corp | 水平多關節機械手臂 |
| JP6252241B2 (ja) * | 2014-02-27 | 2017-12-27 | セイコーエプソン株式会社 | 力検出装置、およびロボット |
| JP6248709B2 (ja) * | 2014-03-04 | 2017-12-20 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| US9718187B2 (en) * | 2014-06-11 | 2017-08-01 | Canon Kabushiki Kaisha | Robot controlling method, robot apparatus, program, recording medium, and method for manufacturing assembly component |
| JP6193816B2 (ja) * | 2014-06-20 | 2017-09-06 | ファナック株式会社 | アームの退避機能を有する多関節ロボット |
| JP6592969B2 (ja) * | 2015-06-02 | 2019-10-23 | セイコーエプソン株式会社 | 嵌合方法 |
| DE102015214170A1 (de) * | 2015-07-27 | 2017-02-02 | Kuka Roboter Gmbh | Roboter mit einer Kraftmesseinrichtung |
| JP1581640S (ja) * | 2016-02-26 | 2017-07-18 | ||
| US10580681B2 (en) * | 2016-07-10 | 2020-03-03 | Yaskawa America Inc. | Robotic apparatus and method for transport of a workpiece |
| US10780535B2 (en) * | 2016-07-21 | 2020-09-22 | Delta Electronics, Inc. | Automatic screw tightening module and robot manipulator employing same |
| JP2018075672A (ja) * | 2016-11-10 | 2018-05-17 | セイコーエプソン株式会社 | 制御装置、ロボットおよびロボットシステム |
| CN107457777A (zh) * | 2017-01-16 | 2017-12-12 | 王晶红 | 一种水平多关节scara型协作机器人 |
| JP2018119923A (ja) * | 2017-01-27 | 2018-08-02 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| JP2018189385A (ja) * | 2017-04-28 | 2018-11-29 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| JP2019012012A (ja) * | 2017-06-30 | 2019-01-24 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| JP6983024B2 (ja) | 2017-10-04 | 2021-12-17 | ローム株式会社 | 絶縁型のdc/dcコンバータ、その一次側コントローラ、電源アダプタおよび電子機器 |
| JP6690626B2 (ja) * | 2017-10-31 | 2020-04-28 | 株式会社安川電機 | ロボットシステムおよびロボットの退避方法 |
-
2019
- 2019-03-29 JP JP2019068684A patent/JP2020163548A/ja active Pending
-
2020
- 2020-03-26 CN CN202010223324.7A patent/CN111745633B/zh active Active
- 2020-03-27 US US16/832,272 patent/US11458625B2/en active Active
- 2020-03-27 EP EP20166305.1A patent/EP3715060B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07100781A (ja) * | 1993-10-05 | 1995-04-18 | Ricoh Co Ltd | 多関節型ロボット |
| JP2011101907A (ja) * | 2009-11-10 | 2011-05-26 | Seiko Epson Corp | スカラーロボット |
| JP2017177263A (ja) * | 2016-03-29 | 2017-10-05 | セイコーエプソン株式会社 | ロボット、ロボット制御装置、及びロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3715060A1 (en) | 2020-09-30 |
| US20200306963A1 (en) | 2020-10-01 |
| EP3715060B1 (en) | 2022-04-06 |
| CN111745633B (zh) | 2024-03-22 |
| CN111745633A (zh) | 2020-10-09 |
| US11458625B2 (en) | 2022-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6862854B2 (ja) | 制御装置、ロボットシステムおよびネジ締めトルク設定方法 | |
| CN111745683B (zh) | 水平多关节机器人 | |
| CN110539301A (zh) | 控制装置、机器人以及机器人系统 | |
| US20170028554A1 (en) | Robot, control apparatus, and robot system | |
| EP3409427B1 (en) | Control device, robot and control method | |
| JP7375345B2 (ja) | ロボット | |
| US20200290199A1 (en) | Robot System, Control Apparatus, And Control Method | |
| JP2020163548A (ja) | 水平多関節ロボットおよびロボットシステム | |
| JP7238489B2 (ja) | 水平多関節ロボット | |
| JP7392326B2 (ja) | ロボット | |
| CN112643683B (zh) | 示教方法 | |
| JP2020131388A (ja) | ロボットシステム、制御装置、および制御方法 | |
| WO2022186050A1 (ja) | 連結装置、ロボット | |
| JP2020196061A (ja) | ロボット | |
| JP2024036496A (ja) | ロボット | |
| JP2023182991A (ja) | ロボット、及びロボットシステム | |
| JP2023105931A (ja) | ロボット | |
| CN116408778A (zh) | 机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221221 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230329 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230725 |